
Multi-UUV base defense cooperative countermeasure under the asymmetric game condition
-
摘要: 针对非对称博弈下的水下无人对抗问题,开展对基于基地防卫的多无人水下潜航器(unmanned underwater vehicles, UUVs)协同对抗策略研究。在双方能力和数量有差异的非对称博弈情况下,设计UUV基本行为,分别基于红、蓝方能力设计对抗策略选择方法;本文提出红方多UUV分层决策算法,并设计红方多UUV角色分配方法;在防卫任务中基于目标偏航角设计两种红方多UUV联合防卫方法;并相应给出设计蓝方UUV策略及决策方法。最后设计水下对抗仿真实验,从对抗过程的事件决策、UUV机动控制等方面验证了本文设计的对抗方法对水下非对称条件下的多UUV对抗问题具有有效性。Abstract: Aiming at the problem of unmanned underwater warfare under the asymmetric game condition, in this paper, we examine the cooperative countermeasure of multiple unmanned underwater vehicles (UUVs) based on base defense. In an asymmetric game with differences in ability and quantity between the red and blue sides, the basic behaviors of UUVs and the selection methods of the countermeasures of both sides are designed. This paper proposes a hierarchical decision-making algorithm for the red side and designs a role assignment method of its UUVs. In a defense task, two kinds of red-side multi-UUV joint defense methods are designed based on the target yaw angle; the strategy and the decision-making method of UUVs of the blue side are given correspondingly. Finally, the simulation experiment of underwater confrontation is designed, and the effectiveness of the proposed method with respect to multi-UUV confrontation under an underwater asymmetric game condition is verified from the aspects of event decision-making and UUV maneuver control in a confrontation.
-
无人水下航行器[1](unmanned underwater vehicles, UUV)是小体量、强自主性、高隐蔽性的水下机器人之一。现阶段正在研究的UUV[2]可集成具有打击能力的任务载荷,不仅能够执行探测任务,还可以执行攻击任务。在探测信息共享[3-5]的前提下,在一定范围内通过水声通信能够实现多UUV的水下协同对抗,可以克服单UUV的能力局限,提高完成对抗任务效能[6]。近期无人机在美军中的不断使用也表明:无人平台在军事领域内的应用以及利用无人平台配合完成作战任务将成为未来对抗形态的发展趋势[7]。美国捕食者无人机[8]是一种最为典型的察打一体无人机,可长时间对重要地面目标和低速低空目标进行侦察、识别和监视。LDUUV项目[9]是美国于2011年开始研制测试的一款可搭载具有打击能力的任务载荷的大直径重型无人潜航器。
关于多UUV对抗的研究现阶段较少,开放的文献不多,关于对抗的研究主要集中于多UUV围捕问题。在追逃问题研究中文献[10]在“图清理”方法的基础上,应用精英遗传算法于围捕问题中。文献[11]提出了一种分散的围捕策略,可以在有限时间内捕获入侵智能体。文献[12]基于apolonius圆提出了动态围捕入侵智能体的方法。文献[13]利用生物激励神经网络解决多机器人围捕问题,通过计算并选择相邻细胞神经网络的最大活动值,得到参与围捕的机器人的围捕路径,实现有效围捕。文献[14]设计了对足球机器人团队角色和任务进行分工的模糊推理系统,主要研究足球机器人角色和行为切换机制。文献[15]提出一种基于狮群算法多AUV围捕方法,实现在围捕中最佳围捕者的选择和围捕任务中的角色分配。
无人系统协同对抗要求“参与者”协调行动,以获得最大利益为核心目标,根据环境信息、敌方信息以及我方对抗态势不断选择策略[16]。现阶段对于无人系统协同对抗的研究对象多为机器人、无人机[17]和地面无人车,主要研究集中于对抗中的任务分配、作战方式、干扰手段。自然进化计算[18]、社会进化计算[19]、生物智能计算[20]、群集智能计算[21]等智能算法也被大量运用于武器分配、协同搜索、追逃围捕等问题的研究中来。文献[22]应用空间链路调度算法研究多机器人任务协调分配问题。文献[23]提出近似规划方法研究一对一空战,解决无人机空战对抗飞行控制问题。文献[24]讨论无人机对地空战问题,不仅给出协同策略,还考虑了武器、无人机数量以及地面防御系统设置等问题。文献[25]研究多无人机对抗,设计多无人机对抗实验案例,对不同角色的无人机设计了行为集,无人机根据对抗过程中的态势,从行为集里选择最优行为完成对抗过程。文献[26]研究了有人机和无人机协同作战,主要聚焦于对抗期间的飞行路径规划。
由于水下对抗环境复杂、通信受限、探测能力受限,关于水下对抗的研究现阶段还较少。文献[27]主要研究水下对抗过程中的传感器探测组网问题,比较了不同度量条件下的探测性能。文献[6]验证粒子群优化对水下多AUV协同对抗的动态博弈模型求解的有效性。文献[28]研究多UUV对抗过程,并给出对抗过程中态势评估及策略选择方案。随着无人系统的不断发展,水下对抗问题正引起国内外诸多学者的广泛关注。
从上述研究中可以看出,在诸多已有的研究中,对抗问题主要存在以下问题:1)单个UUV策略选择研究多,多UUV协同决策研究少,单方面策略优化选择研究多,双方策略对抗博弈研究少;2)研究对抗双方无能力差异的情况多,研究“多对一”、“弱对强”的少。本文从无人对抗的角度考虑水下多UUV对抗存在的通信、自主决策等问题,设计多UUV对抗过程。针对对抗中的策略选择与角色分配问题,以多UUV基地防卫作为对抗任务背景,提出一种基于角色分配的多UUV协同对抗策略选择方法,完成多对一攻防对抗任务仿真。
1. 基地防卫任务想定与研究约束条件
基地防卫任务想定:如图1所示,红色小旗为红方被保护区域,蓝方UUV(图中以黄色UUV示意)在本次攻防任务中为攻击方,其任务为破坏红方基地,当蓝方UUV成功对红方被保护基地造成破坏,认定红方本次攻防任务失败。红方多UUV通过攻击、防守、围捕等手段保护基地不被摧毁,则认定红方本次攻防任务成功。
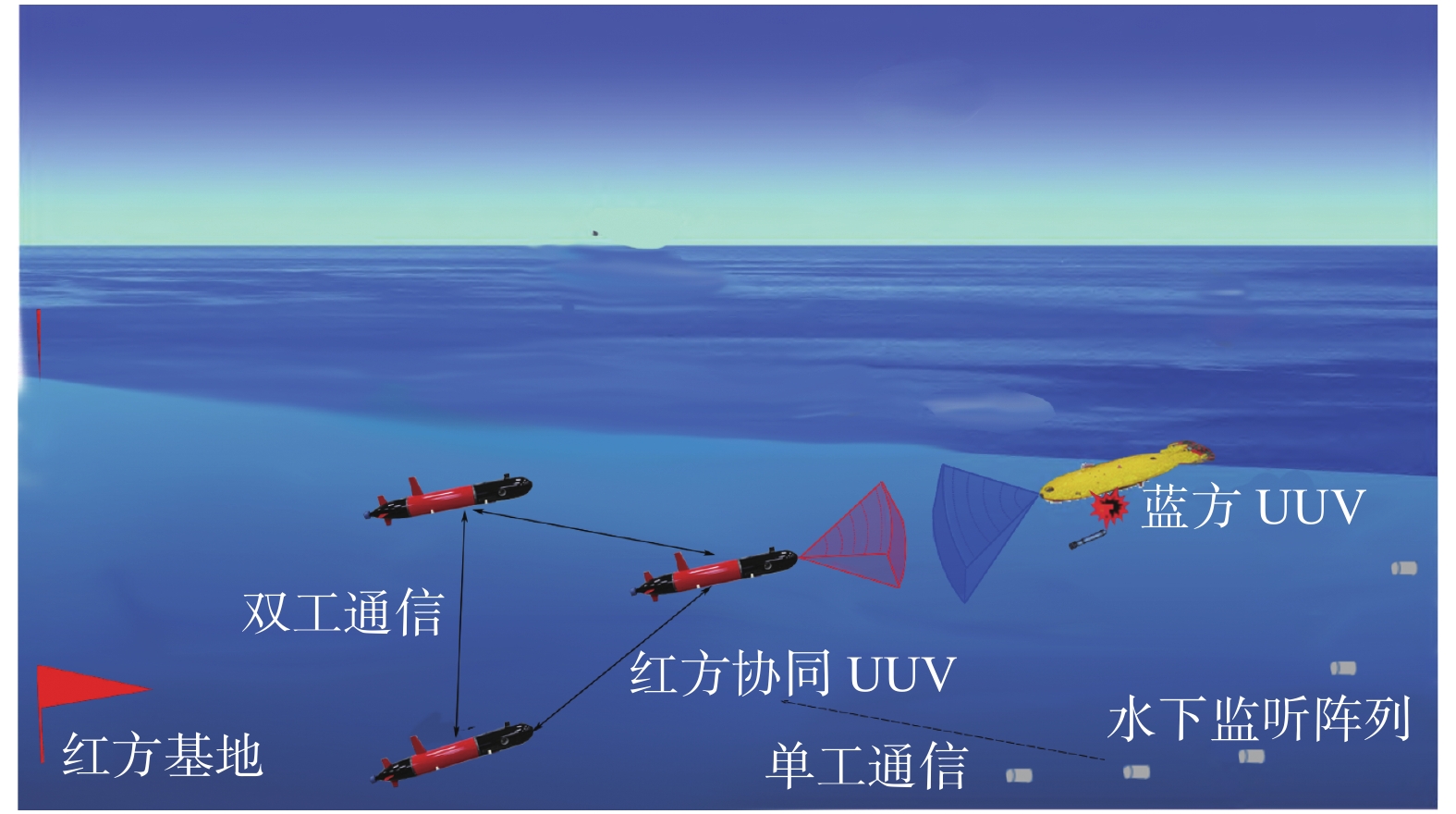 图 1 对抗情形Fig. 1 Confrontation situation
图 1 对抗情形Fig. 1 Confrontation situation 下载:
全尺寸图片
下载:
全尺寸图片
本文主要研究在对抗中双方的策略选择问题,因此不考虑红方水声通信时延,多UUV间的通信定义为双工实时通信,红方UUV能够通过预置的水下监听装置探测到蓝方UUV的位姿信息,蓝方则通过被动声呐探测一定范围内的红方UUV位姿信息。在对抗过程中,双方的攻击方式均为发射任务模块,双方的策略对对方不可知的,所有参与对抗的UUV仅能通过声呐探测到武器。为方便理论研究和设计仿真实验,对参与对抗的UUV的尺寸和机动能力以及武器参数等比例地缩小,表1所示为UUV的参数配置。
表 1 红蓝UUV配置参数Table 1 Configuration parameters of red and blue UUVsUUV 数量/台 速度 探测声呐 任务模块 正常航行速
度/ (m·s−1)最大航行速
度/(m·s−1)探测范
围/m开角/(°) 数量/枚 速度/
(m·s−1)作用距
离/m毁伤半
径/m红方UUV 3 ${V_{\rm nor} }$ $ {V_{\max }} $ $ D $ $ A $ 2 $ {V_m} $ $ L $ $ R $ 蓝方UUV 1 ${\text{2} }{V_{\rm nor} }$ $ {\text{1}}{\text{.5}}{V_{\max }} $ $ {\text{1}}{\text{.5}}D $ $ {\text{1}}{\text{.2}}A $ 3 $ {\text{1}}{\text{.5}}{V_m} $ $ {\text{1}}{\text{.2}}L $ $ {\text{1}}{\text{.5}}R $ 2. 设计UUV运动控制器
由于本文所研究的多UUV对抗过程中的机动行为不包括升潜运动,所以本文利用增量式PID根据UUV的控制需求,设计UUV三自由度运动控制器。将控制UUV水平面运动的增量式PID运动控制器分为两部分:速度控制器和艏向控制器。由于本文所研究的UUV是欠驱动的,无法控制UUV的横向速度,因此,UUV的速度控制主要是通过控制UUV的纵向推力来控制UUV的纵向速度,使得UUV的实际纵向速度达到期望速度。艏向控制器是通过控制UUV的转艏力矩来控制UUV的艏向,使其实际艏向达到期望艏向。基于增量式PID设计的UUV水平面运动控制器如图2所示。
 图 2 基于增量式PID的UUV运动控制框图Fig. 2 UUV motion controller based on incremental PID下载:
全尺寸图片
图 2 基于增量式PID的UUV运动控制框图Fig. 2 UUV motion controller based on incremental PID下载:
全尺寸图片
3. UUV基本行为定义
根据参与对抗的UUV所执行的任务和分配到的角色将UUV的基本行为划分成以下5种:
1)逃逸
这一基本行为是指当UUV受到任务模块威胁时,通过艏向控制,选择最快远离威胁的方向进行逃逸。如图3所示,设
${\psi _{\rm tor}}$ 为任务模块的艏向角,$ {\psi _R} $ 为UUV艏向角,任务模块的航向向量为$\boldsymbol T$ ,UUV的航向向量为$\boldsymbol H$ 。此时,若任务模块位于UUV左舷,则UUV逃逸方向即此时的期望艏向为$$ {\psi _d} = {\psi _{\rm tor}} - \frac{{\text{π}} }{2} \times {\rm flag} $$ (1) 式中:
$$ {\rm flag} = \left\{ \begin{gathered} - 1,\quad {\boldsymbol{T}} \times {\boldsymbol{H}} < 0 \\ 1,\quad \;\;{\boldsymbol{T}} \times {\boldsymbol{H}} > 0 \\ \end{gathered} \right. $$ 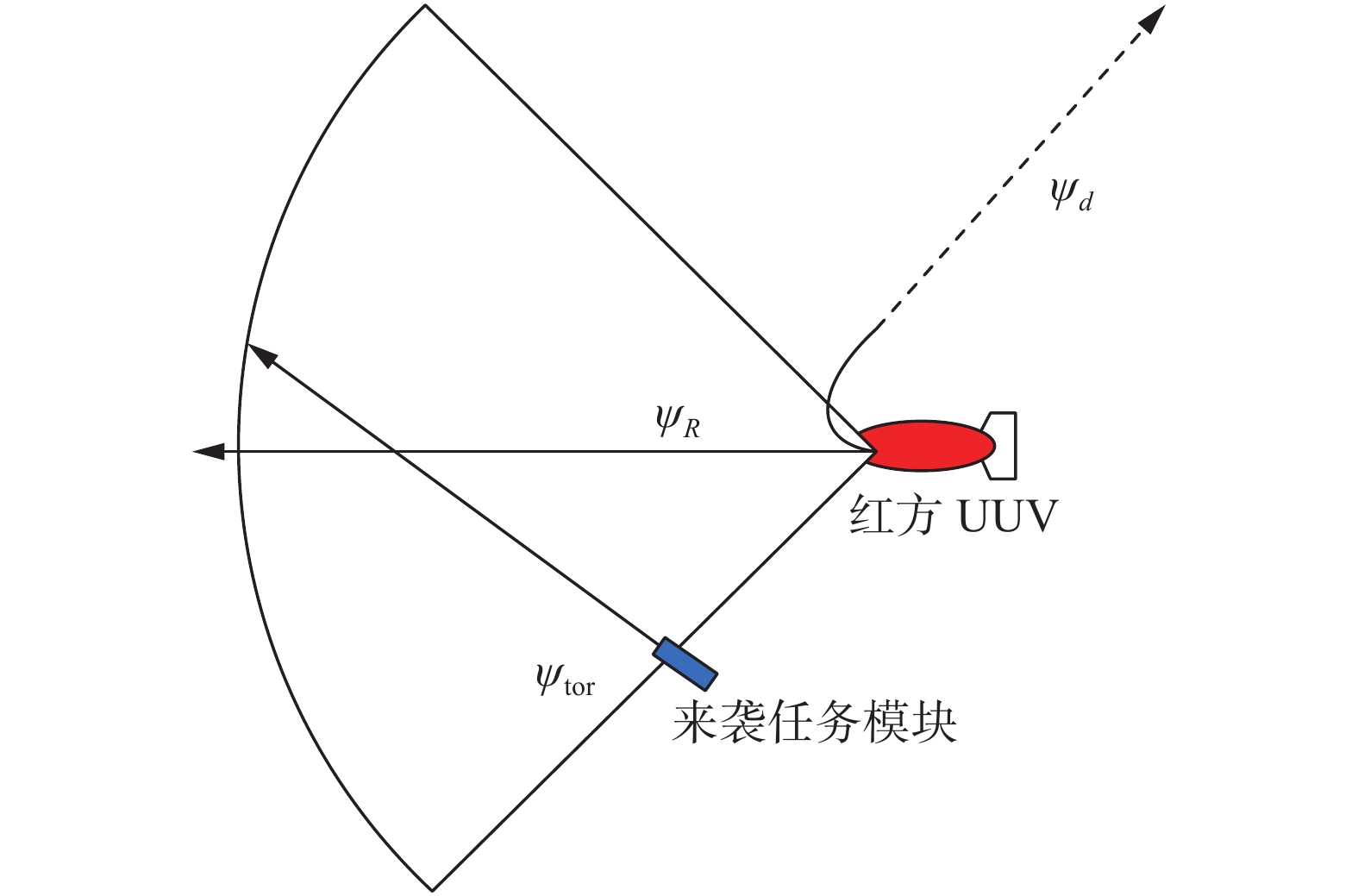 图 3 针对任务模块的逃逸方向Fig. 3 Escape direction for mission modules下载:
全尺寸图片
图 3 针对任务模块的逃逸方向Fig. 3 Escape direction for mission modules下载:
全尺寸图片
UUV在针对来袭UUV的逃逸方向选择上借鉴人工势场[29]的思想如图4所示。
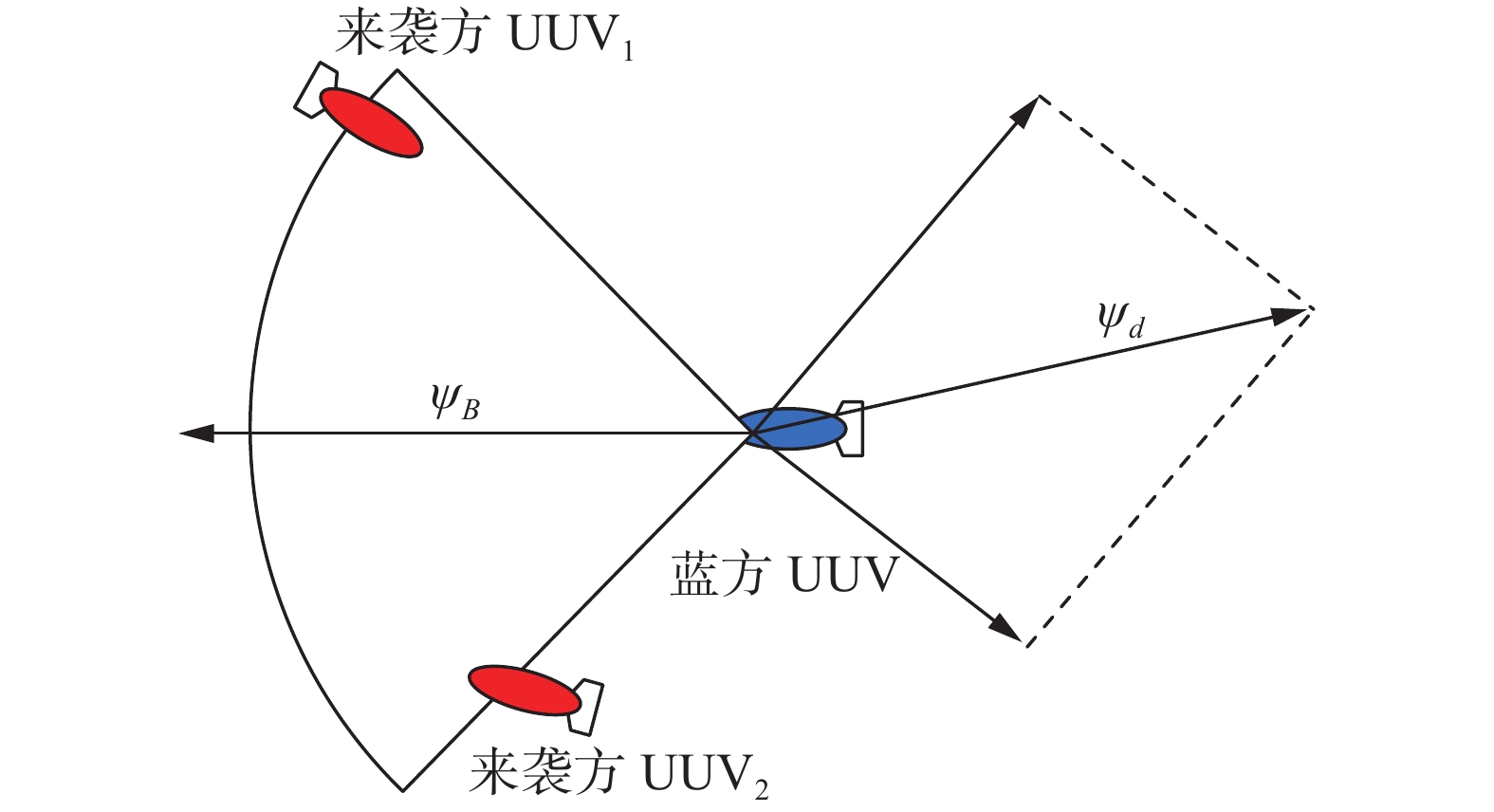 图 4 针对来袭UUV的逃逸方向Fig. 4 Escape direction for incoming UUV下载:
全尺寸图片
图 4 针对来袭UUV的逃逸方向Fig. 4 Escape direction for incoming UUV下载:
全尺寸图片
来袭UUV相当于给己方UUV生成一个斥力,力的大小与来袭UUV与己方UUV的距离成反比,若出现多个来袭目标对UUV,则叠加这些目标产生的斥力,得到的合力方向即为UUV的逃逸方向。斥力计算公式为
$$ {F_i} = \left\{ {\begin{array}{*{20}{l}} {\eta \left(\dfrac{{{x_0} - {x_i}}}{{d_i^n}}\hat {\boldsymbol{x}} + \dfrac{{{y_0} - {y_i}}}{{d_i^n}}\hat {\boldsymbol{y}}\right),\quad{d_i} \leqslant {d_{\rm tr}}} \\ {0,\quad{d_i} > {d_{\rm tr}}} \end{array}} \right. $$ (2) 式中:
$ \eta $ 为斥力比例系数;$ {d_i} $ 为来袭UUVi与己方UUV的距离;${d_{\rm tr}}$ 为己方UUV的威胁警示范围;$ n $ 为正整数;$ ({x_0},{y_0}) $ 为己方UUV的坐标;$ ({x_i},{y_i}) $ 为来袭UUV的坐标;$\hat {\boldsymbol{x}}$ 与$\hat {\boldsymbol{y}}$ 分别为$ x $ 与$ y $ 轴的单位向量,斥力合力的计算公式为$$ F = \sum\limits_{i = 1}^j {{F_i}} $$ (3) 式中:
$ j $ 为来袭UUV的个数。最后,可得到UUV的逃逸方向为$$ {\psi _d} = \frac{{\boldsymbol F}}{{\left| {\boldsymbol F} \right|}} $$ (4) 如果UUV在被任务模块威胁的同时探测到有来袭UUV,则不得不同时考虑两种威胁来选择逃逸方向,则同时计算式(3)、(4)确定逃逸方向。
2)UUV向定点运动
这一基本行为是UUV最基本的运动行为,如图5所示,定点的坐标
$(M_x,M_y)$ ,UUV坐标$ (x,y) $ ,则期望艏向角计算公式为$$\psi = \arctan \left(\frac{{M_y - y}}{{M_x - x}}\right) $$ (5) 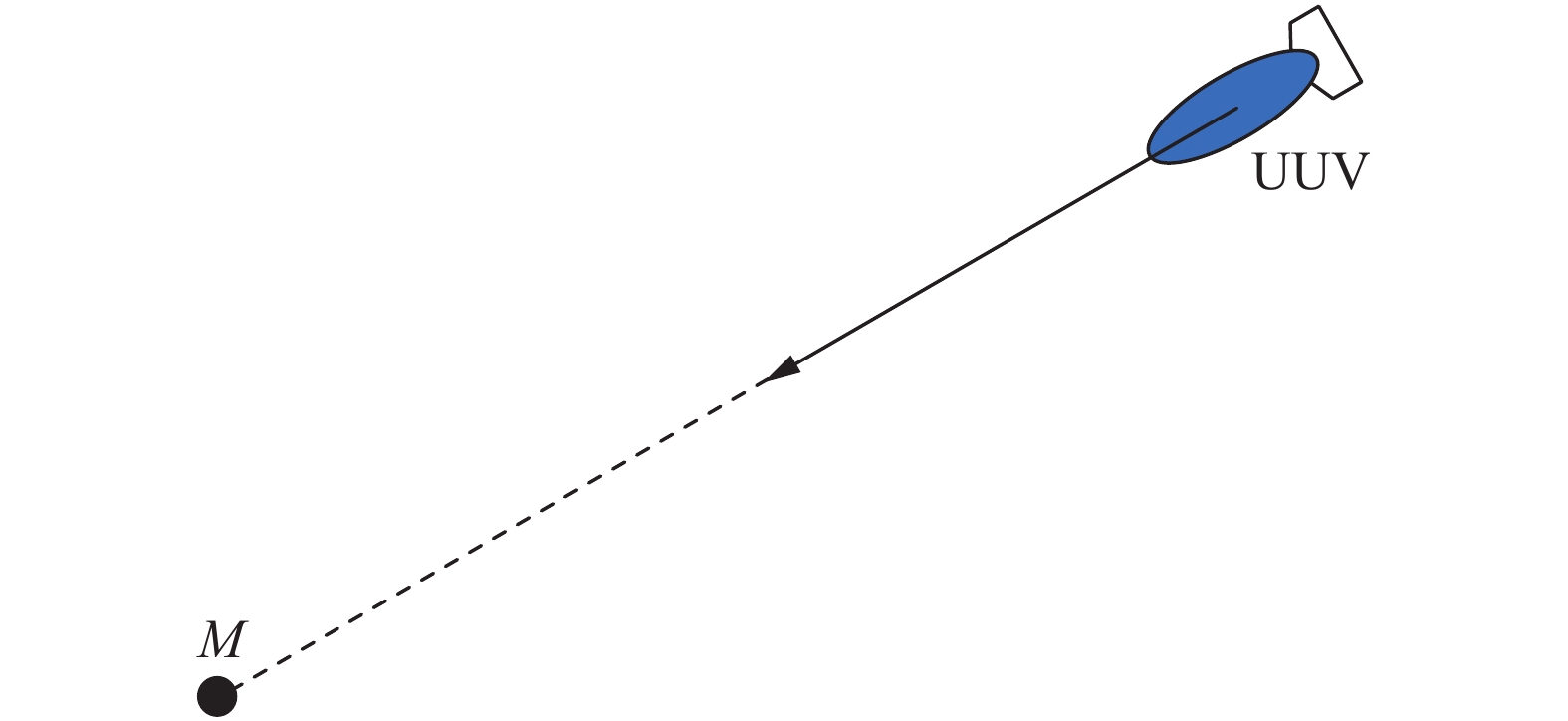 图 5 UUV朝某点运动Fig. 5 UUV moving towards a point下载:
全尺寸图片
图 5 UUV朝某点运动Fig. 5 UUV moving towards a point下载:
全尺寸图片
3)基本攻击行为
这一基本行为指处于可攻状态的UUV计算得到任务模块命中点,并发射任务模块的过程。
4)避碰
这一基本行为区别于敌我双方避障,主要针对合作关系的红方UUV需要时刻避免发生位置冲突。
5)追踪
这一基本行为是指使追踪UUV的艏向始终跟随目标UUV的位置,也就是使目标UUV始终位于追踪UUV的0°舷角位置[30],如图6所示。设追踪UUV坐标为
$ (x,y) $ ,目标UUV当前坐标为$ ({x_e},{y_e}) $ 。 图 6 UUV追踪行为Fig. 6 UUV Tracking Behavior下载:
全尺寸图片
图 6 UUV追踪行为Fig. 6 UUV Tracking Behavior下载:
全尺寸图片
4. 基于任务–角色–行为分层的红方多UUV协同对抗方法设计
红方策略是一种UUV群体的策略,本文提出一种基于总任务分解的任务–角色–行为分层的多UUV协同对抗方法。算法设计的群体策略生成机制如图7所示,根据威胁评估结果将UUV任务分为,即驱逐、紧急返回、攻击–防卫3种;根据不同的任务将UUV分为4种不同的角色分别为,即追踪UUV、返航UUV、核心攻击UUV和辅助攻击UUV。策略适用情况与策略制定理由如表2。
 图 7 红方多UUV任务及角色行为示意图Fig. 7 Red UUVs task and role behavior diagram下载:
全尺寸图片
图 7 红方多UUV任务及角色行为示意图Fig. 7 Red UUVs task and role behavior diagram下载:
全尺寸图片
4.1 考虑目标航向偏角的多UUV协同防卫方法设计
确定UUV角色后根据角色和蓝方UUV态势从而确定红方多UUV的协同防卫策略是红方多UUV基地防卫任务的重点。蓝方UUV航向偏角从一定程度上能够反映威胁意图,航向偏角越小,威胁意图越强,本文提出基于目标偏航角的协同防卫方法。如图8所示,目标航向偏角为UUV的航向同它与红方基地的连线的夹角
$\beta (t)$ 为目标航向偏角。表 2 红方多UUV任务选择及相应参数表Table 2 Red side multi UUV task selection and corresponding parameter table任务(策略) 角色种类 适用情况 具体描述 1 驱逐 追踪UUV
返航UUV中、低威胁评估等级且无可攻
红方UUV
蓝方状态不稳定选择返航UUV时,优先考虑距离,距离基地最近的红方UUV执行返航任务;其余所有UUV均为追踪UUV,任务优先级相同,当追踪UUV中出现任务点冲突时,则距离蓝方UUV距离越近的UUV,其优先级越高 2 紧急返回 返航UUV 高威胁等级且红方无可攻UUV 所有红方UUV均为返航UUV,执行返回基地保护基地任务。任务优先级相同,出现冲突时,则距离基地距离越近的UUV,其优先级越高 3 攻击防卫 核心攻击UUV 高威胁等级且红方有可攻UUV 基于“距离最短”分配策略点,在可攻UUV中选择离自身阵位点最近的作为核心攻击UUV 攻击防卫 辅助攻击UUV 中、低威胁等级且红方有可攻UUV时 基于“时间均衡”分配辅助攻击UUV的策略点,求解一组策略点使得所有辅助攻击UUV到达策略点的时间差异最小  图 8 目标航向偏角与目标距离Fig. 8 Target heading angle and target distance下载:
全尺寸图片
图 8 目标航向偏角与目标距离Fig. 8 Target heading angle and target distance下载:
全尺寸图片
由于蓝方机动性能强于红方,因此,若是将本文的多对一对抗过程简化为一对一,当蓝方UUV受到单一威胁,蓝方机动逃逸成功率高,使得红方UUV整体作战效能差[31]。如图9所示,UUVR2的任务模块本身并不是有效的,若是UUVB保持之前航线运动,UUVR1发射的任务模块将有效,若是
$\rm{ UUVB}$ 对${ \rm{ UUV}}{R_1}$ 发射的任务模块进行避碰,UUVR2的任务模块将变成有效的。所以采取基于目标航向角的联合打击方式对蓝方UUV进行打击。 图 9 UUV攻击方式Fig. 9 UUV attack mode下载:
全尺寸图片
图 9 UUV攻击方式Fig. 9 UUV attack mode下载:
全尺寸图片
4.1.1 蓝方UUV大航向偏角多UUV联合防卫方法
蓝方UUV的航向偏角如图中
$ \beta {\text{(}}t{\text{)}} > {90^ \circ } $ 时,设计如图10所示的联合防卫方式。根据上文设计的角色分配原则,${\rm{UUV}}{R_2}$ 为核心攻击UUV,承担攻击任务,将UUV完成任务需要到达的目标点命名为策略点,核心攻击UUV发射任务模块的阵位点就是其策略点,任务模块命中点为$ {P_2} $ 。${\rm{UUV}}{R_1}$ 和${\rm{UUV}}{R_3}$ 为辅助攻击UUV,其策略点为$ {P_1} $ 、$ {P_3} $ 也是发射任务模块的阵位点。此时,任务优先级设置为辅助攻击UUV>核心攻击UUV,若辅助攻击UUV在向策略点运动过程中出现冲突,那么与蓝方UUV距离近的UUV拥有更高的优先级。 图 10 蓝方UUV大航向偏角红方多UUV联合防卫方法Fig. 10 Blue UUV large heading angle red UUVs joint defense method下载:
全尺寸图片
图 10 蓝方UUV大航向偏角红方多UUV联合防卫方法Fig. 10 Blue UUV large heading angle red UUVs joint defense method下载:
全尺寸图片
在确定核心攻击UUV后,可以得到在核心攻击UUV发射任务模块的任务模块命中点
${P_2}({P_{2x}},{P_{2y}})$ ,则${P_1}({P_{1x}},{P_{1y}})$ 、${P_3}({P_{3x}},{P_{3y}})$ 策略点的计算方式为$$ \left\{ {\begin{array}{*{20}{l}} {{P_{1x }}= {P_{2x}} + L\cos ({\psi _B} + {\text{π}} - \beta )} \\ {{P_{1y}}= {P_{2y}} + L\sin ({\psi _B} + {\text{π}} - \beta )} \end{array}} \right. $$ (6) $$ \left\{ {\begin{array}{*{20}{l}} {{P_{3x}} = {P_{2x}} + L\cos ({\psi _B} - {\text{π}} + \beta )} \\ {{P_{3y}} = {P_{2y}} + L\sin ({\psi _B} - {\text{π}} + \beta )} \end{array}} \right. $$ (7) 式中:
$\beta {\text{ = }}\arctan ({V_m}/{V_B})$ ,其中$ {V_m} $ 为红方UUV任务模块速度;$ {V_B} $ 为蓝方UUV速度;${\psi_B}$ 为蓝方UUV艏向角。$ L $ 为红方UUV的任务模块射距。4.1.2 蓝方UUV中小航向偏角时多UUV联合防卫方法
蓝方UUV的航向偏角为
$ 0 \leqslant \beta {\text{(}}t{\text{) < }}{90^ \circ } $ 时,采用如图11所示的联合防卫。此时承担攻击任务的核心攻击UUV为$ {\rm{UUV}}{R_3} $ ,$ {P_3} $ 是命中点。${\rm{UUV}}{R_1}$ 、${\rm{UUV}}{R_2}$ 作为辅助攻击UUV,其策略点仍然是阵位点为图中的$ {P_1} $ 、$ {P_2} $ 或$P_1'$ 、$P_2'$ 。此时,任务优先级定义为核心攻击UUV>辅助攻击UUV,若辅助攻击UUV在向策略点运动过程中出现冲突,那么同样的与蓝方UUV距离近的红方UUV拥有更高的优先级。 图 11 蓝方UUV中小航向偏角红方多UUV联合防卫方法Fig. 11 Blue side UUV small heading angle red side UUVs joint defense method下载:
全尺寸图片
图 11 蓝方UUV中小航向偏角红方多UUV联合防卫方法Fig. 11 Blue side UUV small heading angle red side UUVs joint defense method下载:
全尺寸图片
确定核心攻击UUV后,可以得到在核心攻击UUV发射任务模块的时刻蓝方UUV的位置
${U_2}({U_{2x}},{U_{2y}})$ 以及该UUV的阵位点位置${U_1}({U_{1x}},{U_{1y}})$ 与任务模块命中点${P_3}({P_{3x}},{P_{3y}})$ ,又已知红方区域的坐标为$(M_x,M_y)$ ,定义${P_1}({P_{1x}},{P_{1y}})$ 为阵位点关于蓝方UUV航向的对称点,则${P_1}({P_{1x}},{P_{1y}})$ 、${P_2}({P_{2x}},{P_{2y}})$ 、$P_2'(P_{2x}',P_{2y}')$ 策略点的计算公式为$$\left\{ {\begin{aligned} &{P_{1x}} = \dfrac{{2\tan ({\psi _B})({U_{1y}} - {P_{3y}} + \tan ({\psi _B}){P_{3x}} + {U_{1x}})}}{{{{\tan }^2}({\psi _B}) + 1}}- {U_{1x}} \\ &{P_{1y}} = 2\bigg(\dfrac{{{{\tan }^2}({\psi _B})({U_{1y}} - {P_{3y}} + \tan ({\psi _B}){P_{3x}} + {U_{1x}})}}{{{{\tan }^2}({\psi _B}) + 1}} +\\ &\qquad\qquad\qquad{P_{3y}} - \tan ({\psi _B}){P_{3x}}\bigg) - {U_{1y}} \end{aligned}} \right.$$ (8) $$ \left\{ {\begin{array}{*{20}{l}} {{P_{2x}} = {P_{3x}} + r\cos ({\psi _B} + {\text{π}} - \beta )} \\ {{P_{2y }}= {P_{3y}} + r\sin ({\psi _B} + {\text{π}} - \beta )} \end{array}} \right. $$ (9) $$ \left\{ {\begin{array}{*{20}{l}} {P_{2x}'} = {P_{3x}} + r\cos ({\psi _B} + {\text{π}} - \beta ) \\ {P_{2y}'} = {P_{3y}} + r\sin ({\psi _B} + {\text{π}} - \beta ) \end{array}} \right. $$ (10) 式中:
$ \beta = \arctan ({V_m}/{V_B}) $ ,其中$ {V_m} $ 为红方UUV任务模块速度,$ {V_B} $ 为蓝方UUV速度。$ r $ 为红方UUV的任务模块极限射距。上述联合攻击策略具有两个优点:1)能够使得红方UUV发射的任务模块有效威胁蓝方UUV,提高红方多UUV整体对抗效能;2)在红方某个UUV受到蓝方UUV或其发射的任务模块威胁时,其他UUV仍然具有对蓝方UUV产生威胁的能力。
4.2 基于任务优先级的多UUV协同角色分配方法
针对从任务层向角色层的角色分配和切换问题,本文设计基于对抗任务的松散耦合的多UUV体系,提出一种多UUV协同方法——基于任务优先级的多UUV协同角色分配算法。
本文研究的多UUV对抗过程环境态势实时变化,因此在红方多UUV角色分配时,UUV的角色也应当是根据实时变化的对抗环境不断变换的。因此需要根据环境和敌我双方态势变化,设计可以动态调整角色任务的多UUV协同角色分配算法,使之能够适应对抗性环境和对抗任务。算法流程如图12所示。
 图 12 分层决策算法流程图Fig. 12 Role assignment algorithm下载:
全尺寸图片
图 12 分层决策算法流程图Fig. 12 Role assignment algorithm下载:
全尺寸图片
分层决策算法的步骤如下:
1)红方多UUV对当前自身态势进行评估和分析,得到当前态势等级分为:低、中、高;
2)根据上文中提出的多UUV分层决策算法,进行多UUV任务分配,确定当前策略;
3)根据不同UUV的任务,确定UUV角色;
4)按照角色各个UUV选择基本行为,展开红蓝双方对抗的底层行为;
5)当前任务是否发生核心攻击UUV失效或红方对抗任务变化?若是,则说明完成一次联合防卫,重新评估威胁等级,转至1)若对抗结束(蓝方或红方对抗总任务失败),结束。
从图12中可以看出,在追踪和返航策略下UUV角色是确定的,而在攻击防卫下就需要对UUV角色进行分配。本文基于贪心算法和市场法提出一种角色分配方法,在UUV策略点选择有冲突时基于贪心算法,对有相同策略点的UUV计算其与策略点的距离,根据距离最短原则确定核心攻击UUV,其余辅助攻击UUV的策略点分配也依照这种原则。当策略点没有冲突时,多UUV的策略点分配则如图13所示,按照“时间均衡原则”。核心攻击UUVj,UUVj的当前位置与其任务点的距离为
$ d $ 。那么辅助攻击UUVi位置$ ({x_i},{y_i}) $ 与其策略点$ ({x_{em}},{y_{em}}) $ 之间的距离可以表示为$$ {d_i} = \sqrt {{{({x_i} - {x_{em}})}^2} + {{({y_i} - {y_{em}})}^2}} $$ (11) 则方差可表示为
$$ {S_m} = \sqrt {{{({d_1} - d)}^2} + {{({d_2} - d)}^2}+\cdots + {{({d_n} - d)}^2}} $$ (12) 令
$F = \min \{ {S_1},{S_2},\cdots,{S_m}\}$ 策略点匹配方案即为所求。 图 13 “时间均衡原则”匹配策略点Fig. 13 Time balance principle下载:
全尺寸图片
图 13 “时间均衡原则”匹配策略点Fig. 13 Time balance principle下载:
全尺寸图片
5. 蓝方策略制定
由于参与对抗的蓝方UUV只有一个,因此蓝方只考虑自身利益选择策略,单个UUV的行为就是蓝方参与对抗时所选择的策略。蓝方UUV策略选择表如表3所示。
6. 仿真分析
6.1 多UUV协同攻防算法有效性分析
仿真实验是在Windows10,QT5.6下进行的。设计实验参数:红方被保护区域的坐标为
$ (30,50) $ ,仿真水域大小为1 050 m×1 050 m,表4所示为红、蓝双方UUV的初始设置。表 3 蓝方UUV策略选择表Table 3 Blue UUV strategy table策略 适用情况 11 向红方基
地运动UUV处于中、低威胁等级,且蓝方未受到任务模块威胁且无攻击目标 22 攻击红
方UUVUUV处于中、低威胁等级,有一个或多个目标,选择威胁程度最大的进行攻击 33 逃逸 UUV处于中、高威胁等级,无攻击能力,蓝方为保存实力放弃任务,逃逸 表 4 红方UUV与蓝方UUV初始速度与位姿Table 4 Initial velocity and pose of red and blue UUVs参数UUV 初始速度与位姿 红方UUV1 $\left[ { {u_{r1} },{v_{r1} },{r_{r1} },{x_{r1} },{y_{r1} },{\psi _{r1} } } \right] =\\\left[ {0.5,0,0,400,200,1.2} \right]$ 红方UUV2 $\left[ { {u_{r{\text{2} } } },{v_{r{\text{2} } } },{r_{r{\text{2} } } },{x_{r{\text{2} } } },{y_{r{\text{2} } } },{\psi _{r{\text{2} } } }} \right] =\\\left[ {0.5,0,0,200,600, - 1.2} \right]$ 红方UUV3 $\left[ { {u_{r3} },{v_{r3} },{r_{r3} },{x_{r3} },{y_{r3} },{\psi _{r3} } } \right] =\\\left[ {0.5,0,0,850,300,2} \right]$ 蓝方UUV $\left[ { {u_b},{v_b},{r_b},{x_b},{y_b},{\psi _b} } \right] = \\\left[ {1,0,0,900,700, - 2.5} \right]$ 从图14中的红方UUV威胁评估等级变化曲线可以看出,红方UUV威胁等级始终处于低或中,说明红方在对抗过程中策略选择适当,红方始终未陷入危险。
分别分析表5中红方UUV对蓝方UUV发起的3次有效攻击过程。蓝色部分为第1次有效攻击;橙色部分时第2次有效攻击,白色部分为最后1次有效攻击。红方多UUV从任务(策略)–角色–行为–运动特性的角度分析,蓝方从态势–策略–行为–运动特性逻辑流分析:
1)红方多UUV:在
$ {t_4} $ 到$ {t_5} $ 过程中红方UUV1和UUV2已经逐渐逼近蓝方UUV,此时纵向速度减小,到达攻击阵位点时,纵向速度最小。作为第一次进攻的核心攻击UUV——红方UUV2首先到达阵位点,并发射任务模块,UUV1随后到达发射任务模块,对蓝方UUV产生威胁。蓝方UUV:$ {t_5} $ 时刻蓝方UUV陷入危险,此时根据表5可知,蓝方UUV采取逃逸策略;同时,在图14、15中可以分别看出$ {t_5} $ 时刻蓝方UUV推力增大,纵向速度增大,艏向发生改变执行逃逸动作。可以看出对抗过程中的第一次正面交锋双方策略选择合理,多UUV角色分配合理,双方运动特性符合所选策略下的基本行为。表 5 攻防过程红蓝UUV行为与态势Table 5 Behavior and situation of red and blue UUVs in attack and defense process时间 红方UUV1 红方UUV2 红方UUV3 红方策略 红方态势 蓝方UUV 蓝方态势 角色 行为 角色 行为 角色 行为 $ [0,{t_1}) $ 追踪
UUV追踪 追踪
UUV追踪 追踪
UUV追踪 驱逐 低 向定点
运动低 $ [{t_1},{t_2}) $ 辅助攻
击UUV向定点
运动核心攻
击UUV向定点
运动辅助攻
击UUV向定点
运动攻击–防卫 低 向定点
运动低 $ [{t_2},{t_3}) $ 辅助攻
击UUV向定点
运动核心攻
击UUV向定点
运动辅助攻
击UUV向定点
运动攻击–防卫 低 朝UUV3发射任务 中 $ [{t_3},{t_4}) $ 辅助攻
击UUV向定点
运动核心攻
击UUV向定点
运动辅助攻
击UUV逃逸 攻击–防卫 低 朝UUV3发射任务 中 $ [{t_4},{t_5}) $ 辅助攻
击UUV向定点
运动、发射任务模块核心攻
击UUV向定点
运动、发射任务模块辅助攻
击UUV逃逸 攻击–防卫 中 模块、向定
点运动中低 $ [{t_5},{t_6}) $ 追踪
UUV追踪 追踪
UUV追踪 追踪
UUV追踪 驱逐 中 逃逸、朝UUV3发射任务模块 高低 $ [{t_6},{t_7}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV追踪 驱逐 中 逃逸、朝UUV3发射任务模块 中低 $ [{t_7},{t_8}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV逃逸 驱逐 中 逃逸 中低 $ [{t_8},{t_9}) $ 辅助攻
击UUV向定点
运动辅助攻
击UUV向定点
运动核心攻
击UUV发射任
务模块攻击–防卫 低 逃逸 低 $ [{t_9},{t_{10}}) $ 追踪
UUV追踪 追踪
UUV追踪 追踪
UUV追踪 驱逐 低 逃逸 中低 $ [{t_{10}},{t_{11}}) $ 核心攻
击UUV发射任
务模块辅助攻
击UUV向定点
运动辅助攻
击UUV向定点
运动攻击–防卫 低 逃逸 低 $ [{t_{11}},{t_{12}}) $ 追踪
UUV追踪 追踪
UUV追踪 追踪
UUV追踪 驱逐 中 逃逸 低 $ [{t_{12}},{t_{13}}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV追踪 驱逐 低 逃逸 低 $ [{t_{13}},{t_{14}}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV追踪 驱逐 低 朝UUV3发射任务模块、逃逸 高低 $ [{t_{14}},{t_{15}}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV逃逸 驱逐 低 逃逸 低 $ [{t_{15}},{t_{16}}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV逃逸 驱逐 低 向定点
运动低 $ [{t_{16}},{t_{17}}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV追踪 驱逐 低 向定点
运动低 $ [{t_{17}},{t_{18}}) $ 核心攻
击UUV向定点
运动辅助攻
击UUV向定点
运动辅助攻
击UUV向定点
运动攻击–防卫 低 向定点
运动低 $ [{t_{18}}, - ) $ 追踪
UUV追踪 追踪
UUV追踪 追踪
UUV追踪 驱逐 低 逃逸 高  图 14 红蓝UUV纵向速度与艏向角变化及威胁评估等级Fig. 14 Longitudinal velocity and heading angle of red and blue UUV and threat assessment level下载:
全尺寸图片
图 14 红蓝UUV纵向速度与艏向角变化及威胁评估等级Fig. 14 Longitudinal velocity and heading angle of red and blue UUV and threat assessment level下载:
全尺寸图片
2)红方多UUV:由于经历上一次攻击后,红方UUVs都在蓝方UUV附近,只需要通过调整艏向即可到达阵位点。UUV1和UUV3在第二次有效攻击过程中分别承担核心攻击UUV,从图13中可以看出UUV1和UUV3调整艏向到达阵位点。从图14可以看出UUV2作为辅助攻击UUV通过推力控制使得其运动始终平稳,承担追踪和辅助攻击角色。蓝方UUV:从表5可以看出红方UUV在此过程中两次向蓝方UUV发射任务模块,导致在
$ {t_9} $ 、$ {t_{13}} $ 时刻蓝方UUV调整艏向逃逸。可以看出红方多UUV策略选择成功,对蓝方产生威胁,但蓝方凭借优于红方的机动能力逃脱。3)红方UUV:红方UUV采取追踪策略,调整艏向,追踪蓝方。由于UUV3进入蓝方探测范围,被蓝方攻击,在
$ {t_{14}} $ 时刻UUV3推力增大,纵向速度增加,执行逃逸行为。蓝方UUV:由于任务模块耗尽,态势评估自动评估为高,为保存实力撤退,导致任务失败。6.2 多UUV协同攻防算法优越性分析
本文的重点和创新点在于多UUV分层决策算法,该算法的核心是多UUV分布式合作,根据整体的威胁态势切换策略,根据策略要求,按照各自角色选择行为。针对多UUV的行为选择,为了避免冲突,设计基于任务优先级的行为选择算法。如图16所示为未设计优先级的多UUV攻防对抗仿真,由于红方多UUVs在事先未设计优先级,如左图UUV2和UUV3同时选择同一个策略点前进,导致距离过近来不及躲避,使得执行任务时产生冲突,最终导致任务失败。
 图 15 红蓝方UUV推力Fig. 15 UUV thrust下载:
全尺寸图片
图 15 红蓝方UUV推力Fig. 15 UUV thrust下载:
全尺寸图片
 图 16 多UUV对抗冲突Fig. 16 UUV conflict behavior下载:
全尺寸图片
图 16 多UUV对抗冲突Fig. 16 UUV conflict behavior下载:
全尺寸图片
7. 结束语
本文主要研究水下多UUV协同对抗策略选择问题,设计以保护基地为背景的水下UUV“多对一”攻防对抗仿真实验。本研究与以往多UUV对抗问题研究的不同点在于,不是仅研究UUV的机动围捕问题,而是研究集成具有打击能力任务载荷的UUV的对抗问题;与以往研究具有打击能力无人平台对抗的不同在于,设计了对抗双方机动能力和打击能力的差异性。不同于以往的基于编队的多智能体协同,而是根据对抗环境提出蓝方对抗策略和红方多UUV动态角色分配方法,利用角色分工与任务优先级法对红方UUV群体进行协调。在研究中,考虑实际对抗情形,基于蓝方UUV航向偏角的大小提出红方多UUV联合对抗策略,提高红方UUV作战效能。通过设计仿真实验验证了本文所提角色分配方法和红蓝双方策略设计的合理性,完成“以弱胜强,以多敌寡”的多UUV水下攻防对抗过程。
-
图 1 对抗情形
Fig. 1 Confrontation situation
下载:
全尺寸图片
图 2 基于增量式PID的UUV运动控制框图
Fig. 2 UUV motion controller based on incremental PID
下载:
全尺寸图片
图 3 针对任务模块的逃逸方向
Fig. 3 Escape direction for mission modules
下载:
全尺寸图片
图 4 针对来袭UUV的逃逸方向
Fig. 4 Escape direction for incoming UUV
下载:
全尺寸图片
图 5 UUV朝某点运动
Fig. 5 UUV moving towards a point
下载:
全尺寸图片
图 6 UUV追踪行为
Fig. 6 UUV Tracking Behavior
下载:
全尺寸图片
图 7 红方多UUV任务及角色行为示意图
Fig. 7 Red UUVs task and role behavior diagram
下载:
全尺寸图片
图 8 目标航向偏角与目标距离
Fig. 8 Target heading angle and target distance
下载:
全尺寸图片
图 9 UUV攻击方式
Fig. 9 UUV attack mode
下载:
全尺寸图片
图 10 蓝方UUV大航向偏角红方多UUV联合防卫方法
Fig. 10 Blue UUV large heading angle red UUVs joint defense method
下载:
全尺寸图片
图 11 蓝方UUV中小航向偏角红方多UUV联合防卫方法
Fig. 11 Blue side UUV small heading angle red side UUVs joint defense method
下载:
全尺寸图片
图 12 分层决策算法流程图
Fig. 12 Role assignment algorithm
下载:
全尺寸图片
图 13 “时间均衡原则”匹配策略点
Fig. 13 Time balance principle
下载:
全尺寸图片
图 14 红蓝UUV纵向速度与艏向角变化及威胁评估等级
Fig. 14 Longitudinal velocity and heading angle of red and blue UUV and threat assessment level
下载:
全尺寸图片
图 15 红蓝方UUV推力
Fig. 15 UUV thrust
下载:
全尺寸图片
图 16 多UUV对抗冲突
Fig. 16 UUV conflict behavior
下载:
全尺寸图片
表 1 红蓝UUV配置参数
Table 1 Configuration parameters of red and blue UUVs
UUV 数量/台 速度 探测声呐 任务模块 正常航行速
度/ (m·s−1)最大航行速
度/(m·s−1)探测范
围/m开角/(°) 数量/枚 速度/
(m·s−1)作用距
离/m毁伤半
径/m红方UUV 3 ${V_{\rm nor} }$ $ {V_{\max }} $ $ D $ $ A $ 2 $ {V_m} $ $ L $ $ R $ 蓝方UUV 1 ${\text{2} }{V_{\rm nor} }$ $ {\text{1}}{\text{.5}}{V_{\max }} $ $ {\text{1}}{\text{.5}}D $ $ {\text{1}}{\text{.2}}A $ 3 $ {\text{1}}{\text{.5}}{V_m} $ $ {\text{1}}{\text{.2}}L $ $ {\text{1}}{\text{.5}}R $ 表 2 红方多UUV任务选择及相应参数表
Table 2 Red side multi UUV task selection and corresponding parameter table
任务(策略) 角色种类 适用情况 具体描述 1 驱逐 追踪UUV
返航UUV中、低威胁评估等级且无可攻
红方UUV
蓝方状态不稳定选择返航UUV时,优先考虑距离,距离基地最近的红方UUV执行返航任务;其余所有UUV均为追踪UUV,任务优先级相同,当追踪UUV中出现任务点冲突时,则距离蓝方UUV距离越近的UUV,其优先级越高 2 紧急返回 返航UUV 高威胁等级且红方无可攻UUV 所有红方UUV均为返航UUV,执行返回基地保护基地任务。任务优先级相同,出现冲突时,则距离基地距离越近的UUV,其优先级越高 3 攻击防卫 核心攻击UUV 高威胁等级且红方有可攻UUV 基于“距离最短”分配策略点,在可攻UUV中选择离自身阵位点最近的作为核心攻击UUV 攻击防卫 辅助攻击UUV 中、低威胁等级且红方有可攻UUV时 基于“时间均衡”分配辅助攻击UUV的策略点,求解一组策略点使得所有辅助攻击UUV到达策略点的时间差异最小 表 3 蓝方UUV策略选择表
Table 3 Blue UUV strategy table
策略 适用情况 11 向红方基
地运动UUV处于中、低威胁等级,且蓝方未受到任务模块威胁且无攻击目标 22 攻击红
方UUVUUV处于中、低威胁等级,有一个或多个目标,选择威胁程度最大的进行攻击 33 逃逸 UUV处于中、高威胁等级,无攻击能力,蓝方为保存实力放弃任务,逃逸 表 4 红方UUV与蓝方UUV初始速度与位姿
Table 4 Initial velocity and pose of red and blue UUVs
参数UUV 初始速度与位姿 红方UUV1 $\left[ { {u_{r1} },{v_{r1} },{r_{r1} },{x_{r1} },{y_{r1} },{\psi _{r1} } } \right] =\\\left[ {0.5,0,0,400,200,1.2} \right]$ 红方UUV2 $\left[ { {u_{r{\text{2} } } },{v_{r{\text{2} } } },{r_{r{\text{2} } } },{x_{r{\text{2} } } },{y_{r{\text{2} } } },{\psi _{r{\text{2} } } }} \right] =\\\left[ {0.5,0,0,200,600, - 1.2} \right]$ 红方UUV3 $\left[ { {u_{r3} },{v_{r3} },{r_{r3} },{x_{r3} },{y_{r3} },{\psi _{r3} } } \right] =\\\left[ {0.5,0,0,850,300,2} \right]$ 蓝方UUV $\left[ { {u_b},{v_b},{r_b},{x_b},{y_b},{\psi _b} } \right] = \\\left[ {1,0,0,900,700, - 2.5} \right]$ 表 5 攻防过程红蓝UUV行为与态势
Table 5 Behavior and situation of red and blue UUVs in attack and defense process
时间 红方UUV1 红方UUV2 红方UUV3 红方策略 红方态势 蓝方UUV 蓝方态势 角色 行为 角色 行为 角色 行为 $ [0,{t_1}) $ 追踪
UUV追踪 追踪
UUV追踪 追踪
UUV追踪 驱逐 低 向定点
运动低 $ [{t_1},{t_2}) $ 辅助攻
击UUV向定点
运动核心攻
击UUV向定点
运动辅助攻
击UUV向定点
运动攻击–防卫 低 向定点
运动低 $ [{t_2},{t_3}) $ 辅助攻
击UUV向定点
运动核心攻
击UUV向定点
运动辅助攻
击UUV向定点
运动攻击–防卫 低 朝UUV3发射任务 中 $ [{t_3},{t_4}) $ 辅助攻
击UUV向定点
运动核心攻
击UUV向定点
运动辅助攻
击UUV逃逸 攻击–防卫 低 朝UUV3发射任务 中 $ [{t_4},{t_5}) $ 辅助攻
击UUV向定点
运动、发射任务模块核心攻
击UUV向定点
运动、发射任务模块辅助攻
击UUV逃逸 攻击–防卫 中 模块、向定
点运动中低 $ [{t_5},{t_6}) $ 追踪
UUV追踪 追踪
UUV追踪 追踪
UUV追踪 驱逐 中 逃逸、朝UUV3发射任务模块 高低 $ [{t_6},{t_7}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV追踪 驱逐 中 逃逸、朝UUV3发射任务模块 中低 $ [{t_7},{t_8}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV逃逸 驱逐 中 逃逸 中低 $ [{t_8},{t_9}) $ 辅助攻
击UUV向定点
运动辅助攻
击UUV向定点
运动核心攻
击UUV发射任
务模块攻击–防卫 低 逃逸 低 $ [{t_9},{t_{10}}) $ 追踪
UUV追踪 追踪
UUV追踪 追踪
UUV追踪 驱逐 低 逃逸 中低 $ [{t_{10}},{t_{11}}) $ 核心攻
击UUV发射任
务模块辅助攻
击UUV向定点
运动辅助攻
击UUV向定点
运动攻击–防卫 低 逃逸 低 $ [{t_{11}},{t_{12}}) $ 追踪
UUV追踪 追踪
UUV追踪 追踪
UUV追踪 驱逐 中 逃逸 低 $ [{t_{12}},{t_{13}}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV追踪 驱逐 低 逃逸 低 $ [{t_{13}},{t_{14}}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV追踪 驱逐 低 朝UUV3发射任务模块、逃逸 高低 $ [{t_{14}},{t_{15}}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV逃逸 驱逐 低 逃逸 低 $ [{t_{15}},{t_{16}}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV逃逸 驱逐 低 向定点
运动低 $ [{t_{16}},{t_{17}}) $ 返航
UUV向定点
运动追踪
UUV追踪 追踪
UUV追踪 驱逐 低 向定点
运动低 $ [{t_{17}},{t_{18}}) $ 核心攻
击UUV向定点
运动辅助攻
击UUV向定点
运动辅助攻
击UUV向定点
运动攻击–防卫 低 向定点
运动低 $ [{t_{18}}, - ) $ 追踪
UUV追踪 追踪
UUV追踪 追踪
UUV追踪 驱逐 低 逃逸 高 -
[1] 陈强. 水下无人航行器[M]. 北京: 国防工业出版社, 2014: 1−2. CHEN Qiang. Unmanned underwater vehicle[M]. Beijing: National Defense Industry Press, 2014: 1−2. [2] WILLCOX S, GOLDBERG D, VAGANAY J, et al. Multi-vehicle cooperative navigation and autonomy with the bluefin CADRE system[C]//Proceedings of IFAC (International Federation of Automatic Control) Conference. [S.l.],2006: 20−22. [3] LI Ning, CÜRÜKLÜ B, BASTOS J, et al. A probabilistic and highly efficient topology control algorithm for underwater cooperating AUV networks[J]. Sensors, 2017, 17(5): 1022. doi: 10.3390/s17051022 [4] GAO Zhenyu, GUO Ge. Fixed-time leader-follower formation control of autonomous underwater vehicles with event-triggered intermittent communications[J]. IEEE access, 2018, 6: 27902–27911. doi: 10.1109/ACCESS.2018.2838121 [5] YAN Zheping, XU Da, CHEN Tao, et al. Leader-follower formation control of UUVs with model uncertainties, current disturbances, and unstable communication[J]. Sensors, 2018, 18(2): 662. doi: 10.3390/s18020662 [6] 魏娜, 刘明雍, 张帅, 等. 基于协同对抗的水下博弈策略优化[J]. 西北工业大学学报, 2019, 37: 63–69. doi: 10.3969/j.issn.1000-2758.2019.01.010 WEI Na, LIU Mingyong, ZHANG Shuai, et al. Optimizing underwater game strategy based on cooperative confrontation[J]. Journal of Northwestern Polytechnical University, 2019, 37: 63–69. doi: 10.3969/j.issn.1000-2758.2019.01.010 [7] 邓鹏, 李伟, 王新华. 水下无人平台“蜂群”作战体系研究[J]. 兵器装备工程学报, 2018, 39(8): 8–10. doi: 10.11809/bqzbgcxb2018.08.002 DENG Peng, LI Wei, WANG Xinhua. Research on battle system of “swarm” of underwater unmanned veicle (UUV)[J]. Journal of ordnance equipment engineering, 2018, 39(8): 8–10. doi: 10.11809/bqzbgcxb2018.08.002 [8] 冯卉, 毛红保, 吴天爱. 侦察打击一体化无人机关键技术及其发展趋势分析[J]. 飞航导弹, 2014(3): 42–46. https://www.cnki.com.cn/Article/CJFDTOTAL-FHDD201403015.htm FENG Hui, MAO Hongbao, WU Tianai. Analysis on key technologies and deelopment trend of reconnaissance strike integrated UAV[J]. Aerodynamic missile journal, 2014(3): 42–46. https://www.cnki.com.cn/Article/CJFDTOTAL-FHDD201403015.htm [9] 张昊. 无人系统作战样式分析[J]. 飞航导弹, 2020(6): 50–54. https://www.cnki.com.cn/Article/CJFDTOTAL-FHDD202006011.htm Zhang Hao. Operational style analysis of unmanned systems[J]. Aerodynamic missile journal, 2020(6): 50–54. https://www.cnki.com.cn/Article/CJFDTOTAL-FHDD202006011.htm [10] GREGORIN L, FREIRE E, CARVALHO E, et al. Evolutionary robotics applied to the multi-robot worst-case pursuit-evasion problem[C]//Proceedings of the 7th Annual Ubiquitous Computing, Electronics & Mobile Communication Conference. New York, USA, 2016: 1−7. [11] HUANG Haomiao, ZHANG Wei, DING J, et al. Guaranteed decentralized pursuit-evasion in the plane with multiple pursuers[C]//Proceedings of the 50th IEEE Conference on Decision and Control and European Control Conference. Orlando, USA, 2011: 4835−4840. [12] WANG Chen, ZHANG Ting, WANG Kai, et al. A new approach of multi-robot cooperative pursuit[C]//Proceedings of the 32nd Chinese Control Conference. Xi’an, China, 2013: 7252−7256. [13] ZHU Daqi, LV Ruofan, CAO Xiang, et al. Multi-AUV hunting algorithm based on bio-inspired neural network in unknown environments[J]. International journal of advanced robotic systems, 2015, 12(11): 1–166. http://d.wanfangdata.com.cn/conference/ChZDb25mZXJlbmNlTmV3UzIwMjAxMDI2EgxDQzAyMTQ5OTkwMzcaCGE3bzNpamlt [14] BODÓ Z, HARMATI I. High-level strategy design in RoboCup environment[C]//Proceedings of the 16th IEEE International Symposium on Computational Intelligence and Informatics. Budapest, Hungary, 2015: 129−134. [15] 王杰. 多AUV围捕决策与行为协同控制研究[D]. 哈尔滨: 哈尔滨工程大学, 2018: 45−60. WANG Jie. Research on multi-AUVs hunting decision-making and behavior cooperative[D]. Harbin: Harbin Engineering University, 2018: 45−60. [16] 郭胜伟. 无人化战争[M]. 北京: 国防大学出版社, 2011: 9−11. GUO Shengwei. Unmanned war[M]. Beijing: National Defense University Press, 2011: 9−11. [17] 魏瑞轩, 李学仁. 无人机系统及作战使用[M]. 北京: 国防工业出版社, 2009: 27−29. WEI Ruixuan, LI Xueren. UAV system and operational use[M]. Beijing: National Defense Industry Press, 2009: 27−29. [18] 赵民全. 基于改进遗传算法的多无人机协同任务规划[J]. 舰船电子对抗, 2020, 43(4): 44–47. https://www.cnki.com.cn/Article/CJFDTOTAL-JCDZ202004009.htm ZHAO Minquan. Collaborative task planning for multi-UAV based on modified genetic algorithm[J]. Shipboard electronic countermeasure, 2020, 43(4): 44–47. https://www.cnki.com.cn/Article/CJFDTOTAL-JCDZ202004009.htm [19] BRAND M, MASUDA M, WEHNER N, et al. Ant Colony Optimization algorithm for robot path planning[C]//Proceedings of 2010 International Conference on Computer Design and Applications. Qinhuangdao, China, 2010. [20] BHATTACHARJEE P, RAKSHIT P, GOSWAMI I, et al. Multi-robot path-planning using artificial bee colony optimization algorithm[C]//Proceedings of the Third World Congress on Nature and Biologically Inspired Computing. Salamanca, Spain, 2011: 219−224. [21] 吴虎胜, 张凤鸣, 吴庐山. 一种新的群体智能算法——狼群算法[J]. 系统工程与电子技术, 2013, 35(11): 2430–2438. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201311034.htm WU Husheng, ZHANG Fengming, WU Lushan. New swarm intelligence algorithm——wolf pack algorithm[J]. Journal of systems engineering and electronics, 2013, 35(11): 2430–2438. https://www.cnki.com.cn/Article/CJFDTOTAL-XTYD201311034.htm [22] DAHL T S, MATARIĆ M, SUKHATME G S. Multi-robot task allocation through vacancy chain scheduling[J]. Robotics and autonomous systems, 2009, 57(6/7): 674–687. doi: 10.1016/j.robot.2008.12.001 [23] MCGREW J S, HOW J P, WILLIAMS B, et al. Air-combat strategy using approximate dynamic programming[J]. Journal of guidance, control, and dynamics, 2010, 33(5): 1641–1654. doi: 10.2514/1.46815 [24] SURESH M, GHOSE D. UAV grouping and coordination tactics for ground attack missions[J]. IEEE transactions on aerospace and electronic systems, 2012, 48(1): 673–692. doi: 10.1109/TAES.2012.6129663 [25] 罗德林, 张海洋, 谢荣增, 等. 基于多agent系统的大规模无人机集群对抗[J]. 控制理论与应用, 2015, 32(11): 1498–1504. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201511010.htm LUO Delin, ZHANG Haiyang, XIE Rongzeng, et al. Unmanned aerial vehicles swarm conflict based on multi-agent system[J]. Control theory & applications, 2015, 32(11): 1498–1504. https://www.cnki.com.cn/Article/CJFDTOTAL-KZLY201511010.htm [26] FAN Jieru, LI Dongguang, LI Rupeng, et al. Analysis on MAV/UAV cooperative combat based on complex network[J]. Defence technology, 2020, 16(1): 150–157. doi: 10.1016/j.dt.2019.09.002 [27] MUHAMMED D, ANISI M H, ZAREEI M, et al. Game theory-based cooperation for underwater acoustic sensor networks: taxonomy, review, research challenges and directions[J]. Sensors, 2018, 18(2): 425. doi: 10.3390/s18020425 [28] 徐欣. 面向区域防卫任务的UUV协同攻防方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2020: 66−67. XU Xin. Research on multi UUV countermeasure method based on base defense[D]. Harbin: Harbin Engineering University, 2020: 66−67. [29] 郭银景, 刘琦, 鲍建康, 等. 基于人工势场法的AUV避障算法研究综述[J]. 计算机工程与应用, 2020, 56(4): 16–23. doi: 10.3778/j.issn.1002-8331.1910-0464 GUO Yinjing, LIU Qi, BAO Jiankang, et al. Overview of AUV obstacle avoidance algorithm based on artificial potential field method[J]. Computer engineering and applications, 2020, 56(4): 16–23. doi: 10.3778/j.issn.1002-8331.1910-0464 [30] 周东波. 面向典型任务的UUV空间运动规划方法研究[D]. 哈尔滨: 哈尔滨工程大学, 2014: 82−83. ZHOU Dongbo. Research on UUV spatial motion planning method for typical tasks[D]. Harbin: Harbin Engineering University, 2014: 82−83. [31] 黄斌. 潜艇艇群反航母协同作战仿真试验[J]. 舰船科学技术, 2013, 35(6): 75–79. doi: 10.3404/j.issn.1672-7649.2013.06.017 HUANG Bin. Analysis of the joint operation simulation test of the submarine group against aircraft carrier[J]. Ship science and technology, 2013, 35(6): 75–79. doi: 10.3404/j.issn.1672-7649.2013.06.017




















































































