

DOI: 10.11992/tis.201510017


多机器人编队系统相比复杂单机器人系统具有诸多优点,在工业制造、地理勘测、太空探索等领域具有广泛的应用前景,目前已成为研究的热点问题之一。多机器人编队控制方法主要有行为法[1]、虚拟结构法[2]、领航—跟随法[3-4]及人工势场法[5]等。其中,领航—跟随法因其控制简单,易于实现分布式控制,可将整个编队控制问题简化为若干独立的轨迹跟踪控制问题,在多机器人编队控制方面应用广泛。采用领航—跟随法,常用的控制算法有反馈线性化[6]、预测控制[7]、滑模控制[8-9]及智能控制[10-11]等。
就模型而言,多机器人编队控制分为基于运动学模型的控制和基于动力学模型的控制。在实际应用中,多机器人编队系统受到负载变化、参数摄动、测量噪声、摩擦、传动系统的非线性及外部扰动等不确定性的影响[3]。基于模型的控制方法难以克服不确定的影响,需要探寻更加有效的控制策略。
滑模控制具有不变性的特点,因其鲁棒性强、响应快速和易于实现等特点被广泛地研究[6, 10]。在滑模控制器设计中,为保证控制系统的稳定性,通常要假设已知不确定性的上界。就多机器人编队控制问题而言,这个假设在实际中可能难以满足。模糊逻辑具有以任意精度逼近非线性连续函数的能力[10],是估计系统中不确定性的可行方法。
针对未知上界的不确定性,本文结合滑模控制和模糊逻辑,研究了多机器人系统编队控制问题。首先,根据跟随者与领航者的相对位置与相对相角,建立编队系统的动力学模型;然后,采用模糊推理系统逼近系统中的不确定性,设计滑模控制器稳定相对位置与相对相角,应用Lyapunov条件证明控制系统的稳定性和逼近误差的收敛性;最后,通过仿真实验验证所提出方法的有效性。
1 系统描述本文以半径为r的圆形非完整轮式移动机器人为对象,其理想运动学和动力学模型见文献[9]。采用领航-跟随者编队方法,在一组由n个非完整移动机器人组成的编队系统中,选机器人i为领航者,剩余n-1个为跟随者。在跟随者中,选择跟随者k与领航者i组成编队控制模型,其结构如图 1所示。
在图 1中,跟随者k与领航者i的相对相角和相对距离分别为
 |
(1) |
 |
(2) |

|
| 图 1 跟随—领航者编队控制模型 Fig. 1 Leader-follower formation of multiple robots |
式中:
对相对相角(1) 和位置(2) 求二阶导,令xik=[x1 x2]T=[lik ψik]T,得到跟随-领航者编队控制的动力学模型的状态空间表达式为
 |
(3) |
令φik=ψik+θi-θk,各参数矩阵描述如下
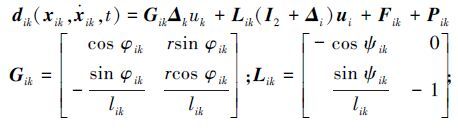 |
I2是2×2单位矩阵;Fik=[F1 F2]T;Pik=[P1 P2]T;Δk和Δi是2×2扰动矩阵;
 |
式中:πkx、πky、πkθ、πix、πiy和πiθ∈R1分别为领航者和跟随者的不确定性。
建模中主要假设为:领航者与跟随者之间无通讯延迟;领航者与跟随者均可知自身位置和速度;领航者通过通讯将其位置和速度传递给跟随者。
2 控制系统设计及稳定性分析 2.1 模糊补偿器的设计模糊推理系统(FIS)的数学本质是从集合U∈Rm到V∈Rn的非线性映射,其结构图如图 2所示。在图 2中,输入向量a=[a1 a2 … am]T∈U,输出向量b=[b1 b2 … bn]T∈ V,第l条模糊规则为
 |
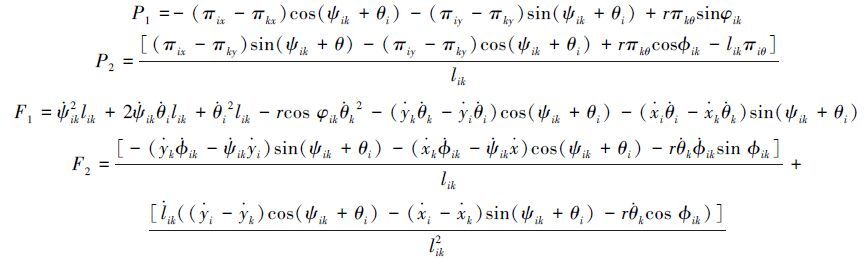
式中:Apl(p=1, 2, …, m)和Bql(q=1, 2, …,n)分别为第l条规则中语言变量的模糊集合。采用单值模糊器、乘积模糊机和中心平均解模糊器,则FIS的第q个输出为
 |
(4) |

|
| 图 2 模糊推理系统结构图 Fig. 2 Structure of the FIS |
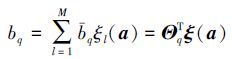
式中:ξ(a)=[ξ1(a) ξ2(a) … ξM(a)]T,Θq=[bq1 bq2 … bqM]T,且Θq为参数矩阵ΘM×n的第q列,M为模糊规则总数。ξ(a)是模糊基函数向量,其中的第l个元素可表示为
 |
(5) |
式中μA pl(ap)为高斯型隶属函数。
 |
(6) |
式中cp和σp分别代表此隶属函数的中心和宽度。
针对多机器人编队设计FIS,FIS的输入为a=

FIS的输入与输出变量均模糊化为负大(NB),负小(NS),零(ZO),正小(PS)和正大(PB)5个模糊子集,即Apl=Bpl={NB, NS, ZO, PS, PB}。所设计的FIS第l条模糊规则如下:
 |
根据式(4) ,不确定性的逼近值可描述为
 |
(7) |
式中:参数矩阵
设Θ存在最优参数矩阵Θ*,且Θ*满足
 |
(8) |
式中:χ0为包含Θ的有界集合。
定义逼近误差的最小值向量为
 |
(9) |
式中:ρ=[ρ1 ρ2]T∈R2×1。
针对多机器人编队设计的FIS是一个4输入2输出系统,输入变量具有5个模糊子集,所以FIS的规则库有54条模糊规则,即M=625。
2.2 滑模控制器的设计定义滑模面
 |
(10) |
式中:sik(t)=[sik, 1(t) sik, 2(t)]T∈R2×1,xeik=xik-xdik∈R2×1为跟踪误差向量,xdik为期望轨迹向量,λ为一个2×2的正定矩阵。
定义参考向量δ
 |
(11) |
设计滑模控制律
 |
(12) |
式中: κ和η均为2×2的对角矩阵,即κ=diag(κ1, κ2),η=diag(η1, η2),其中κ1、κ2、η1和η2为设计参数;sign(sik)=[sign(sik, 1) sign(sik, 2)]T,sign(·)为符号函数。
2.3 稳定性证明定理1 对于机器人编队系统式(5) ,设计模糊补偿器式(7) 和滑模控制律式(12) 。如定义参数自适应律为
 |
(13) |
式中:Γq>0∈R1,κq>0,ηq>|ρq|(q=1, 2) ,那么多机器人编队控制系统式(5) 是渐近稳定的。
证明选取李雅普诺夫函数:
 |
(14) |
式中:
 |
(15) |
由式(10) 和式(11) 可知
 |
(16) |
将式(3) 和式(16) 依次代入式(15) 可得
 |
(17) |
将式(9) 和式(12) 代入式(17) 可得
 |
(18) |
将参数自适应律式(13) 代入式(18) 可得
 |
(19) |
考虑ηq>|ρq|,将其代入式(19) 可得
 |
(20) |
因此,基于滑模和模糊补偿器的编队控制系统具有渐近稳定性。
3 仿真结果根据上文设计的控制器进行仿真实验,验证该方法的有效性。采用模糊补偿器和滑模控制器的控制方法结构图如图 3所示。

|
| 图 3 控制方法结构图 Fig. 3 Structure of control scheme |
设圆形机器人的半径r=0.05 m;选择15%的参数波动Δi=Δk=diag(rand, rand),式中rand表示一个在闭区间[-0.15, 0.15]上均匀分布的随机数;考虑如下周期性外部扰动πix=πiy=πiθ=0.5sin(2πt);πkx=πky=πkθ=0.2sin(πt)。
设领航者i=1,跟随者k=2、3。选取控制器参数:高斯型隶属函数方差
仿真实验的给定编队任务,3个机器人从初始位置,先完成直线编队,然后保持队形跟踪圆形轨迹。初始位置设置为τ1=[0.5 m 0m π/2 rad]T,τ2=[0.8 m-0.4m 0 rad]T,τ3=[1 m-0.5 m π rad]T。领航者跟踪圆形轨迹的线速度v1d=0.5 m/s,角速度w1d=1 rad/s。领航者与2个跟随者期望距离和相角分别为xd12=[0.13 m π/2rad]T,x13d=[0.26 m π/2rad]T。编队效果如图 4所示,图中的实心圆点表示初始位置,空心圆点表示动态过程中的位置。

|
| 图 4 直线编队跟踪圆形轨迹 Fig. 4 Line formation while moving in a circle |
采用文[12]中一阶滑模控制方法和二阶滑模控制方法与本文所提出模糊补偿器与滑模控制器相结合的控制方法进行对比实验,仿真结果如图 5~8所示。从图 5看出,在不确定性上界未知的假设条件下,带模糊补偿器的滑模控制方法可以使3个机器人迅速地收敛到期望队形,并以较高的跟踪精度保持期望队形运动;滑模控制方法的动态响应时间较长,且由于不确定性的影响在编队形成后存在明显波动。

|
| 图 5 状态轨迹 Fig. 5 State trajectories |
滑模控制的不连续性导致了控制器输出存在抖振现象,如图 6和图 7,用饱和函数替换式(12) 中的符号函数可以改善这种现象。从图 8看出,当编队系统进入滑动模态后,由于不确定性的影响会使系统在滑模面附近产生抖动,但此时lik和ψik已进入平衡点邻域内,故系统保持局部渐近稳定。由图 9可知,模糊补偿器可以有效地跟踪编队系统的未知的不确定项。

|
| 图 6 跟随者2的控制量 Fig. 6 Control variables of follower 2 |

|
| 图 7 跟随者3的控制量 Fig. 7 Control variables of follower 3 |

|
| 图 8 滑模面向量的三维图 Fig. 8 3 D plots of the sliding surfaces vector |

|
| 图 9 不确定项dik及其逼近值 Fig. 9 The uncertain term and its approximations |
本文针对多机器人编队控制问题,提出了一种模糊补偿器与滑模控制器相结合的控制方法。运用领航—跟随法建立系统动力学模型,将整个编队控制问题转化为若干跟随者的轨迹跟踪问题。利用模糊逻辑和滑模控制方法对跟随者设计模糊补偿器和滑模控制器,并证明系统的稳定性。仿真结果与滑模编队控制方法进行对比,验证了本文所提出的控制方法可以有效的克服未知上界的不确定性对编队系统的影响;实现多机器人编队在期望队形下对指定轨迹的跟踪。
| [1] | HUDA M N, YU Hongnian, CANG Shuang. Behaviour-based control approach for the trajectory tracking of an underactuated planar capsule robot[J]. IET control theory & applications , 2015, 9 (2) : 163-175 |
| [2] | SADOWSKA A, VAN DEN BROEK T, HUIJBERTS H, et al. A virtual structure approach to formation control of unicycle mobile robots using mutual coupling[J]. International journal of control , 2011, 84 (11) : 1886-1902 DOI:10.1080/00207179.2011.627686 |
| [3] | 杨丽, 曹志强, 谭民. 不确定环境下多机器人的动态编队控制[J]. 机器人 , 2010, 32 (2) : 283-288 YANG Li, CAO Zhiqiang, TAN Min. Dynamic formation control for multiple robots in uncertain environments[J]. Robot , 2010, 32 (2) : 283-288 DOI:10.3724/SP.J.1218.2010.00283 |
| [4] | WANG Jinliang, WU Huaining. Leader-following formation control of multi-agent systems under fixed and switching topologies[J]. International journal of control , 2012, 85 (6) : 695-705 DOI:10.1080/00207179.2012.662720 |
| [5] | 王奎民, 赵玉飞, 侯恕萍, 等. 一种改进人工势场的UUV动碍航物规避方法[J]. 智能系统学报 , 2014, 9 (1) : 47-52 WANG Kuimin, ZHAO Yufei, HOU Shuping, et al. Dynamic obstacle avoidance for unmanned underwater vehicle based on an improved artificial potential field[J]. CAAI transactions on intelligent systems , 2014, 9 (1) : 47-52 |
| [6] | ZHAO Weihua, GO T H. Quadcopter formation flight control combining MPC and robust feedback linearization[J]. Journal of the franklin institute , 2014, 351 (3) : 1335-1355 DOI:10.1016/j.jfranklin.2013.10.021 |
| [7] | GUILLET A, LENAIN R, THUILOT B, et al. Adaptable robot formation control:adaptive and predictive formation control of autonomous vehicles[J]. IEEE robotics & automation magazine , 2014, 21 (1) : 28-39 |
| [8] | LIU Hui, LI Junfeng. Terminal sliding mode control for spacecraft formation flying[J]. IEEE transactions on aerospace and electronic systems , 2009, 45 (3) : 835-846 DOI:10.1109/TAES.2009.5259168 |
| [9] | QIAN Dianwei, TONG Shiwen, GUO Jinrong, et al. Leader-follower-based formation control of nonholonomic mobile robots with mismatched uncertainties via integral sliding mode[J]. Proceedings of the institution of mechanical engineers, part I:journal of systems and control engineering , 2015, 229 (6) : 559-569 DOI:10.1177/0959651814568365 |
| [10] | 袁媛, 焦继乐, 曹志强, 等. 基于模糊控制协调策略的多自主机器人围捕[J]. 华中科技大学学报:自然科学版 , 2011, 39 (S2) : 328-331 YUAN Yuan, JIAO Jile, CAO Zhiqiang, et al. Fuzzy control coordination based hunting of multiple autonomous robots[J]. Journal of Huazhong university of science and technology:natural science edition , 2011, 39 (S2) : 328-331 |
| [11] | 王雪松, 高阳, 程玉虎, 等. 知识引导遗传算法实现机器人路径规划[J]. 控制与决策 , 2009, 24 (7) : 1043-1049 WANG Xuesong, GAO Yang, CHENG Yuhu, et al. Knowledge-guided genetic algorithm for path planning of robot[J]. Control and decision , 2009, 24 (7) : 1043-1049 |
| [12] | DEFOORT M, FLOQUET T, KOKOSY A, et al. Sliding-mode formation control for cooperative autonomous mobile robots[J]. IEEE transactions on industrial electronics , 2008, 55 (11) : 3944-3953 DOI:10.1109/TIE.2008.2002717 |