



海洋占据地球70%的面积并且蕴含着丰富的生物资源、海洋矿物资源等。因此,对海洋的民用甚至军事上的利用成为各种争夺的焦点。水下航行器作为勘测和开发海洋资源最有效的工具被各国重视。水下航行器以其水下隐蔽航行作战、灵活机动以及极强的水下攻击力而著称,经常被应用在探测、侦查、跟踪甚至水下作战。其航行环境主要包括地理环境和水文环境。其中,地理环境主要指海底地形、障碍物等,构成了水下航行器航行的下边界;水文环境包括海流、潮流、潮汐、内波、跃层、透明度、海水温度、海水密度、盐度、声速等,它们会影响水下航行器的航行安全和隐蔽性。众所周知,安全性是水下航行器执行任务的基础,隐蔽性是对水下航行器执行任务的基本要求。而海洋中影响水下航行器安全性、隐蔽性的要素众多,如果不考虑这些要素,轻则会使水下航行器偏离航线、延长任务执行时间;重则使水下航行器失去控制,造成重大损失[1, 2, 3]。复杂的水文环境要素不仅给水下航行器的航行作战带来机遇也带来了挑战。本文以水下航行器为对象,重点探讨海流、透明度、跃层、内波等水文环境要素对水下航行器航行安全的影响。
文章主要通过分析海流、透明度、跃层和内波等主要海洋环境因素的成因和影响,以便在航路规划的过程中更好地利用海洋环境有利的因素,避开或减少不利的因素。增强水下航行器在复杂海洋环境下的综合能力。
1 水下无人航行器及数学模型本文以典型的流线型水下无人航行器作为研究对象,AUV的主体为回转体。其中,执行机构包含水平舵、方向舵、主推以及辅推等。
因航行器在水中通过海水与舵角的作用力矩进行各种运动,所以复杂的海洋环境对海水与执行机构之间的作用产生复杂的非线性变化。对航行器的安全形势起到很不利的影响。建立船体坐标系及固定坐标系如图 1所示。
 |
| 图 1 船体坐标系及固定坐标系Fig. 1 Body coordinate and fixed coordinate systems |
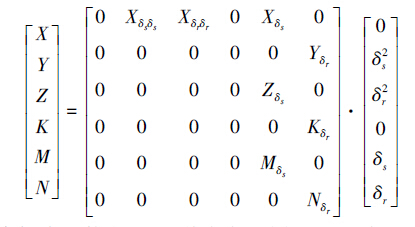
水下航行器的数学简化模型为

为了仿真的需要,建立水下航行器的执行机构的数学模型。
舵对航行器航行运动所产生的力和力矩是很复杂的,通常情况下水下航行器的舵作用力,只考虑舵产生的阻力、力矩和升力。同时忽略他们之间的耦合作用影响。舵的模型可以描述为
推进器的模型可以描述为

海流亦称洋流,是指海洋中海水以相对稳定的速度,沿一定的方向做大规模的非周期性运动。其可以分为风海流、涡流、潮汐流、表层流及深层流等不同形式,其流动方向有水平方向,也有垂直方向。一般海流的大小和方向都是随季节的变化而不同,随温度、盐度的升降而异。海流是水下航行器在水下执行任务过程中最大的影响因素,因为海流的广泛存在并且局部地区的海流不确定性,对航行器的影响非常巨大。从自主控制角度来看,充分利用结合海流的方向、流速、作用在航行器上的力和力矩,将这些因素作为自主规划的约束条件是航行器自主化水平的一个标准。从运动控制角度来看,海流作为扰动项,是必须在运动过程中消除的因素。所以通过对海流的建模实现在控制过程中利用或者抵消海流的干扰是非常重要的智能方法。
海流的数学模型可以简单描述为

目前对海流建模主要以定常流为主。在一个方向以固定流速,海流直接影响水下航行器的水下定位以及航速、航向等机动性能,主要表现在3个方面[4, 5, 6, 7, 8, 9, 10, 11]:
1)影响水下航行器航行的经济性
如果航行器可以通过掌握的海流和潮流的信息和规律,利用海流对航行器本身造成的有利推力,并综合航行器所执行的任务中的路径要求和规划,可以大大节省航行器自身携带的能源的消耗。增大水下航行器的续航力,并且在充分利用海流的情况下,航行器可以借助海流对水下航行器的作用加快航行器的航行速度。如图 2中,5个航行器航行方向与海流夹角中,航行器1是最为经济的,航行器2是为浪费燃料。结合航行器在航路规划过程中各任务对时间和路线的要求不同,选择不同的与海流夹角,这样最大的优化利用海流。
 |
| 图 2 海流环境下航行器航行方向Fig. 2 The heading of underwater vehicles under ocean current |
2)影响水下航行器航行的安全性
水下航行器在海流流速较大的海区航行时,容易使水下航行器失去控制。当航行器与海流之间的夹角接近90°时,即所谓的“横流”,如图 2中航行器3所示,海流对航行器本身造成的偏航力矩最大,这样航行器为了修正航迹而消耗的能源最大,如果航路规划过程中航线出现与海流垂直的通过重新设计航路,以保证航路方向矢量与海流方向矢量保持锐角,同时在任务允许的范围内要尽量避开此海流区域。在航路规划过程中,有效利用航行路线与海流构成有效夹角,以此来实现任务效果与安全性的综合最优是水下无人航行器智能化和自主化的重要指标。
3)影响水下航行器航行的隐蔽性
水下航行器执行隐蔽任务时,例如,通过敌方控制的海峡、反潜封锁区等,为避开敌方声呐设备的搜索和探测,可通过利用深层流进行漂航以此来增加水下航行器的隐蔽性。另外,黑潮流域的海洋背景噪声比一般海域的噪声要高很多,因此处在这种环境中的水下航行器噪声不易被敌方侦查到,从而增强了自身的隐蔽性。
2.2 透明度对水下航行器活动的影响透明度是海水中能见程度的一种量度,表示了光线在海水中透射的深度。不同海域海水透明度的分布是不一样的。大洋中悬浮物较少,海水透明度较大,一般可达40~50 m;与之相反,近海沿线水中悬浮物较多,能见度一般约10~30 m;江河入海口地区水中泥沙含量比较大,海水透明度可能小到1~2 m。此外,相同海区不同时间海水的透明度也会因会海水温度等因素产生透明度变化。在无人航行器航路规划时,根据任务对安全和隐蔽性的要求等级来决定海水透明度在航路规划过程中的影响权重。例如,水下航行器的任务是布雷任务则隐蔽性是非常重要的航性指标,所以在航路规划的过程中,要充分考虑海水透明度的因素,增加自主规划时的考虑权重。因此,为了保证水下航行器的隐蔽性,应根据待规划海区的历史资料,让规划的航路尽量避开水色低、海水透明度高的海区[12]。
2.3 跃层对水下航行器活动的影响
所谓温、盐、密、声速跃层,是指海洋中温度、盐度、密度、声速垂直梯度较大的水层。跃层的主要特性为强度、上界深度和厚度。如图 4所示。假设图为某海洋水文因素跃层的垂直分布曲线上,曲线中的拐点A、B分别为跃层的上界和下界。A点所在垂直深度ZA为跃层的上界深度,B点所在垂直深度ZB为跃层的下界深度,2个深度之差即△Z=ZA-ZB为跃层的厚度。当A、B 2点之间跃层的某要素差值为 丨△X丨 时,则跃层的强度为± 丨△X 丨/△Z。通常情况下,当某跃层的垂直分布自上向下依次递减时,强度取正号,并称之为正常跃层(正跃层);反之取负号,称之为逆跃层。海洋中各主要跃层对水下航行器的影响主要在安全性及隐蔽性上,例如,跃层可能会突然造成浮力的改变或者改变航行器的水声特性。可充分利用跃层对水声特性的干扰增加水下航行器的隐蔽性,同时避免因浮力的改变造成触底或者推出水面。这样在水下航行器航执行以安全性和隐蔽性为目的的任务时,海洋跃层因素作为航路规划时考虑的重要参考因素。
 |
| 图 4 跃层示意图Fig. 4 Sketch of thermal layer |
海洋跃层将影响其附近海域的温度、盐度、密度、声速等性质的循环,在海水的垂直面上,其严重影响温度、盐都、密度、声速等海洋要素的性质的变化规律。这样海洋跃层就使得上下两边的海水各主要要素的性质有很大的不同。研究海水跃层的变化规律,对水下航行器活动、水声探测和水下通信等均有重要意义[12]。
2.3.1 密度跃层对航行器的影响密度跃层的远近对内波载荷的大小有较大的影响,荷载会随着跃层的远近发生变化。离跃层越近所受荷载越大,相反,荷载越小。最大内波荷载与静水压力大小处于同一数量级,所以该影响不得不着重考虑。但是同一深度下内波荷载沿着水下航行器经纬两方向的变化趋势大体相同[14]。
密度跃层对水下航行器活动影响很大。当密度跃层上方海水的密度小而跃层下方的海水密度大时,海水的密度差就会导致海水产生对水下航行器的浮力急剧减小的作用,俗称“海中断崖”。它会使进入此区域中的水下航行器突然因浮力不足而急速下沉,当密度跃层上方海水的密度大而跃层下方海水的密度小时,这时的海水密度差就会与前面相反,产生对水下航行器的浮力突然变大的作用,俗称“液体海底”。这2种因密度跃层造成的现象严重威胁到水下航行器的航行安全。
2.3.2 声速跃层对航行器的影响目前主要的海洋探测都是以声音作为主要媒介。所以声速是一个非常重要的水文环境要素,它同时决定着声的传播路线以及所有其他的声学现象。声速在传播时会向速度更慢一侧发生折射。因海洋海水的自身物理特性的分布情况所决定,可以使声音传播速度造成较大变化的区域叫声速跃层[17]。通常情况下声速跃层是由温度、盐度、压强的不均匀造成的。声速跃层的存在会使以声纳为代表的水声探测设备出现探测盲区而无法工作,对水下航行器之间的通信和对敌探测有非常明显的影响。
在声速跃层的区域里,声速梯度的传播方向在深声道的上下层中是相反的。在深声道的上层,声波的传播将向深声道的方向发生偏移,使得声波无法直接穿越声速跃层,在该区域发射的声纳信号不易探测到跃层之下的目标,也就是说潜入跃层以下的水下航行器被发现的可能性大为减小,增强其隐蔽性。在深声道区域,声波信号的声强较大,可以传播到很远的距离,水声设备在该区域的使用效果较好。因此,航行在深声道中的水下航行器将可以探测到距离很远的目标,增强了探测能力。另一方面,通过利用水声跃层对水声探测信号的影响,水下航行器可以根据自身的不同任务要求利用周边的水文环境增加自身的隐蔽性或者增加自身携带的水声感知设备的探测能力。因为声波在复杂水文环境下发生特殊变化是随着区域变化而有很大不同,所以水下航行器在执行任务时需要结合自身任务的需求,选择路线需要经过的最有利区域。
2.3.3 温度跃层对航行器的影响温度跃层为水温垂直变化较快的水层,可分为2类:1)主温跃层,也成为永久温跃层,该温度跃层常年位于较深的大洋中,且随季节变化较小;2)季节性温跃层,该温度跃层一般位于临近大陆的边缘海,从春季产生加强,到夏季达到最强,秋季又开始减弱,冬季消失[15]。温度跃层影响水声的传播,如图 5和图 6所示,对声呐探测水下目标概率影响很大。所以有利于水下航行器的隐蔽性。熟悉并利用温度跃层可以有效的躲避敌人的探测和侦查。


与水声跃层相似,对水声的正反两面干扰,可以根据水下航行器任务的不同充分利用其特性。温跃层中水声变化的相关参数对水下航行器的隐蔽性、搭载水下武器、航路规划等方面都是至关重要的。
2.4 内波对水下航行器活动的影响内波是一种因海水运动而产生的海洋要素,它是因为海洋内部的海水密度不同,造成不同密度之间的水层之间产生一种自发的波动。内波对声速的影响如图 7所示。内波的存在像海面的波浪一样普遍。只要海水稳定的分成不同的密度层,同时再有扰动源的存在,内波就会随之产生。它导致等密度面的波动,使声速的大小和方向发生改变,内波对声呐设备的影响极大,充分利用内波有利于水下航行器在水下的隐蔽。

1)内波对水下航行器的不利影响
内波是海洋中的一大隐患,对水下航行器航行有着较大的影响。尺度较小的内波会使航行其上的水下航行器产生颠簸,易对航行器壳体及其附属结构造成损失。内波荷载作用在水下航行器表面上的压力是不均匀的,极端场合下,巨大的内波甚至可以把水下航行器托出水面或拽下海底。水下航行器在执行任务时,应尽量避免将规划的航路经过此区域。
2)内波对水下航行器的有利影响
内波中的高频随机内波对水下航行器航行隐蔽性有着一定的帮助。内波使声速的方向和大小都发生脉动,因而影响着声呐设备的探索侦查能力,故有利于水下航行器的隐蔽而使敌方的监听遇到困难。高频随机内波在波动的过程中会产生较大的噪声。因此在该海域活动的水下航行器,其发动机等噪声会因高频随机内波的存在在内波区域内传递时快速衰减,甚至水下航行器自身的噪声可以完全被内波的噪声完全掩盖住,从而增加了水下航行器的隐蔽航行[13]。在水下航行器执行隐蔽侦查任务时,可以通过利用这种内波区域降低了水声侦测被发现的概率,增加了水下航行器的隐蔽性以及安全性。
3 水下航行器对水文要素的利用与躲避在海洋环境下,水文环境要素是水下航行器不可避免的影响因素。而水下航行器在海洋执行任务的过程中,航路的规划需要根据任务的目的不同,在自主制定航路时也要对不同的海洋水文环境因素参考的权重也不同,如表 1所示,近岸巡逻任务是在近海岸的水文环境下进行巡逻任务,重点强调近岸任务,并且无需考虑隐蔽性,安全性是该任务的第一要求,近岸情况下海流比较复杂,所以可以按表中所示的权重分配。又例如港口侦查,该任务以航行器的隐蔽性作为第一需求,所以海水的透明度作为最需要考虑的水文要素。如果任务是海底侦查,则海流的因素影响较小,而内波和跃层则是比较大的影响因素。
| 任务 | 海流 | 透明度 | 跃层 | 内波 | 近岸巡逻 | 4 | 1 | 3 | 2 |
| 海底搜索 | 2 | 1 | 4 | 3 |
| 港口侦查 | 3 | 4 | 2 | 1 |
| 远程调度 | 4 | 3 | 2 | 1 |
因文章考虑因素的原因只列举4项,可根据海洋环境数据扩展该表格。
本文采用启发式搜索算法A*算法,A*算法由已知代价和估计代价共同组成了代价函数。函数形式为

使命任务要求水下航行器能够根据地形的不同情况进行回避,使航行器所受到的海洋威胁度最小,并保证有足够的能量完成全部使命。因此代价函数要考虑威胁、地形障碍等因素,同时还要尽量缩短航程,减少航行时间。实际代价函数表示为

本文以浅海定常海流作为海流对象。在受海洋环境因素影响下的路径规划过程中,以A*算法为自主控制方法。假设水下航行器收到海流,内波,跃层等因素的影响,并且以相应的数学模型进行路径规划及最优化。仿真1是基于海洋环境因素威胁度的自主水下航行器航路规划,如表 1所示,以参考威胁权值为海流为2,透明度为1,跃层为4,内波为3的海底侦查任务为例。其中,增加了海底敌方的侦听设备,在避开这些设备的同时,利用或避免海洋环境因素的干扰,制定安全、最优的航行路径。
如图 8所示,图中等高线分别代表内波,跃层等海洋水文条件的强度,因任务在水下较深地区,仿真中透明度近似恒定值,海流为定常流。航行器在优先避开最大威胁侦测设备的前提下,根据海洋环境因素改变自己的航行路线,避开了强度最大的跃层区域,避免航路过于绕远,浪费能源,采取了从内波值较弱的区域穿过去。
 |
| 图 8 水文环境干扰下自主航路规划Fig. 8 The autonomous sailing rout under the disturbance of ocean environment |
图 9为三维视角下的航路规划图,图中的峰值状物体表示该点的海洋内波与跃层的强度。峰值越高表示强度越大。此图可明显看出,航行器在威胁度权值的参考作用下,首先避开了3个侦测设备的危险区域,并且寻得内波与跃层影响最小路线,在最后的侦测设备附近,因内波与跃层的关系,航行器选择越过此点,避免过于绕远而浪费能源。最终抵达终点。
 |
| 图 9 三维水文环境干扰下自主航路规划Fig. 9 The 3-D autonomous sailing rout under the disturbance of ocean environment |
仿真2是近岸巡逻任务,参考威胁权值为海流为4,透明度为1,跃层为3,内波为2,此次仿真通过采用威胁权值与不采用做一个对比。图 10为未采用威胁权值的航路规划及误差,图中阴影部分为岛屿,轮廓线包围区域为海流,浅黑轮廓线表示海流较小的区域,深黑轮廓线表示海流较大的区域,从图中可以看出,因躲避岛屿,水下航行器选择安全性最高的航线,选择远离岛屿,这样航线就处于海流较强的区域的距离比较长,对航行器的航行精度影响较大。
 |
| 图 10 未采用威胁权值的航路规划及误差Fig. 10 The sailing planning and error without threaten weight |
图 11采用了威胁度权值的航路规划方法。因外侧深蓝色区域的海流较大,威胁权值较高,则航行器的路线更多的选择处于海流较小的区域。同时,因为海流的影响相对较小,从而保证了航线的精确性。
 |
| 图 11 采用威胁权值的航路规划及误差Fig. 11 The sailing planning and error with threaten weight |
海洋环境是水下航行器安全航行以及执行完成任务的重要影响因素,对复杂海洋环境因素的了解可以有效的提高航行器的续航能力,操纵性,甚至是作战能力。除了上文提到的海流,透明度,跃层和内波外,复杂的海洋欢迎还包括海底地理环境,生物因素以及磁场等众多因素。每一个因素都可以成为增强航行器性能的利器,但没有充分考虑到的海洋环境因素也可以是导致航行器任务失败甚至威胁自身安全的隐患。所以在现有海洋科学的研究基础上,水下航行器的设计,制造,任务作业等过程都要充分考虑海洋环境因素的影响。这样可以大大提高航行器的经济性,安全性,操纵性、作战性能以及一些其他的相关性能。
| [1] | 崔茂常,朱海.军事海洋学浅谈[J].海洋科学, 2000, 24(9): 23-25.CUI Maochang, ZHU Hai. A review on navy oceanology[J]. Marine Sciences, 2000, 24(9): 23-25. |
| [2] | 方书甲.海洋环境对海军装备性能的影响分析[J].舰船科学技术, 2004, 26(2): 5-10. FANG Shujia. Analysis of the ocean environment influences on the performance of the navy equipment[J]. Ship Science and Technology, 2004, 26(2): 5-10. |
| [3] | 施建伟. 现代海军作战与环境信息[D].青岛:中国海洋大学, 2005: 25-29.SHI Jianwei. The relationship between navy war and environmental information[D]. Qingdao: Ocean University of China, 2005: 25-29. |
| [4] | 徐玉如, 姚耀中.考虑海流影响的水下机器人全局路径规划研究[J].中国造船, 2008, 49(4): 110-114.XU Yuru, YAO Yaozhong. Research on AUV global path planning considering ocean current[J]. Shipbuilding of China, 2008, 49(4): 110-114. |
| [5] | 毛宇峰, 庞永杰.改进粒子群在水下机器人路径规划中的应用[J].计算机工程, 2010, 30(3): 789-792.MAO Yufeng, PANG Yongjie. Application of improved particle swarm optimization in path planning of underwater vehicles[J]. Journal of Computer Application, 2010, 30(3): 789-792. |
| [6] | 高博,徐德民,张福斌,等.海流建模及其在路径规划中的应用[J].系统仿真学报, 2010, 22(4): 975-961.GAO Bo, XU Demin, ZHANG Fubin, et al. Method of designing optimal smooth way for vehicle[J]. Journal of System Simulation, 2010, 22(4): 975-961. |
| [7] | 王磊.海洋环境下水下机器人快速路径规划研究[D]. 哈尔滨:哈尔滨工程大学, 2007: 19-25.WANG Lei. Research on fast path planning for AUV in ocean environment[D]. Harbin: Harbin Engineering University, 2007: 19-25. |
| [8] | 郁振伟. 潜艇水下航行与海流.全国首届水下导航应用技术研讨会[C]//青岛, 中国, 2001: 145-147.YU Zhenwei. The underwater motion of submarine andcurrent[C]//Conference Proceedings of 1st Applied Technology on Underwater Navigation. Qingdao, China, 2001: 145-147. |
| [9] | 鲁燕. 海流环境中水下机器人实时运动规划方法研究[D].哈尔滨:哈尔滨工程大学, 2006: 30-32.LU Yan. Research on real-time motion planning of AUV under ocean current environment[D]. Harbin: Harbin Engineering University, 2006: 30-32. |
| [10] | 莫军, 朱海,丁宁.GPS与基于海流数据库的推算船位的数据融合[J].中国航海, 2002, 19(5): 25-29.MO Jun, ZHU Hai, DING Ning. Data Fusion between GPS and calculated positions based on ocean database[J]. Navigation of China, 2002, 19(5): 25-29. |
| [11] | 韩志学.海流作用下水下机器人区域探测规划方法[D].哈尔滨:哈尔滨工程大学, 2004: 28-30.HAN Xuezhi. The methods for AUV region reconnaissance under the ocean current[D]. Harbin: Harbin Engineering University, 2004: 28-30. |
| [12] | 中国船舶重工集团公司.海军武器装备与海战场环境概论.海洋出版社.第2篇: 96-98, 123-140. |
| [13] | 方欣华,杜涛.海洋内波基础和中国海内波[M].青岛:中国海洋大学出版社, 2005: 20-23. |
| [14] | 李雅斯. AUV路径规划系统的环境建模方法研究[D].哈尔滨:哈尔滨工程大学, 2011: 23-31.LI Yasi. Research on the environment model method of the AUV path planning system[D]. Harbin: Harbin Engineering University, 2011: 23-31. |
| [15] | 侍茂崇. 物理海洋学[M]. 济南:山东教育出版社, 2004: 49-61, 73-74. |
| [16] | 潘长明,高飞,孙磊. 浅海温跃层对水声传播损失场的影响[J].哈尔滨工程大学学报, 2014, 35(4): 401-407.PAN Changming,GAO Fei, SUN Lei. The effects of shallow water thermocline on water acoustic transmission loss field[J]. Journal of Harbin Engineering University, 2014, 35(4): 401-407. |
| [17] | ETTER P C. 水声建模与仿真[M].蔡志明,等译. 北京:电子工业出版社, 2005: 19-21. |
| [18] | 何贤强,潘德炉,黄二辉,等.中国海透明度卫星遥感监测[J].中国工程科学, 2004, 6(9): 33-37.HE Xianqiang, PAN Delu, HUANG Erhui, et al. Monitor of water transparency in the China sea by using satellite remote sensing[J].Engineering Science, 2004:6(9),33-37 |
| [19] | 沈国光,叶春光.海洋内波对水声场的扰动[J].海洋工程, 2002, 20(2): 78-84.SHEN Guoguang, YE Chunguang. Disturbance of water sound field by ocean internal waves[J].The Ocean Engineering, 2002, 20(2): 78-84. |