
A survey on perception ability and control architecture of multi-robot system
-
摘要: 为了促进多机器人系统(multi robot system, MRS)的智能化、无人化发展,并提升MRS在不同工作环境中的探测能力和系统的灵活性,本文从MRS的感知能力及其控制系统架构的角度出发,深度调研并分析了MRS相关的研究与工作,重点探讨了空中、地面、水面、水下4种应用环境下的MRS感知能力与控制系统架构,并对未来的研究方向进行展望。本文的结果可对于后续MRS在感知方法和控制系统的选用上提供参考。Abstract: To facilitate the intelligent and unmanned development of multi-robot systems(MRS) and improve their detection capabilities and flexibility in various working environments, beginning with the perspective of MRS’s perception abilities and their control system architecture, this paper presents a thorough investigation and analysis of related research and work on MRS, with a particular focus on exploring the perception abilities and control system architecture of MRS in four application environments: aerial, ground, surface, and underwater. Additionally, it offers a forward-looking perspective on future research directions. The findings of this paper can provide guidance for the subsequent selection of perception methods and control systems in MRS.
-
Keywords:
- multi-robot system /
- mobile robot /
- drone /
- unmanned ship /
- underwater robot /
- perception /
- control /
- synergy
-
在过去的几十年里,通信技术和控制技术迎来飞速的发展,使得机器人技术在各种工作领域发挥了巨大作用,机器人技术也被应用在诸如地图探勘[1]、安全巡逻[2]、远程监控[3]、生命搜索[4]与特种救援[5]、物体运输[6]等各个方面。其中,多机器人系统(multi robot system, MRS)由于其时间、空间、功能、信息和资源的分布性特性,使得其性能远超独立机器人系统,是机器人领域的一个重要发展方向。与独立机器人系统相比,MRS能够通过功能结构相对简单的个体协作完成功能相对复杂的作业需求,以极低成本设计完成极高效率作业,拥有更大负载能力、更大作业空间、更好系统冗余度等特点。因此,MRS受到了不同研究团队的广泛关注。在众多针对MRS的研究中,涉及MRS的感知能力与控制架构等方面,尚无系统调研与综述工作报导。为此,本文从MRS的感知能力与控制架构方面,广泛调研并深入总结了相关研究成果。
MRS的控制架构是指机器人集群所采用的系统控制架构模式,常用控制架构包括集中式、分布式和混合式3种。其中MRS集中式控制架构是由单个机器人集中收集和处理数据并将决策下发给其他机器人,实现整个MRS的协调控制。这种架构有如下明显的特点:1)高度统一性,由中央控制单元负责指挥和管理,实现行为和决策的集中统一管控;2)全局规划和协调性强,提高系统协作效率;3)管理维护简便,更方便监视和维护系统的运行状态。
分布式控制架构指多个独立的控制单元或节点在分布式环境中协同工作,各个机器人单独处理自身传感器收集或邻近机器人共享的数据,分别做出符合MRS团队需要的决策。这种控制架构的特点在于:1)高可靠性和容错性,当某个单元发生故障或失效时,其他单元仍然可以继续运行;2)响应速度快、通信负担小,各个单元可以同时并行处理任务,不需要大量的数据传输;3)高灵活性和可扩展性,系统可以随意添加或删除控制节点。
混合式控制架构是在部分情况下MRS并没有完全的遵循集中式或分布控制架构,即分布式控制架构与集中式控制架构在系统中得以混合串/并联实现。这种架构的特点是:1)多数据融合效果好,可以对各类传感器的数据进行融合和处理,以获取更加全面和准确的信息;2)高效协同性,充分利用集中式和分布式控制的优势,以实现更复杂情况下高效的任务执行能力;3)灵活性和扩展性强,可以根据具体的需求和环境进行灵活调整和扩展,以适应系统的变化和需求。
MRS感知能力则是指机器人集群及个体具备感知环境的传感硬件及其信息处理能力,按其传感器系统完整度来看,可将其划分为拥有完整传感系统的全传感方式、拥有部分传感硬件故障/缺失的少传感方式以及基于模型的传感信息估计的无传感方式。通常大部分MRS的感知能力是采用拥有完整传感系统的全感知,选择根据自身需求的传感器搭配使用,收集必要的环境信息和机器人状态,达到期望工作的控制信息即可,具有高精度和稳定性。但由于通信技术、传感器感知和复杂环境等多种因素影响,传感器系统可能出现部分失效或损坏,导致中心控制器不能及时对当前环境和机器人状态做出正确判断,从而影响任务进度。所以对于少传感器甚至无传感器的研究是必要的,基于模型估计的无传感方式能够显著降低成本,因为它们无需实际的传感器设备,并且能够减少组件和设备的数量,从而简化整个系统的设计和实施。另外,结合多种数据源和技术可以提供更全面、准确的信息。
1. 空中MRS
由于空中机器人拥有体积小、速度快、灵活度高等一系列优点,使其在民用和军事方面发挥着重要作用。当前,空中MRS的主要应用在动态目标跟踪、空域轻载运输、环境搜索勘探等领域,如表1所示。
表 1 空中MRS的主要应用分类Table 1 Main application classification of airborne MRS1.1 动态目标跟踪
1.1.1 感知能力
面向于动态目标跟踪领域的MRS感知能力研究用于多个无人机协同工作,通过传感器系统感知跟踪一个或多个目标,并确保它们在有限视野范围内执行特定的任务,如图1所示。部分学者对于如何使用传感器来提高MRS的目标跟踪数量做出大量研究,Pan等[12]提出一种多无人机(unmanned aerial vehicles,UAVs)系统通过视觉监视系统跟踪多个目标的方法,UAVs与目标的距离、目标的运动方向和机动性,通过最为覆盖优先算法提高无人机覆盖范围内目标的总数。Farmani等[13]也研究多UAV系统通过调整万向节摄像机传感器的姿态跟踪地面多个移动目标的方法,通过贪婪算法显著提高跟踪目标的最大数量。Li等[14]则通过配备深度图像(red green blue-depth, RGB-D)摄像的多无人机系统对目标的协同跟踪控制。除对多目标的全传感跟踪进行深入研究外,部分学者也开始探索在少传感和无传感情况下的目标跟踪问题。Capitan等[15]研究了基于部分可观测马尔可夫决策框架的多UAV系统最优决策问题,提高实际情况中跟踪目标的能力。Kothari等[16]使用滑模目标跟踪方法来补偿多UAV系统的摄像头和速度传感器等不确定信息,加强不确定情况下UAV系统针对运动目标的跟踪能力。相较于其他学者对地面等二维目标的运动跟踪,Dulce-Galindo等[17]认为对于三维运动物体的研究是必要的,因此提出了基于多机载单目摄像系统的伪立体视觉协同测量系统,通过三角测量运动物体的相对位置,实现空中机器人对三维运动物体的动态跟踪。
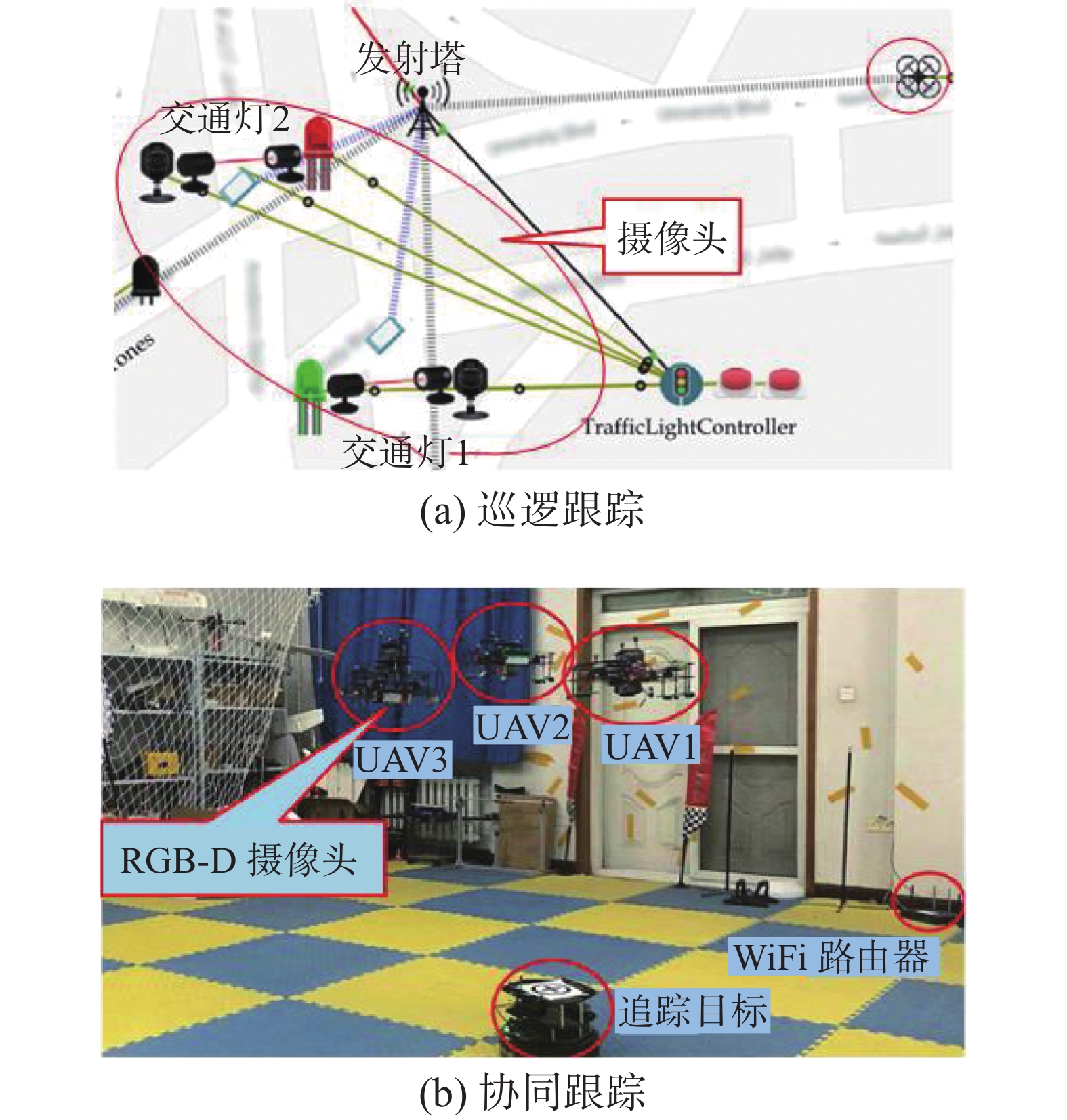 图 1 动态目标跟踪的感知能力Fig. 1 Perception capability of dynamic target tracking
图 1 动态目标跟踪的感知能力Fig. 1 Perception capability of dynamic target tracking 下载:
全尺寸图片
下载:
全尺寸图片
1.1.2 控制架构
面向于动态目标跟踪领域MRS往往具备不同的控制架构,如图2所示,提升编队的跟踪精度至关重要,因为目标的运动和环境的变化都会影响飞行状态。为解决此问题,学者通过多种方法来优化MRS的分布式控制架构。Qian等[18]研究一种多UAV在输入约束和执行器故障时的分布式容错跟踪控制方法,确保系统在实际执行器发生故障时,依旧保持高度的跟踪精度和快速响应率。Chen等[19]提出基于最优观测点的双无人机系统分布式运动控制方案,在保证最大通信距离和最小安全跟踪距离下,提高对单个运动目标的跟踪精度。Chen等[20]研究多无人机系统的分布式协同跟踪方法,利用共识算法收集各个无人机感知的环境信息,提升对目标的实时跟踪精度。Pham等[21]研究用于监测和跟踪野火发展情况的分布式控制算法,使得无人机在通信范围内可以与其他无人机进行通信和信息交换。而Hu等[22]则对多无人机系统控制架构下能源的损耗和目标的移动速度进行研究,提出了在城市环境中基于分布式模型预测控制(distributed model predictive control, DMPC)–广义变域的多架固定翼无人机的分布式控制,尽可能地降低无人机系统的能源消耗。Zhang等[23]开展传感器和执行器都发生故障情况下的研究,提出一种多无人机的分布式快速管模型预测控制(fast tube model predictive control,FTMPC)策略,在故障检测策略中引入估计参数,提高无人机编队跟踪的稳定性。Brandão等[24]提出基于德劳内(delaunay)三角测量的多无人机制导的集中式控制策略,降低编队在跟踪任务中控制问题的复杂性。
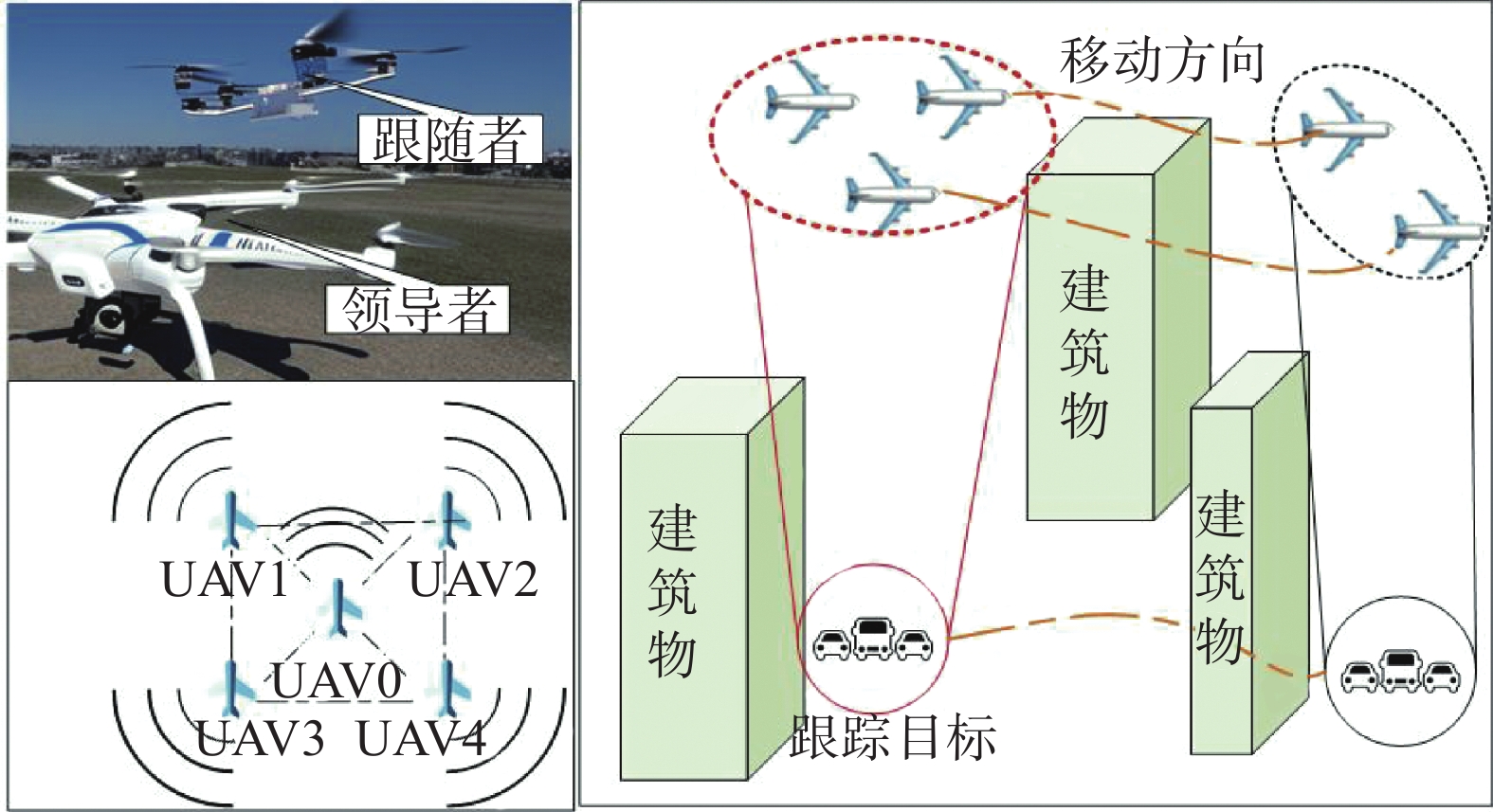 图 2 动态目标跟踪的控制架构Fig. 2 Control architecture for dynamic target tracking下载:
全尺寸图片
图 2 动态目标跟踪的控制架构Fig. 2 Control architecture for dynamic target tracking下载:
全尺寸图片
动态目标跟踪牵涉到多个无人机协同工作,跟踪一个或多个目标,并确保它们有限视野范围内执行特定的任务。当前主要存在问题有:1)目标检测与识别不完整,跟踪性能依赖于无人机的目标检测和识别精度;2)通信与协同不到位,系统实时通信要求高;3)路径规划重复冲突,需要规划适当的路径,确保在跟踪过程中目标的运动路线得到有效的覆盖,并且无人机之间不会相互干扰;4)位置估计与控制不精确,无人机需准确估计机载位置,并能精确控制飞行以实现目标跟踪。
1.2 空域轻载运输
1.2.1 感知能力
面向于空域轻载运输领域如图3所示,无人机通常利用视觉同时监测负载位置、状态以及周围环境的变化。Maza等[6]就提出空中无人机系统在运输货物时由机载摄像头、地面摄像头和无线传感器网络监测组成感知子系统,提高多架UAV在运输悬挂作业时的精准信息反馈能力。Villa等[25]研究多个四旋翼机通过4个摄像头捕捉杆状载荷的运动轨迹,提高飞行的稳定性。Lieret等[26]提出使用机载摄像头和超宽带(ultra-wide band,UWB)跟踪系统结合的多无人机系统移动运输方法,实现无人机在室内的自主飞行运输。
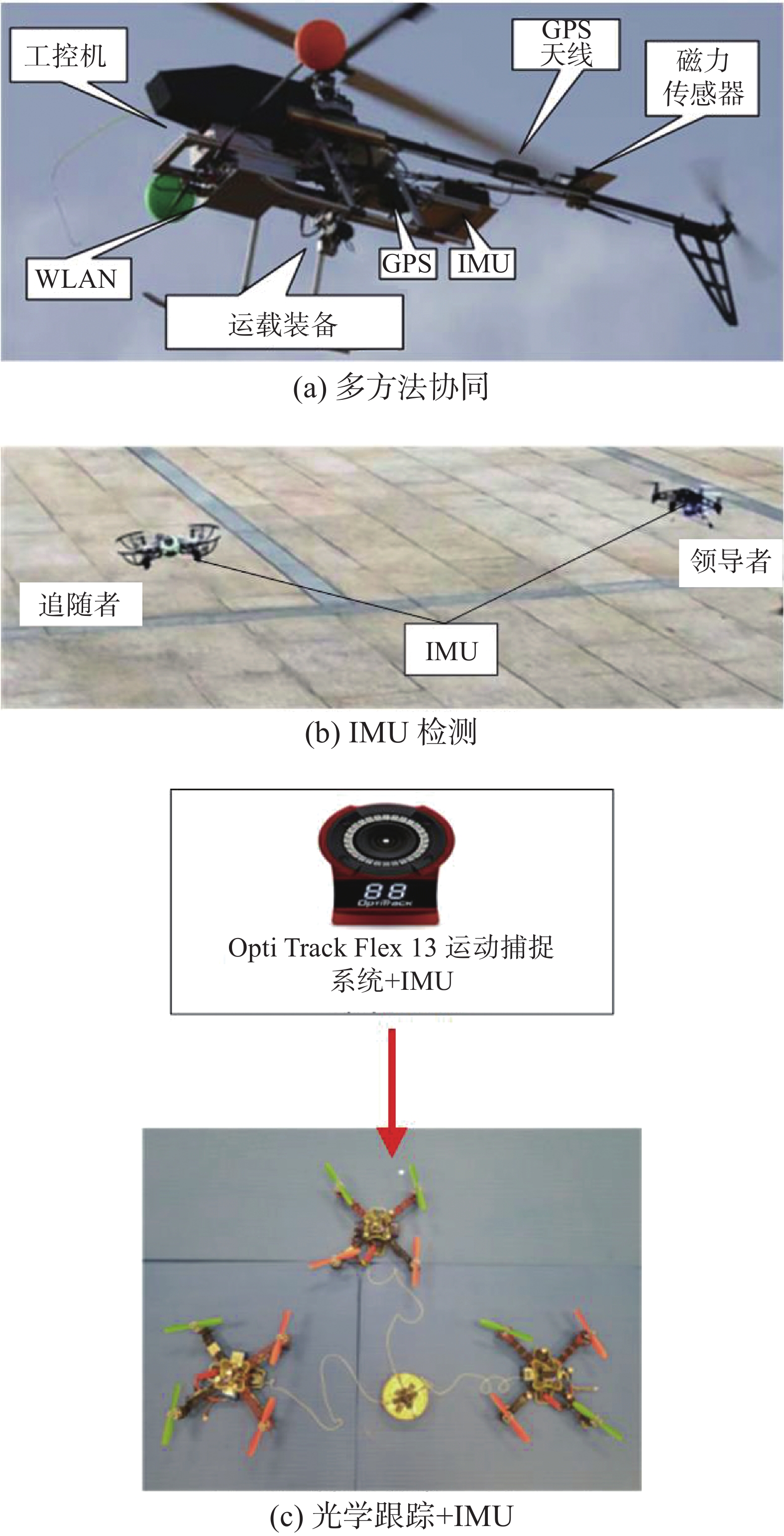 图 3 空域轻载运输的感知能力Fig. 3 Perception of light-load transport in airspace下载:
全尺寸图片
图 3 空域轻载运输的感知能力Fig. 3 Perception of light-load transport in airspace下载:
全尺寸图片
同样,姿态传感器也常用于无人机的载荷运输,Xie等[8]研究了仅需惯性测量单元(inertial me-asurement unit,IMU)反馈计算而无视觉信息的空中机器人轻载运输方法,在最小传感要求时拥有较高效率。Keyvan等[27]提出一种多无人机运输系统的控制方法,通过光学跟踪系统和IMU测量机载电缆载荷时的飞行姿态。Bacelar等[28]研究了基于IMU、超声波和多摄像头等传感器的四旋翼机载负荷协同运输方法,增强无人机的稳定性。
1.2.2 控制架构
面向于空域轻载运输领域如图4所示,不同MRS控制架构对编队控制稳定性、安全性有重要影响。
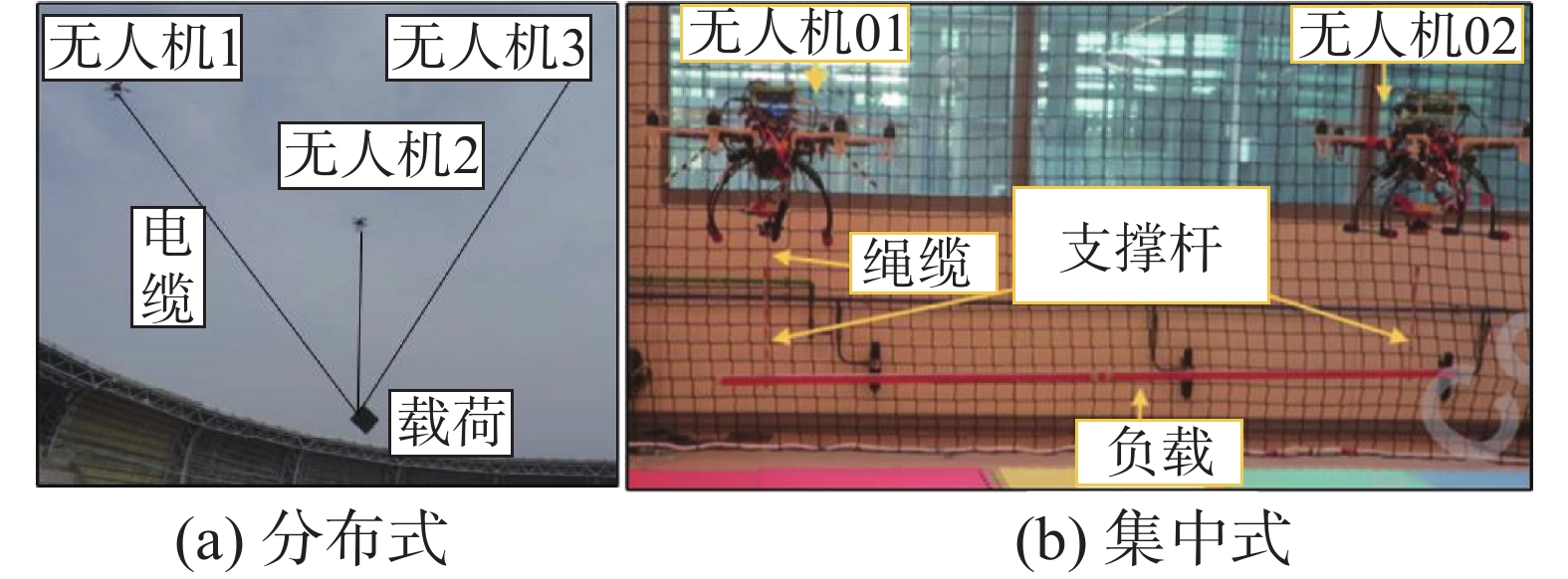 图 4 空域轻载运输的控制架构Fig. 4 Control architecture for light load transport in airspace下载:
全尺寸图片
图 4 空域轻载运输的控制架构Fig. 4 Control architecture for light load transport in airspace下载:
全尺寸图片
在分布式控制架构中各无人机都能够感知环境和负载状态,并通过实时信息共享,共同决策和规划路径。Omar等[29]就提出面向四旋翼机编队协同运载的新型分布式滑模控制(sliding mode control, SMC)策略,增强运输时无人机的鲁棒性。Shirani等[30]则将多无人机协同运输问题转化为无人机编队的分布式控制问题,以最小摆动的方式运输载荷。针对未知尺寸、可变质心等物体的协同运输,Abhinay等[31]研究多无人机运输悬挂载荷的自适应分布式控制策略,在外部干扰等不确定作用下仍能有效运输不同尺寸、形状和未知质量的负载。Thapa等[32]研究基于新型力共识算法的多旋翼飞行器自适应分布式控制,在未知载荷货物重量下分布式控制每架无人机,降低协同运输功耗。集中式控制也在可变载荷运输中被采用,Aghdam等[33]研究多无人机系统运输可变质心荷载的集中式控制方法,领导者遵循期望轨迹,追随者保持期望的相对位置和方向,通过多代理方法解决唯一领导者发生错误而导致任务失败的问题。Lin等[34]研究了多无人机和多辆卡车协同运输的混合式控制,使无人机运输完成后快速返回卡车进行能源和货物补充,提高无人机在封闭管理期间的运输效率。Mohiuddin等[35]采用集中式无人机轨迹控制架构,对携带载荷的无人机的输出功率进行合理分配,以便达到良好的飞行状态。
针对空中MRS载荷运输问题,通信具备如下不足:1)续航时间缩短,携带负载意味着无人机消耗的能量更多,因此其续航时间缩短;2)机动性降低,无人机在携带载荷后其灵活性和机动性下降,无法快速地响应指令和调整航向;3)感知能力受限,负载可能限制无人机的感知能力,使其无法携带复杂的传感器或设备;4)避障能力不足,在携带负载后整个系统的体积变大,需要注意避免与其他障碍物或飞行器的碰撞,确保编队飞行的安全性。
1.3 环境搜索勘探
1.3.1 感知能力
面向于环境搜索勘探领域的MRS如图5所示,需要搭载各种传感器或技术,以应对不同目标区域下环境感知和搜索需求。视觉传感器是环境搜索中常见的传感方式,用于获取目标区域的图像信息。Ravankar等[36]研究使用低成本传感器(如RGB-D相机)融合信息的无人机团队的环境搜索方法,使用OctoMap的三维重建方法减少系统地图绘制的时间,增加环境搜索时间。Horyna等[37]提出基于机载RGB相机检测候选感兴趣目标的搜索方法,自适应通信策略能够使得无人机系统在苛刻的户外环境中依旧可以进行环境搜索。Yokoyama等[38]研究无人机通过相机鸟瞰视野,并控制三维环境中多个地面机器人搜索资源的方法。气体传感器是一种有效检测目标区域气体浓度的途径,主要用于监测有害气体、污染物等,Steiner等[39]提出一种通过分子特性光谱仪(molecular property spectrometer, MPS)传感器检测定位化学泄漏源的多无人机系统的协调搜索方法,由粒子群算法结合激光传感器感知的环境障碍物情况,生成路径点来定位化学源。虽然大多数无人机依靠自身配备的传感器对环境进行搜索探勘,但部分特殊环境无人机无法抵达,因此需要联合地面机器人或水面机器人组成协作系统。Pace等[40]提出一种由近程、位置和环境传感器反馈信息的空地多无人机团队协作的区域搜索方法,加强在固定区域的搜索能力。而Zhu等[41]对空海协作有很深的研究,提出了配备声纳、雷达和环境传感设备等传感器的无人水面艇(unmanned surface vessel,USV)–UAV搭配的水面环境搜索检测,在大雾情况下,UAV可以在USV的指挥下快速覆盖大多数障碍物或危险区域上方的广阔区域。
 图 5 环境搜索勘探的感知能力Fig. 5 Perception ability of environmental search and exploration下载:
全尺寸图片
图 5 环境搜索勘探的感知能力Fig. 5 Perception ability of environmental search and exploration下载:
全尺寸图片
1.3.2 控制架构
面向于环境搜索探勘领域的MRS控制架构研究如图6所示,多通过分布式或集中式控制来实现无人机之间的协调、高效和安全执行环境勘探任务。研究人员通过分布式架构控制无人机的飞行状态,使其拥有大搜索范围和高搜索效率。Gao等[42]研究了在对抗环境中分布式在线搜索–攻击自组织算法的多无人机分布式控制算法,以最大幅度地提高搜索覆盖率并减少搜索时间。面向通信中继网络和探索区域监视任务,De Moraes等[43]研究了多无人飞行器群的分布式控制方法,提升搜索范围。Yao等[44]提出用于海洋目标搜索的多无人机系统的分布式模型预测控制方法,提高了搜索效率。Chen等[45]提出一种自组织分布式多无人机搜索决策架构,提高无人机在不确定环境中的搜索效率,并且减少了计算量和通信量。Wang等[46]提出了基于森林场景下自适应多重修剪搜索的多无人机最优分布式静态控制方案。此外,Liu等[47]针对非理想传感和通信状态下多无人机系统的分布式搜索问题,通过融合算法收集更多的环境信息。Ji等[48]也提出在有限传感和通信情况下的多无人机的分布式协同搜索策略,能够在非凸环境中更快地搜索到目标。集中式控制架构也有较多运用,Yue等[49]提出一种新的基于多蜂群(multi-bee-colony,MBC)协同搜索算法的多无人机集中控制策略,可以自动调整飞行高度以适应不同的海域环境。Garg[50]研究了基于VRFA的多无人机系统的集中式协同搜索,用于气味搜索场景。
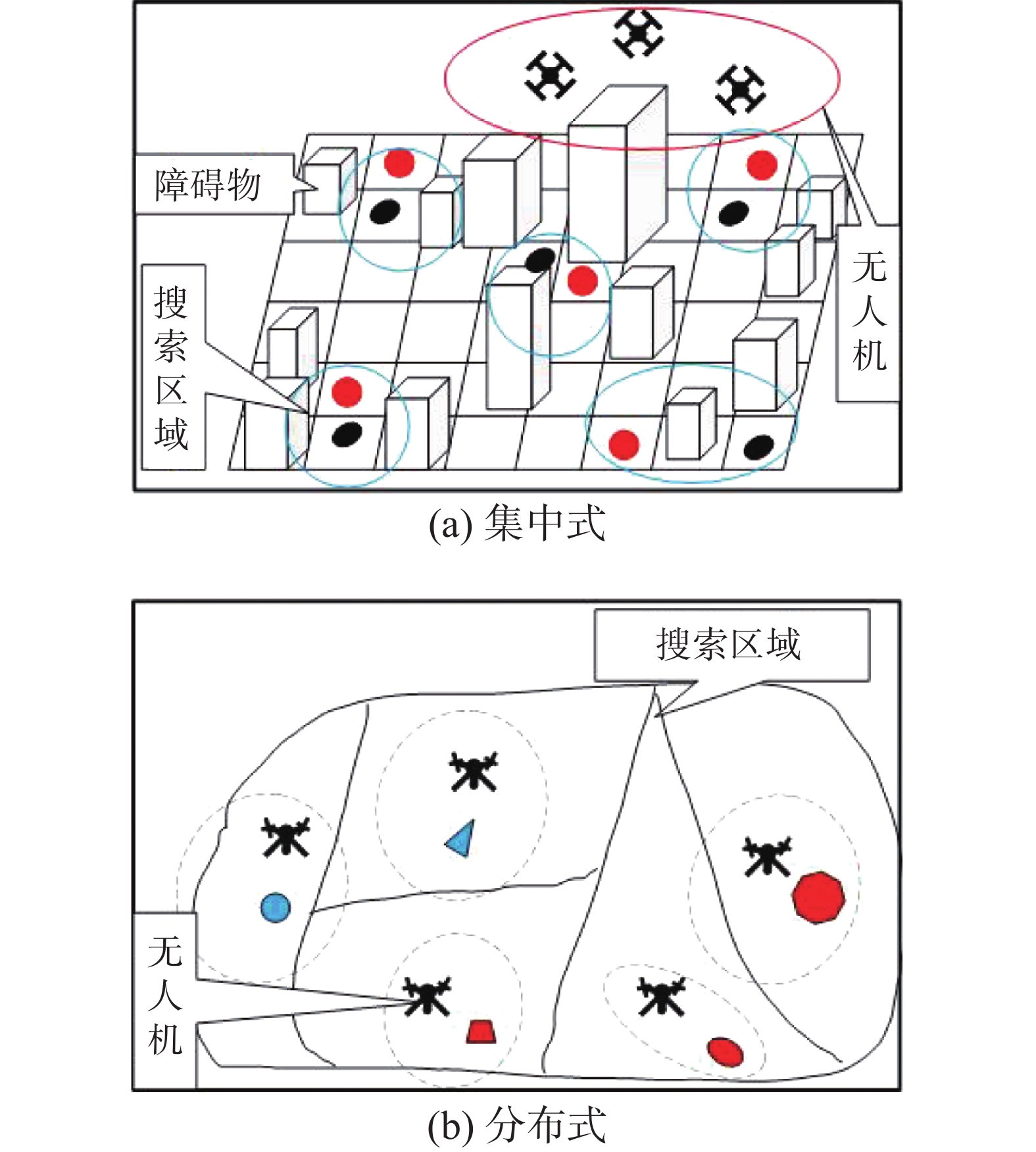 图 6 环境搜索勘探的控制架构Fig. 6 Control architecture for environmental search exploration下载:
全尺寸图片
图 6 环境搜索勘探的控制架构Fig. 6 Control architecture for environmental search exploration下载:
全尺寸图片
环境搜索探勘是通过多无人机协同工作,对目标区域进行搜索、勘探和信息搜集的过程。潜在研究内容有:1)路径规划和通信协调,如何规划多个无人机的飞行路径,使它们能够高效地覆盖整个目标区域,并且确保无人机之间进行实时通信,以相互共享信息、位置和任务进展;2)感知和探测技术,无人机都配备合适的传感器,以便检测目标或获取有关目标区域的信息;3)资源管理分配,确保每个无人机具有足够的续航时间和能量,以执行任务并返回。
2. 地面MRS
地面MRS在实际应用中最为常见,正逐渐成为简单且高重复度工作的主要生产力。地面MRS的主要用途如表2所示,包括地面载荷运输、固定机械臂操作、自主导航避障、环境搜索勘探等。
表 2 地面MRS的主要应用分类Table 2 Main application classification of ground multi robot systems文章 应用场景 控制框架 传感能力 Jiang等[51] 环境搜索 混合式控制 直接使用机载激光雷达传感器观察信息 Luo等[52] 环境搜索 集中式控制 携带测绘传感器和定位传感器的地面机器人的勘探区域 Anderson等[53] 环境搜索 分布式控制 仅由局部LED测距仪和扫描仪的信息识别搜索目标 Wahid等[54] 移动运输 集中式控制 由ECU和IMU测量车辆速度和横摆率值 Tatsumi等[55] 移动运输 分布式控制 没有外力传感器的情况实现多个机器人的移动运输 Mendiburu等[56] 导航避障 分布式控制 通过里程计、指南针和激光测距传感器收集信息 Bai等[57] 导航避障 集中式控制 使用激光扫描仪感知障碍物的位置 Ravankar等[58] 导航避障 混合式控制 装配摄像头和激光传感器感知环境 Zhou等[59] 原位操作 分布式控制 无力矩传感器力/位置的可重构机械手反馈控制 Peng等[60] 原位操作 集中式控制 通过接触力传感器协调摩擦抓取能力 2.1 地面载荷运输
2.1.1 感知能力
面向于地面载荷运输领域的MRS感知能力研究如图7所示,是指在携带载荷的情况下,通过各种传感技术对携带的载荷情况进行感知和监测,确保载荷运输的安全性、稳定性。Rauniyar等[61]提出超机器人极限负载能力的MRS协同运输方法,系统通过超声波传感器与相机等传感信息反馈,控制机器人通过狭窄平面道路和障碍物到达期望目标位置。Hichri等[62]提出通过具有简单架构的多同构移动机械手协同操纵、提升和运输的方法,通过mbot机器人进行了实验验证。地面机器人都需要搭载定位和导航传感器,以确保载荷运输的准确性和精确性,并规划最优路径进行搬运。Amanatiadis等[63]根据激光传感器、相机等车载传感器识别转运架的移动位置,实现MRS对车辆的提取和运输。Yan等[64]研究一种基于启发式算法的MRS的移动运输方法,并进行了实验验证,该方法可大幅度减少运输时间并保持较低能耗。Hu等[65]提出一种基于激光雷达实时检测物体信息的多机器人协同推移运输方法。而Manko等[66]则利用激光传感信息构建的实时地图信息,通过Q–学习提高机器人系统在复杂环境中大型物体运输能力。摄像头或其他视觉传感器主要是辅助检测载荷的变化以及障碍物。
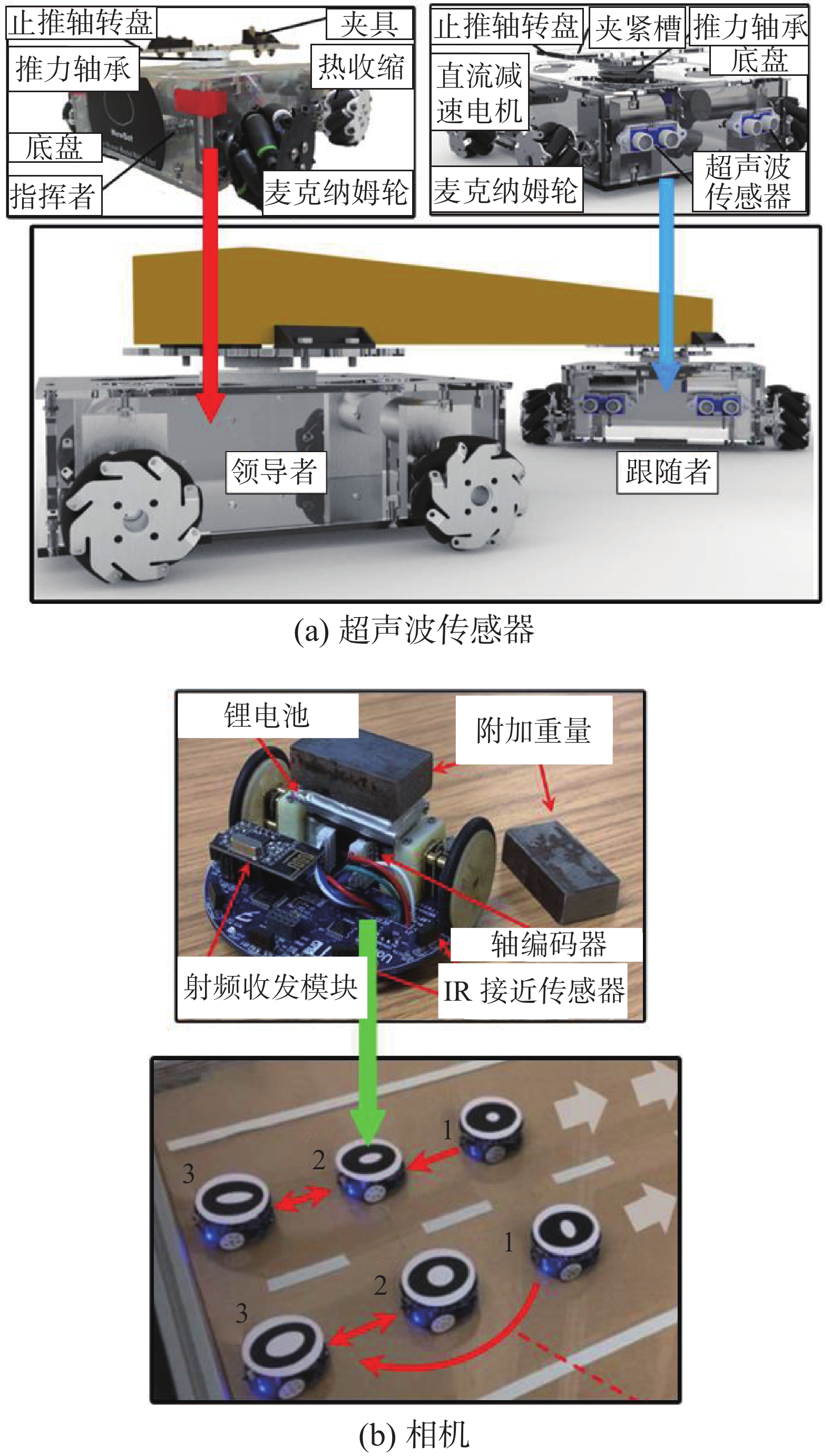 图 7 地面载荷运输的感知能力Fig. 7 Perception of ground load transport下载:
全尺寸图片
图 7 地面载荷运输的感知能力Fig. 7 Perception of ground load transport下载:
全尺寸图片
2.1.2 控制架构
面向于地面载荷运输领域的MRS控制架构研究,是指在携带载荷的情况下,通过分布式、混合式控制来实现载荷的协同搬运和运输,如图8所示。路径规划与协同决策是分布式控制中的关键技术之一,主要通过协同决策,避开障碍物并找到最优运输路径。Zhang等[67]提出改进粒子群算法与人工势场结合的多机器人分布式控制策略,提高路径规划和避障能力。Harik等[68]则提出一种在不安全环境下空地协作的分布式移动运输方法,无人机感知环境信息指挥每个具有独立视觉跟踪器的地面机器人,实现带载移动并避障。分布式控制策略使得系统具备较高的灵活性,系统节点可以独立运行,Habibi等[69]研究了基于树算法的MRS的分布式运动控制方法,每个机器人在自己的局部坐标系中学习到移动运输方向向量,便于运输物体。Yang等[70]提出非完整机器人群在狭隘空间内分布式协同运输系统,机器人仅需感知自身的局部坐标即可直接用于运动规划。Farivarnejad等[71]提出一种MRS的分布式滑模控制方法,仅依靠对机器人的速度和航向的局部测量,就可以实现整个团队的移动运输。分布式控制架构拥有良好的容错性,使得机器人能够灵活适应任务和环境的变化。Zhang等[72]研究基于深度Q网络(deep Q-network, DQN)的MRS的分布式协同运输方法,每架机器人的控制器直接根据传感数据做出决策,减少因个体数量增加带来的控制复杂性,增强超大物体的运输能力。Kashiwazaki等[73]研究了主从分布式MRS协调运输控制算法,跟随者即使出现运动误差也能将汽车运输到目标位置。混合式控制架构将集中式控制和分布式控制相结合,以充分发挥两者的优势,提高编队地面机器人的协作效率和任务完成能力。Dai等[74]提出一种混合式控制的策略,采用可以大幅度减少机器人数量、物体旋转角度和通信时间的笼形结构运输物体,使得MRS能够将凸变形物体固定并运输到预期位置。
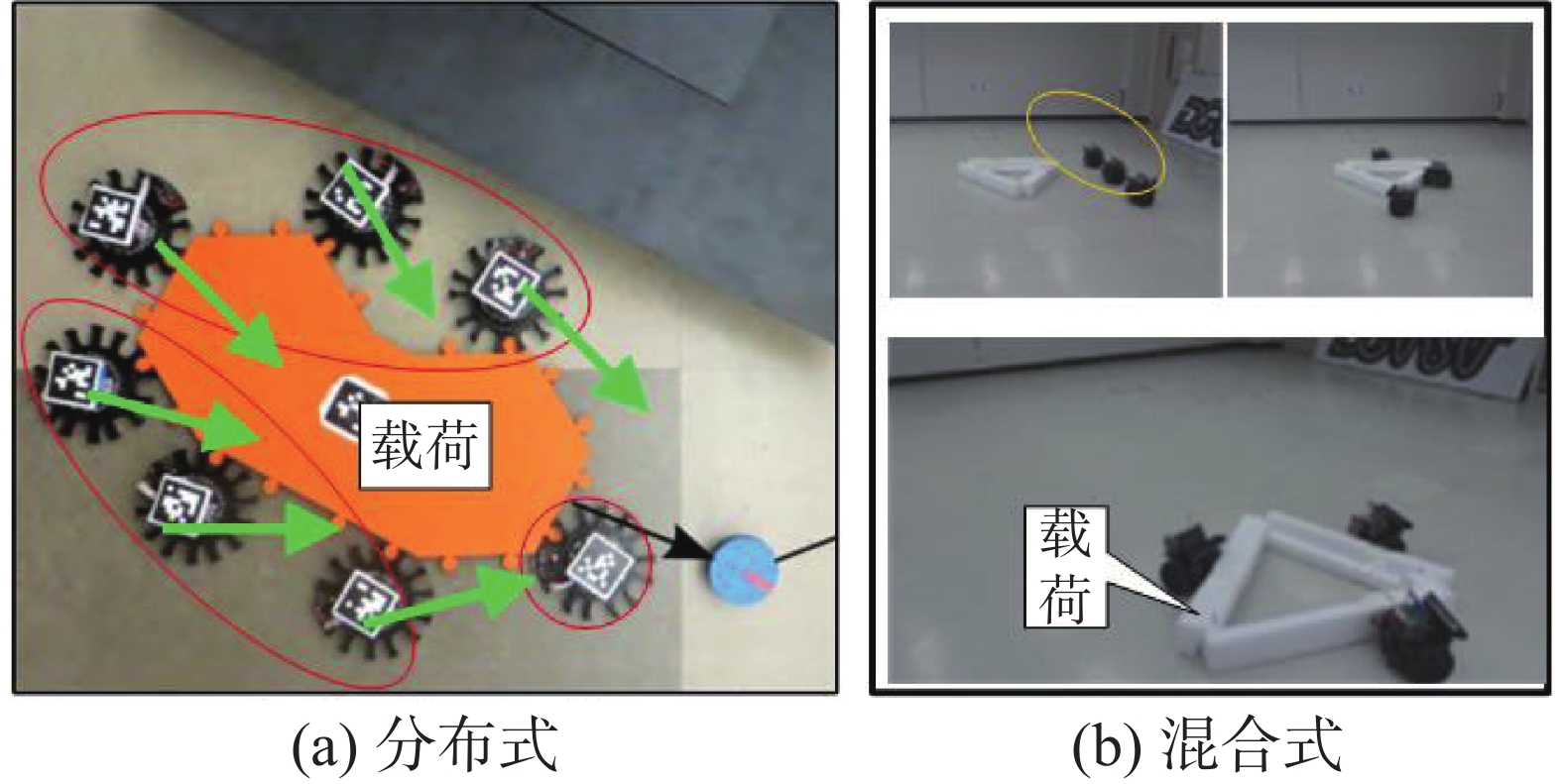 图 8 地面载荷运输的控制架构Fig. 8 Control architecture for ground load transport下载:
全尺寸图片
图 8 地面载荷运输的控制架构Fig. 8 Control architecture for ground load transport下载:
全尺寸图片
地面MRS在载荷运输方面有着广泛的应用,尤其在工业、物流、仓储等领域。这些机器人系统协同工作,共同完成重物的搬运和运输任务,提高生产效率和减少人工负担。但地面MRS的载荷运输方面的应用也存在挑战:1)载荷分配不均,MRS需要合理分配和协调载荷,使得每个机器人负载均衡,方能避免某些机器人负荷过重而影响性能;2)载荷稳定性和安全性较低,运输重物时载荷的稳定性至关重要,以防止载荷滑动或倾斜导致不稳定情况;3)通信协作不够,多机器人之间需确保实时通信,才能够共同协调运输任务,特别是在搬运大型载荷或进行复杂任务时。
2.2 固定机械臂操作
2.2.1 感知能力
面向于固定机械臂操作领域的MRS,通过各种传感技术获取系统所需的状态信息,以便机械臂能够准确感知和解读工作环境如图9所示。视觉传感器是固定多机械臂系统的常用感知组件之一,Navarro-Alarcon等[75]提出一种基于傅里叶变换控制器的多机械臂可变形物体的控制方法,通过视觉传感不断更新软物体的局部形变。Vo等[76]也研究了一种使用立体视觉(stereo vision, SV)的多机械臂系统,以低本立体视觉计算系统确定物体的三维坐标,提高生产线的效能。Navarro-Alarcon等[77]通过视觉反馈系统跟踪被操纵物体的变形,解决机械臂对未知弹性物体的控制问题。Li等[78]提出基于Kinect传感器的多机械臂操作方法,在未知环境中完成对可变形物体的操作。视觉等传感器用于检测待加工物体的信息,而力传感器是感知对物体施加的力,实现对力的控制和力的反馈,实现更精确的操作和交互。He等[79]研究了一种多机械臂的力感知系统,以便在防止在操纵可形变物体是发生滑动。Delgado等[80]研究使用触觉传感器的多机械臂的控制框架,机械臂具有较高的敏捷性且系统具有很强的适应性。2种感知方法的结合,更有利于多机械臂系统安全稳定的执行任务。Kruse等[81]提出一种双机械臂和人协同操作的控制系统,机械臂能够通过关节扭矩传感器进行接触感应,并通过头戴式RGB-D传感器检测褶皱,可变形片材在力和视觉混合控制器下的状态优于单独的力控制器。Higashimori等[82]通过机械臂上的力传感器反馈物体的载荷,用摄像头监测物体的变形情况,有利于减少机械臂的操作时间。当然也存在其他的检测机械臂和物体的传感器方法,He等[83]研究非建模环境中工业冗余机械臂的控制策略,不使用扭矩或力传感器,但在避免障碍时,控制策略根据配备的环境监测传感器测量障碍物的位置并生成同步运动。
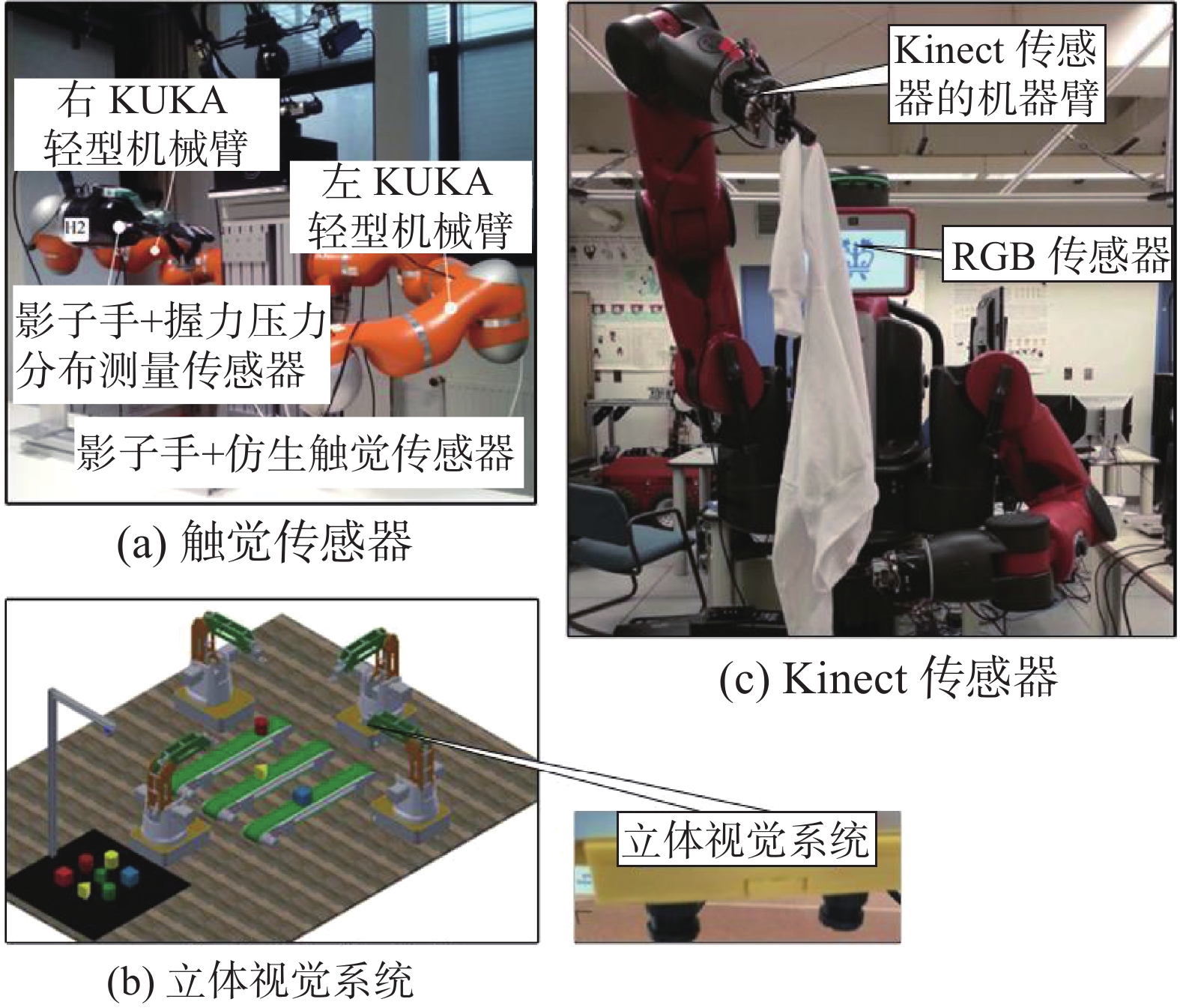 图 9 固定机械臂操作的感知能力Fig. 9 Perception ability of fixed robotic arm operation下载:
全尺寸图片
图 9 固定机械臂操作的感知能力Fig. 9 Perception ability of fixed robotic arm operation下载:
全尺寸图片
2.2.2 控制架构
面向于固定机械臂操作领域的MRS控制架构研究如图10所示,通过各种控制方法实现机械臂的协同工作和任务执行,确保多个机械臂之间高效、安全地完成任务。分布式控制架构需要具备动态规划和实时决策的能力,以应对不同任务需求和环境变化。Di Lillo等[84]提出一种运动冗余度MRS的分布式协调运动控制框架,通过处理不同环境的MRS验证了所提方法的通用性。协同决策并进行路径规划是分布式控制的重要优点,He等[85]提出基于递归神经网络(recurrent neural network,RNN)的多SCARA机器人的分布式协调控制,当实际距离小于设定的安全距离时,防撞策略会做出避免机器臂碰撞的指令,并且能够对机械臂的运动路径进行预测探索。Jin等[86]研究了一种基于非线性激活的容错调零神经网络(nonlinearly-activated noise tolerant zeroing neural network, NANTZNN)的多机械臂分布式运动控制方法,用于解决多个机械臂在存在噪声的情况下的分布式运动规划。Ha等[87]提出多机械臂的分布式运动规划策略,运动过程中机械臂可以进行伸缩,在达到预期位置的过程中避免碰撞。通信与信息交流也是分布式控制架构中重要环节,Liu等[88]提出基于动态神经网络(dynamic neural networks, DNN)的多冗余机械臂的分布式协同控制策略,仅需要相邻机器人之间交换信息,大幅度降低了通信计算负载。集中式或混合式控制方法也在机械臂控制中被采用,Basile等[89]研究面向工件的多机械臂集中式协同运动的方法,使用通用任务公式设计运动规划器,提高工作的安全性和自主性。Peng等[60]研究在人类指导下使用支持向量回归(support vector regression, SVR)估计惯性力的多个双臂机器人集中式控制,机械臂操作负载和尺寸过大的物体,避免滑动。Alonso-Mora等[90]就对多机械臂的混合式控制方法感兴趣,其中集中式方法用于机械臂的全局指导,而分布式局部规划方法保证机械臂在静态和动态障碍物的碰撞避免。
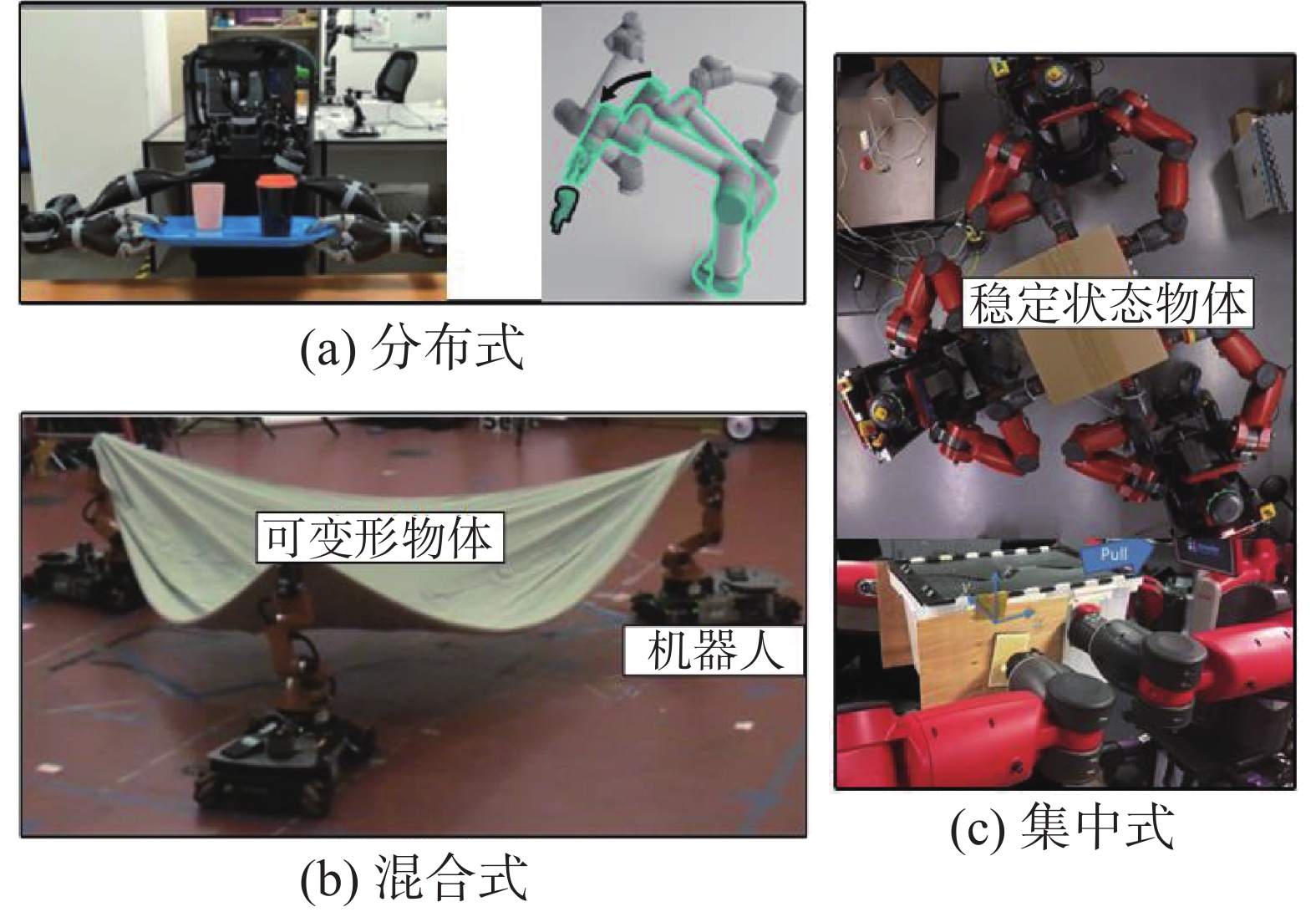 图 10 固定机械臂操作的控制架构Fig. 10 Control architecture for fixed robotic arm operation下载:
全尺寸图片
图 10 固定机械臂操作的控制架构Fig. 10 Control architecture for fixed robotic arm operation下载:
全尺寸图片
固定机械臂是地面MRS中常见应用形式,通常被用于搬运、装配和堆垛等任务。存在问题如下:1)运动规划和碰撞检测不准确,固定机械臂在执行任务时,需要进行空间规划,确保机械臂的运动轨迹不与其他机器人或障碍物相冲突;2)控制和定位精度不高,固定机械臂的控制和定位精度对于执行精确任务至关重要;3)运行的稳定性差,固定机械臂通常需要长时间运行,特别是在工业生产线等场景下,系统运行的稳定性和可靠性是至关重要的。
2.3 自主导航避障
2.3.1 感知能力
面向于自主导航避障领域的MRS感知能力研究如图11所示,旨在引导多机器人自起始点向目标点运动,通过周围环境协同感知避免碰撞。激光传感和视觉感知是常见的感知方式,能够测量周围环境的距离和形状,地面多机器人通过激光传感器或摄像头获取环境的数据,实时检测障碍物的位置和距离以便规划避障路径。Lin等[91]研究了基于深度强化学习的MRS的导航避障方法,将原始激光雷达测量值直接反馈到控制中心。Fu等[92]提出仅使用激光雷达和摄像头等传感器测量局部信息的多机器人导航防撞策略,加强非完整机器人编队在局部信息下的导航避障能力。Chen等[93]提出使用二维激光雷达的MRS导航避障方法,提高无地图环境下的编队控制稳定性。Ravankar等[58]提出基于视觉伺服辅助的MRS的导航避障方法,高效完成导航避障并节省能耗。Cognetti等[94]提出由一个配备摄像头的无人机领导地面无人车辆的异构控制方案,通过IMU和测距传感器感知车辆和无人机之间的距离,增强编队的导航避障能力。同样Pandey等[95]通过配备的红外测距传感器收集环境中障碍物的信息,提升机器人在动态障碍物中的避障灵活性。而Wang等[96]提出搭配机载噪声传感器的MRS导航防撞策略,仅使用噪声对邻居机器人进行位置测量,在感知不确定时机器人的碰撞风险更低。
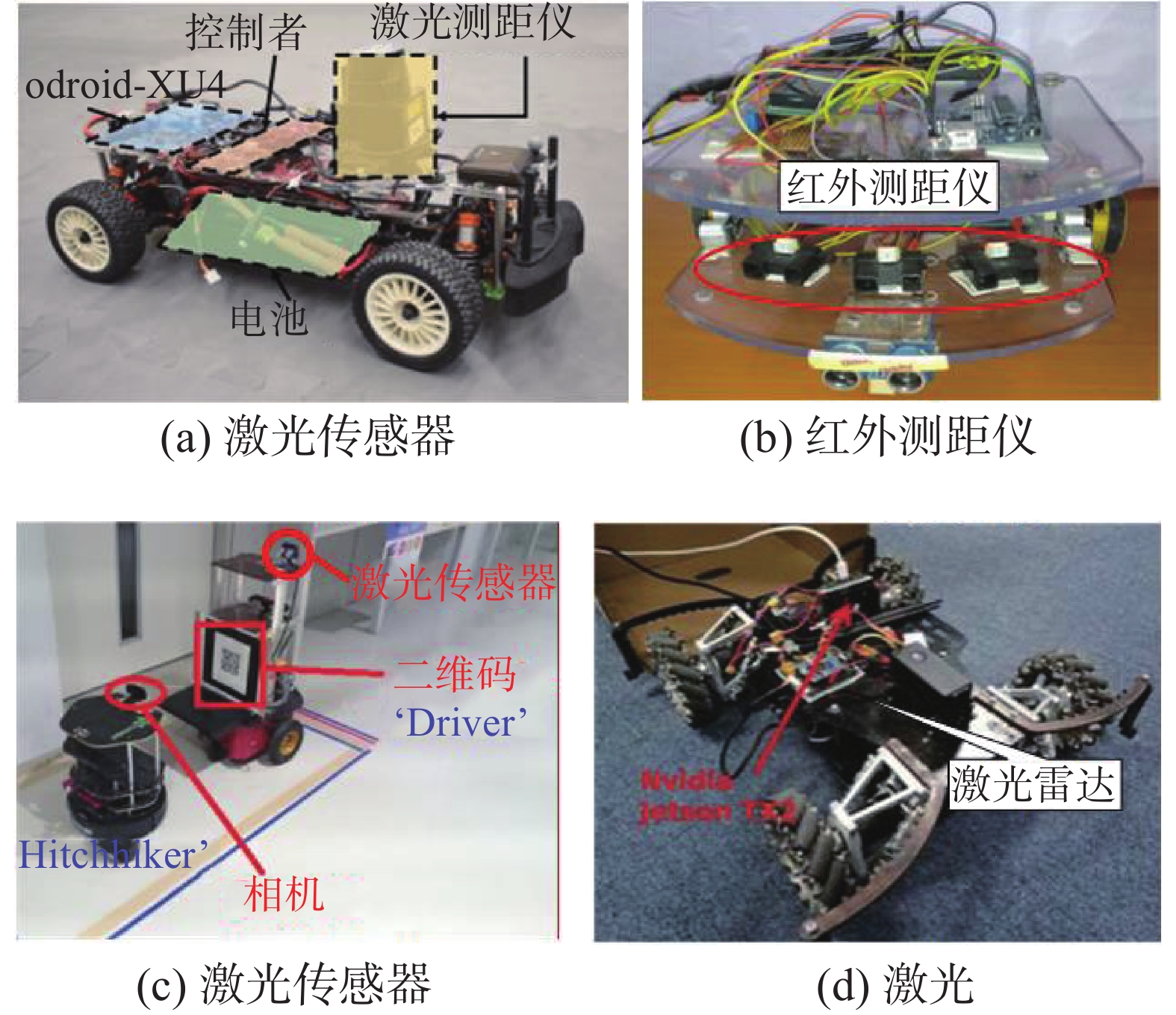 图 11 自主导航避障的感知能力Fig. 11 Perception ability for autonomous navigation obstacle avoidance下载:
全尺寸图片
图 11 自主导航避障的感知能力Fig. 11 Perception ability for autonomous navigation obstacle avoidance下载:
全尺寸图片
2.3.2 控制架构
面向于自主导航避障领域的MRS,其控制架构也主要分为分布式和集中式2类,如图12所示。分布式控制下系统具有良好的导航避障能力。Chen等[97]研究基于地图的深度强化学习(deep reinforcement learning,DRL)的多机器人分布式导航避障,由机器人为中心的局部网格图展示周围的环境信息,使得机器人在无通信环境中安全有效地避开障碍物。Han等[98]研究了在交互式障碍物中多机器人的分布式导航避障,再结合互易速度障碍(reciprocal velocity obstacle, RVO)和深度强化学习的方法,有效地解决在有限信息下障碍物的碰撞。Fu等[99]提出了速度和输入约束的二阶多机器人编队的分布式导航避障问题,仅需局部感知信息就能实现碰撞避免和连接维护。Zhai等[100]提出了有限通行条件下多机器人的分布式导航避障、防撞框架。Zhu等[101]研究基于不确定性感知Voronoi单元的MRS的分布式导航避障,该方法可以提高非完整机器人在定位不确定性和无通信条件下的碰撞避免能力。集中式控制架构具有全局规划和决策的优势,能够在复杂环境中实现统一的导航和避障,Bai等[57]提出了基于深度强化学习与领导者–跟随者编队相结合的多机器人编队自适应集中式控制,使MRS能够适应不同类型障碍物场景。Balch等[102]最早将行为控制方法用于编队控制,通过多传感信息融合实现环境和机载状态感知,实现MRS的集中式控制,使用该方法能够实现导航避障。混合式控制架构兼顾了集中式控制和分布式控制的优势,适用于一些复杂任务场景。Zhou等[103]提出一种三维目标检测模型和预测控制器结合的MRS的混合避障方法,提高了实时导航过程中的避障率。Hacene等[104]研究未知混杂动态环境下多移动机器人自主导航的混合式控制,仅需激光传感器连续测量动态U形障碍物和墙壁的信息,提高动态壁障能力。Chinnaiah等[105]采用了集中式为主的多机器人导航控制架构,所提出的算法消耗更低的功率,弥补了集中式和分布式方法在多机器人导航应用之间的差距。
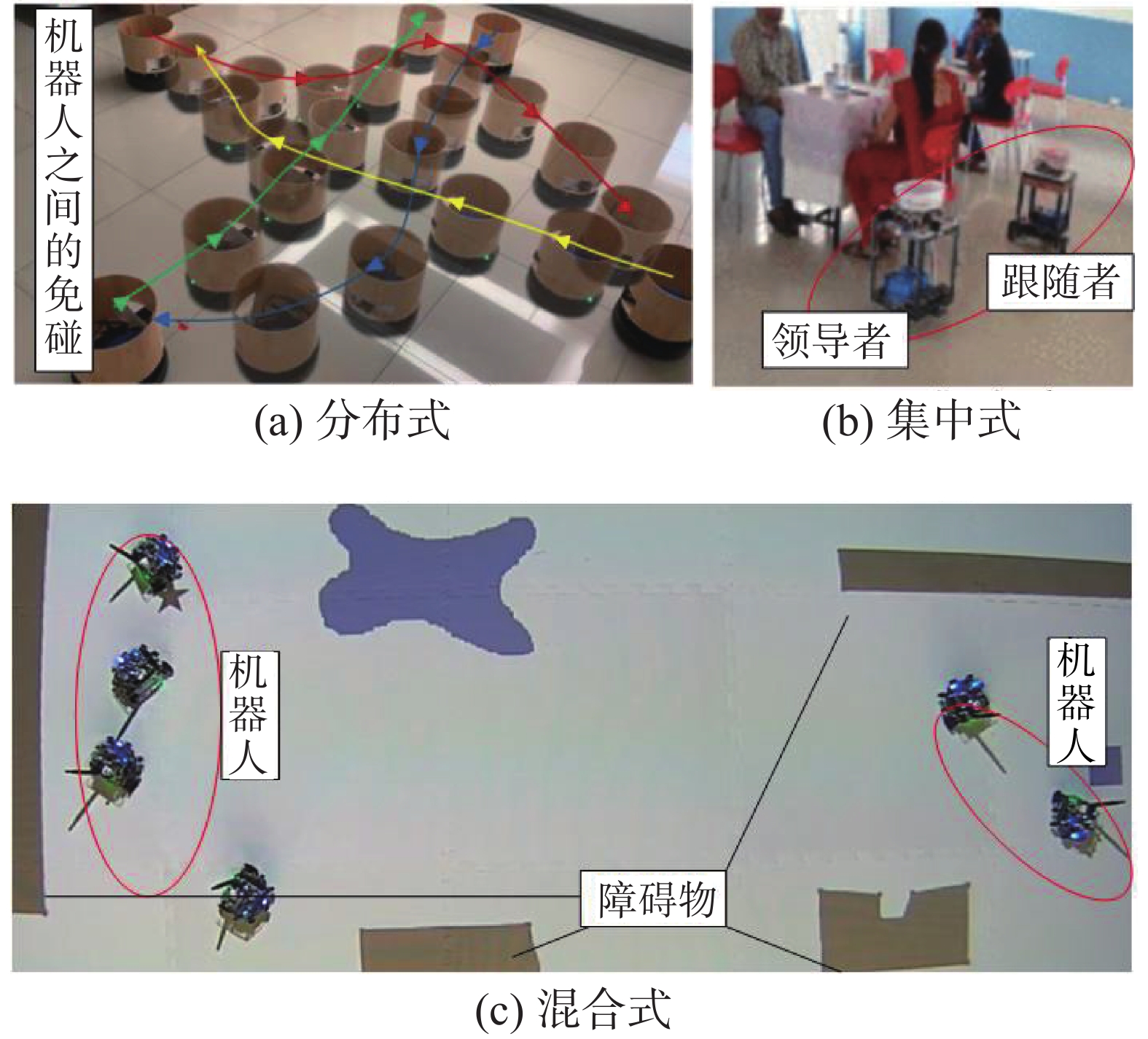 图 12 自主导航避障的控制架构Fig. 12 Control architecture for autonomous navigation and obstacle avoidance下载:
全尺寸图片
图 12 自主导航避障的控制架构Fig. 12 Control architecture for autonomous navigation and obstacle avoidance下载:
全尺寸图片
MRS自主导航避障过程中也存在如下研究难点:1)感知和探测能力差,机器人需要配备多种传感器,如激光雷达、摄像头、超声波传感器等,以便感知和探测周围环境;2)避障算法不稳定,机器人在移动过程中需要实时检测障碍物并避开;3)基于模型的控制研究不深,对于一些复杂机器人系统采用基于模型的控制方法,建立动力学和运动模型,并结合反馈控制能实现精确的导航和避障;4)实时性较差,机器人系统在实时环境中运行,对计算效率和响应速度提出较高要求。
2.4 环境搜索勘探
2.4.1 感知能力
面向环境搜索勘探领域如图13所示,MRS感知能力研究是研究重点方向之一。
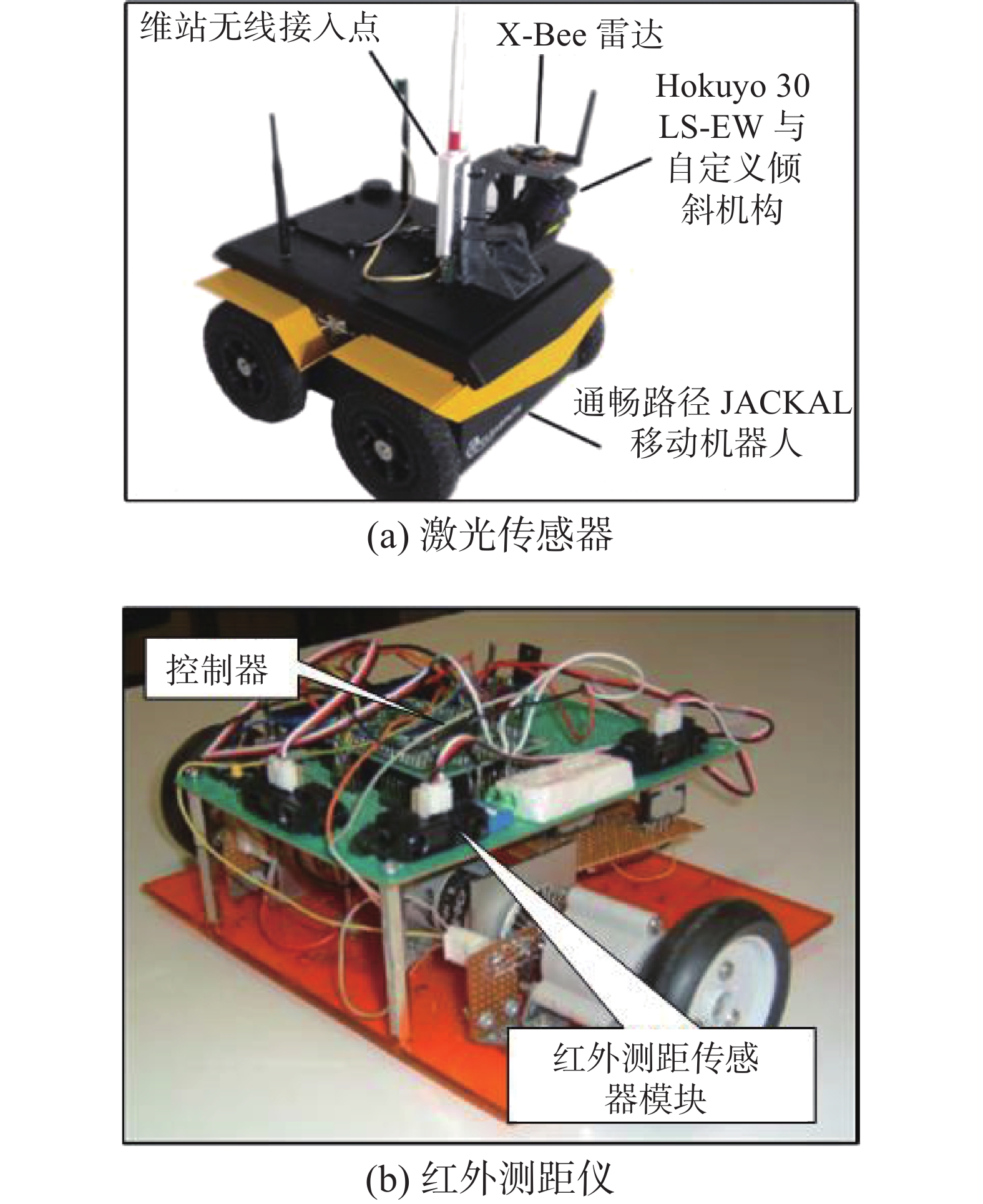 图 13 环境搜索勘探的感知能力Fig. 13 Perception ability of environmental search and exploration下载:
全尺寸图片
图 13 环境搜索勘探的感知能力Fig. 13 Perception ability of environmental search and exploration下载:
全尺寸图片
激光、视觉或测距传感器是在环境搜索探勘中常用的感知手段,获取实时图像或点云数据,用于测量周围环境的距离和形状。Wang等[106]提出使用激光扫描仪的MRS的未知环境搜索,根据反馈的信息优化了在未知环境中的搜索能力,降低了机器人之间的信息交换量。Dube等[107]提出使用3D激光雷达进行定位和映射的多机器人的协作搜索,3D激光雷达能够更加精准地反应环境的信息。Luo等[52]则认为提出异构机器人团队在未知环境中的搜索策略,无人机使用测距仪和摄像机监测携带测绘传感器和定位传感器的地面机器人的勘探区域,另外2辆带有声纳、指南针和彩色传感器的微型地面车辆作为后备队。Yasuda[108]探讨了基于嵌入式Petri网模型的MRS的协同搜索问题,通过多个红外测距传感器对环境进行感知。Anderson等[53]通过局部LED测距仪和扫描仪的信息识别,即可实现多机器人协同目标搜索功能,提高在未知环境的探索能力。而Corah等[109]则提出基于高斯混合模型(gaussian mixture model,GMM)的MRS探勘搜索方法,保证大型环境下搜索效率和完整性的同时,降低通信速率。Fung等[110]提出一种信息率自适应采样方法的多机器人系统,减少了雷达等传感器对房屋的重叠搜索,有效地提高了探测环境的效率。
2.4.2 控制架构
面向于环境搜索勘探领域的MRS控制架构研究,重点在于如何利用不同的控制架构增强MRS协同搜索勘探未知环境的能力,如图14所示。在环境搜索任务中分布式控制架构更具灵活性、适应性和容错性,有效提高搜索效率。Hu等[111]提出基于Voronoi的多机器人分布式搜索策略,通过将不同目标位置分配给机器人来减少区域的重复勘探,降低了任务的完成时间和能源消耗。Tang等[112]提出了一种基于灰狼优化器(grey wolf optimizer,GWO)的MRS的分布式协作搜索方法,该方法提高了机器人的运动速度和局部搜索精度。Li等[113]提出一种基于概率有限状态机(probable finite state automation,PFSA)的多机分布式搜索策略,该方法可以提高多机器人的多目标搜索效率。Kabir等[114]提出一种基于最优运输(optimal transport, OT)的MRS的分布式协同探索策略,使得搜索效率更加高效。Jia等[115]研究一种基于人工势场的群体机器人的分布式控制,增强了机器人在任意覆盖凸多边形区域中的搜索能力。Geng等[116]提出一种基于注意力的通信神经网络(artificial neural networks, ANNs)的MRS的分布式协作搜索方法,通过机器学习做出决策使得机器人在动态环境的搜索过程中无缝协作。虽然分布式控制架构是主流,但集中式控制架构具有全局决策和协调的优势,适用于高度协作和统一规划的任务场景。Ristic等[117]研究了基于湍流环境搜索算法的多机集中式控制策略,搜索到目标排放源的成功率为100%。
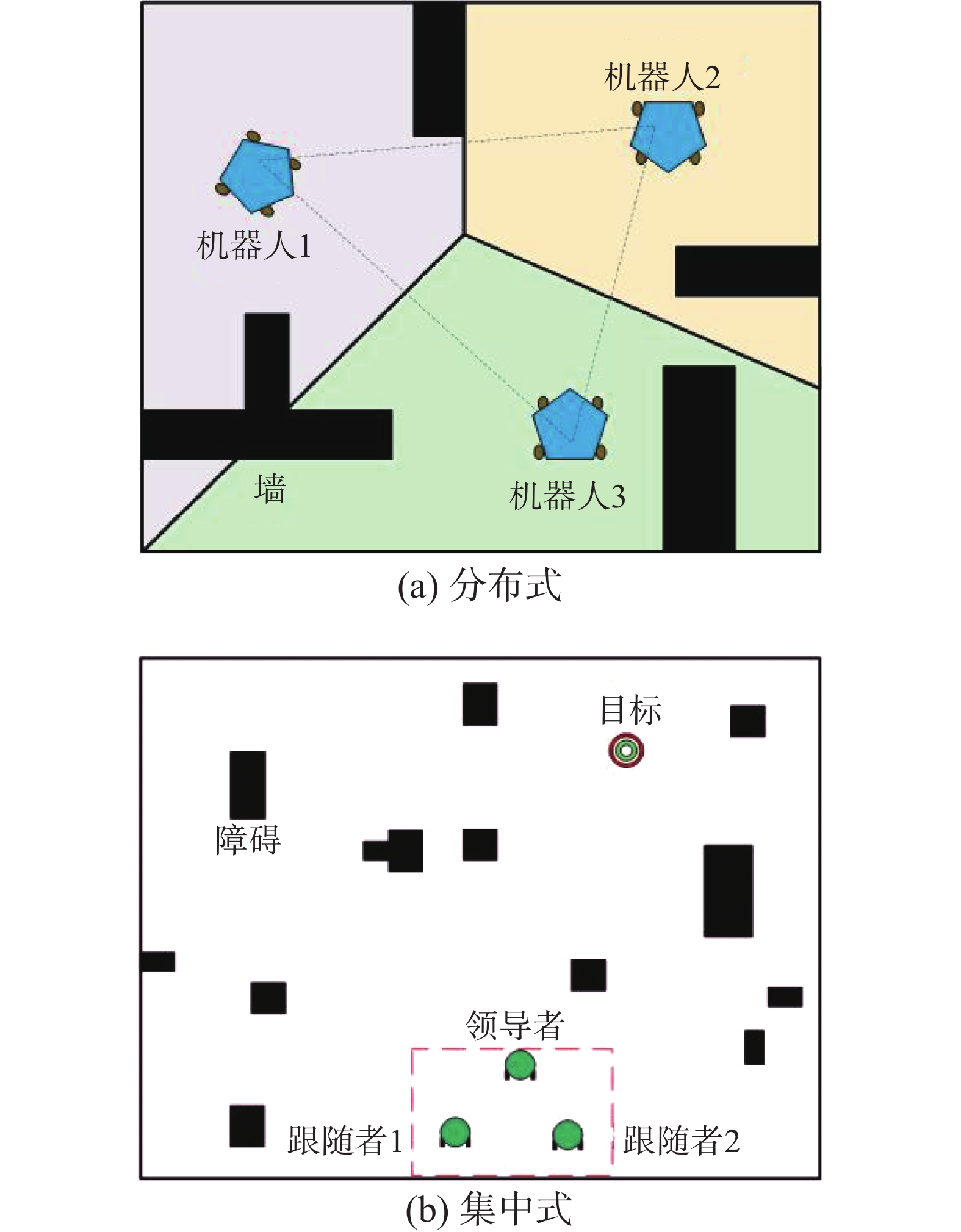 图 14 环境搜索勘探的控制架构Fig. 14 Control architecture for environmental search exploration下载:
全尺寸图片
图 14 环境搜索勘探的控制架构Fig. 14 Control architecture for environmental search exploration下载:
全尺寸图片
地面MRS在环境搜索勘探方面有着广泛的应用,特别是在搜救、勘测、探险等领域。这涉及到多个机器人在未知危险环境中协同工作,以发现目标或获取有价值的信息。以下是关于地面MRS在环境搜索中可能遇到的问题:1)探索勘探策略混乱,在未知或者危险环境中,多机器人需要制定有效策略,以高效地覆盖整个搜索区域;2)信息融合度差,在探索过程中由传感器产生大量数据,需要对这些数据进行融合,以生成全局环境地图;3)资源分配不合理,在环境搜索勘探任务中,机器人需要保持长时间运转,能源管理是一个重要问题;4)决策能力不足,机器人可能面临缺乏指令或无法直接通信的情况,要具备根据环境和任务做出适应性决策的能力。
3. 水面MRS
水面MRS与空中和地面MRS相比较,其协同控制和感知能力存在更多约束。但水面MRS的运用也十分广泛如表3所示,如远洋运输、水面动态或静态目标跟踪、河流或湖泊垃圾清理等。
表 3 水面MRS的主要应用分类Table 3 Main application classification of surface MRS文章 应用场景 控制框架 传感能力 Wang等[118] 目标跟踪 分布式控制 机载传感器(3D激光雷达、IMU和摄像头) Chen等[119] 免碰避障 分布式控制 雷达、激光测距仪、测声纳、多波束前视声纳和其他设备观测水面或水下环境 Farinelli等[120] 免碰避障 集中式控制 声学多普勒电流传感器感知的信息 Liu等[121] 免碰避障 混合式控制 由4个毫米波雷达测量速度和距离,陀螺罗盘用于获取航向和姿态数据 Moulton等[122] 环境监测 分布式控制 3D侧扫成像传感器、激光雷达、GPS、立体相机和单眼相机收集信息 Charalambopoulos等[123] 导航移动 集中式控制 根据各种机载传感器反馈的环境信息 Yang等[124] 巡航救援 分布式控制 结合全球导航卫星系统(global navigation satellite system,GNSS)、声纳和无线电通信感知环境 3.1 感知能力
面向于水面MRS感知能力的研究是指多个机器人在水面环境中获取和理解信息的能力,如图15所示。通常来说船舶在造价比较昂贵,因此针对传感系统选型对环境与障碍物分布情况的感知效果具有重要影响。激光和视觉类传感器是船舶重要的传感方式,用于水面或水下目标的环境感知。Hong等[125]提出在复杂环境下使用摄像头的多船舶检测与跟踪策略,提升跟踪的精准度和实时性。Fefilatyev等[126]研究了公海视觉船舶检测和跟踪算法,专门用于处理来自高度非静止的图像数据,实现检测精度88%,水平检测和定位精度达到99%。雷达是水面多机器人感知环境的主要手段之一,可以测量目标与雷达的距离、速度和方向等信息。Liu等[121]基于毫米波雷达(millimeter wave, MW)设计了一种用于船舶编队的船闸航道检测方案,提高安全避障能力。Almeida等[127]考虑洋流和参数模型不确定性,在二维空间中进行嵌入式补偿的全驱动多水面船舶的非线性控制方法,由全球定位系统(global positioning system,GPS)测量舰艇位置和线速度,提高跟踪控制能力。Zhang等[128]研究了基于合成孔径雷达(synthetic aperture radar, SAR)图像的多船舶目标跟踪算法,对具有复杂干扰的目标依旧实现鲁棒跟踪。由于任务和环境的复杂性,多传感信息的融合也是常用手段。Hu等[129]则研究了通过船舶自动识别系统(automatic identification system, AIS)等传感器实时获取船舶速度、航向、位置和相对运动参数等数据的多船避障策略,此方法根据船舶的实时状态信息为值班人员提供预警和决策支持。Chen等[119]研究了基于任务序列遗传蚁群混合算法(genetic ant colony hybrid algorithm,GACHA)的多船舶控制策略,根据舰艇的雷达、激光测距仪、测声纳、多波束前视声纳和其他设备观测水面或水下环境,避免静态障碍物的碰撞。Xiong等[130]研究了基于多传感器数据融合的多船目标跟踪策略,方法优于单个超声波传感器测量精度,提高了船舶目标跟踪精度。Wang等[118]研究基于非线性模型预测控制(nonlinear model predictive control, NMPC)的动模块化结构的多连接水面舰艇控制策略,仅需领导机器人轨迹、方向和各机器人姿态、速度和加速度的局部信息,即可实现目标的跟踪控制。深度学习技术也成为多机感知能力的策略之一,通过深度学习算法进行物体检测、识别和跟踪,从而准确感知周围环境。Zheng等[131]则是使用深度神经网络(deep neural networks,DNN)感知多船舶在导航过程中的环境信息,提高了多船舶在开阔水域避免碰撞的性能。船舶不仅可以作为已知信息的执行者,也可以被当做测量工具,Nielsen等[132]就提出一种使用多艘船作为海浪浮标的测量方法,可用于预给定地理位置的位置海况。Cui等[133]研究在合成孔径雷达中基于密集注意力金字塔网络的多船舶检测方案,提高SAR图像在不同场景中多尺度船舶的检测精度。
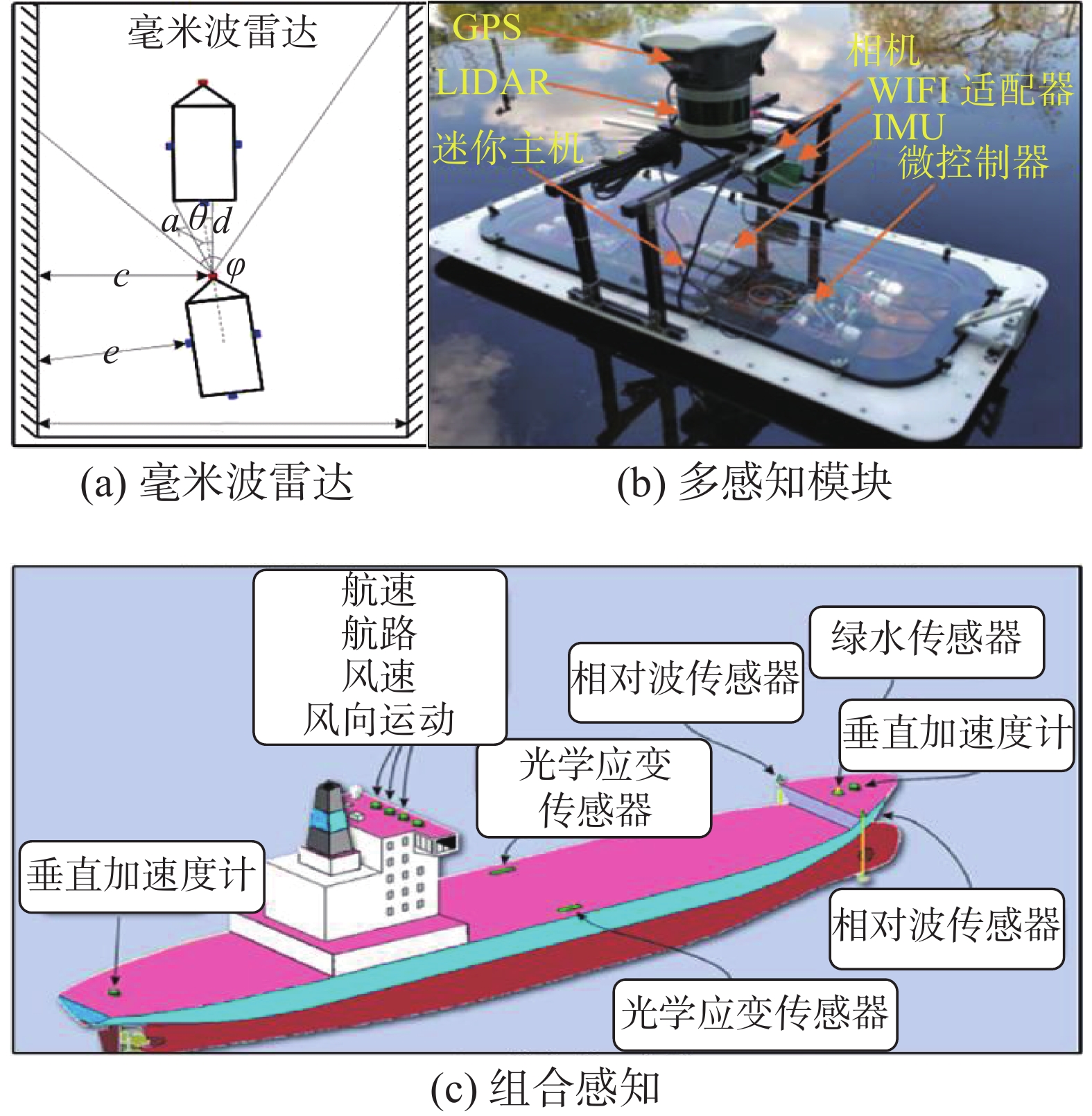 图 15 水面MRS的感知能力Fig. 15 Perception ability of surface multi robot systems下载:
全尺寸图片
图 15 水面MRS的感知能力Fig. 15 Perception ability of surface multi robot systems下载:
全尺寸图片
3.2 控制架构
面向于水面MRS的相关研究如图16所示,很多集中于水面船舶的控制方面,尤其分析分布式控制和集中式控制对船舶避障能力的影响。Li等[134]提出一种多船舶防撞的分布式协调控制策略,每艘船舶通过点对点的通信寻找最优防撞解决方案,降低计算负担和对单个协调器或控制器的依赖。Do[135]研究了一种多艘欠驱动船舶运动的分布式控制器设计,保证船舶在海上载荷下的同步跟踪运动,并且不会发生碰撞。Zhang等[136]研究了多舰艇相遇时的分布式防撞策略,在狭窄繁忙的水域中,艘船在遭遇时根据附近船只的动态做出最有效的防撞方法。Do[137]设计一种多艘欠驱动船舶编队的分布式协作控制器,在船舶摇滚轴上没有独立的致动器,每艘船舶通过扰动观测器(disturbance observer,DOB)解决有限感知范围内的防撞问题。Wang等[138]研究基于迭代观测与推理的多船舶分布式避碰控制策略,每艘船都从保护自身的角度思考方案,可以有效地预测船舶的动态。Wang等[139]研究了基于虚拟场力 (virtual force field, VFF)的多船舶分布式模型预测控制方案,在多船舶碰撞策略下所研究的方法具有良好的工作性能。而Liu等[140]则提出了一种基于新的约束快速行进算法(fast marching method,FMM)的多无人水面舰艇编队集中式控制,通过随动器检测距离误差,约束快速行进方法的计算时间更短,避障能力更强。Farinelli等[120]也研究基于有色Petri团队态势感知与混合主动的佩特里网框架的多舰艇集中式控制,把声学多普勒电流(acoustic doppler current profiler,ADCP)传感器感知的信息通过边缘映射到控制器,操作员在3种中断团队导向干预后可以继续执行任务,减轻危险、狭窄海域的碰撞情况。在分布式控制下,如果多台机器人同时发现目标或有冲突的任务需求,它们可以通过通信进行协商,避免重复工作或冲突。Bruzzone等[141]提出在紧急船舶拖曳场景下海洋机器人的自适应分布式控制,基于线跟踪和圆跟踪技术开发的自主虚拟目标路径跟踪制导系统结合摄像头反馈的周围环境,为机器人的运动提供协作和协调能力。Liu等[142]针对无人船多传感器噪声的影响问题,提出一种基于卡尔曼滤波的无人船编队的分布式定位方案,每艘无人船都有固定的跟踪目标,不会发生跟踪错误。分布式控制架构具有较高的灵活性,能够应对复杂和动态的环境,Li等[143]提出基于平流扩散方程(advection-diffusion equation, ADE)模拟分布式和可扩展的多机器人分布式控制跟踪,避免了在静态水位污染跟踪过程中由于不确定性或传感器噪声引发的漂移问题。Sun等[144]针对海洋通信不可靠、通行成本高等问题,研究了一种基于滑模控制和神经网络的多船舶分布式控制策略,以极低的成本解决了恶劣海洋环境下的通信问题。也有学者从能源消耗的角度对分布式控制架构下的多无人船系统进行了研究,Sun等[145]研究了一种有限传感范围内的多船舶的分布式控制策略,分布式控制器在目标跟踪区域内具有更好的性能和更低的能源消耗。Wang等[146]提出一种采用双层模型预测控制策略的多舰艇分布式动态优化方法,可以降低船舶能耗和二氧化碳排放量。Ross等[147]采用了分布式架构对水上、水面和水下组成的异构多机器人进行协调控制,形成跨多个领域的机器人的协同工作,以便掌控浮动目标的运动状态。
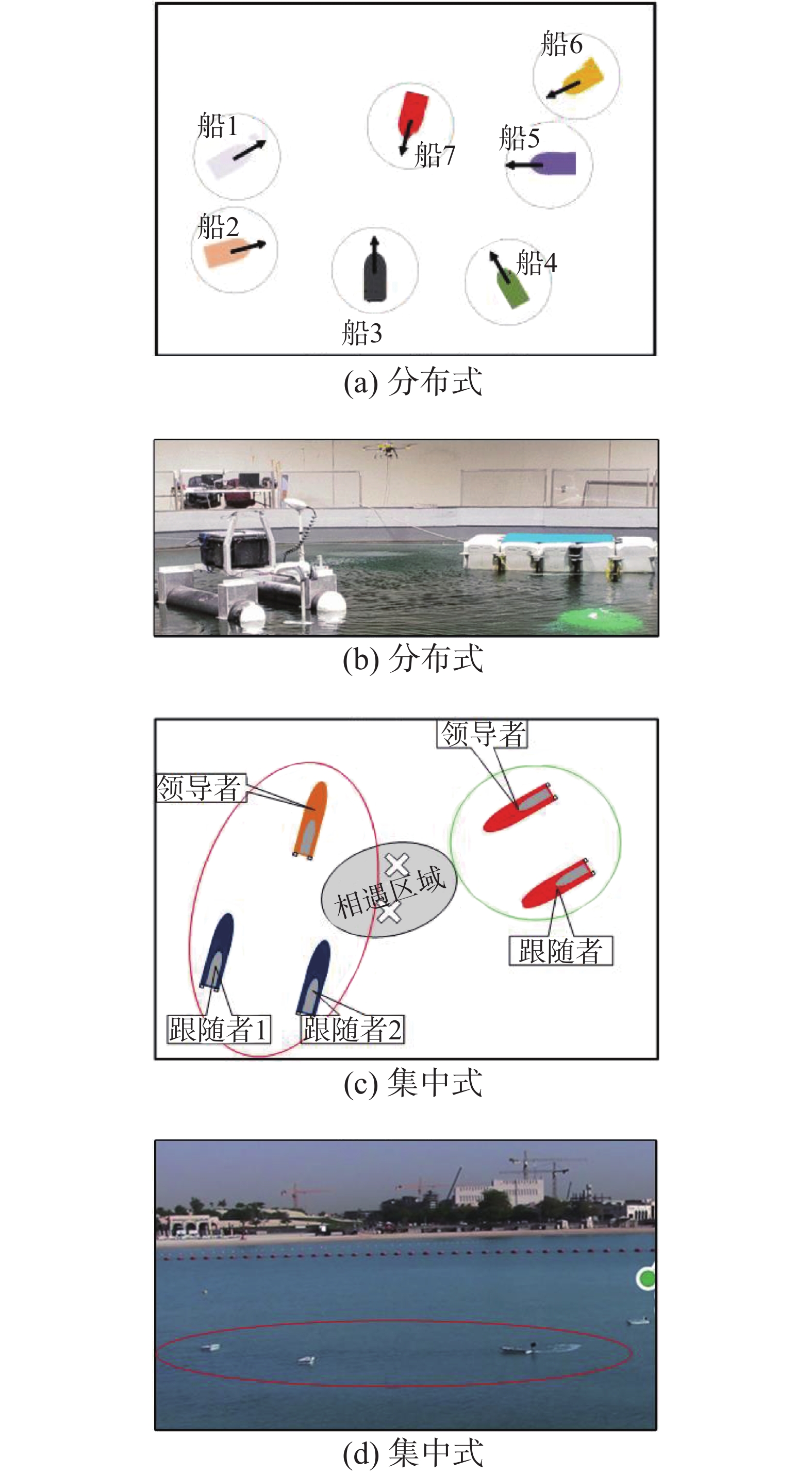 图 16 水面MRS的控制架构Fig. 16 Control architecture of water surface multi robot system下载:
全尺寸图片
图 16 水面MRS的控制架构Fig. 16 Control architecture of water surface multi robot system下载:
全尺寸图片
水面MRS涉及到感知能力和控制架构的问题更加复杂,因为水面环境相较于陆地环境具有一定的特殊性和挑战性(如洋流、水应力、风雨等)。在感知能力方面涉及的问题主要包括如何进行水面感知以及如何进行有效的数据融合,提高环境感知的准确性。在控制架构方面涉及问题包括:1)水面自主导航,系统需要具备自主导航能力,能够在水面避开障碍物;2)通信和协同控制,机器人之间要保持实时通信,进行协同控制和任务分配;3)资源管理,需要合理的能源管理策略,以保证系统的持续工作时间和任务完成能力。
4. 水下MRS
水下MRS是一种代替人类在高度危险环境、被污染环境、零可见度的水域下长时间工作的极限作业机器人。水下MRS的工作领域主要包括:水中物体的打捞、海洋生物的目标跟踪、未知环境的勘探搜索等如表4所示。
表 4 地面MRS的主要应用分类Table 4 Main application classification of ground multi robot systems4.1 感知能力
面向于下面多机器系统感知能力的研究,集中于MRS如何通过机载传感器搜集当前的水下环境或自身运动状态信息如图17所示。基于视觉或者或激光雷达成像的感知方法是水下多机器人重要感知手段,可以获取实时图像或数据。Botelho等[154]研究了一种增强状态卡尔曼滤波器的多水下自主机器人的协调定位方法,可以高效探索海底。He等[155]提出TOF相机和微机电传感信息融合算法的水下球形多机器人的环境搜索方法,基于卡尔曼滤波模型最小化TOF相机定位误差。水下多机器人通常配备声纳传感器,用于水下目标探测、障碍物躲避和海底地形测绘等任务。Wang等[156]则利用声呐进行勘探,提出基于协同定位粒子滤波(cooperative localization particle filter,CLPF)方案和网格格映射算法(occupancy grid mapping algorithm,OGMA)的水下机器人的协调控制,通过压力和声呐融合传感信息,实现目标搜索与勘探。Harbin等[157]运用集体智能算法优化声呐传感信息感知能力,完成在海底的障碍物躲避。在水下环境中多普勒计程仪(doppler velocity lof, DVL)也是常用的传感设备,用于测量水下载体(如水下机器人、潜水器、潜艇等)相对于水体的速度。Paull等[158]研究基于相互通信和测量的全轨迹协调控制,仅适用罗盘和DVL传感器直接测量位置。Medagoda等[152]提出基于声学多普勒海流剖面仪辅助定位算法的AUV中水柱定位方法,实现机器人在完成搜索任务的精确定位。多机器人的协同感知更有利于机器人系统感知环境变化和任务需求,以便更好地执行任务。Feng等[148]针对不确定扰动下水下机器人编队的时变跟踪控制问题,通过水声定位与压力计、IMU等数据进行AUV的速度监测。Shi等[149]基于视觉系统、MEMS传感器和深度传感模块跟踪目标。Cui等[159]则是仅通过IMU和视觉定位系统测量机器人的方位和位置,而不测量线速度和角速度,使水下机器人具有良好的跟踪性能。
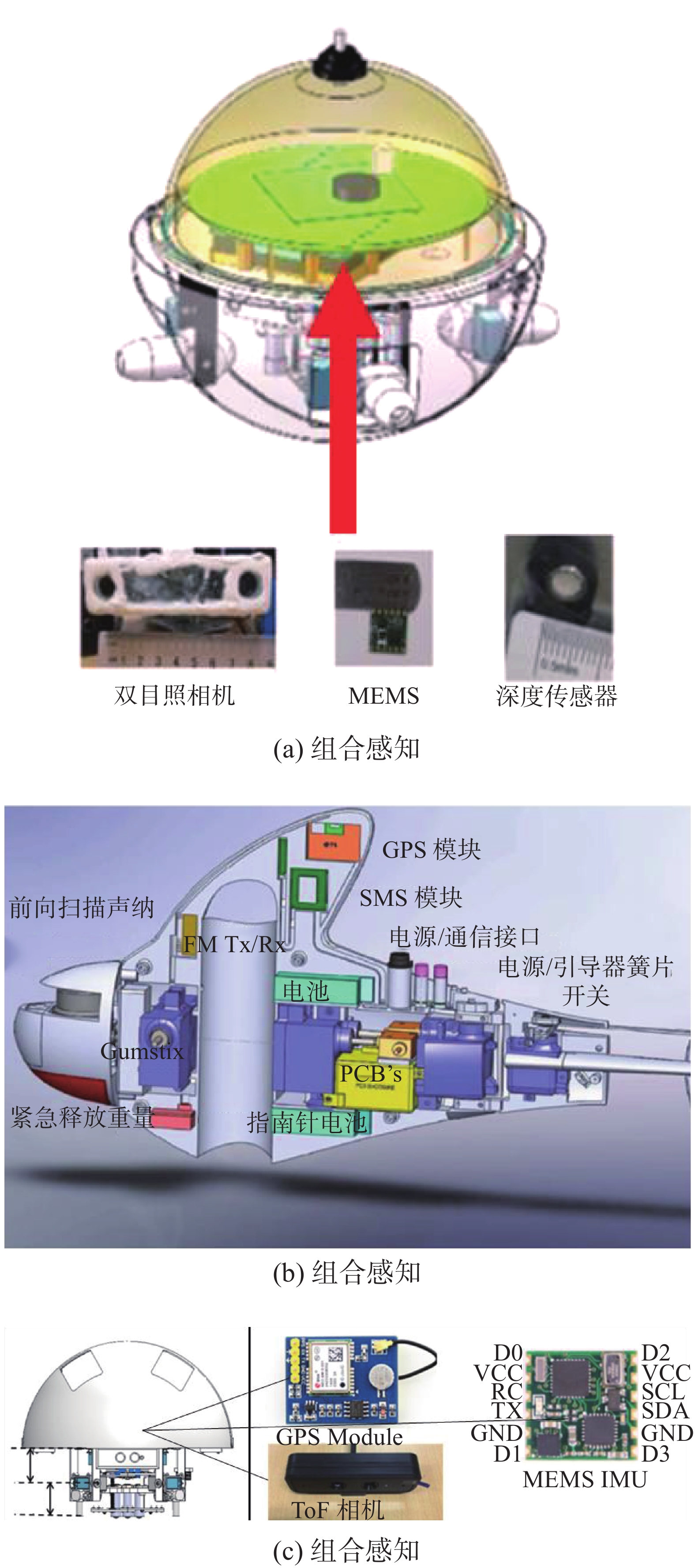 图 17 水下MRS的感知能力Fig. 17 Perception ability of underwater multi robot systems下载:
全尺寸图片
图 17 水下MRS的感知能力Fig. 17 Perception ability of underwater multi robot systems下载:
全尺寸图片
4.2 控制架构
面向于水下多机器系统控制架构分类如图18所示,也分为分布式、集中式和混合式。在分布式控制下每个机器人都具有一定的感知和决策能力,并能其他机器人进行信息共享,以实现全局任务规划和协调。分布式控制架构良好的灵活性,在复杂和动态的水下环境中(通信受限、干扰性强等),机器人可以根据任务需求和环境变化,灵活地调整自身的行动和决策,继续协同工作完成任务。Halsted等[160]则是提出基于欧几里得距离矩阵(euclidean distance matrices, EDMs)测量距离的多机器人分布式定位策略,仅从机器人发送和接受声脉冲进行位置定位,对传感和通信的要求很低,主要用于通信受限、通信不可靠和不可用的环境。Guo等[161]利用远距离无线电(long range radio, LoRa)通信技术和区块链技术提出分布式球形多机器人控制系统,提高了系统的拜占庭容错(byzantine fault tolerance, BFT)能力,具有低功耗、远距离通信、高抗干扰的特点。Liu等[162]提出针对机器人受到非线性、参数不确定性和外部干扰的影响,提出一种鲁棒分布式编队控制方案,由位置环和姿态环控制机器人的平移运动和旋转运动。Rathnam等[163]研究在有限通信范围内多机器人的分布式搜索策略,在保证通信的情况,最大程度的提高探索性能。同样在分布式控制下,机器人能够提高协同决策和任务规划能力,避免重复工作或冲突,提高执行任务的效率。Hollinger等[164]研究利用有效共享信息的多机器人的分布式协调算法,通过数据融合技术可以避免信息重复计算,从而提高多机器人的探索性能。Jia等[165]提出了基于初始目标信息预测的水下多机器人的分布式协同搜索控制系统,在有限能量下,该方法有效地减少了搜索时间,提高了搜索目标的概率。Peng等[166]研究了具有时变参考轨迹的基于预测神经网络的多自主水下机器人分布式控制跟踪,局部预测器可以快速识别每个机器人的未知动态。相反集中式控制由一个中央控制器收集处理信息,负责指挥和协调整个编队的行动。Sun等[167]就提出一种基于Glasius仿生神经网络(glasius bio-inspired neural network, GBNN)算法的水下多机器人全覆盖路规划方法,集中处理单元能够规划出合理且无碰撞的编队路径,提高任务执行效率,减少路径规划时间。Gu等[168]提出了多球形水下机器人的集中控制策略,使得通信系统更具准确性、有效性和及时性,领导者根据基站信息进行运动避障,跟随者模仿领导者轨迹运动完成避障。Jia等[169]提出一种运用集中式控制方法的水下多机器人的半圆和圆形包围的协同追踪策略,在较远距时以最大速度移动,大幅度的减少了追踪的时间,且能够到达突袭的目的。当然水下多机器人的混合式控方法也是研究热点,混合式控制架构兼顾了集中式控制和分布式控制的优势,适用于一些复杂任务场景。Pham等[150]研究用于多架低成本水下无人机的混合式控制,采用集中式方法的分布式架构,提高编队跟踪是机器人之间距离的准确性。
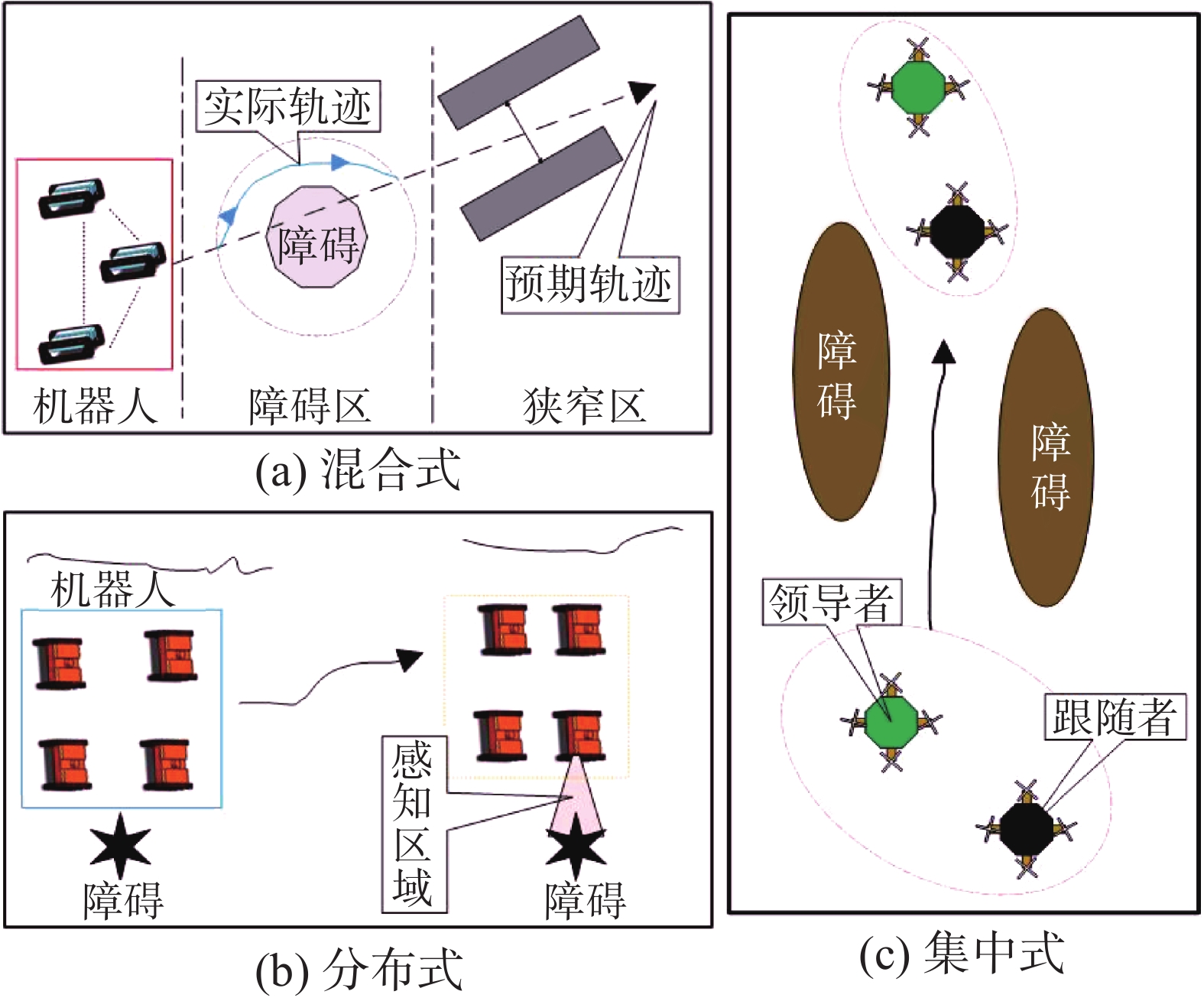 图 18 水下MRS的控制架构Fig. 18 Control architecture of underwater multi robot system下载:
全尺寸图片
图 18 水下MRS的控制架构Fig. 18 Control architecture of underwater multi robot system下载:
全尺寸图片
水下MRS在感知能力和控制架构方面面临一些特殊的挑战和问题。由于水下环境的复杂性和不可见性,水下MRS需要具备高度智能化的感知和控制能力。感知能力问题包括:1)水下环境感知,需要配备各种传感器,以感知水下环境的地形、水流、目标物体等信息;2)水下通信,通信受限于水的传播特性,传输速率较慢且受干扰;3)多传感器数据融合,各种传感器数据需要进行融合和处理,以提供准确的环境信息。控制架构问题包括:1)自主导航能力,在复杂的水下环境中系统需要具备良好的自主导航能力,以便规划路径、避开障碍物;2)通信和协同控制,通过实时通信,进行协同控制和任务分配,提高整体性能;3)能源管理,需要合理的能源管理策略,以保证系统的持续工作时间和任务完成能力;4)实时性和计算效率,由于实时环境变化和任务指令,对计算效率和响应速度提出较高要求。
5. 结束语
文中对MRS的感知能力和控制架构进行文献调研,通过MRS在4种环境下不同应用领域进行综述和分类。当多机器系统的控制架构采用集中控制时,系统具有较好的控制品质,但由于其共享状态信息量的扩充带来了数据成倍的增加,导致机器人通信能力和计算能力严重制约系统性能;当MRS采用分布式控制时,由于只需对单个机器人进行控制,大幅度降低数据的处理难度,拥有较好的适应性和容错性;混合式控制作为上述2种方式的结合,在性能与效率处于较为合理的状态。其次大部分MRS的感知能力是采用拥有完整传感系统的全感知,根据自身需求选择传感器,采集环境和机载状态信息,降低多数据融合处理难度,是当前MRS感知能力研究重点;少数MRS使用基于模型传感的估计方式,但存在部分信息缺失的问题;此外,也有部分MRS考虑了传感器故障甚至损失时的少传感方式,传感器搜集的信息不完整,需利用合理的预测估计方法进行数据估计。
简言之,MRS研究已广泛应用于各领域,研究者不断寻求更优、更通用的解决方案,但仍需面对一些不可忽视的问题:1)采用集中式控制架构的MRS,由于系统严重依赖于集中控制单元,当通信和计算负荷增加时,容易造成整个系统瘫痪;2)系统在分布式控制架构下,信息交流可能不足,导致相邻机器人进行重复运算或产生背道而驰的运算结果,从而造成资源浪费;3)混合式控制架构具有结构复杂多变的特点,因此设计成本和技术难度较高;4)目前多传感融合技术可能会因为一个传感器阵列的不良数据而影响其他传感器的良好数据,从而导致不良结果;5)大量原始数据的传输也带来延迟和系统成本等挑战;6)基于模型估计的无传感方式运算过程相对复杂,数据量大,运算庞大,编程以及程序运行耗时较长。
此外,在文献分析过程中发现,MRS虽然从空中、地面、水面和水下4个角度都有完善的研究,但对地下角度的研究内容还存在一定的不足和空缺。由于通信技术、传感器感知、环境的复杂程度等多种因素影响,对于地下MRS的研究还比较欠缺,特别是当传感器受限、传感器发生故障甚至无传感器情况的发展缓慢。导致一旦发生意外,传感器不能及时反馈当前MRS的状态信息,中心控制器不能给出良好的修改方案、调整MRS的控制方法,最终影响任务的完成进度。因此,为了更好地研究和开发地球矿业环境和资源,加强地下MRS在少传感甚至无传感器情况下的协调控制有着极高的研究意义。
-
图 1 动态目标跟踪的感知能力
Fig. 1 Perception capability of dynamic target tracking
下载:
全尺寸图片
图 2 动态目标跟踪的控制架构
Fig. 2 Control architecture for dynamic target tracking
下载:
全尺寸图片
图 3 空域轻载运输的感知能力
Fig. 3 Perception of light-load transport in airspace
下载:
全尺寸图片
图 4 空域轻载运输的控制架构
Fig. 4 Control architecture for light load transport in airspace
下载:
全尺寸图片
图 5 环境搜索勘探的感知能力
Fig. 5 Perception ability of environmental search and exploration
下载:
全尺寸图片
图 6 环境搜索勘探的控制架构
Fig. 6 Control architecture for environmental search exploration
下载:
全尺寸图片
图 7 地面载荷运输的感知能力
Fig. 7 Perception of ground load transport
下载:
全尺寸图片
图 8 地面载荷运输的控制架构
Fig. 8 Control architecture for ground load transport
下载:
全尺寸图片
图 9 固定机械臂操作的感知能力
Fig. 9 Perception ability of fixed robotic arm operation
下载:
全尺寸图片
图 10 固定机械臂操作的控制架构
Fig. 10 Control architecture for fixed robotic arm operation
下载:
全尺寸图片
图 11 自主导航避障的感知能力
Fig. 11 Perception ability for autonomous navigation obstacle avoidance
下载:
全尺寸图片
图 12 自主导航避障的控制架构
Fig. 12 Control architecture for autonomous navigation and obstacle avoidance
下载:
全尺寸图片
图 13 环境搜索勘探的感知能力
Fig. 13 Perception ability of environmental search and exploration
下载:
全尺寸图片
图 14 环境搜索勘探的控制架构
Fig. 14 Control architecture for environmental search exploration
下载:
全尺寸图片
图 15 水面MRS的感知能力
Fig. 15 Perception ability of surface multi robot systems
下载:
全尺寸图片
图 16 水面MRS的控制架构
Fig. 16 Control architecture of water surface multi robot system
下载:
全尺寸图片
图 17 水下MRS的感知能力
Fig. 17 Perception ability of underwater multi robot systems
下载:
全尺寸图片
图 18 水下MRS的控制架构
Fig. 18 Control architecture of underwater multi robot system
下载:
全尺寸图片
表 1 空中MRS的主要应用分类
Table 1 Main application classification of airborne MRS
表 2 地面MRS的主要应用分类
Table 2 Main application classification of ground multi robot systems
文章 应用场景 控制框架 传感能力 Jiang等[51] 环境搜索 混合式控制 直接使用机载激光雷达传感器观察信息 Luo等[52] 环境搜索 集中式控制 携带测绘传感器和定位传感器的地面机器人的勘探区域 Anderson等[53] 环境搜索 分布式控制 仅由局部LED测距仪和扫描仪的信息识别搜索目标 Wahid等[54] 移动运输 集中式控制 由ECU和IMU测量车辆速度和横摆率值 Tatsumi等[55] 移动运输 分布式控制 没有外力传感器的情况实现多个机器人的移动运输 Mendiburu等[56] 导航避障 分布式控制 通过里程计、指南针和激光测距传感器收集信息 Bai等[57] 导航避障 集中式控制 使用激光扫描仪感知障碍物的位置 Ravankar等[58] 导航避障 混合式控制 装配摄像头和激光传感器感知环境 Zhou等[59] 原位操作 分布式控制 无力矩传感器力/位置的可重构机械手反馈控制 Peng等[60] 原位操作 集中式控制 通过接触力传感器协调摩擦抓取能力 表 3 水面MRS的主要应用分类
Table 3 Main application classification of surface MRS
文章 应用场景 控制框架 传感能力 Wang等[118] 目标跟踪 分布式控制 机载传感器(3D激光雷达、IMU和摄像头) Chen等[119] 免碰避障 分布式控制 雷达、激光测距仪、测声纳、多波束前视声纳和其他设备观测水面或水下环境 Farinelli等[120] 免碰避障 集中式控制 声学多普勒电流传感器感知的信息 Liu等[121] 免碰避障 混合式控制 由4个毫米波雷达测量速度和距离,陀螺罗盘用于获取航向和姿态数据 Moulton等[122] 环境监测 分布式控制 3D侧扫成像传感器、激光雷达、GPS、立体相机和单眼相机收集信息 Charalambopoulos等[123] 导航移动 集中式控制 根据各种机载传感器反馈的环境信息 Yang等[124] 巡航救援 分布式控制 结合全球导航卫星系统(global navigation satellite system,GNSS)、声纳和无线电通信感知环境 表 4 地面MRS的主要应用分类
Table 4 Main application classification of ground multi robot systems
-
[1] CAO Yan, WEI Wanyu, BAI Yu, et al. Multi-base multi-UAV cooperative reconnaissance path planning with genetic algorithm[J]. Cluster computing, 2019, 22(S3): 5175–5184. doi: 10.1007/s10586-017-1132-9 [2] BEG A, QURESHI A R, SHELTAMI T, et al. UAV-enabled intelligent traffic policing and emergency response handling system for the smart city[J]. Personal and ubiquitous computing, 2021, 25(1): 33–50. doi: 10.1007/s00779-019-01297-y [3] ERGEZER H, LEBLEBICIOĞLU K. 3D path planning for multiple UAVs for maximum information collection[J]. Journal of intelligent & robotic systems, 2014, 73(1-4): 737–762. [4] GEORGE J, SUJIT P B, SOUSA J B. Search strategies for multiple uav search and destroy missions[J]. Journal of intelligent & robotic systems, 2011, 61(1-4): 355–367. [5] APOSTOLIDIS S D, KAPOUTSIS P C, KAPOUTSIS A C, et al. Cooperative multi-UAV coverage mission planning platform for remote sensing applications[J]. Autonomous robots, 2022, 46(2): 373–400. doi: 10.1007/s10514-021-10028-3 [6] MAZA I, KONDAK K, BERNARD M, et al. Multi- UAV cooperation and control for load transporta- tion and deployment[J]. Journal of intelligent and robotic systems, 2010, 57(1-4): 417–449. doi: 10.1007/s10846-009-9352-8 [7] PENG Zhouhua, WANG Dan, LI Tieshan. Predictor-based neural dynamic surface control for distributed formation tracking of multiple marine surface vehicles with improved transient performance[J]. Science China information sciences, 2016, 59(9): 92210. doi: 10.1007/s11432-015-5384-9 [8] XIE Heng, DONG Kaixu, CHIRARATTANANON P. Cooperative transport of a suspended payload via two aerial robots with inertial sensing[J]. IEEE access, 2022, 10: 81764–81776. doi: 10.1109/ACCESS.2022.3194932 [9] ZHU Lihua, WANG Yu, WU Zhiqiang. An adaptive priority allocation for formation UAVs in complex context[J]. IEEE transactions on aerospace and electronic systems, 2021, 57(2): 1002–1015. doi: 10.1109/TAES.2020.3034016 [10] DENTLER J, ROSALIE M, DANOY G, et al. Collision avoidance effects on the mobility of a UAV swarm using chaotic ant colony with model predictive control[J]. Journal of intelligent & robotic systems, 2019, 93(1-2): 227–243. [11] ARBANAS B, IVANOVIC A, CAR M, et al. Decentralized planning and control for UAV-UGV cooperative teams[J]. Autonomous robots, 2018, 42(8): 1601–1618. doi: 10.1007/s10514-018-9712-y [12] PAN Yan, LI Shining, ZHANG Xiao, et al. Directional monitoring of multiple moving targets by multiple unmanned aerial vehicles[C]//2017 IEEE Global Communications Conference. Singapore: IEEE, 2017: 1−6. [13] FARMANI N, SUN L, PACK D. Tracking multiple mobile targets using cooperative Unmanned Aerial Vehicles[C]//2015 International Conference on Unmanned Aircraft Systems. Denver: IEEE, 2015: 395−400. [14] LI Chunyu, WANG Zidong, SONG Weihao, et al. Resilient unscented Kalman filtering fusion with dynamic event-triggered scheme: applications to multiple unmanned aerial vehicles[J]. IEEE transactions on control systems technology, 2023, 31(1): 370–381. doi: 10.1109/TCST.2022.3180942 [15] CAPITAN J, MERINO L, OLLERO A. Cooperative decision-making under uncertainties for multi-target surveillance with multiples UAVs[J]. Journal of intelligent & robotic systems, 2016, 84(1-4): 371–386. [16] KOTHARI M, SHARMA R, POSTLETHWAITE I, et al. Cooperative target-capturing with incomplete target information[J]. Journal of intelligent & robotic systems, 2013, 72(3-4): 373–384. [17] DULCE-GALINDO J A, SANTOS M A, RAFFO G V, et al. Distributed supervisory control for multi-plerobot autonomous navigation performing single-robot tasks[J]. Mechatronics, 2022, 86: 102848. doi: 10.1016/j.mechatronics.2022.102848 [18] QIAN Moshu, ZHANG Zhen, ZHENG Zhong, et al. Sliding mode control-based distributed fault tolerant tracking control for multiple unmanned aerial vehicles with input constraints and actuator faults[J]. International journal of robust and nonlinear control, 2022. [19] CHEN Xi, QIN Kaiyu, LOU Xuan, et al. Distributed motion control of UAVs for cooperative target location under compound constraints[C]//2021 18th International Computer Conference on Wavelet Active Media Technology and Information Processing. Chengdu: IEEE, 2021: 576−580. [20] CHEN Xia, ZHANG Chong. The method of multi unmanned aerial vehicle cooperative tracking in formation based on the theory of consensus[C]//2013 5th International Conference on Intelligent Human-Machine Systems and Cybernetics. Hangzhou: IEEE, 2013: 148−151. [21] PHAM H X, LA H M, FEIL-SEIFER D, et al. A distributed control framework of multiple unmanned aerial vehicles for dynamic wildfire tracking[J]. IEEE transactions on systems, man, and cybernetics:systems, 2020, 50(4): 1537–1548. doi: 10.1109/TSMC.2018.2815988 [22] HU Chaofang, MENG Zhou, QU Ge, et al. Distributed cooperative path planning for tracking ground moving target by multiple fixed-wing UAVs via DMPC-GVD in urban environment[J]. International journal of control, automation and systems, 2021, 19(2): 823–836. doi: 10.1007/s12555-019-0625-0 [23] ZHANG Boyang, SUN Xiuxia, LIU Shuguang, et al. Distributed fault tolerant model predictive control for multi‐unmanned aerial vehicle system[J]. Asian journal of control, 2022, 24(3): 1273–1292. doi: 10.1002/asjc.2521 [24] BRANDÃO A S, SARCINELLI-FILHO M. On the guidance of multiple UAV using a centralized formation control scheme and delaunay triangulation[J]. Journal of intelligent & robotic systems, 2016, 84(1-4): 397–413. [25] VILLA D K D, BRANDAO A S, SARCINELLI- FILHO M. Rod-shaped payload transportation using multiple quadrotors[C]//2019 International Conference on Unmanned Aircraft Systems. Atlanta: IEEE, 2019: 1036−1040. [26] LIERET M, KOGAN V, DOLL S, et al. Automated in-house transportation of small load carriers with autonomous unmanned aerial vehicles[C]//2019 IEEE 15th International Conference on Automation Science and Engineering. Vancouver: IEEE, 2019: 1010−1015. [27] KEYVAN M, JAFARINASAB M, SIROUSPOUR S, et al. Decentralized motion control in a cabled-based multi-drone load transport system[C]//2018 IEEE/RSJ International Conference on Intelligent Robots and Systems. Madrid: IEEE, 2018: 4198−4203. [28] BACELAR T, MADEIRAS J, MELICIO R, et al. On-board implementation and experimental validation of collaborative transportation of loads with multiple UAVs[J]. Aerospace science and technology, 2020, 107: 106284. doi: 10.1016/j.ast.2020.106284 [29] OMAR M, XU L, XIE X. Formation flight control of networked-delayed quadrotors for cooperative slung load transportation[C]//2022 IEEE International Conference on Mechatronics and Automation. Guilin: IEEE, 2022: 526−531. [30] SHIRANI B, NAJAFI M, IZADI I. Cooperative load transportation using multiple UAVs[J]. Aerospace science and technology, 2019, 84: 158–169. doi: 10.1016/j.ast.2018.10.027 [31] ABHINAY N S, SHOBHIT S, SRIDHAR N, et al. Cooperative aerial slung load transportation using a novel adaptive sliding mode controller[C]//2021 International Conference on Unmanned Aircraft Systems. Athens: IEEE, 2021: 804−813. [32] THAPA S, BAI H, ACOSTA J Á. Cooperative aerial manipulation with decentralized adaptive force-consensus control[J]. Journal of intelligent & robotic systems, 2020, 97(1): 171–183. [33] AGHDAM A S, MENHAJ M B, BARAZANDEH F, et al. Cooperative load transport with movable load center of mass using multiple quadrotor UAVs[C]//2016 4th International Conference on Control, Instrumentation, and Automation. Qazvin: IEEE, 2016: 23−27. [34] LIN Min, CHEN Yuming, HAN Rui, et al. Discrete optimization on truck-drone collaborative transportation system for delivering medical resources[J]. Discrete dynamics in nature and society, 2022, 2022: 1–13. [35] MOHIUDDIN A, ZWEIRI Y, ALMADHOUN R, et al. Energy distribution in Dual-UAV collaborative transportation through load sharing[J]. Journal of mechanisms and robotics, 2020: 1−14. [36] RAVANKAR A, RAVANKAR A, KOBAYASHI Y, et al. Autonomous mapping and exploration with unmanned aerial vehicles using low cost sensors[C]//5th International Electronic Conference on Sensors and Applications. Basel Switzerland: MDPI, 2018: 44. [37] HORYNA J, BACA T, WALTER V, et al. Decentralized swarms of unmanned aerial vehicles for search and rescue operations without explicit communication[J]. Autonomous robots, 2023, 47(1): 77–93. doi: 10.1007/s10514-022-10066-5 [38] YOKOYAMA C, TAKIMOTO M, KAMBAYASHI Y. Cooperative control of multi-robots using mobile agents in a three-dimensional environment[C]//2013 IEEE International Conference on Systems, Man, and Cybernetics. Manchester: IEEE, 2013: 1115−1120. [39] STEINER J A, BOURNE J R, HE Xiang, et al. Chemical-source localization using a swarm of decentralized unmanned aerial vehicles for urban/suburban environments[C]//Volume 3, Rapid Fire Interactive Presentations: Advances in Control Systems; Advances in Robotics and Mechatronics; Automotive and Transportation Systems; Motion Planning and Trajectory Tracking; Soft Mechatronic Actuators and Sensors; Unmanned Ground and. Park City: ASME, 2019. [40] PACE P, ALOI G, CALICIURI G, et al. A mission-oriented coordination framework for teams of mobile aerial and terrestrial smart objects[J]. Mobile networks and applications, 2016, 21(4): 708–725. doi: 10.1007/s11036-016-0726-4 [41] ZHU Man, WEN Yuanqiao. Design and analysis of collaborative unmanned surface-aerial vehicle cruise systems[J]. Journal of advanced transportation, 2019, 2019: 1–10. [42] GAO Chen, ZHEN Ziyang, GONG Huajun. A self-organized search and attack algorithm for multiple unmanned aerial vehicles[J]. Aerospace science and technology, 2016, 54: 229–240. doi: 10.1016/j.ast.2016.03.022 [43] DE MORAES R S, DE FREITAS E P. Distributed control for groups of unmanned aerial vehicles performing surveillance missions and providing relay communication network services[J]. Journal of intelligent & robotic systems, 2018, 92(3-4): 645–656. [44] YAO Peng, WANG Xiaodong, YI Ke. Optimal search for marine target using multiple unmanned aerial vehicles[C]//2018 37th Chinese Control Conference. Wuhan: IEEE, 2018: 4552−4556. [45] CHEN Linjie, LIU Qiankun, YANG Yifei, et al. Cooperative search self-organizing strategy for multiple unmanned aerial vehicles based on probability map and uncertainty map[C]//2020 Chinese Control And Decision Conference. Hefei: IEEE, 2020: 2685−2690. [46] WANG Tianyu, GU Wei. UAV deployment with grid modeling and adaptive multiple pruning search in complex forest scenarios[J]. Wireless networks, 2021. [47] LIU Zhong, GAO Xiaoguang, FU Xiaowei. A cooperative search and coverage algorithm with controllable revisit and connectivity maintenance for multiple unmanned aerial vehicles[J]. Sensors, 2018, 18(5): 1472. doi: 10.3390/s18051472 [48] JI Xiaoting, WANG Xiangke, NIU Yifeng, et al. Cooperative search by multiple unmanned aerial vehicles in a nonconvex environment[J]. Mathematical problems in engineering, 2015, 2015: 1–19. [49] YUE Wei, LI Chaofen, LIU Zhongchang, et al. A new search scheme using multi-bee-colony elite learning method for unmanned aerial vehicles in unknown environments[J]. Optimal control applications and methods, 2022, 43(6): 1645–1664. doi: 10.1002/oca.2918 [50] GARG V. Cooperative multi-robot target searching and tracking using velocity inspired robotic fruit fly algorithm[J]. SN computer science, 2021, 2(6): 474. doi: 10.1007/s42979-021-00880-6 [51] JIANG Chao, CHEN Zhou, GUO Yi. Learning decentralized control policies for multi-robot formation[C]//2019 IEEE/ASME International Conference on Advanced Intelligent Mechatronics. Hong Kong: IEEE, 2019: 758−765. [52] LUO Cai, ESPINOSA A P, PRANANTHA D, et al. Multi-robot search and rescue team[C]//2011 IEEE International Symposium on Safety, Security, and Rescue Robotics. Kyoto: IEEE, 2011: 296−301. [53] ANDERSON M, PAPANIKOLOPOULOS N. Implicit cooperation strategies for multi-robot search of unknown areas[J]. Journal of intelligent and robotic systems, 2008, 53(4): 381–397. doi: 10.1007/s10846-008-9242-5 [54] WAHID N, ZAMZURI H, AMER N H, et al. Vehicle collision avoidance motion planning strategy using artificial potential field with adaptive multi‐speed scheduler[J]. IET intelligent transport systems, 2020, 14(10): 1200–1209. doi: 10.1049/iet-its.2020.0048 [55] TATSUMI S, MURAKAMI T. Compliance control during cooperative transport using multiple mobile robots[J]. 2020, 588: 787-793. [56] MENDIBURU F J, MORAIS M R A, LIMA A M N. Behavior coordination in multi-robot systems[C]//2016 IEEE International Conference on Automatica. Curico: IEEE, 2016: 1−7. [57] BAI Chengchao, YAN Peng, PAN Wei, et al. Learning-based multi-robot formation control with obstacle avoidance[J]. IEEE transactions on intelligent transportation systems, 2022, 23(8): 11811–11822. doi: 10.1109/TITS.2021.3107336 [58] RAVANKAR A, RAVANKAR A A, KOBAYASHI Y, et al. Hitchhiking based symbiotic multi-robot navigation in sensor networks[J]. Robotics, 2018, 7(3): 37. doi: 10.3390/robotics7030037 [59] ZHOU Fan, DONG Bo, LI Yuanchun. Torque sens- orless force/position decentralized control for const- rained reconfigurable manipulator with harmonic drive transmission[J]. International journal of control, automation and systems, 2017, 15(5): 2364–2375. doi: 10.1007/s12555-016-0248-7 [60] PENG Yuanchih, CARABIS D S, WEN J T. Collab- orative manipulation with multiple dualarm robots under human guidance[J]. International journal of intelligent robotics and applications, 2018, 2(2): 252–266. doi: 10.1007/s41315-018-0053-y [61] RAUNIYAR A, UPRETI H C, MISHRA A, et al. MeWBots: mecanum-wheeled robots for collaborative manipulation in an obstacle-clustered environment without communication[J]. Journal of intelligent & robotic systems, 2021, 102(1): 3. [62] HICHRI B, FAUROUX J C, ADOUANE L, et al. Design of cooperative mobile robots for co-manipulation and transportation tasks[J]. Robotics and computer-integrated manufacturing, 2019, 57: 412–421. doi: 10.1016/j.rcim.2019.01.002 [63] AMANATIADIS A, HENSCHEL C, BIRKICHT B, et al. AVERT: An autonomous multi-robot system for vehicle extraction and transportation[C]//2015 IEEE International Conference on Robotics and Automation. Seattle: IEEE, 2015: 1662−1669. [64] YAN Zhi, JOUANDEAU N, ALI-CHERIF A. Multi -robot heuristic goods transportation[C]//2012 6th IEEE International Conference Intel-Ligent Systems. Sofia: IEEE, 2012: 409−414. [65] HU Zhixian, ZHAO Zhixiang, ZHANG Lianxin, et al. Collaborative object transportation by multiple robots with onboard object localization algorithm[C]//2019 IEEE International Conference on Robotics and Biomimetics. Dali: IEEE, 2019: 2344−2350. [66] MANKO S V, DIANE S A K, KRIVOSHATSKIY A E, et al. Adaptive control of a multi-robot system for transportation of large-sized objects based on reinforcement learning[C]//2018 IEEE Conference of Russian Young Researchers in Electrical and Electronic Engineering. Moscow and St. Petersburg: IEEE, 2018: 923−927. [67] ZHANG Tianrui, XU Jianan, WU Baoku. Hybrid path planning model for multiple robots considering obstacle avoidance[J]. IEEE access, 2022, 10: 71914–71935. doi: 10.1109/ACCESS.2022.3188784 [68] HARIK E H C, GUERIN F, GUINAND F, et al. UAV-UGV cooperation for objects transportation in an industrial area[C]//2015 IEEE International Conference on Industrial Technology. Seville: IEEE, 2015: 547−552. [69] HABIBI G, KINGSTON Z, XIE W, et al. Distributed centroid estimation and motion controllers for collective transport by multi-robot systems[C]//2015 IEEE International Conference on Robotics and Automation. Seattle: IEEE, 2015: 1282−1288. [70] YANG X, WATANABE K, IZUMI K, et al. A decentralized control system for cooperative transportation by multiple non-holonomic mobile robots[J]. International journal of control, 2004, 77(10): 949–963. doi: 10.1080/00207170410001719765 [71] FARIVARNEJAD H, WILSON S, BERMAN S. Decentralized sliding mode control for autonomous collective transport by multi-robot systems[C]//2016 IEEE 55th Conference on Decision and Control. Las Vegas: IEEE, 2016: 1826−1833. [72] ZHANG Lin, SUN Yufeng, BARTH A, et al. Decentralized control of multi-robot system in cooperative object transportation using deep reinforcement learning[J]. IEEE access, 2020, 8: 184109–184119. doi: 10.1109/ACCESS.2020.3025287 [73] KASHIWAZAKI K, YONEZAWA N, ENDO M, et al. A car transportation system using multiple mobile robots: iCART II[C]//2011 IEEE/RSJ International Conference on Intelligent Robots and Systems. San Francisco: IEEE, 2011: 4593−4600. [74] DAI Yanyan, KIM Y, WEE S, et al. Symmetric caging formation for convex polygonal object transportation by multiple mobile robots based on fuzzy sliding mode control[J]. ISA transactions, 2016, 60: 321–332. doi: 10.1016/j.isatra.2015.11.017 [75] NAVARRO-ALARCON D, LIU Y H. Fourier-based shape servoing: a new feedback method to actively deform soft objects into desired 2-D image contours[J]. IEEE transactions on robotics, 2018, 34(1): 272–279. doi: 10.1109/TRO.2017.2765333 [76] VO C D, DANG D A, LE P H. Development of multi-robotic arm system for sorting system using computer vision[J]. Journal of robotics and control, 2022, 3(5): 690–698. doi: 10.18196/jrc.v3i5.15661 [77] NAVARRO-ALARCON D, LIU Y H, ROMERO J G, et al. Model-free visually servoed deformation control of elastic objects by robot manipulators[J]. IEEE transactions on robotics, 2013, 29(6): 1457–1468. doi: 10.1109/TRO.2013.2275651 [78] LI Yinxiao, WANG Yan, YUE Yonghao, et al. Model-driven feedforward prediction for manipulation of deformable objects[J]. IEEE transactions on automation science and engineering, 2018, 15(4): 1621–1638. doi: 10.1109/TASE.2017.2766228 [79] HE BAI, WEN J T. Cooperative load transport: a formation-control perspective[J]. IEEE transactions on robotics, 2010, 26(4): 742–750. doi: 10.1109/TRO.2010.2052169 [80] DELGADO A, CORRALES J A, MEZOUAR Y, et al. Tactile control based on Gaussian images and its application in bi-manual manipulation of deformable objects[J]. Robotics and autonomous systems, 2017, 94: 148–161. doi: 10.1016/j.robot.2017.04.017 [81] KRUSE D, RADKE R J, WEN J T. Collaborative human-robot manipulation of highly deformable materials[C]//2015 IEEE International Conference on Robotics and Automation. Seattle: IEEE, 2015: 3782−3787. [82] HIGASHIMORI M, YOSHIMOTO K, KANEKO M. Active shaping of an unknown rheological object based on deformation decomposition into elasticity and plasticity[C]//2010 IEEE International Conference on Robotics and Automation. Anchorage: IEEE, 2010: 5120−5126. [83] HE Yanhao, WU Min, LIU Steven. A cooperative optimization strategy for distributed multi-robot manipulation with obstacle avoidance and internal performance maximization[J]. Mechatronics, 2021, 76: 102560. doi: 10.1016/j.mechatronics.2021.102560 [84] DI LILLO P, PIERRI F, ANTONELLI G, et al. A framework for set-based kinematic control of multi-robot systems[J]. Control engineering practice, 2021, 106: 104669. doi: 10.1016/j.conengprac.2020.104669 [85] HE Yuhong, LI Xiaoxiao, XU Zhihao, et al. Collaboration of multiple SCARA robots with guaranteed safety using recurrent neural networks[J]. Neurocomputing, 2021, 456: 1–10. doi: 10.1016/j.neucom.2021.05.049 [86] JIN Long, LI Shuai, LUO Xin, et al. Nonlinearly-activated noise-tolerant zeroing neural network for distributed motion planning of multiple robot arm [C]//2017 International Joint Conference on Neural Networks. Anchorage: IEEE, 2017: 4165−4170. [87] HA Huy, XU Jingxi, SONG Shuran. Learning a decentralized multi-arm motion planner[EB/OL]. (2020−11−05)[2023−04−01]. https://doi.org/10.48550/arXiv.2011.02608. [88] LIU Mei, ZHANG Jiazheng, SHANG Mingsheng. Real-time cooperative kinematic control for multiple robots in distributed scenarios with dynamic neural networks[J]. Neurocomputing, 2022, 491: 621–632. doi: 10.1016/j.neucom.2021.12.038 [89] BASILE F, CACCAVALE F, CHIACCHIO P, et al. Task-oriented motion planning for multi-arm robotic systems[J]. Robotics and computer-integrated manufacturing, 2012, 28(5): 569–582. doi: 10.1016/j.rcim.2012.02.007 [90] ALONSO-MORA J, KNEPPER R, SIEGWART R, et al. Local motion planning for collaborative multi-robot manipulation of deformable objects[C]//2015 IEEE International Conference on Robotics and Automation. Seattle: IEEE, 2015: 5495−5502. [91] LIN Juntong, YANG Xuyun, ZHENG Peiwei, et al. End-to-end decentralized multi-robot navigation in unknown complex environments via deep reinfor- cement learning[C]//2019 IEEE International Conference on Mechatronics and Automation. Tianjin: IEEE, 2019: 2493−2500. [92] FU Junjie, LUV Yuezu, WEN Guanghui, et al. Local measurement based formation navigation of nonh- olonomic robots with globally bounded inputs and collision avoidance[J]. IEEE transactions on network science and engineering, 2021, 8(3): 2342–2354. doi: 10.1109/TNSE.2021.3089833 [93] CHEN Wenzhou, ZHOU Shizheng, PAN Zaisheng, et al. Mapless collaborative navigation for a multi-robot system based on the deep reinforcement learning[J]. Applied sciences, 2019, 9(20): 4198. doi: 10.3390/app9204198 [94] COGNETTI M, ORIOLO G, PELITI P, et al. Coop- erative control of a heterogeneous multi-robot system based on relative localization[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago: IEEE, 2014: 350−356. [95] PANDEY A, KASHYAP A K, PARHI D R, et al. Autonomous mobile robot navigation between static and dynamic obstacles using multiple ANFIS architecture[J]. World journal of engineering, 2019, 16(2): 275–286. doi: 10.1108/WJE-03-2018-0092 [96] WANG Mingyu, SCHWAGER M. Distributed collision avoidance of multiple robots with probabilistic buffered voronoi cells[C]//2019 International Symposium on Multi-Robot and Multi-Agent Systems. New Brunswick: IEEE, 2019: 169−175. [97] CHEN Guangda, YAO Shunyi, MA Jun, et al. Distributed non-communicating multi-robot collision avoidance via map-based deep reinforcement learning[J]. Sensors, 2020, 20(17): 4836. doi: 10.3390/s20174836 [98] HAN Ruihua, CHEN Shengduo, WANG Shuaijun, et al. Reinforcement learned distributed multi-robot navigation with reciprocal velocity obstacle shaped rewards[J]. IEEE robotics and automation letters, 2022, 7(3): 5896–5903. doi: 10.1109/LRA.2022.3161699 [99] FU Junjie, WEN Guanghui, YU Xinghuo, et al. Distributed formation navigation of constrained second-order multiagent systems with collision avoidance and connectivity maintenance[J]. IEEE transactions on cybernetics, 2022, 52(4): 2149–2162. doi: 10.1109/TCYB.2020.3000264 [100] ZHAI Yuanzhao, DING Bo, LIU Xuan, et al. Decentralized multi-robot collision avoidance in complex scenarios with selective communication[J]. IEEE robotics and automation letters, 2021, 6(4): 8379–8386. doi: 10.1109/LRA.2021.3102636 [101] ZHU Hai, ALONSO-MORA J. B-UAVC: buffered uncertainty-aware voronoi cells for probabilistic multi-robot collision avoidance[C]//2019 International Symposium on Multi-Robot and Multi-Agent Systems. New Brunswick: IEEE, 2019: 162−168. [102] BALCH T, ARKIN R C. Behavior-based formation control for multirobot teams[J]. IEEE transactions on robotics and automation, 1998, 14(6): 926–939. doi: 10.1109/70.736776 [103] ZHOU Huaidong, FENG Pengbo, CHOU Wusheng. A hybrid obstacle avoidance method for mobile robot navigation in unstructured environment[J]. Industrial robot: the international journal of robotics research and application, 2023, 50(1): 94–106. doi: 10.1108/IR-04-2022-0102 [104] HACENE N, MENDIL B. Behavior-based autonomous navigation and formation control of mobile robots in unknown cluttered dynamic environments with dynamic target tracking[J]. International journal of automation and computing, 2021, 18(5): 766–786. doi: 10.1007/s11633-020-1264-x [105] CHINNAIAH M C, SAVITRI T S, KUMAR P R. A novel approach in navigation of FPGA robots in robust indoor environment[C]//2015 International Conference on Advanced Robotics and Intelligent Systems. Taipei: IEEE, 2015: 1−6. [106] WANG Dongshu, WANG Haitao, LIU Lei. Unknown environment exploration of multi-robot system with the FORDPSO[J]. Swarm and evolutionary computation, 2016, 26: 157–174. doi: 10.1016/j.swevo.2015.09.004 [107] DUBE R, GAWEL A, SOMMER H, et al. An online multi-robot SLAM system for 3D LiDARs[C]//2017 IEEE/RSJ International Conference on Intelligent Robots and Systems. Vancouver: IEEE, 2017: 1004−1011. [108] YASUDA G. Behavior-based autonomous cooperative control of intelligent mobile robot systems with embedded Petri nets[C]//2014 Joint 7th International Conference on Soft Computing and Intelligent Systems and 15th International Symposium on Advanced Intelligent Systems. Kitakyushu: IEEE, 2014: 1085−1090. [109] CORAH M, O’MEADHRA C, GOEL K, et al. Communication-efficient planning and mapping for multi-robot exploration in large environments[J]. IEEE robotics and automation letters, 2019, 4(2): 1715–1721. doi: 10.1109/LRA.2019.2897368 [110] FUNG N, ROGERS J, NIETO C, et al. Coordinating multi-robot systems through environment partitioning for adaptive informative sampling[C]//2019 International Conference on Robotics and Automation. Montreal: IEEE, 2019: 3231−3237. [111] HU Junyan, NIU Hanlin, CARRASCO J, et al. Voronoi-based multi-robot autonomous exploration in unknown environments via deep reinforcement learning[J]. IEEE transactions on vehicular technology, 2020, 69(12): 14413–14423. doi: 10.1109/TVT.2020.3034800 [112] TANG Hongwei, SUN Wei, LIN Anping, et al. A GWO-based multi-robot cooperation method for target searching in unknown environments[J]. Expert systems with applications, 2021, 186: 115795. doi: 10.1016/j.eswa.2021.115795 [113] LI Jie, TAN Ying. A probabilistic finite state machine based strategy for multi-target search using swarm robotics[J]. Applied soft computing, 2019, 77: 467–483. doi: 10.1016/j.asoc.2019.01.023 [114] KABIR R H, LEE K. Efficient, decentralized, and collaborative multi-robot exploration using optimal transport theory[C]//2021 American Control Conference. New Orleans: IEEE, 2021: 4203−4208. [115] JIA Chengcheng, YANG Yajun, YANG Xuerong. Distributed area coverage control for multi-agent based on artificial potential field[C]//2019 IEEE International Conference on Unmanned Systems. Beijing: IEEE, 2019: 314−317. [116] GENG Mingyang, XU Kele, ZHOU Xing, et al. Learning to cooperate via an attention-based communication neural network in decentralized multi-robot exploration[J]. Entropy, 2019, 21(3): 294. doi: 10.3390/e21030294 [117] RISTIC B, ANGLEY D, MORAN B, et al. Autonomous multi-robot search for a hazardous source in a turbulent environment[J]. Sensors, 2017, 17(4): 918. doi: 10.3390/s17040918 [118] WANG Wei, WANG Zijian, MATEOS L, et al. Distributed motion control for multiple connected surface vessels[C]//2020 IEEE/RSJ International Conference on Intelligent Robots and Systems. Las Vegas: IEEE, 2020: 11658−11665. [119] CHEN Yaojie, XIANG Shangshang, CHEN feixiang. Research on a task planning method for multi-ship cooperative driving[J]. Journal of Shanghai Jiaotong University (Science), 2019, 24(2): 233–242. doi: 10.1007/s12204-019-2057-7 [120] FARINELLI A, RAEISSI M M, MARCHI N, et al. Interacting with team oriented plans in multi-robot systems[J]. Autonomous agents and multi-agent systems, 2017, 31(2): 332–361. doi: 10.1007/s10458-016-9344-6 [121] LIU Chenguang, QI Junlin, CHU Xiumin, et al. Cooperative ship formation system and control methods in the ship lock waterway[J]. Ocean engineering, 2021, 226: 108826. doi: 10.1016/j.oceaneng.2021.108826 [122] MOULTON J, KARAPETYAN N, BUKHSBAUM S, et al. An autonomous surface vehicle for long term operations[C]//OCEANS 2018 MTS/IEEE Charleeston. Charleston: IEEE, 2018: 0197−7385. [123] CHARALAMBOPOULOS N, NEARCHOU A C. Ship routing using genetic algorithms[J]. Operations research forum, 2021, 2(3): 45. doi: 10.1007/s43069-021-00093-w [124] YANG Xiaofei, SHI Yilun, LIU Wei et al. Global path planning algorithm based on double DQN for multi-tasks amphibious unmanned surface vehicle[J]. Ocean engineering, 2022, 266: 112809. doi: 10.1016/j.oceaneng.2022.112809 [125] HONG Xiaobin, CUI Bin, CHEN Weiguo, et al. Research on multi-ship target detection and tracking method based on camera in complex scenes[J]. Journal of marine science and engineering, 2022, 10(7): 978. doi: 10.3390/jmse10070978 [126] FEFILATYEV S, GOLDGOF D, SHREVE M, et al. Detection and tracking of ships in open sea with rapidly moving buoy-mounted camera system[J]. Ocean engineering, 2012, 54: 1–12. doi: 10.1016/j.oceaneng.2012.06.028 [127] ALMEIDA J, SILVESTRE C, PASCOAL A. Cooperative control of multiple surface vessels in the presence of ocean currents and parametric model uncertainty[J]. International journal of robust and nonlinear control, 2010, 20(14): 1549–1565. doi: 10.1002/rnc.1526 [128] ZHANG Yunpeng, XING Mengdao, ZHANG Jinsong, et al. Robust multi-ship tracker in sar imagery by fusing feature matching and modified KCF[J]. IEEE geoscience and remote sensing letters, 2023, 20: 1–5. [129] HU Yingjun, ZHANG Anmin, TIAN Wuliu, et al. Multi-ship collision avoidance decision-making based on collision risk index[J]. Journal of marine science and engineering, 2020, 8(9): 640. doi: 10.3390/jmse8090640 [130] XIONG Jianbin, SHU Lei, WANG Qinruo, et al. A scheme on indoor tracking of ship dynamic positioning based on distributed multi-sensor data fusion[J]. IEEE access, 2017, 5: 379–392. doi: 10.1109/ACCESS.2016.2607232 [131] ZHENG Rongcai, XIE Hongwei, YUAN Kexin. Autonomous collision avoidance system in a multi-ship environment based on proximal policy optimization method[J]. Ocean engineering, 2023, 272: 113779. doi: 10.1016/j.oceaneng.2023.113779 [132] NIELSEN U D, BRODTKORB A H, SØRENSEN A J. Sea state estimation using multiple ships simultaneously as sailing wave buoys[J]. Applied ocean research, 2019, 83: 65–76. doi: 10.1016/j.apor.2018.12.004 [133] CUI Zongyong, LI Qi, CAO Zongjie, et al. Dense attention pyramid networks for multi-scale ship detection in SAR images[J]. IEEE transactions on geoscience and remote sensing, 2019, 57(11): 8983–8997. doi: 10.1109/TGRS.2019.2923988 [134] LI Shijie, LIU Jialun, NEGENBORN R R. Distributed coordination for collision avoidance of multiple ships considering ship maneuverability[J]. Ocean engineering, 2019, 181: 212–226. doi: 10.1016/j.oceaneng.2019.03.054 [135] DO K D. Synchronization motion tracking control of multiple underactuated ships with collision avoidance[J]. IEEE transactions on industrial electronics, 2016, 63(5): 2976–2989. doi: 10.1109/TIE.2016.2523453 [136] ZHANG Jinfen, ZHANG Di, YAN Xinping, et al. A distributed anti-collision decision support formulation in multi-ship encounter situations under COLREGs[J]. Ocean engineering, 2015, 105: 336–348. doi: 10.1016/j.oceaneng.2015.06.054 [137] DO K D. Practical formation control of multiple underactuated ships with limited sensing ranges[J]. Robotics and autonomous systems, 2011, 59(6): 457–471. doi: 10.1016/j.robot.2011.03.003 [138] WANG Tengfei, WU Qing, ZHANG Jinfen, et al. Autonomous decision-making scheme for multi-ship collision avoidance with iterative observation and inference[J]. Ocean engineering, 2020, 197: 106873. doi: 10.1016/j.oceaneng.2019.106873 [139] WANG Tengfei, YAN Xinping, WANG Yang, et al. A distributed model predictive control using virtual field force for multi-ship collision avoidance under COLREGs[C]//2017 4th International Conference on Transportation Information and Safety. Banff: IEEE, 2017: 296−305. [140] LIU Y, BUCKNALL R. Path planning algorithm for unmanned surface vehicle formations in a practical maritime environment[J]. Oceanengineering, 2015, 97: 126–144. [141] BRUZZONE G, BIBULI M, ZEREIK E, et al. Cooperative adaptive guidance and control paradigm for marine robots in an emergency ship towing scenario[J]. International journal of adaptive control and signal processing, 2017, 31(4): 562–580. doi: 10.1002/acs.2667 [142] LIU Wang, LYU Xiafu. Distributed cooperative formation of multiple unmanned ships based on KF[J]. Journal of physics: conference series, 2021, 1754(1): 012097. doi: 10.1088/1742-6596/1754/1/012097 [143] LI Shuai, GUO Yi, BINGHAM B. Multi-robot cooperative control for monitoring and tracking dynamic plumes[C]//2014 IEEE International Conference on Robotics and Automation. Hong Kong: IEEE, 2014: 67−73. [144] SUN Ting, LIU Cheng, WANG Xuegang. Distributed anti-windup NN-sliding mode formation control of multi-ships with minimum cost[J]. ISA transactions, 2023, 138: 49-62 [145] SUN Xiaoming, GE Shuzhi, ZHANG Jun, et al. Adaptive region tracking control for multi-ships coordination[J]. IFAC proceedings volumes, 2013, 46(20): 39–44. doi: 10.3182/20130902-3-CN-3020.00175 [146] WANG Kai, LI Jiayuna, YAN Xinping, et al. A novel bi-level distributed dynamic optimization method of ship fleets energy consumption[J]. Ocean engineering, 2020, 197: 106802. doi: 10.1016/j.oceaneng.2019.106802 [147] ROSS J, LINDSAY J, GREGSON E, et al. Collaboration of multi-domain marine robots towards above and below-water characterization of floating targets[C]//2019 IEEE International Symposium on Robotic and Sensors Environments. Ottawa: IEEE, 2019: 1−7. [148] FENG Zhi, HU Guoqiang. Formation tracking control for a team of networked underwater robot systems with uncertain hydrodynamics[C]//2018 IEEE International Conference on Real-time Computing and Robotics. Kandima: IEEE, 2018: 372−377. [149] SHI Liwei, BAO Pengxiao, GUO Shuxiang, et al. Underwater formation system design and implement for small spherical robots[J]. IEEE systems journal, 2023, 17(1): 1259–1269. doi: 10.1109/JSYST.2022.3199574 [150] PHAM H A, SORIANO T, NGO V H, et al. Distributed adaptive neural network control applied to a formation tracking of a group of low-cost underwater drones in hazardous environments[J]. Applied sciences, 2020, 10(5): 1732. [151] RYUH Youngsun, YANG Gihun, LIU Jindong, et al. A school of robotic fish for mariculture monitoring in the sea coast[J]. Journal ofbionic engineering, 2015, 12(1): 37–46. [152] MEDAGODA L, WILLIAMS S B, PIZARRO O, et al. Mid-water current aided localization for autonomous underwater vehicles[J]. Autonomous robots, 2016, 40(7): 1207–1227. doi: 10.1007/s10514-016-9547-3 [153] AN Ruochen, GUO Shuxiang, YU Yuanhua, et al. Task planning and collaboration of jellyfish-inspired multiple spherical underwater robots[J]. Journal of bionic engineering, 2022, 19(3): 643–656. doi: 10.1007/s42235-022-00164-6 [154] BOTELHO S, NEVES R, TADDEI L, et al. Using augmented state Kalman filter to localize multi autonomous underwater vehicles[J]. Journal of the brazilian computer society, 2007, 13(2): 61–70. doi: 10.1007/BF03192410 [155] HE Yanlin, ZHU Lianqiang, SUN Guangkai, et al. Cooperative localization and evaluation of small- scaled spherical underwater robots[J]. Microsystem technologies, 2019, 25(2): 573–585. doi: 10.1007/s00542-018-4014-z [156] WANG Sen, CHEN Ling, HU Huosheng, et al. Underwater localization and environment mapping using wireless robots[J]. Wireless personal communications, 2013, 70(3): 1147–1170. doi: 10.1007/s11277-013-1106-z [157] HARBIN J, GERASIMOU S, MATRAGKAS N, et al. Model-driven simulation-based analysis for multi-robot systems[C]//2021 ACM/IEEE 24th International Conference on Model Driven Engineering Languages and Systems. Fukuoka: IEEE, 2021: 331−341. [158] PAULL L, SETO M, LEONARD J J. Decentralized cooperative trajectory estimation for autonomous underwater vehicles[C]//2014 IEEE/RSJ International Conference on Intelligent Robots and Systems. Chicago: IEEE, 2014: 184−191. [159] CUI Ronxin, CHEN Lepeng, YANG Chengguang, et al. Extended state observer-based integral sliding mode control for an underwater robot with unknown disturbances and uncertain nonlinearities[J]. IEEE transactions on industrial electronics, 2017, 64(8): 6785–6795. doi: 10.1109/TIE.2017.2694410 [160] HALSTED T, SCHWAGER M. Distributed multi- robot localization from acoustic pulses using Euclid- ean distance geometry[C]//2017 International Symposium on Multi-Robot and Multi-Agent Systems. Los Angeles: IEEE, 2017: 104−111. [161] GUO Shuxiang, CAO Sheng, GUO Jian, et al. Study on distributed data processing system for decentralized spherical multi-robot based on edge computing and blockchain[C]//2020 IEEE International Conference on Mechatronics and Automation. Beijing: IEEE, 2020: 1852−1857. [162] LIU Hao, WANG Yanhu, LEWIS F L. Robust distributed formation controller design for a group of unmanned underwater vehicles[J]. IEEE transactions on systems, man, and cybernetics:systems, 2021, 51(2): 1215–1223. doi: 10.1109/TSMC.2019.2895499 [163] RATHNAM, BIRK A. Distributed communicative exploration under underwater communication constraints[C]//2011 IEEE International Symposium on Safety, Security, and Rescue Robotics. Kyoto: IEEE, 2011: 339−344. [164] HOLLINGER G A, YERRAMALLI S, SINGH S, et al. Distributed coordination and data fusion for underwater search[C]//2011 IEEE International Conference on Robotics and Automation. Shanghai: IEEE, 2011: 349−355. [165] JIA Qingyong, XU Hongli, FENG Xisheng, et al. Research on cooperative area search of multiple underwater robots based on the prediction of initial target information[J]. Ocean engineering, 2019, 172: 660–670. doi: 10.1016/j.oceaneng.2018.12.035 [166] PENG Zhouhua, WANG Dan, WANG Hao, et al. Distributed coordinated tracking of multiple autonomous underwater vehicles[J]. Nonlinear dynamics, 2014, 78(2): 1261–1276. doi: 10.1007/s11071-014-1513-z [167] SUN Bing, ZHU Daqi, TIAN Chen, et al. Complete coverage autonomous underwater vehicles path planning based on glasius bioinspired neural network algorithm for discrete and centralized programming[J]. IEEE transactions on cognitive and developmental systems, 2019, 11(1): 73–84. doi: 10.1109/TCDS.2018.2810235 [168] GU Shuoxin, ZHANG Linshuai, GUO Shuxiang, et al. Communication and cooperation for spherical underwater robots by using acoustic transmission[J]. IEEE/ASME transactions on mechatronics, 2023, 28(1): 292–301. doi: 10.1109/TMECH.2022.3199598 [169] JIA Qingyong, XU Hongli, LI Guannan, et al. Research on synergy pursuit strategy of multiple underwater robots[J]. Journal of intelligent & robotic systems, 2020, 97(3-4): 673–694.
