
Ship route extraction based on GRU auto-encoder
-
摘要: 船舶自动识别系统(automatic identification system, AIS)数据中蕴含着大量的船舶行为相关信息,从中提取出有效的航线,在海事监管、船只勘查等方面具有广泛应用。本文提出一种基于GRU自编码器(gate recuurent unit auto-encoder,GRU-AE)的船舶航线提取方法,首先采用GRU编码器将原始轨迹数据编码为统一格式的深度特征信息,其次利用DBSCAN (density-based spatial clustering of applications with noise)算法对深度特征信息进行聚类,最后将深度特征类簇中心通过解码器反演生成相应的船舶航线,从而实现在海量AIS数据中挖掘船舶轨迹规律。以波士顿港口为例,分析一年时间内10万多条AIS的船舶航行数据,实验表明本方法可对不同长度轨迹数据进行聚类及其航线提取,并可支撑船舶轨迹异常检测、路径规划、位置预测等研究,具有较好的应用适应性。Abstract: The automatic identification system (AIS) data consists of a large amount of information associated with shipping behavior. A wide range of applications in maritime supervision and ship surveys can be made use of by extracting useful ship routes from AIS data. The gate recurrent unit auto-encoder (GRU-AE) is the foundation of a method for ship route extraction that is suggested. First, the GRU encoder is employed to encode the original trajectory data into deep feature information in a unified form; then, deep feature information is clustered using the DBSCAN algorithm; and finally, the deep feature cluster center is inverted through the decoder to produce the corresponding ship route, to achieve the mining of the ship trajectory pattern in the massive AIS data. Taking the Port of Boston as an example, more than 100,000 AIS ship navigation data in one year are examined. Experiments reveal that this technique can cluster and extract route data of various lengths and can support the research of ship trajectory abnormality identification, path planning, position prediction, etc., revealing good application adaptability.
-
随着船舶自动识别系统(automatic identification system, AIS) 在船上的广泛应用,船舶轨迹数据的获取越来越容易,如何从这些海量的数据中挖掘出有价值的信息,对于研究船舶交通行为模式、分析船舶交通流特征具有重要的意义[1]。
在众多轨迹分析任务中,航线提取可以从凌乱繁杂的轨迹中得到船舶运动的主要线路,是船舶轨迹异常检测、位置预测等研究的基础。目前,有关航线的研究主要存在于航线设计[2-5]和航线规划[6-10]方面,有关航线提取方面的研究较少。船舶航线指特定海域内大量船舶航行轨迹反映出的航线簇的特征线[11],Halpern等[12]利用格网统计法,通过统计网格内船舶出现的频次来反映船舶的分布,进一步判断主要航线。Lin等[13]对不同的轨迹进行比较,将相似的轨迹合并得到船舶航线。Wang等[14]利用核密度方法对南海的主要航线进行了提取。具体而言,提取船舶航线可分为轨迹聚类和提取聚类典型轨迹两个问题。
轨迹聚类旨在发现具有相似运动模式的轨迹簇,揭示运动目标的潜在特征[15]。传统轨迹聚类方法在定义了轨迹相似度的基础上,利用基于距离和基于密度的算法对轨迹进行聚类。Lee等[16]首次将每条轨迹划分为轨迹段,并利用基于密度的聚类算法对轨迹段进行聚类。Pallotta等[17-19]利用增量DBSCAN算法对AIS船舶轨迹中的特征点进行聚类,并在次基础上提取了船舶交通运动模式。Vries 等[20]将船舶轨迹看作时间序列,采用动态时间规整(dynamic time warping,DTW) 和编辑距离(edit distance,ED)来计算轨迹的相似度,并且结合轨迹压缩的方法,利用核k均值算法对船舶AIS轨迹聚类。Wang等[21]提出一种基于Hausdorff距离和HDBSCAN的船舶轨迹聚类方法,这种方法可以自适应地将船舶轨迹的形状特征进行聚类,并具有良好的可扩展性。
聚类典型轨迹是指能代表每一类轨迹整体的长度、方向、位置和形状的轨迹。Coelho等[22]利用定义的投票函数从轨迹簇中选择典型轨迹。Lee等[16]将轨迹段视为向量并通过计算平均向量来得到代表轨迹。王加胜等[11]采用基于三角网的两线中心线提取算法,将聚类中心线计算转化为两条中心线进行计算,通过迭代的方法得到最终的聚类中心线。
基于传统轨迹聚类的方法虽然可以对一定时间和区域内的船舶轨迹进行聚类,但在定义不同长度轨迹间的距离度量时较为困难。而在提取典型轨迹时,传统方法定义较复杂,且需要一定的后续处理才能得到最终的典型轨迹。针对以上问题,本文提出采用GRU自编码器(GRU-AE)进行AIS数据的深度信息编码,可将不同长度的轨迹编码表示为统一格式的深度特征,结合DBSCAN算法,再利用聚类簇中心解码反演进行船舶航线提取,从海量AIS数据中挖掘船舶轨迹规律。
1. 基于GRU-AE的航线提取方法
船舶航线是指能代表众多船舶轨迹在空间上的整体特征(长度、方向、位置和形状)的特征线。利用AIS数据挖掘的船舶航线提取流程如图1所示。
 图 1 利用AIS数据的船舶航线提取流程Fig. 1 Ship route extraction process using AIS data
图 1 利用AIS数据的船舶航线提取流程Fig. 1 Ship route extraction process using AIS data 下载:
全尺寸图片
下载:
全尺寸图片
提取流程可分为两个主要过程。其一是利用GRU自编码器提取船舶轨迹中的深度特征,该过程包含AIS原始数据的预处理,以及GRU自编码器的构建与训练。首先根据速度与时间阈值从原始AIS数据中分离出合理的船舶轨迹,其次将船舶轨迹通过编码器生成其深度特征,再通过解码器生成解码轨迹,根据解码轨迹与原始船舶轨迹间的差异来调整GRU自编码的参数,使得解码轨迹尽可能地接近原始船舶轨迹,由于此时可以从深度特征中完全还原出原始船舶轨迹,故认为此时提取的深度特征是合理的。其二是深度特征的聚类和船舶航线的生成,该过程利用DBSCAN算法对船舶轨迹的深度特征进行聚类,并将聚类后的类簇中心通过训练后的解码器解码反生成船舶航线。
1.1 门控循环单元
门控循环单元(gate recurrent unit, GRU)是由Cho等[23-24]在2014年提出的一种特殊类型的循环神经网络(recurrent neural networks, RNN),它旨在解决标准RNN中出现的梯度消失问题。GRU的功能类似于著名的LSTM网络,不同之处在于,GRU中只存在两个门,比LSTM少一个门,因此GRU中包含的参数更少,训练速度更快,使用的内存更少。GRU利用重置门和更新门来解决梯度消失问题,这些门能够长时间保存信息,而不会在一段时间内丢失信息 [25]。GRU单元的图形表示如图2所示。
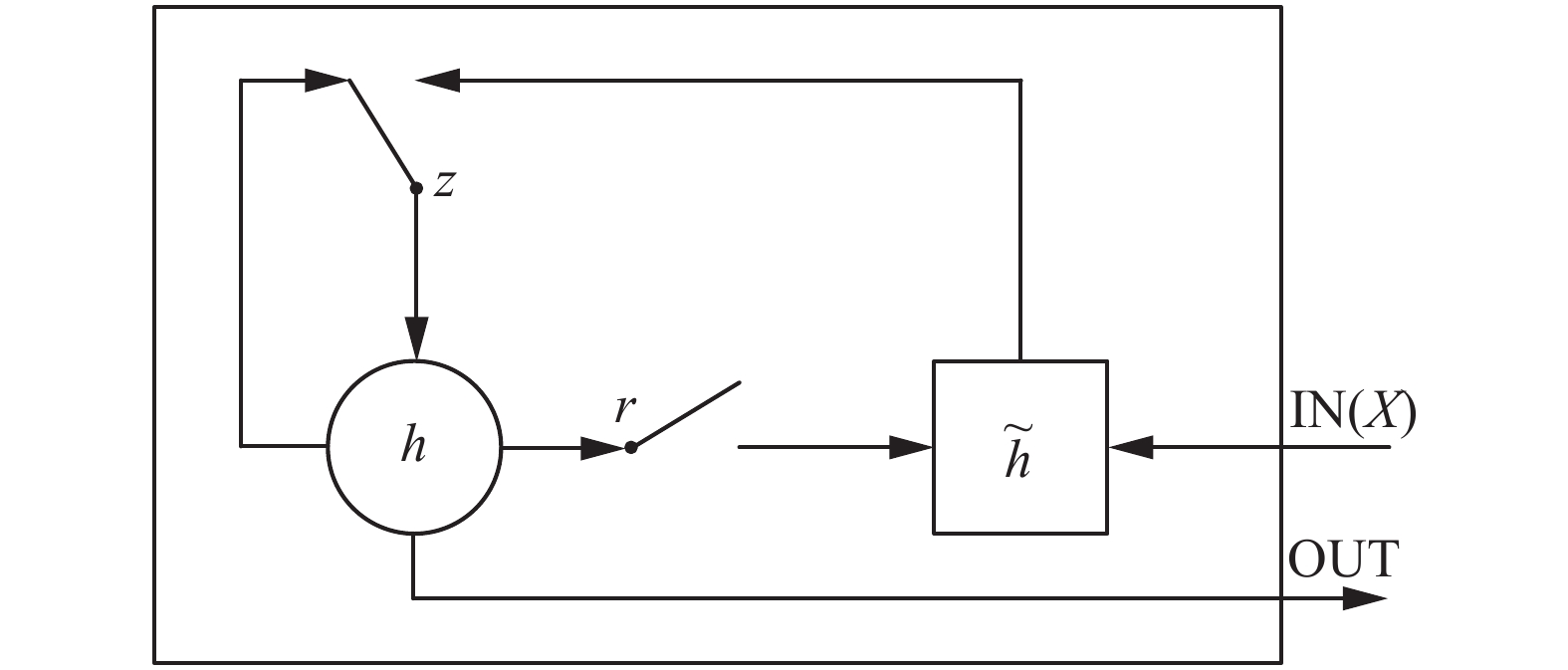 图 2 门控循环单元(GRU)Fig. 2 Gate recuurent unit (GRU)下载:
全尺寸图片
图 2 门控循环单元(GRU)Fig. 2 Gate recuurent unit (GRU)下载:
全尺寸图片
更新门决定了有多少过去的信息应该被传递到之后的模型中:
$$ {{\boldsymbol{z}}_{{t}}} = \sigma \left( {{{\boldsymbol{W}}_{{z}}}{{\boldsymbol{x}}_{{t}}} + {{\boldsymbol{U}}_{{z}}}{{\boldsymbol{h}}_{{{t - 1}}}}} \right) $$ (1) 式中:
${{\boldsymbol{x}}_{{t}}}$ 为$ t $ 时刻的输入;${{\boldsymbol{h}}_{{{t - 1}}}}$ 保存了$ t - 1 $ 时刻的信息;${{\boldsymbol{x}}_{{t}}}$ 、${{\boldsymbol{h}}_{{{t - 1}}}}$ 分别与权重矩阵${{\boldsymbol{W}}_{{z}}}$ 、${{\boldsymbol{U}}_{{z}}}$ 相乘并经过激活函数后得到更新门在$ t $ 时刻的输出${{\boldsymbol{z}}_{{t}}}$ 。GRU利用重置门来决定有多少过去的信息需要被遗忘,其输出表达式与更新门类似:
$$ {{\boldsymbol{r}}_{{t}}} = \sigma \left( {{{\boldsymbol{W}}_{{r}}}{{\boldsymbol{x}}_{{t}}} + {{\boldsymbol{U}}_{{r}}}{{\boldsymbol{h}}_{{{t - 1}}}}} \right) $$ (2) 当前记忆内容利用重置门来存储与过去相关的信息:
$$ {{{\tilde {\boldsymbol{h}}}}_{{t}}} = \tanh \left( {{\boldsymbol{W}}{{\boldsymbol{x}}_{{t}}} + {{\boldsymbol{r}}_{{t}}} \odot {\boldsymbol{U}}{{\boldsymbol{h}}_{{{t - 1}}}}} \right) $$ (3) 当前时间最终记忆内容会保留当前单元的信息并传递到下一个单元中:
$$ {{\boldsymbol{h}}_{{t}}} = {{\boldsymbol{z}}_{{t}}} \odot {{\boldsymbol{h}}_{{t}}} + \left( {1 - {{\boldsymbol{z}}_{{t}}}} \right) \odot {{{\tilde {\boldsymbol{h}}}}_{{t}}} $$ (4) 在该过程中需要使用更新门,它决定了当前记忆内容
${{{\tilde {\boldsymbol{h}}}}_{{t}}}$ 如何更新前一时刻的信息${{\boldsymbol{h}}_{{{t - 1}}}}$ 。1.2 GRU自编码器
本文利用GRU自编码器来重建预处理后的轨迹序列,并产生每条轨迹的固定长度的深度特征。自编码器模型由两个GRU网络组成,包括图3中左边所展示的编码器GRU部分以及右边所展示的解码器GRU。
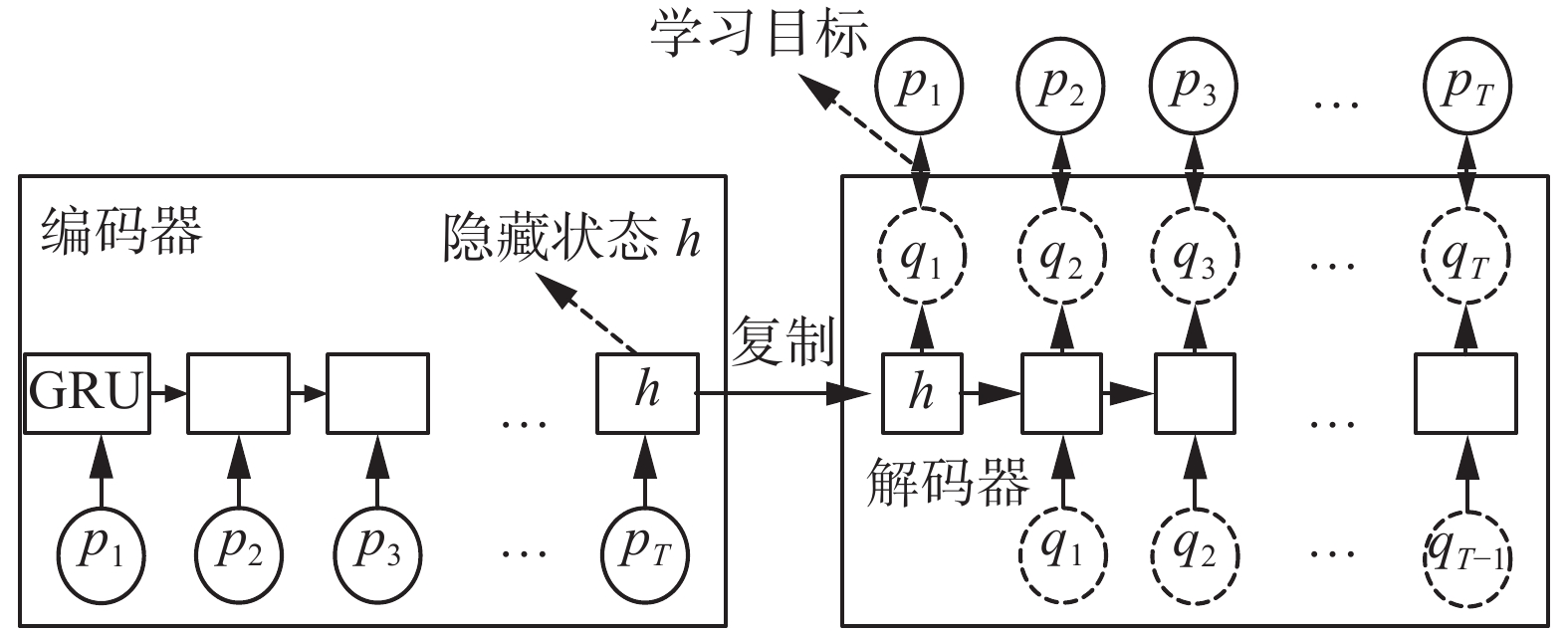 图 3 自编码器结构Fig. 3 Auto-encoder structure下载:
全尺寸图片
图 3 自编码器结构Fig. 3 Auto-encoder structure下载:
全尺寸图片
该模型的输入是轨迹序列
${{\rm{TR}}_i} = \left\{ {{p_1},{p_2}, \cdots ,{p_T}} \right\}$ ,当最后的${{\boldsymbol{p}}_{{T}}}$ 被处理后,编码器的隐藏状态${\boldsymbol{h}}$ 被用来作为整个轨迹序列的深度特征。$$ {\boldsymbol{h}} = {{\rm Encoder} _{\rm GRU}}\left( {\rm TR} \right) $$ (5) $$ {\boldsymbol{q}} = {{\rm Decoder} _{\rm GRU}}\left( {\boldsymbol{h}} \right) $$ (6) 解码器将
${\boldsymbol{h}}$ 作为初始隐藏状态,产生输出${{\boldsymbol{q}}_{{1}}}$ ,并进一步产生$\left( {{{\boldsymbol{q}}_{{2}}},{{\boldsymbol{q}}_{{3}}}, \cdots ,{{\boldsymbol{q}}_{{T}}}} \right)$ ,它的目标是重建输入轨迹序列${{\rm{TR}}_i}$ 。通过最小化重建误差,编码器GRU和解码器GRU被放在一起进行训练,其中重建误差由均方误差产生:$$ {\rm MSE} = \sum_{t = 1}^T {{{\left\| {{{\boldsymbol{p}}_{{t}}} - {{\boldsymbol{q}}_{{t}}}} \right\|}^2}} $$ (7) 固定长度的深度特征
${\boldsymbol{h}}$ 是输入轨迹序列${{\rm{TR}}_i}$ 的合理表示,因为利用解码器可以从${\boldsymbol{h}}$ 中重建整个输入轨迹序列。将深度特征作为DBSCAN聚类算法的输入,选择欧氏距离作为距离度量方法,得到聚类结果。1.3 航线提取
经过DBSCAN聚类,得到不同的轨迹簇。对于某一个轨迹簇,取其中的核心对象集合为
$ {C^i} $ ,将对象集合的中心作为航线的深度特征:$$ {\boldsymbol{h}}_{{\text{route}}}^i = \sum\limits_{{h_m} \in {C^i}} {{{\boldsymbol{h}}_m}} $$ (8) 将
${\boldsymbol{h}}_{{\text{route}}}^i$ 作为GRU自编码器中训练得到的解码器的输入,对类簇的聚类中心进行解码反演生成对应的航线。$$ {{\rm{TR}}_{{\rm{route}}}} = {{\rm Decoder} _{\rm GRU}}\left( {{\boldsymbol{h}}_{{\rm{route}}}^i} \right) $$ (9) 2. 实验及结果分析
2.1 实验一:利用模拟数据测试算法的合理性
在仿真数据中,基于3条不同形状的航线,包括直线型航线、曲线型航线及椭圆形航线,通过添加一定的噪声,并且将轨迹的长度取为50~100的随机值,以此生成30条模拟轨迹,如图4(a)所示,其中红色曲线为预设航线,绿色曲线为合成轨迹。
 图 4 合成轨迹与生成航线Fig. 4 Synthetic trajectories and generated routes下载:
全尺寸图片
图 4 合成轨迹与生成航线Fig. 4 Synthetic trajectories and generated routes下载:
全尺寸图片
本次实验中将GRU自编码器的隐藏层大小设置为30,学习率设为0.0001,迭代次数设为1000。经过DBSCAN算法聚类后,得到3个轨迹聚类簇并生成相应的航线,如图4(b)所示,其中3种不同颜色的曲线代表3个不同的轨迹簇,蓝色曲线代表生成航线。对比生成航线与预设航线可以看出,本文算法所提取的航线与实际航线基本一致,且由于合成轨迹的长度并不相同,这说明本文算法适用于实际中不同长度的船舶运动轨迹聚类,免去了传统轨迹聚类中定义不同长度轨迹间距离度量的步骤。
2.2 实验二:采用实际数据验证算法的效能
该实验在真实数据集中测试本文算法,研究区域选择美国波士顿港口附近海域。波士顿港是美国马萨诸塞州波士顿的一座港口,位于波士顿湾之内,是马萨诸塞州规模最大的港口,也是美国东海岸的主要港口之一。研究数据采用海洋能源管理局(BOEM)和美国国家海洋与大气管理局(NOAA)提供的2018年AIS数据,如图5所示。
 图 5 研究区域及研究数据Fig. 5 Research area and data下载:
全尺寸图片
图 5 研究区域及研究数据Fig. 5 Research area and data下载:
全尺寸图片
2.2.1 轨迹预处理
AIS数据中包含众多与船舶运动相关的信息,包括船舶的水上移动业务标识(maritime mobile service identify, MMSI)、所处的经纬度、航向和航速等信息。考虑具有不同MMSI标识的船舶目标集合
$ O = \left\{ {{o_1},{o_2}, \cdots ,{o_L}} \right\} $ ,对每个目标$ o $ ,它的历史AIS数据按时间排序后形成序列${S_{ o}} = \{ {p_1},{p_2}, \cdots , {p_n} \}$ 。对于轨迹序列${S_{ o}}$ ,即使它是来自同一艘船的轨迹,也会有不同航次的轨迹的区别,而不同航次的轨迹应被认为是不同的轨迹。为区分不同航次的轨迹,利用时间和速度阈值对轨迹序列进行预处理,得到处理后的轨迹集合${\text{T}}{{\text{R}}_S} = \{ {\text{T}}{{\text{R}}_{\text{1}}}{\text{,}} {{\text{TR}}_{\text{2}}}{\text{,}} \cdots, {\text{T}}{{\text{R}}_N} \}$ ,由于后续将对轨迹中包含的空间信息进行处理,故保留各轨迹点的经纬度信息,即${\text{T}}{{\text{R}}_i} = \left\{ {\left( {{\text{lo}}{{\text{n}}_{\text{1}}}{\text{,la}}{{\text{t}}_{\text{1}}}} \right){\text{,}}\left( {{\text{lo}}{{\text{n}}_{\text{2}}}{\text{,la}}{{\text{t}}_{\text{2}}}} \right), \cdots ,\left( {{\text{lo}}{{\text{n}}_m},{\text{la}}{{\text{t}}_m}} \right)} \right\}$ 。对波士顿港口附近的AIS数据进行预处理,其中时间阈值取为30 min,速度阈值取为0.5 kn,如图6所示,经过预处理后不同航次的轨迹被明显地区分开来。
 图 6 预处理前后的轨迹Fig. 6 Trajectories before and after preprocessing下载:
全尺寸图片
图 6 预处理前后的轨迹Fig. 6 Trajectories before and after preprocessing下载:
全尺寸图片
2.2.2 轨迹聚类及航线提取
预处理后一共形成918条轨迹,将轨迹作为输入。将自编码器的隐藏层大小设置为100,学习率为0.0001,迭代次数设为3000。经过训练后,918条不同长度的轨迹被统一编码为长度为100的深度表示,利用DBSCAN算法对其进行聚类,经过反复实验,将密度半径设为0.8,密度阈值设为5,此时聚类效果最佳,去除不在主要路线上的噪声轨迹后一共得到16个轨迹簇,如图7所示。
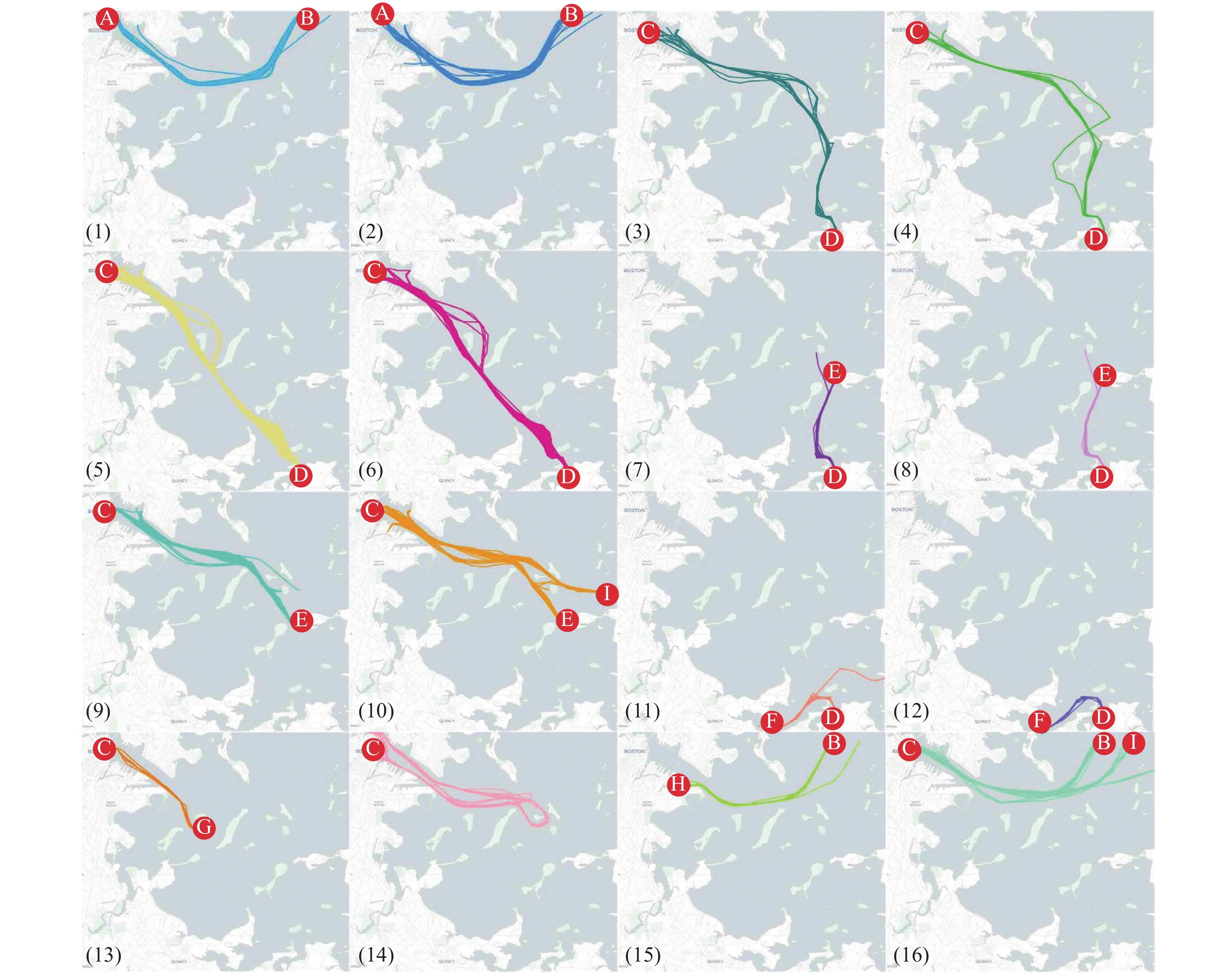 图 7 轨迹聚类后形成的不同轨迹簇Fig. 7 Different trajectory clusters after trajectory clustering下载:
全尺寸图片
图 7 轨迹聚类后形成的不同轨迹簇Fig. 7 Different trajectory clusters after trajectory clustering下载:
全尺寸图片
分析聚类后的16个轨迹簇可知,该区域内船舶运动的起点和终点主要包括图7中A~G共7个位置,其中A、B为进出目标区域的地点,C~G为不同城市。由于运动方向相反,运动形状相似的轨迹簇被认为是不同的轨迹簇。例如图7中轨迹簇(1)和(2),簇(1)由A点出发运动到B点,而簇(2)由B点出发运动到A点。轨迹簇(3)(4)、(5)(6)、(7)(8)、(9)(10)和(11)(12)同样具有运动方向相反的特征。在16个轨迹簇中,大部分簇内的轨迹具有相同且唯一的起点和终点,而对于簇(10)和(16),它们存在两个不同的起点,导致该现象的原因可能是AE (auto encoder)结构中的编码器没有很好地区分这两种起点不同的轨迹,使得两种轨迹的深度特征间距离相近,因而在聚类过程中被认为是同一类轨迹。
通过统计各个不同轨迹簇内的船舶类型可知,经过实验区域且不做停留的轨迹簇(1)(2)中主要包括拖船和领航船,而起点和终点均在实验区域内的轨迹簇(3)~(14)主要包括的是客船的轨迹。客船在城市C、D、E、F间航行,其中城市C、D之间的客船流量最大,且往返间具有两条明显不同的航线,见图7中轨迹簇(3)(4)(5)(6)。
由以上分析可知,聚类后各轨迹簇在轨迹形状、方向和船舶类型等特征上各不相同,这说明利用船舶轨迹的深度表示对轨迹进行聚类具有较好的效果。对聚类后的每个轨迹簇,计算其在深度空间中的中心,并通过解码器生成对应的航线,如图8所示。
 图 8 航线提取Fig. 8 Route extraction下载:
全尺寸图片
图 8 航线提取Fig. 8 Route extraction下载:
全尺寸图片
图8中航线的宽度代表了通过该航线的船舶流量,其中航线(5)和(6)流量最大,其余航线流量相近。对比图7与图8可知,提取的航线在整体上较好地体现了各轨迹簇在空间上的长度、方向、位置和形状等特征,这说明了航线的合理性。
2.2.3 实验结果对比
本文方法与相关论文航线提取方法(Hausdorff[21]、DTW[20]、三角网[11])进行对比分析,其处理结果如图9所示。
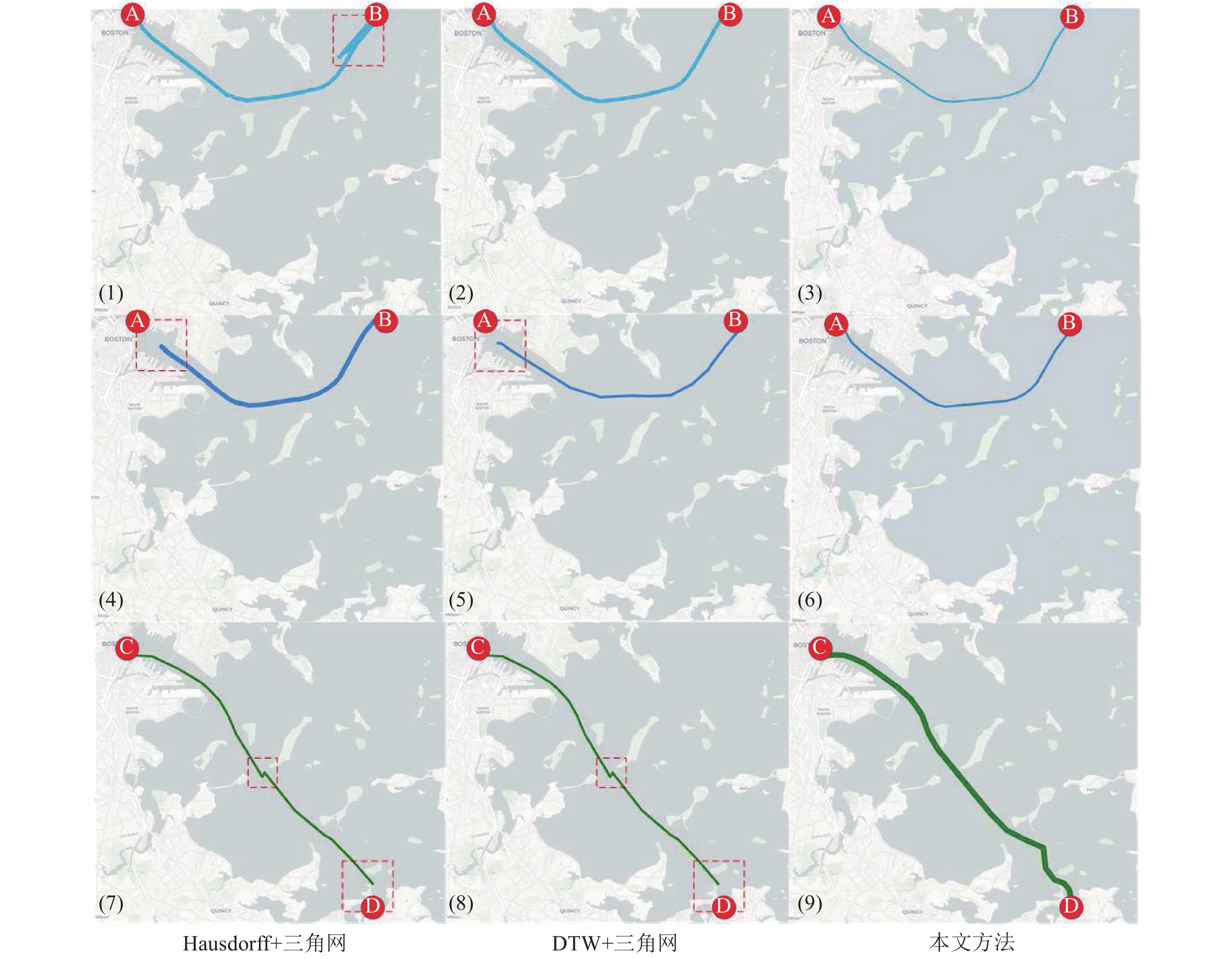 图 9 不同航线提取方法对比Fig. 9 Comparison of different route extraction methods下载:
全尺寸图片
图 9 不同航线提取方法对比Fig. 9 Comparison of different route extraction methods下载:
全尺寸图片
图9中基于Hausdorff距离的聚类无法分辨出相同路径上不同航向的轨迹,需进行一定的后处理;而利用三角网提取的航线均存在以下缺点,即起点或终点不明确、存在航线折返、航线不平滑等。
对此,本文还提出航线评价的量化指标,即整体轨迹与航线间的平均距离:
$$ {D_{{\rm{avg}}}} = \frac{1}{N}\sum\limits_{i = 1}^N {{\rm{DIS}}\left( {{{\rm{TR}}_i},{{\rm{Route}}_j}} \right)} $$ (10) 式中:
${D_{{\rm{avg}}}}$ 为平均距离,${D_{{\rm{avg}}}}$ 越小说明航线提取越准确DIS (DIS_Hausdorff/DIS_DTW)为轨迹相似性度量方法;${{\rm{Route}}_j}$ 为与轨迹${{\rm{TR}}_i}$ 最近的航线。不同方法的对比结果如表1所示,可以看出本文方法在两种度量方法下的性能均优于传统方法。表 1 航线提取效果对比Table 1 Route-extraction effect comparison方法 Davg DIS_Hausdorff DIS_DTW Hausdorff 0.01486 0.25429 DTW 0.01469 0.30066 本文方法 0.01336 0.17429 3. 结束语
本文提出了一种基于GRU自编码器的船舶航线提取方法,通过深度学习的GRU自编码器进行AIS数据的深度特征信息提取。在实验一中,基于合成数据集测试验证了航线提取算法的有效性以及对不同长度轨迹的适应性;在实验二中,采用波士顿港附近海域2018年内的AIS数据,利用时间和速度阈值对不同航次的轨迹进行分割与预处理,采用GRU自编码器将船舶轨迹编码为固定长度的深度表示,并在深度空间中利用DBSCAN算法对船舶轨迹进行聚类,共得到16个轨迹簇,通过航线提取算法得到研究区域内的16条航线,对比原始数据与所提取的航线,表明了本文方法可以有效地进行海量船舶航行数据挖掘,提取不同模式下船舶的轨迹航线。本文方法对比传统航线提取方法具有精确提取和无需后处理的优点,且同时可以提取出各航线的船舶流量和船舶类型等有价值的信息,为后续目标区域内的船舶路径规划、异常检测和位置预测等研究与应用打下了基础。
-
图 1 利用AIS数据的船舶航线提取流程
Fig. 1 Ship route extraction process using AIS data
下载:
全尺寸图片
图 2 门控循环单元(GRU)
Fig. 2 Gate recuurent unit (GRU)
下载:
全尺寸图片
图 3 自编码器结构
Fig. 3 Auto-encoder structure
下载:
全尺寸图片
图 4 合成轨迹与生成航线
Fig. 4 Synthetic trajectories and generated routes
下载:
全尺寸图片
图 5 研究区域及研究数据
Fig. 5 Research area and data
下载:
全尺寸图片
图 6 预处理前后的轨迹
Fig. 6 Trajectories before and after preprocessing
下载:
全尺寸图片
图 7 轨迹聚类后形成的不同轨迹簇
Fig. 7 Different trajectory clusters after trajectory clustering
下载:
全尺寸图片
图 8 航线提取
Fig. 8 Route extraction
下载:
全尺寸图片
图 9 不同航线提取方法对比
Fig. 9 Comparison of different route extraction methods
下载:
全尺寸图片
表 1 航线提取效果对比
Table 1 Route-extraction effect comparison
方法 Davg DIS_Hausdorff DIS_DTW Hausdorff 0.01486 0.25429 DTW 0.01469 0.30066 本文方法 0.01336 0.17429 -
[1] 徐良坤, 任律珍, 周世波. 船舶AIS轨迹聚类方法研究进展综述[J]. 广州航海学院学报, 2019, 27(2): 7–12,47. doi: 10.3969/j.issn.1009-8526.2019.02.002 XU Liangkun, REN Lvzhen, ZHOU Shibo. Research progress on clustering AIS trajectory of vessels[J]. Journal of Guangzhou Maritime University, 2019, 27(2): 7–12,47. doi: 10.3969/j.issn.1009-8526.2019.02.002 [2] 马俊, 董良雄, 李军. 一种基于K-means改进蚁群算法的船舶航线设计方法[J]. 中国修船, 2020, 33(3): 38–41. doi: 10.13352/j.issn.1001-8328.2020.03.009 MA Jun, DONG Liangxiong, LI Jun. Method for designing ship routes based on improved ant colony algorithm of K-means[J]. China shiprepair, 2020, 33(3): 38–41. doi: 10.13352/j.issn.1001-8328.2020.03.009 [3] 陈晓, 戴冉, 赵延鹏, 等. 基于鱼群算法的船舶避浅航线设计[J]. 中国航海, 2019, 42(3): 95–99,120. doi: 10.3969/j.issn.1000-4653.2019.03.018 CHEN Xiao, DAI Ran, ZHAO Yanpeng, et al. Ship route planning to avoid shallow waters with artificial fish swarm algorithm[J]. Navigation of China, 2019, 42(3): 95–99,120. doi: 10.3969/j.issn.1000-4653.2019.03.018 [4] HE Yankang, ZHANG Di, ZHANG Jinfen, et al. Ship route planning using historical trajectories derived from AIS data[J]. TransNav: the international journal on marine navigation and safety of sea transportation, 2019, 13(1): 69–76. doi: 10.12716/1001.13.01.06 [5] 陈立家, 黄立文, 崔梅. 基于改进蚁群算法的船舶多约束最优航线设计[J]. 上海海事大学学报, 2017, 38(4): 11–15. doi: 10.13340/j.jsmu.2017.04.003 CHEN Lijia, HUANG Liwen, CUI Mei. Optimal ship route planning with multiple constraints based on improved ant colony algorithm[J]. Journal of Shanghai Maritime University, 2017, 38(4): 11–15. doi: 10.13340/j.jsmu.2017.04.003 [6] GRINYAK V M, SHULENINA A V, IVANENKO Y S. Ship routes planning based on traffic clustering[J]. Journal of physics:conference series, 2021, 1864(1): 012080. doi: 10.1088/1742-6596/1864/1/012080 [7] 韩志豪, 汪益兵, 张宇, 等. 基于深度强化学习的船舶航线自动规划[J]. 中国航海, 2021, 44(1): 100–105. doi: 10.3969/j.issn.1000-4653.2021.01.017 HAN Zhihao, WANG Yibing, ZHANG Yu, et al. Automatic ship route planning based on deep reinforcement learning[J]. Navigation of China, 2021, 44(1): 100–105. doi: 10.3969/j.issn.1000-4653.2021.01.017 [8] 龚铭凡, 徐海祥, 冯辉, 等. 基于改进蚁群算法的智能船舶路径规划[J]. 武汉理工大学学报(交通科学与工程版), 2020, 44(6): 1072–1076. GONG Mingfan, XU Haixiang, FENG Hui, et al. Intelligent ship path planning based on improved ant colony algorithm[J]. Journal of Wuhan University of Technology (transportation science & engineering edition), 2020, 44(6): 1072–1076. [9] 姚肖肖, 胡勤友, 杨春. 基于蚁群算法与海量AIS数据的船舶航线规划[J]. 交通信息与安全, 2019, 37(3): 79–85. doi: 10.3963/j.issn.1674-4861.2019.03.010 YAO Xiaoxiao, HU Qinyou, YANG Chun. Route planning of vessels with ant colony algorithm and massive AIS data[J]. Journal of transport information and safety, 2019, 37(3): 79–85. doi: 10.3963/j.issn.1674-4861.2019.03.010 [10] 杨令省. 船舶航线规划中的精确控制算法研究[J]. 舰船科学技术, 2017, 39(8): 85–87. doi: 10.3404/j.issn.1672-7649.2017.08.018 YANG Lingxing. Research on precise control algorithm in ship route planning[J]. Ship science and technology, 2017, 39(8): 85–87. doi: 10.3404/j.issn.1672-7649.2017.08.018 [11] 王加胜, 刘永学, 杨昆, 等. 基于空间聚类分析的南海主要航线提取方法[J]. 交通运输工程学报, 2016, 16(6): 91–98. doi: 10.3969/j.issn.1671-1637.2016.06.011 WANG Jiasheng, LIU Yongxue, YANG Kun, et al. Extraction method of main routes in South China Sea based on spatial cluster analysis[J]. Journal of traffic and transportation engineering, 2016, 16(6): 91–98. doi: 10.3969/j.issn.1671-1637.2016.06.011 [12] HALPERN B S, WALBRIDGE S, SELKOE K A, et al. A global map of human impact on marine ecosystems[J]. Science, 2008, 319(5865): 948–952. doi: 10.1126/science.1149345 [13] LIN Dong. Spatial analysis of ship routes for maritime security and safe navigation[D]. Halifax: Dalhousie University, 2008. [14] WANG Jiasheng, LI Manchun, LIU Yongxue, et al. Safety assessment of shipping routes in the South China Sea based on the fuzzy analytic hierarchy process[J]. Safety science, 2014, 62: 46–57. doi: 10.1016/j.ssci.2013.08.002 [15] YAO Di, ZHANG Chao, ZHU Zhihua, et al. Trajectory clustering via deep representation learning[C]//2017 International Joint Conference on Neural Networks (IJCNN). Anchorage: IEEE, 2017: 3880−3887. [16] LEE J G, HAN Jiawei, WHANG K Y. Trajectory clustering: a partition-and-group framework[C]//SIGMOD’07: Proceedings of the 2007 ACM SIGMOD International Conference on Management of Data. New York: ACM, 2007: 593−604. [17] PALLOTTA G, VESPE M, BRYAN K. Vessel pattern knowledge discovery from AIS data: a framework for anomaly detection and route prediction[J]. Entropy, 2013, 15(12): 2218–2245. doi: 10.3390/e15062218 [18] PALLOTTA G, VESPE M, BRYAN, K. Traffic route extraction and anomaly detection (TREAD): vessel pattern knowledge discovery and exploitation for maritime situational awareness[J]. Ref, 2012, 37(4): 37–44. [19] PALLOTTA G, VESPE M, BRYAN K. Traffic knowledge discovery from AIS data[C]//Proceedings of the 16th International Conference on Information Fusion. Istanbul: IEEE, 2013: 1996−2003. [20] DE VRIES G, SOMEREN M. Unsupervised ship trajectory modeling and prediction using compression and clustering[C]//Proceedings of the 18th Annual Belgian-Dutch Conference on Machine Learning. Tilburg: [s.n.], 2009: 7−12. [21] WANG Lianhui, CHEN Pengfei, CHEN Linying, et al. Ship AIS trajectory clustering: an HDBSCAN-based approach[J]. Journal of marine science and engineering, 2021, 9(6): 566. doi: 10.3390/jmse9060566 [22] COELHO DA SILVA T L, ZEITOUNI K, DE MACÊDO J A F. Online clustering of trajectory data stream[C]//2016 17th IEEE International Conference on Mobile Data Management. Porto: IEEE, 2016: 112−121. [23] CHO K, VAN MERRIENBOER B, GULCEHRE C, et al. Learning phrase representations using RNN encoder-decoder for statistical machine translation[EB/OL]. (2014−09−03)[2021−07−06].https://arxiv.org/abs/1406.1078. [24] CHO K, VAN MERRIËNBOER B, BAHDANAU D, et al. On the properties of neural machine translation: Encoder-decoder approaches[EB/OL]. (2014−10−07)[2021−07−06].https://arxiv.org/abs/1409.1259. [25] CHUNG J, GULCEHRE C, CHO K, et al. Empirical evaluation of gated recurrent neural networks on sequence modeling[EB/OL]. (2014−12−11)[2021−07−06].https://arxiv.org/abs/1412.3555.












































