
Doppler positioning inversion model of a satellite-based data collection system
-
摘要: 针对星基Argo数据收集系统(data collection system, DCS)浮漂多普勒位置反演的应用需求,通过对地球表面约束、数字高程约束两种模型在实际应用中的收敛性能分析,给出面向海洋特色应用的缺省高度约束的位置反演算法,并建立了算法精度分析评估模型。基于此模型实现了对观测样本特征、星上时标精度等浮标采集位置反演影响因子的有效分析,从而为星基Argo数据采集系统下行数据位置反演算法优化、星上载荷设计优化及大星基信息采集系统建设提供理论参考。Abstract: To meet the practical application requirements of the floating Doppler position inversion of a space-based Argo data collection system (DCS) using the convergence performance analysis of two models of earth surface and digital elevation constraints, this study proposes a position inversion algorithm with a default height constraint for marine characteristic applications. Moreover, an algorithm accuracy analysis and an evaluation model are established. Based on this model, the influencing factors of the data retrieval of buoys—including the observation sample characteristics and accuracy of the time scale on the satellite—are effectively analyzed. The results provide a theoretical reference for the algorithm optimization of the downlink data position inversion, design optimization of onboard loads, and construction of a large satellite-based information acquisition system.
-
星基数据收集系统(data collection system,DCS),是一种装备于卫星端的有效载荷,其主要功能为借助卫星广域探测能力接收从地面可视范围内平台发射器终端(platform transmitter terminal,PTT)播发微波信号并提取出相关传感器实时测量数据的星地一体化应用系统。该系统以其全天时、全球覆盖能力,被广泛应用于海洋运输[1]、海洋观测[2-4]及地球生态[5-6]等领域。该系统的典型应用为法国国家空间研究中心、美国国家海洋大气局和美国国家航天局合作建设的卫星数据搜集和定位系统,简称Argos系统[7]。全球海洋1500台漂流浮标、800多个次表层浮标、80多台深海锚系浮标和300多台沿岸锚系浮标装载了Argos发射机,通过Argos系统搜集并传输数据,形成了大量数据分析成果[8-10]。
我国海洋动力学(海洋二号)卫星[11]也装备了针对Argos体制的PTT信号收集载荷,对全球海洋浮标位置进行长期监视以达到追踪洋流长期状态的应用效果。但作为一种信息透传系统,除PTT自身编号信息固定外,其余内部信息格式不同国家、单位均不透明。因此,无论PTT自身是否装配了GPS定位模块,对于非自主投放的PTT而言,均无法通过数据解析的方式获得其位置信息。只能将通过载荷对测量载波本身的多普勒频率偏移值作为测距信息,伴随卫星时标及卫星自身定位结果回传地面站,再经过定位反演算法解算浮标位置方可实现对PTT位置信息的有效获取[12-15]。
国内外学者针对基于多普勒测量的位置反演方法进行了建模研究。FENG等[16]对单星多普勒位置反演误差模型进行了推导,论证了卫星与浮标之间的相对位置关系、信号测量频度、空间噪声环境等因素对PTT位置反演精度带来的影响。AHMED等[17-18]从测量信号到达时间差(time difference of arrival,TDOA)的研究角度,对测量时间误差对源端定位的影响进行了建模分析。本文结合海洋动力学卫星在轨实测数据,针对传统的最小二乘反演模型以增加约束的角度改善算法收敛效能,在PTT位置追踪应用的背景下,以牺牲高度反演信息的方式给出了一种快速反演约束算法,改善了传统反演算法在单星测量数据条件下收敛精度低甚至不收敛的问题。
1. PTT位置反演算法原理
PTT位置反演原理采用基于多普勒频移的单点定位方法,借助PTT信号导频段单载波信号,星上数据收集载荷进行锁相跟踪并以固定时间间隔输出多普勒测量值,借助卫星过境弧段多次测量形成几何分布并实现位置反演,如图1所示。
 图 1 PTT位置反演原理示意图Fig. 1 PTT position inversion principle diagram
图 1 PTT位置反演原理示意图Fig. 1 PTT position inversion principle diagram 下载:
全尺寸图片
下载:
全尺寸图片
宋叶志等[19]利用牛顿迭代算法原理给出一种基于最小二乘法的PTT定位算法,可实现对PTT位置及频率的解算。
$$ {F_j} = f[1 - \frac{{(v_s^j - {v_b}) \cdot (r_s^j - {r_b})}}{{\left| {r_s^j - {r_b}} \right|}}] + \varepsilon $$ (1) 式中:
$ {F_j} $ 为卫星$ j $ 时刻测量到的频率;$ f $ 为发射频率;$ v_s^j $ 为卫星$ j $ 时刻速度;$ {v_b} $ 为PTT的速度;$ r_s^j $ 为卫星$ j $ 时刻位置;$ {r_b} $ 为PTT的位置,坐标系为惯性系;$ \varepsilon $ 为测量噪声。定义
$ \dot \rho $ 为每次测量的距离变化率,且令$$ \dot \rho = \frac{{(v_s^j - v_b^j) \cdot (r_s^j - {r_b})}}{{\left| {r_s^j - {r_b}} \right|}} + \varepsilon $$ (2) 式中
$ v_b^j $ 为当次估计的PTT速度,则式(1)可简化为$$ {F_j} = f(1 - \dot \rho ) + \varepsilon $$ (3) 若进一步对式(2)进行简化,令
$$ \Delta = \left[ {\begin{array}{*{20}{c}} {{r_{sx}}} \\ {{r_{sy}}} \\ {{r_{sz}}} \end{array}} \right] - \left[ {\begin{array}{*{20}{c}} {{r_{bx}}} \\ {{r_{by}}} \\ {{r_{bz}}} \end{array}} \right] $$ (4) 式中:
$ {r}_{sx}、{r}_{sy}、{r}_{sz} $ 分别为卫星在收到信号时刻的位置(轨道参数),为已知量;而$ {r}_{bx}、{r}_{by}、{r}_{bz} $ 为当前时刻PTT的位置量,为待估计量。因此,将卫星过境时每次测量到的
$ {F_j} $ 和卫星测量时刻位置$ {r}_{sx}、{r}_{sy}、{r}_{sz} $ 作为已知量,并代入式(3)形成超定方程,即可通过设置合理的收敛结束判据(如连续5次迭代误差小于某门限值),利用最小二乘法进行参数估计对$ {r_{bx}}{\text{、}}{r_{by}}{\text{、}}{r_{bz}} $ 进行解算。其最小二乘解可以定义为$$ \Delta {\boldsymbol{Y}} = {({{\boldsymbol{H}}^{\rm{T}}}{\boldsymbol{H}})^{ - 1}}({{\boldsymbol{H}}^{\rm{T}}}y) $$ (5) 式中:
$ \Delta {\boldsymbol{Y}} $ 为包含$ {r}_{bx}、{r}_{by}、{r}_{bz} $ 和发射频率$ f $ 的待估计参数修正量;$ {\boldsymbol{H}} $ 为包含$ {r}_{sx}、{r}_{sy}、{r}_{sz} $ 、$ {F_j} $ 的观测矩阵,其维度视观测次数而定;$ y $ 为测量残差。2. 算法改进及约束设置
由于单颗海洋卫星过顶次数有限,单次过顶测量数据量极少(仅3~5次),且所形成的超定方程组线性度较高,模型式(5)往往很难有效收敛。在不进行约束改进的情况下,传统的PTT位置反演模型几乎无法实现有效收敛。
因此,为提高算法收敛能力,必须引入部分约束条件使三维观测量减小。在文献[19]中,给出了以下2种约束模型,并对改进模型进行了理论推导,具体约束设置为:
1)结合数字高程,将高度参数
$ {r_{bz}} $ 用数字高程图进行拟合约束计算;2)结合地球表面方程,将高度参数
$ {r_{bz}} $ 用椭球方程进行约束计算。值得一提的是,上述约束均基于位置反演结果中的高度参数
$ {r_{bz}} $ 进行替换计算。2.1 基于数字高程约束的PTT位置反演算法
引入数字高程约束[20],将
$ {r_b} $ 表示成大地坐标$ \lambda$ 、$ \varphi $ 、$ h $ 形式,其中大地高度可以用数字高程给出:$$ \left\{ {\begin{array}{*{20}{c}} {{x_{\text{b}}} = (N + h)\cos \lambda \cos (\varphi + g){\text{ }}} \\ {{y_{\text{b}}} = (N + h)\cos \lambda \sin (\varphi + g){\text{ }}} \\ {{z_{\text{b}}} = [N(1 - {e^2}) + h]\cos (\varphi + g)} \end{array}} \right. $$ (6) 式中:
$ g $ 为恒星时;$ e $ 为地球扁率;$ N $ 可表示为$$ N = {R_e}{(1 - {e^2}{\sin ^2}\phi )^{\frac{1}{2}}} $$ (7) 式中
$ {R_e} $ 为地球半径。通过该约束,在对式(5)进行迭代运算的过程中,将
$ \Delta {\boldsymbol{Y}} $ 转换为与$ \lambda {\text{、}}\varphi {\text{、}}h $ 相关的变量,每次迭代获得的$ \lambda {\text{、}}\varphi {\text{、}}h $ 中将高程$ h $ 均使用数字高程图进行bspline拟合得到,进而修正直接迭代引入的误差,实现缩减观测参数下的快速收敛。2.2 基于地球表面约束的PTT位置反演算法
引入地球表面约束[21],将地球近似成椭球体,通过椭球方程将高度信息用精度、纬度信息进行换算,可有效减少一维观测量以实现快速收敛。
将地球表面近似为椭球面后,约束方程为
$$ \frac{{{x^2}}}{{{a^2}}} + \frac{{{y^2}}}{{{b^2}}} + \frac{{{z^2}}}{{{c^2}}} = 1 $$ (8) 式中:
$ a = b = 6\;378.140\;{\text{km}} $ ;$ c = 6\;356.755\;{\text{km}} $ 。这样仍可找出
$ {r_{bz}} $ 与$ {r_{bx}} $ 和$ {r_{by}} $ 的换算关系,再使用相同的计算方式在每次迭代过程中替换$ {r_{bz}} $ 以达到缩减观测参数的目的。3. 约束改进及误差评估分析
3.1 基于缺省高度约束的PTT位置反演算法
对于前面两种改进约束模型,其核心宗旨是在不丢失高度估计参数的基础上,使用数字高程或地球表面约束的方式规避迭代的累积误差。但由于数字高程拟合和地球表面约束模型本身同样存在一定程度的误差,该误差同样会在迭代过程中逐步放大,进而导致收敛效果变差的问题。
根据回归海洋卫星数据收集系统的应用需求,由于PTT位置反演主要用于海面PTT的位置追踪,进而获取洋流动态、鱼类迁徙等环境信息,并非高精密测高用途。为了不因引入约束造成算法二次误差累积,本文将高度参数直接置零处理,在最终迭代收敛后仅计算一次高度,其余模型保持不变,具体算法如下:
1)给定初值条件,高度h不参加参数估计;
2)计算观测量残差y和矩阵H;
3)将估计结果中的h清0(不参与迭代);
4)计算改正量
$\Delta {\boldsymbol{Y}}$ 和新的位置;5)如果新旧位置差小于一指定小量(如1 m),迭代完成,否则回到2)。
通过选择典型(固定浮标)浮标与不同算法反演结果进行逐个匹配给出测量误差的定量指标,并进行等级评估。各级误差等级如表1所示。
表 1 误差等级定义Table 1 Error level definition table误差等级 距离误差/km I级 d<1 II级 1<d<5 III级 5<d<10 IV级 10<d<100 V级 d>100 定义第
$ i $ 次迭代后收敛因子$ {P_{\text{c}}}^i $ 为其与上一次迭代结果矢量的欧氏距离,则其表达式为$$ {P_{\text{c}}}^i = \sqrt {\sum\limits_{k = 1}^m {{{({x_{i,k}} - {x_{i{\text{ - }}1,k}})}^2}} } $$ (9) 式中:
$ m $ 表示待估计参数的个数,在数字高程约束模型和地球表面约束模型,待估计参数分别为$ \lambda 、 $ $ \phi 、h $ 和$ {r}_{bx}、{r}_{by}、{r}_{bz} $ ,则$ m = 3 $ ;而对于缺省高度的模型,其待估计参数仅剩$ {r}_{bx}、{r}_{by} $ ,其$ m = 2 $ ;$ {x_{i,k}} $ 表示在第$ i $ 次迭代所得的第$ k $ 个待估计参数的估计值。定义收敛判据
$ {T_c} $ 的计算方式为$$ {T_c} = \frac{1}{t}\sum\limits_{i = s - t}^s {{P_c}^i} $$ (10) 式中:
$ s $ 为当前算法循环迭代的次数;$ t $ 为收敛判决窗口,即对连续$ t $ 次迭代效果进行评估。3.2 算法对比分析
针对基于数字高程约束的PTT位置反演算法和基于地球表面约束的PTT位置反演算法以及本节所设计的基于缺省高度约束的PTT位置反演算法进行对比测试。选用海洋二号B卫星在轨下行数据及Argos公开的真实PTT位置信息进行对比分析。用于对比测试的PTT共2 000个,均采用表1所述的等级定义作为位置反演精度评估标准,采用式(10)作为算法收敛判据,且设置判决窗口
$ t = 10 $ ,$ {T_c} = 1 \times {10^{ - 5}} $ 。3.2.1 数字高程约束PTT位置反演算法精度分析
在仿真过程中发现,2 000个PTT的定位结果均无法收敛至100 km以内。
该种现象的产生主要原因在于数字高程图的引入。虽然在一定程度上避免了传统算法中将地球近似看作椭球体的误差,但所采用的数字高程仅有0.5个经纬度的分辨率,必须进行双线性插值得到数字高程,这里引入了插值误差。此外,由于地固坐标系到纬经高坐标系的转换过程中,在
$ \lambda 、\phi $ 两个值的计算时同样存在误差的引入,且在迭代过程中又不断影响$ \lambda 、\phi $ 的计算结果。如此一来,该误差进一步扩大化,最终导致算法持续不断迭代但无法收敛的现象。3.2.2 地球表面约束PTT位置反演算法精度分析
算法在2 000个PTT的定位结果可以收敛,如图2所示:
 图 2 地球表面约束位置反演结果统计图Fig. 2 Statistical chart of inversion results by using constrained position on earth surface下载:
全尺寸图片
图 2 地球表面约束位置反演结果统计图Fig. 2 Statistical chart of inversion results by using constrained position on earth surface下载:
全尺寸图片
可见,2000个PTT的定位结果精度分布为0~100 km。
从表2可以看出,采用了地球表面约束的PTT位置反演收敛效果有所提升,但精度误差较大,究其原因主要是将地球表面近似于椭球表面产生了精度误差,并在每次迭代过程中不断进行误差累计所致。
表 2 地球表面约束反演精度个数统计表Table 2 Statistical table of the number of precision by using earth surface constrained inversion精度/ km 个数 0~1 174 1~5 312 5~10 209 10~100 1305 3.2.3 缺省高度约束PTT位置反演算法精度分析
通过对2 000个PPT的多普勒测量数据进行定位解算可实现较快收敛,如图3所示:
 图 3 缺省高度约束位置反演算法定位结果统计图Fig. 3 Statistical chart of positioning results by using default height constraint position inversion algorithm下载:
全尺寸图片
图 3 缺省高度约束位置反演算法定位结果统计图Fig. 3 Statistical chart of positioning results by using default height constraint position inversion algorithm下载:
全尺寸图片
可见,2 000个PTT定位结果精度在5 km以下。
根据表3中结果可得出,PTT定位精度在0~1 km的个数时总PTT个数的91.05%,PTT定位精度基本在0~1 km范围内,其精确度对于海洋观测而言具备可用性。
表 3 缺省高度约束定位精度个数统计表Table 3 Statistical table for the number of positioning accuracy by using default height constraint精度/km 个数 0~1 1821 1~5 179 从表3对比结果可以看出,引入数字高程约束和地球表面约束可保证反演结果中的高度信息不丢失。但由于单颗卫星采集样本规模及线性化特征的局限,算法出现不收敛或收敛结果差的问题,且随着约束模型的简化(与地球表面约束相比,数字高程约束更简化),算法性能有提升趋势。
进一步的,对于海洋类应用将高度信息忽略不计(缺省高度约束)的方式可有效实现km级PTT位置精度反演,该种方法虽然丢失了解算结果中的高度信息,但可有效实现PTT位置的追踪。
综上所述,面向洋流追踪等应用场景,在不考虑高度参数的情况下,采用缺省高度约束的PTT位置反演算法具有更好的收敛性能,能够满足海洋卫星应用需求。
4. 精度影响要素分析
结合海洋卫星应用特色,影响PTT位置反演精度的关键因素主要包括PTT信号测量资料的数据规模、测量资料对应的卫星空间几何分布、卫星时标的准确度。
1) 测量资料的规模,主要取决于星上DCS载荷对覆盖区域内的PTT型号捕获的能力;
2) 资料对应的卫星空间几何分布,主要取决于卫星的轨道特性,相同时间内,共视卫星数量越多、卫星几何分布越分散,其空间几何分布越好;
3) 卫星时标延时,主要取决于星上载荷在射频信号接收时刻,所获取的时标信息存在一定延时不确定性。
4.1 不同性质观测量对定位精度影响分析
对观测量性质的区分,包括观测量的规模和观测量的空间几何分布两方面,由于当前在轨卫星为单星(以海洋二号B卫星为例),考虑验证有效性,选择固定浮标(长时间不移动)多次过境拼接观测量的方式进行算法精度验证。
从下行数据样本中找出典型多轨多次观测示例,其观测量均大于3个轨道周期数据(模拟多星共视)且观测空间几何分布不同(模拟星座构型),进而开展精度分析如下。
1) 观测量规模对解算精度的影响
针对观测量的规模对定位精度的影响,将定位结果进行统计分析,见表4所示。
表 4 观测量规模对反演精度的影响对比Table 4 Comparison of the influence of observation scale on inversion accuracy观测量个数 精度平均值/m 8~20 784.3181 8~25 728.0463 8~30 666.8665 8~60 512.2173 8~90 339.7690 8~120 248.3083 可见,随着观测量个数的增大,解算精度逐渐提升,如图4所示。
 图 4 解算精度随观测量个数的变化情况Fig. 4 Variation of solution accuracy with the number of observations下载:
全尺寸图片
图 4 解算精度随观测量个数的变化情况Fig. 4 Variation of solution accuracy with the number of observations下载:
全尺寸图片
2) 观测量几何分布对解算精度的影响
观测量空间几何分布的不同将导致定位精度的差异性[22-25]。通过对不同空间几何分布的空间几何值计算,并绘制出随着空间几何值增长的解算精度曲线,如图5所示。
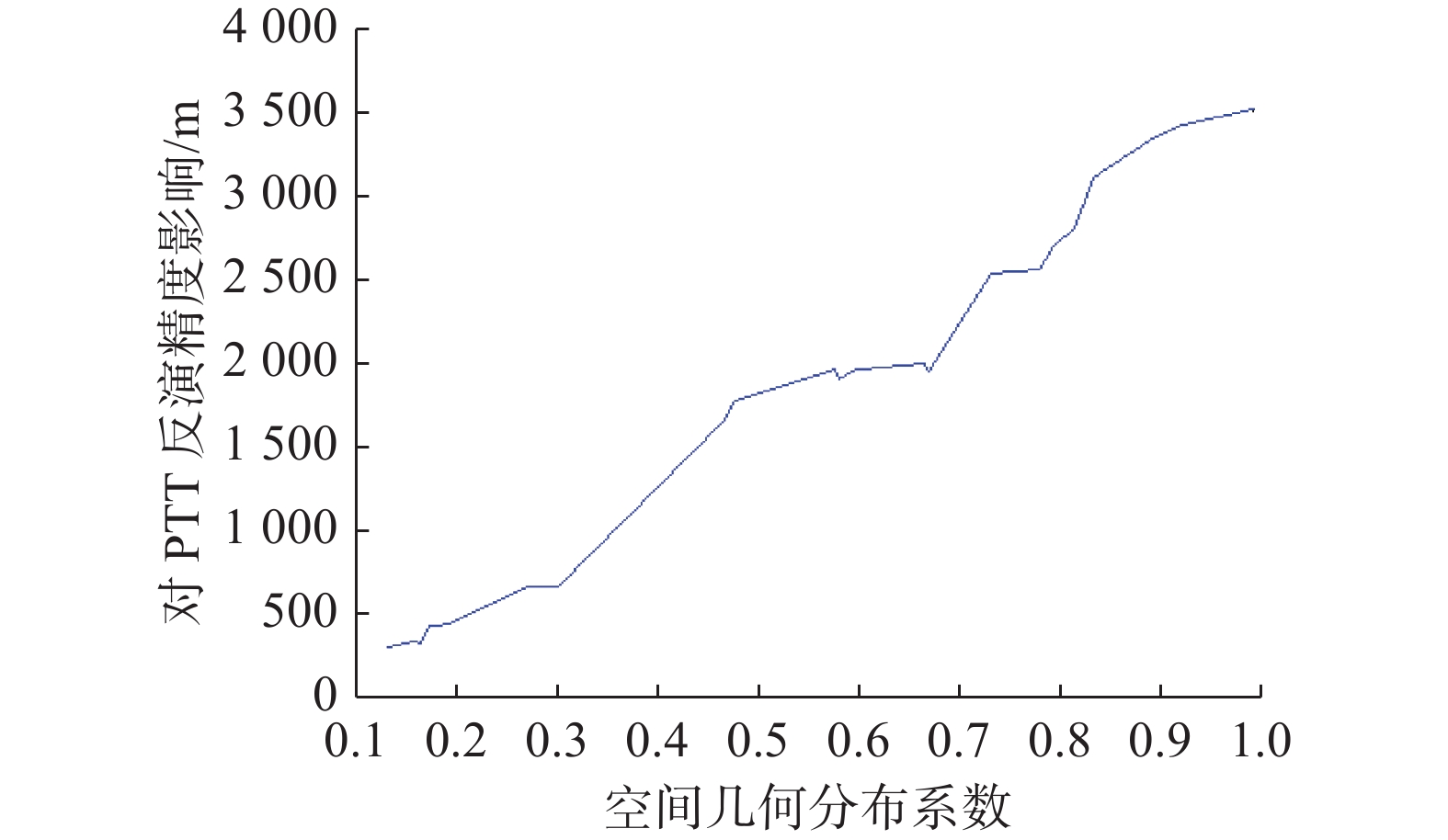 图 5 卫星空间几何分布系数与解算精度关系曲线Fig. 5 Relationship curve between satellite spatial geometric distribution coefficient and calculation accuracy下载:
全尺寸图片
图 5 卫星空间几何分布系数与解算精度关系曲线Fig. 5 Relationship curve between satellite spatial geometric distribution coefficient and calculation accuracy下载:
全尺寸图片
从图5中可知,随着DOP值得增大,解算精度恶化明显,DOP值越小,其解算精度相对越好。
4.2 卫星时标对位置精度的影响分析
选择1000个PTT的测量数据,分别做100、200、400 ms这3个不同的失准化处理后,进行仿真测试。仿真结果如图6所示。
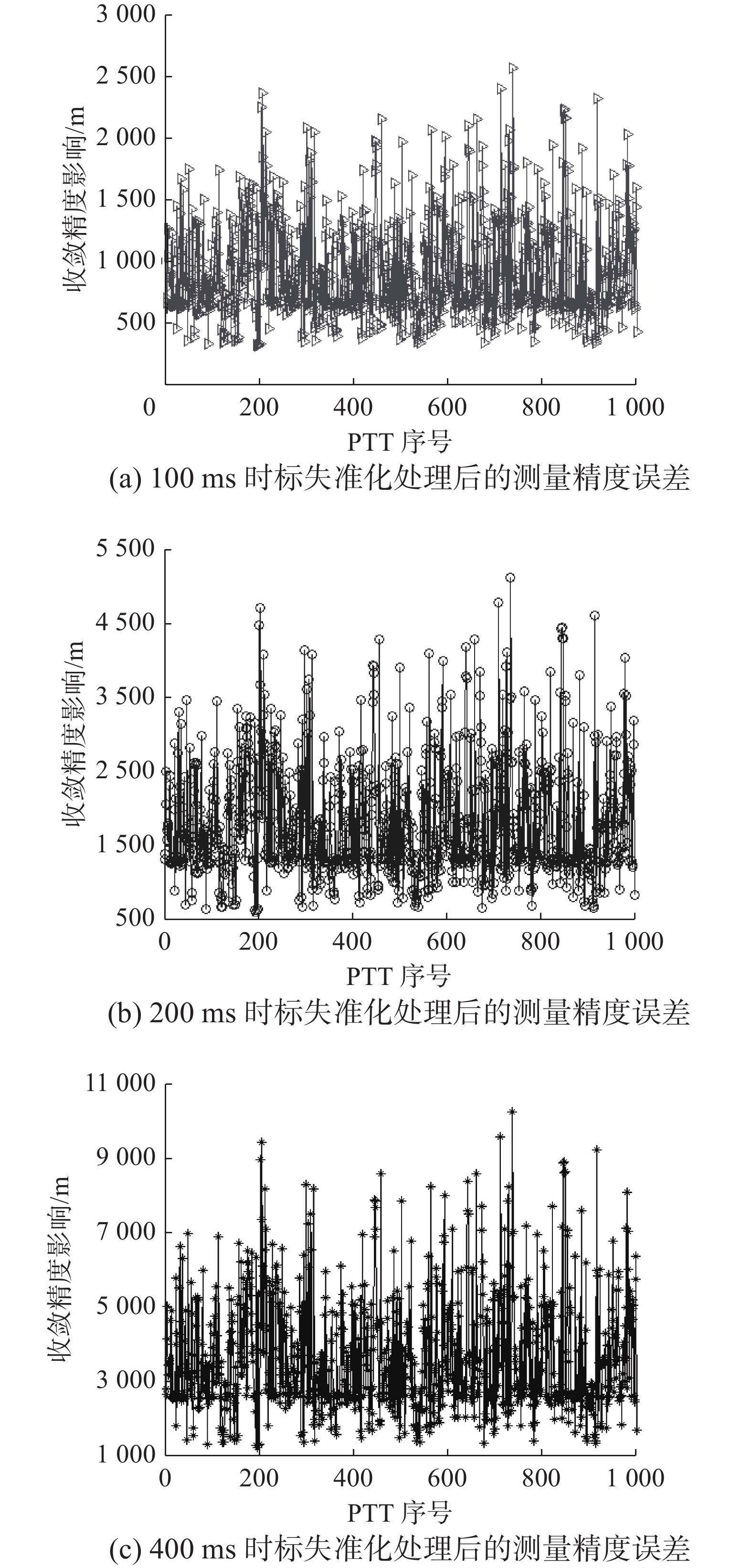 图 6 不同时标失准化处理后测量精度误差Fig. 6 Measurement accuracy error after different time scale misalignment treatment下载:
全尺寸图片
图 6 不同时标失准化处理后测量精度误差Fig. 6 Measurement accuracy error after different time scale misalignment treatment下载:
全尺寸图片
从图6中可以看出,在做100 ms时标失准化处理后,定位精度误差均值达到km级,最大误差为2.56 km,最小误差为308.13 m,在做200 ms时标失准化处理后,定位精度误差均值达到2 km级,最大误差为5.123 km,最小误差为616.29 m,做400 ms时标失准化处理后,定位精度误差均值达到4 km,最大误差为10.25 km,最小误差为1.23 km。
对时标移动对定位精度的影响性质进行分析,将上面100 ms、200 ms、400 ms失准化处理后的定位结果绘制于同一图中,每隔30个数据抽取一个,得到图7所示的定位精度统计图。
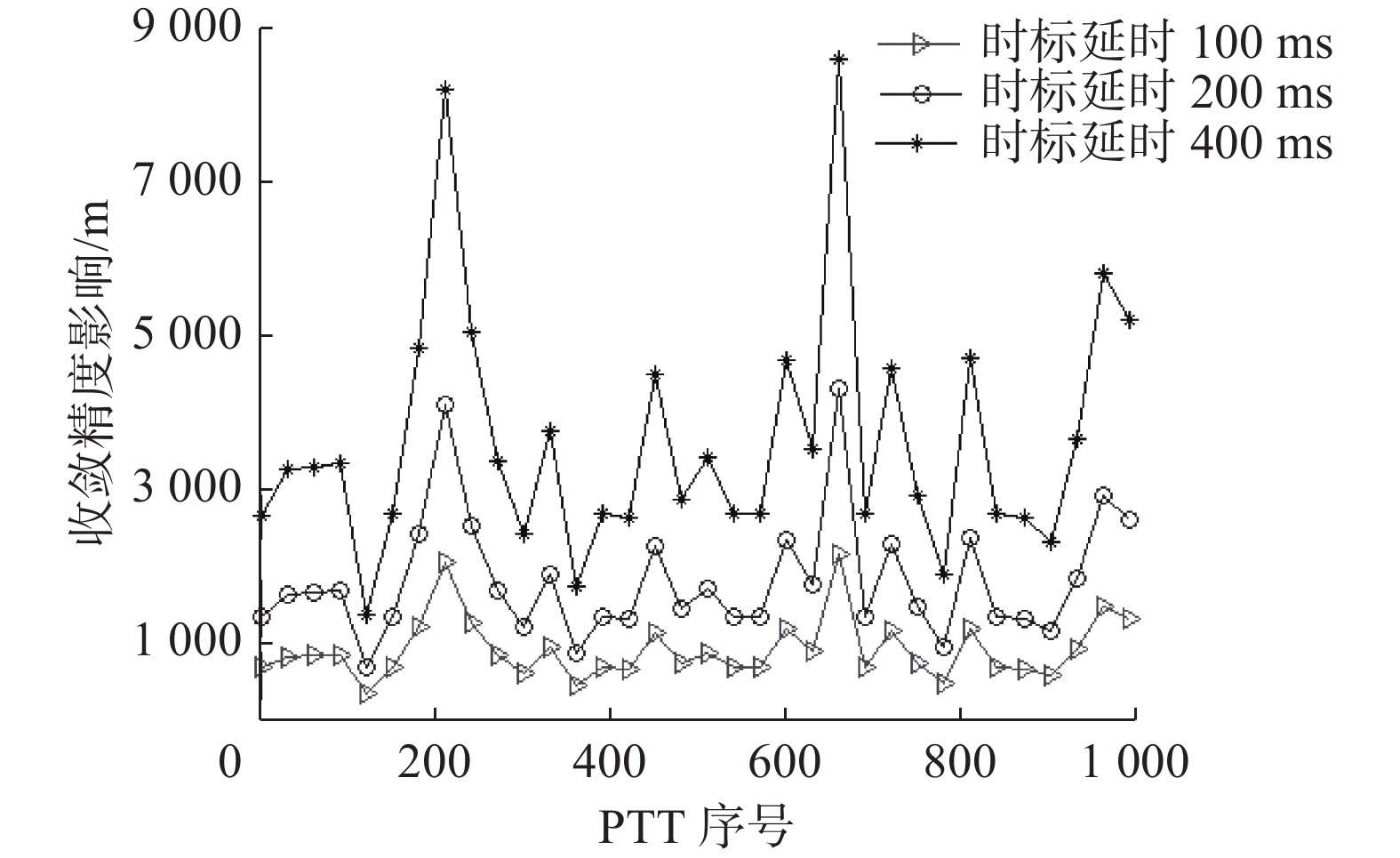 图 7 时标失准对定位精度的影响性质分析Fig. 7 Analysis of the influence of time scale misalignment on positioning accuracy下载:
全尺寸图片
图 7 时标失准对定位精度的影响性质分析Fig. 7 Analysis of the influence of time scale misalignment on positioning accuracy下载:
全尺寸图片
由图7可见,3条曲线接近于平行,即时标延时100、200、400 ms对PTT定位精度的影响基本呈现线性的变化趋势,且由于时标失准的影响,原本已有的误差被放大化,时标延时是一个误差的累积过程。
4.3 其他影响因素分析
考虑电离层影响因素[22],当电磁波穿过充满电子的电离层时,它的传播速度和方向会发生改变,这种现象在光学物理中称为折射。PTT发出的UHF频段信号在穿过电离层到达DCS载荷的过程中,信号会发生电离层折射,由于折射的原因,DCS载荷的信号会在视距上存在一定偏移。接收机实际接收到的地面PTT信号传输距离为
$ {r_1} $ ,PTT在解算过程中收到的PTT信号传输距离为$ {r_0} $ ,则信号的电离层延时为$ I = {r_1} - {r_0} $ 。电离层延时的基本表达式为$$ I = F{I_z} $$ (11) 式中:
$ F $ 为载波频率;$ {I_z} $ 表示为$$ {I_z} = \left\{ \begin{split} &{5 \times {{10}^{ - 9}} + A\cos \left(\dfrac{{t - 50\;400}}{T}2{\text{π }}\right),\quad \left| {t - 50\;400} \right| < \dfrac{T}{4}} \\ &{5 \times {{10}^{- 9}},\quad\left| {t - 50\;400} \right| \geqslant \frac{T}{4}{\text{ }}} \end{split} \right. $$ 计算DCS卫星电离层延时,即
$$ I = I \times c $$ 由图8可见,电离层延时对测量精度的误差在视距上估算小于2.78 m,而对于精度要求1 km以下的定位算法而言,可忽略不计。
综上,对星基数据收集系统多普勒定位反演模型及相关影响因素进行分析对比,如表5。综合分析结论如下:
1)在洋流追踪应用工况下(不依赖高度信息),采用缺省高度约束模型能够有效实现5 km分辨率的PTT位置反演;
2)在当前考虑的3种工程因素中,时标失准因素对PTT位置反演精度的影响最大,而观测量规模次之,电离层影响几乎可以忽略不计。
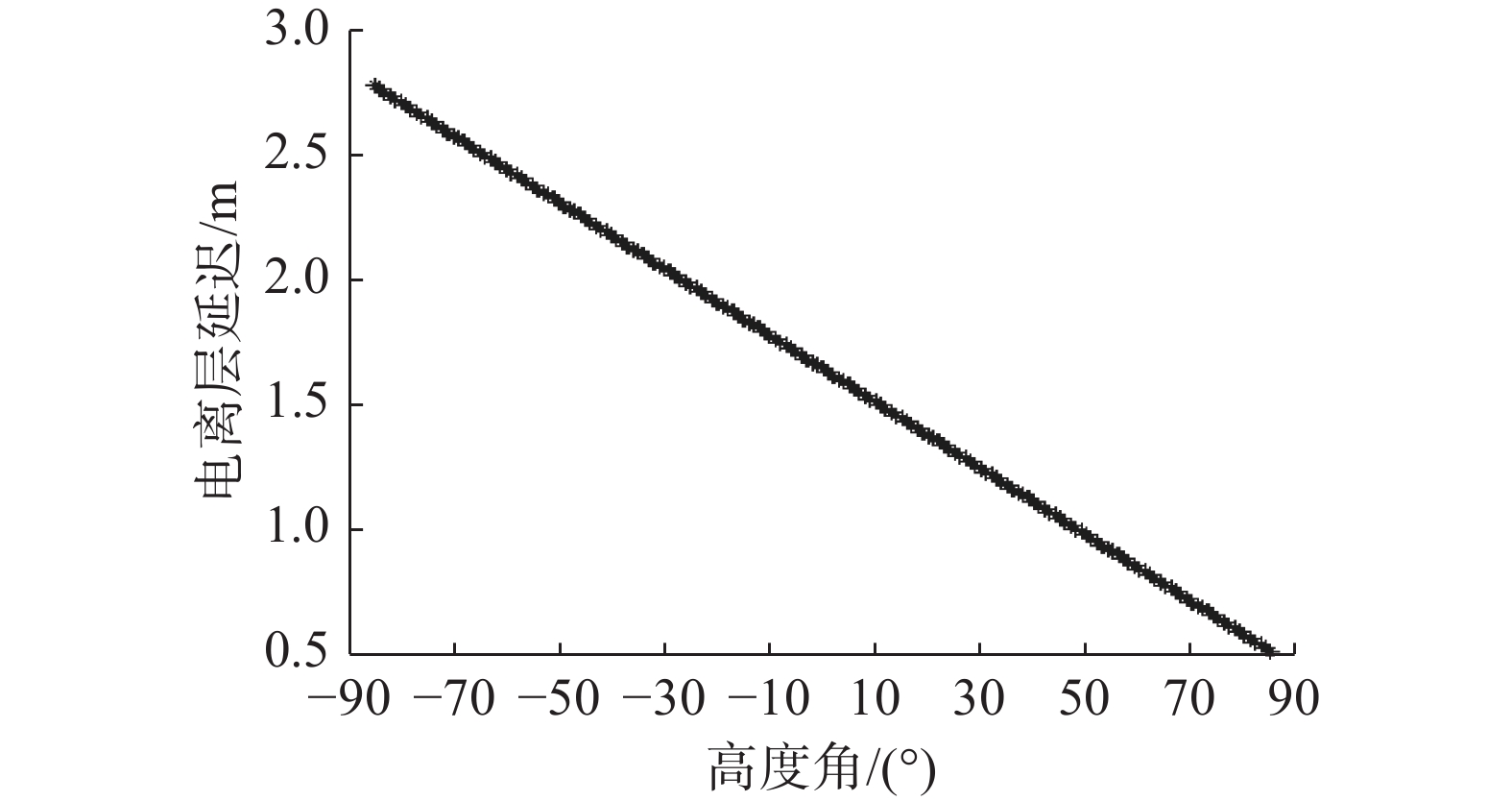 图 8 电离层延时随高度角(0±80°)变化情况Fig. 8 Variation of ionospheric delay with altitude angle 0±80°下载:
全尺寸图片
表 5 不同模型PTT位置反演精度及影响因素汇总表Table 5 Summary of PTT position inversion accuracy of different models and influencing factors
图 8 电离层延时随高度角(0±80°)变化情况Fig. 8 Variation of ionospheric delay with altitude angle 0±80°下载:
全尺寸图片
表 5 不同模型PTT位置反演精度及影响因素汇总表Table 5 Summary of PTT position inversion accuracy of different models and influencing factors模型 收敛情况
(达到5 km分辨率数量)/%观测量规模影响/km 时标失准影响/km 电离层影响/km 最小值 最大值 最小值 最大值 最小值 最大值 传统模型 0/0 0.25 3.5 1.23 10.25 0.002 8 0.000 5 数字高程约束模型 0/0 地球表面约束模型 486/24.3 缺省高度约束模型 2 000/100 5. 结束语
本文结合海洋卫星数据收集系统下行数据,对多普勒定位反演模型进行了改进研究,结合海洋卫星单星测量和洋流追踪不依赖高度信息的特点,分析对比了不同约束模型的收敛情况,从结果可见,缺省高度约束模型最适应该种场景应用。而针对工程应用,有以下2方面结论:
1)对于星上载荷设计,数据收集系统时标失准问题因其对位置反演精度影响较大(10 km级),因此在系统设计上最大限度提升时标精度是卫星数据收集系统设计的重点考虑要素。
2)对于应用系统设计,观测量规模是影响反演精度的另一个主要因素,采用数据积累或多星重访的方式提升对同一PTT在相同时间段内大量观测是系统设计应考虑的重要因素。
-
图 1 PTT位置反演原理示意图
Fig. 1 PTT position inversion principle diagram
下载:
全尺寸图片
图 2 地球表面约束位置反演结果统计图
Fig. 2 Statistical chart of inversion results by using constrained position on earth surface
下载:
全尺寸图片
图 3 缺省高度约束位置反演算法定位结果统计图
Fig. 3 Statistical chart of positioning results by using default height constraint position inversion algorithm
下载:
全尺寸图片
图 4 解算精度随观测量个数的变化情况
Fig. 4 Variation of solution accuracy with the number of observations
下载:
全尺寸图片
图 5 卫星空间几何分布系数与解算精度关系曲线
Fig. 5 Relationship curve between satellite spatial geometric distribution coefficient and calculation accuracy
下载:
全尺寸图片
图 6 不同时标失准化处理后测量精度误差
Fig. 6 Measurement accuracy error after different time scale misalignment treatment
下载:
全尺寸图片
图 7 时标失准对定位精度的影响性质分析
Fig. 7 Analysis of the influence of time scale misalignment on positioning accuracy
下载:
全尺寸图片
图 8 电离层延时随高度角(0±80°)变化情况
Fig. 8 Variation of ionospheric delay with altitude angle 0±80°
下载:
全尺寸图片
表 1 误差等级定义
Table 1 Error level definition table
误差等级 距离误差/km I级 d<1 II级 1<d<5 III级 5<d<10 IV级 10<d<100 V级 d>100 表 2 地球表面约束反演精度个数统计表
Table 2 Statistical table of the number of precision by using earth surface constrained inversion
精度/ km 个数 0~1 174 1~5 312 5~10 209 10~100 1305 表 3 缺省高度约束定位精度个数统计表
Table 3 Statistical table for the number of positioning accuracy by using default height constraint
精度/km 个数 0~1 1821 1~5 179 表 4 观测量规模对反演精度的影响对比
Table 4 Comparison of the influence of observation scale on inversion accuracy
观测量个数 精度平均值/m 8~20 784.3181 8~25 728.0463 8~30 666.8665 8~60 512.2173 8~90 339.7690 8~120 248.3083 表 5 不同模型PTT位置反演精度及影响因素汇总表
Table 5 Summary of PTT position inversion accuracy of different models and influencing factors
模型 收敛情况
(达到5 km分辨率数量)/%观测量规模影响/km 时标失准影响/km 电离层影响/km 最小值 最大值 最小值 最大值 最小值 最大值 传统模型 0/0 0.25 3.5 1.23 10.25 0.002 8 0.000 5 数字高程约束模型 0/0 地球表面约束模型 486/24.3 缺省高度约束模型 2 000/100 -
[1] 吴青, 王乐, 刘佳仑. 自主水面货船研究现状与展望[J]. 智能系统学报, 2019, 14(1): 57–70. WU Qing, WANG Le, LIU Jialun. Research status and prospects of autonomous surface cargo ships[J]. CAAI transactions on intelligent systems, 2019, 14(1): 57–70. [2] 盖美, 朱莹莹, 郑秀霞. 中国沿海省区海洋绿色发展测度及影响机理研究[J/OL]. 生态学报, 2021, 41(23): 1−16[2021–07–28] http://kns.cnki.net/kcms/detail/11.2031.q.20210723.1224.046.html. GAI Mei, ZHU Yingying, ZHENG Xiuxia. Marine green and its influence mechanism of coastal cities[J/OL]. Acta ecologica sinca, 2021, 41(23): 1−16[2021–07–28] http://kns.cnki.net/kcms/detail/11.2031.q.20210723.1224.046.html. [3] 王奎民. 主要海洋环境因素对水下航行器航行影响分析[J]. 智能系统学报, 2015, 10(2): 316–323. WANG Kuimin. Influence of main ocean environments on the navigation of underwater vehicles[J]. CAAI transactions on intelligent systems, 2015, 10(2): 316–323. [4] 胡涛, 丁永生, 曾献辉, 等. 基于multi-Agent技术的海洋数据智能采集与传输系统[J]. 智能系统学报, 2009, 4(6): 508–512. HU Tao, DING Yongsheng, ZENG Xianhui, et al. Intelligent data acquisition and transmission system for oceanic data using a multi-Agent technique[J]. CAAI transactions on intelligent systems, 2009, 4(6): 508–512. [5] DICHIERA A M, KHURSIGARA A J, ESBAUGH A J. The effects of warming on red blood cell carbonic anhydrase activity and respiratory performance in a marine fish[J]. Comparative biochemistry and physiology part A:molecular and integrative physiology, 2021, 260: 111033. [6] JONSEN I D, PATTERSON T A, COSTA D P, et al. A continuous-time state-space model for rapid quality control of argos locations from animal-borne tags[J]. Movement ecology, 2020, 8(1): 1–31. doi: 10.1186/s40462-020-00217-7 [7] AUGER-MÉTHÉ M, DEROCHER A E. Argos and GPS data for a polar bear track[J]. Methods, 2021(1): 3–19. [8] IRVINE L M, WINSOR M H, FOLLETT T M, et al. An at-sea assessment of Argos location accuracy for three species of large whales, and the effect of deep-diving behavior on location error[J]. Animal biotelemetry, 2020, 8(1): 1–17. doi: 10.1186/s40317-020-00207-x [9] SIMION I T, SHEN Juntai, KOPOSOV S E, et al. Mapping the tilt of the Milky Way bulge velocity ellipsoids with ARGOS and Gaia DR2[J]. Monthly notices of the royal astronomical society, 2021, 502(2): 1740–1752. doi: 10.1093/mnras/stab073 [10] 王晓慧, 张卫民, 王品强, 等. 基于Argo历史观测的南海海盆尺度中层流场研究[J]. 海洋学报, 2018, 40(6): 1–14. WANG Xiaohui, ZHANG Weimin, WANG Pinqiang, et al. Research on mid-depth current of basin scale in the South China Sea based on historical Argo observations[J]. Acta oceanologica sinica, 2018, 40(6): 1–14. [11] WANG Pinqiang, ZHU Mengbin, CHEN Yan, et al. Ocean satellite data assimilation using the implicit equal-weights variational particle smoother[J]. Ocean modelling, 2021, 164: 101833. doi: 10.1016/j.ocemod.2021.101833 [12] 齐小刚, 张海洋, 魏倩. 一种非视距环境下的目标定位算法[J]. 智能系统学报, 2021, 16(1): 75–80. QI Xiaogang, ZHANG Haiyang, WEI Qian. A target localization algorithm in NLOS environments[J]. CAAI transactions on intelligent systems, 2021, 16(1): 75–80. [13] 冯奇, 曲长文, 李廷军. 基于约束加权最小二乘的无源定位闭式解算方法[J]. 系统工程与电子技术, 2017, 39(2): 263–268. doi: 10.3969/j.issn.1001-506X.2017.02.05 FENG Qi, QU Changwen, LI Tingjun. Closed-form solution for passive localization based on constrained weighted least squares[J]. Systems engineering and electronics, 2017, 39(2): 263–268. doi: 10.3969/j.issn.1001-506X.2017.02.05 [14] 蒋伊琳, 刘梦楠, 郜丽鹏, 等. 运动多站无源时差/频差联合定位方法[J]. 系统工程与电子技术, 2019, 41(7): 1441–1449. doi: 10.3969/j.issn.1001-506X.2019.07.02 JIANG Yilin, LIU Mengnan, GAO Lipeng, et al. Joint passive location method of TDOA and FDOA for moving multi-station[J]. Systems engineering and electronics, 2019, 41(7): 1441–1449. doi: 10.3969/j.issn.1001-506X.2019.07.02 [15] 黄东华, 赵勇胜, 赵拥军, 等. 基于DOA-TDOA-FDOA的单站无源相干定位代数解[J]. 电子与信息学报, 2021, 43(3): 735–744. doi: 10.11999/JEIT200470 HUANG Donghua, ZHAO Yongsheng, ZHAO Yongjun, et al. An algebraic solution for single-observer passive coherent location using DOA-TDOA-FDOA measurements[J]. Journal of electronics and information technology, 2021, 43(3): 735–744. doi: 10.11999/JEIT200470 [16] FENG Xuzhe, DAI Jianzhong, JIA Aiai, et al. Single star Doppler passive positioning accuracy analysis and processing based on sea state sensor[J]. Measurement, 2020, 155: 107555. doi: 10.1016/j.measurement.2020.107555 [17] AHMED M M, HO K C, WANG Gang. Localization of a moving source by frequency measurements[J]. IEEE transactions on signal processing, 2020, 68: 4839–4854. doi: 10.1109/TSP.2020.3016133 [18] CUI Xunxue, YU Kegen, ZHANG Shaowei, et al. Closed-form geometry-aided direction estimation using minimum TDOA measurements[J]. Signal processing, 2021, 188: 108224. doi: 10.1016/j.sigpro.2021.108224 [19] 宋叶志, 胡小工, 黄勇, 等. Argos海洋浮标多普勒定位原理与方法[J]. 飞行器测控学报, 2011, 30(6): 82–86. SONG Yezhi, HU Xiaogong, HUANG Yong, et al. A method of satellite Doppler positioning of Argos system[J]. Journal of spacecraft TT and C technology, 2011, 30(6): 82–86. [20] 白建军, 赵学胜, 陈军. 基于椭球面三角格网的数字高程建模[J]. 武汉大学学报.信息科学版, 2005, 30(5): 383–387. BAI Jianjun, ZHAO Xuesheng, CHEN Jun. Digital elevation modeling based on hierarchical subdivision of the triangular meshes on ellipsoidal surface[J]. Geomatics and Information Science of Wuhan University, 2005, 30(5): 383–387. [21] 邓兵, 孙正波, 杨乐, 等. 带目标高度约束信息的TOA无源定位[J]. 西安电子科技大学学报, 2017, 44(3): 133–137. DENG Bing, SUN Zhengbo, YANG Le, et al. Geolocation of a known altitude object using TOA measurements[J]. Journal of Xidian University, 2017, 44(3): 133–137. [22] 袁运斌, 霍星亮, 张宝成. 近年来我国GNSS电离层延迟精确建模及修正研究进展[J]. 测绘学报, 2017, 46(10): 1364–1378. doi: 10.11947/j.AGCS.2017.20170349 YUAN Yunbin, HUO Xingliang, ZHANG Baocheng. Research progress of precise models and correction for GNSS ionospheric delay in China over recent years[J]. Acta geodaetica et cartographica sinica, 2017, 46(10): 1364–1378. doi: 10.11947/j.AGCS.2017.20170349 [23] 袁运斌. 基于GPS的电离层监测及延迟改正理论与方法的研究[D]. 武汉: 中国科学院测量与地球物理研究所, 2002. YUAN Yunbin. Study on theories and methods of correction ionospheric delay and monitoring ionosphere based on GPS[D]. Wuhan: Institute of Geodesy and Geophysics, Chinese Academy of Sciences, 2002. [24] 袁运斌, 李敏, 霍星亮, 等. 北斗三号全球导航卫星系统全球广播电离层延迟修正模型(BDGIM)应用性能评估[J]. 测绘学报, 2021, 50(4): 436–447. YUAN Yunbin, LI Min, HUO Xingliang, et al. Research on performance of BeiDou global broadcast ionospheric delay correction model (BDGIM) of BDS-3[J]. Acta geodaetica et cartographica sinica, 2021, 50(4): 436–447. [25] 薛伟峰, 倪育德. Kalman滤波估算电离层延迟的一种优化方法[J]. 空间科学学报, 2021, 41(2): 273–278. doi: 10.3724/SP.J.0254-6124.2021.0207 XUE Weifeng, NI Yude. Optimization of Kalman filtering in estimating ionospheric delay[J]. Chinese journal of space science, 2021, 41(2): 273–278. doi: 10.3724/SP.J.0254-6124.2021.0207





















































































