

DOI: 10.3969/j.issn.1673-4785.201309038

 ,
,
,
,
2. 哈尔滨工程大学 自动化学院,黑龙江 哈尔滨 150001;
3. 哈尔滨工程大学 机电工程学院,黑龙江 哈尔滨 150001
,
,
2. College of Automation, Harbin Engineering University, Harbin 150001, China ;
3. College of Mechanical and Electrical Engineering, Harbin Engineering University, Harbin 150001, China
碍航物规避一直都是UUV控制领域的热点问题,是UUV顺利完成使命的安全保证。UUV航行时,除了海岛、沉船和暗礁等未知碍航物,不可避免地要受到船舶和漂浮物等移动碍航物的威胁,这对UUV避障的实时性和安全性提出了较高的要求。
人工势场法因其原理简单、结构简洁和生成路径平滑等特点在机器人路径规划中有着广泛的应用[1],但算法本身存在缺陷[2-3]:容易陷入局部极小点,使目标不可达。文献[4]引入势场栅格, 搜索势能累计最小的最优路径,可解决局部极小点问题,但该方法由于规划时间较长,不适用于实时路径规划。文献[5]通过添加2种虚拟力的方法, 用来摆脱“无限大”碍航物与U型碍航物形成的局部最小。文献[6]采用模糊变系数的矢量场法对水下航行器的回收路径进行规划。文献[7]提出一种指数势场函数可解决传统势场函数引力和斥力数值变化过快的问题。文献[8]提出一种基于目标位置的改进斥力势场函数,可有效解决当目标点在碍航物附近时不可达的问题。
为满足动态路径规划需求,文献[9]讨论了规划环境中障碍物运动的情况,在势场模型中加入了障碍物速度因子。文献[10]在建立势场时考虑了避撞的最短允许距离和相对速度等因素。另外,海流作为一种能量的流动对UUV的操控带来较大影响,直接影响航行速度、能量消耗和航行时间。文献[11]将海流作用力引入人工势场,但采用的是恒定海流作用力,不能适应复杂的海洋环境。因而,针对海洋环境中动碍航物和海流复杂的特点,本文提出一种综合目标导引、遭遇时间和海流的改进人工势场,用于设计面向动碍航物的规避方法。
1 传统人工势场人工势场法的思想将目标点描述为产生引力势场,并且在目标点处引力势能最小,碍航物产生斥力势场。UUV处于引力势场和斥力势场叠加的复合势场中,由势场产生的合力决定着UUV的运动,运动到势能最小点,即目标点[12],总的势场函数可以定义为
 |
(1) |
式中:q为UUV在固定坐标系E-ξη上的位置,Uatt为目标点产生的引力势场函数,Urep为碍航物产生的斥力势场函数, U为合成势场函数。由于本文只研究UUV水平面的避碰问题,因此接下来仅对二维空间中的势场进行介绍。
1)引力势场。
势场中每一点的负梯度方向均指向目标点,即每一点处的引力方向均指向目标点。许多学者提出了不同的引力势场函数,但是最常见的引力势场函数为[8]
 |
式中:ξa为引力因子;ρ(q, qgoal)为UUV与目标点的距离;m为正数,当m=1时,引力势场为圆锥形,当m=2时,引力势场为抛物面形, 本文取m=2。引力势场的负梯度为
 |
引力方向指向目标点,并且目标点处引力为零。
2)斥力势场。
碍航物所产生的斥力势场通常被描述为[12]:
 |
(2) |
式中:ηr为斥力因子;ρ(q, qobs为UUV与碍航物之间距离的最小值,qobs为离UUV距离最近的碍航物上的点;ρ0为斥力势场的作用区域范围。斥力为斥力势场的负梯度,可表示为
 |
3)全局合成势场。
当存在N个碍航物时,第i个碍航物产生的斥力势场为Urepi(q),则总势场Utotal(q)可表示为
 |
当碍航物为圆形,中心点坐标为(9 m, 13 m),半径为2 m,作用范围ρ0=4 m,斥力因子ηr=1,目标点为(4 m, 8 m),引力因子ξa=0.1时,全局势场势能三维分布和等高线分布如图 1所示。

|
| 图 1 势场函数的势能分布 Fig. 1 Potential distribution of potential function |
全局合成势场中合力为
 |
UUV将受合力的作用运动到势能最小点,即目标点。
2 基于改进人工势场的环境模型UUV在未知海洋环境中航行时会遇到各种碍航物,根据碍航物的运动特性可以分为静态碍航物和动态碍航物,其中动态碍航物的运动比较复杂。考虑到航路规划的时效性要求,应该对碍航物的信息尽量简化处理,为此考虑采用碍航物轮廓的外包圆来代替碍航物。
考虑到在传感器探测过程中存在一定的测量误差和其他安全因素,因此采用在碍航物外包圆外增加一定的安全阈值ε来提高安全性。外包圆的具体取法为:将碍航物所有的顶点均连接起来构成多边形,直径取此多边形的顶点连线距离的最大值,圆心取此连线的中点。如果几个碍航物相邻很近,就把几个碍航物当作是一个整体来处理。
2.1 考虑目标导引因素的斥力势场采用式(2)的传统斥力势场,当目标点在碍航物附近时,UUV无法到达目标点。考虑UUV与目标点的相对距离,采用文献[7]中的改进势场:
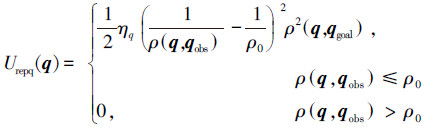 |
(3) |
式中:ηq为位置斥力因子。例如当碍航物为圆形,中心坐标(8 m, 8 m),半径2 m,作用范围ρ0=3 m,ηq=1,目标点为(10 m, 4 m)时,按式(3)生成的斥力势场的势能三维分布如图 2所示,越靠近目标,斥力势能越小,这可解决当目标与碍航物距离较近时出现的局部极小问题。

|
| 图 2 改进斥力势场函数的三维势能分布 Fig. 2 Potential distribution of improved repulsive potential function in 3D environment |
在利用势场法对UUV进行航路规划时,由于运动碍航物的影响,不仅要考虑UUV与运动碍航物的位置因素,还需要考虑UUV与碍航物的遭遇时间因素,为此在斥力势场中应考虑遭遇时间因素,UUV和碍航物的速度分别为vr和vobs,遭遇时间产生的斥力势场为
 |
(4) |
式中:ηt为时间斥力因子;ero为从碍航物指向UUV的单位向量;vro=(vr-vobs)Tero为UUV与碍航物连线方向上的相对速度,若vro≤0,则表示UUV在远离碍航物方向运动,若vro≥0,则表示UUV在朝向碍航物方向运动。
因此由遭遇时间和目标导引产生的总斥力函数Urep为
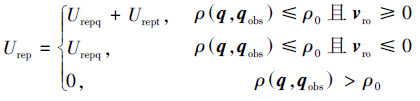 |
则UUV所受排斥力Frep可表示为
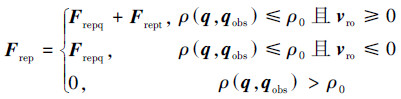 |
(5) |
式中:Frepq和Frept分别表示目标导引和遭遇时间因素对UUV产生的斥力,由斥力势场函数(3)和(4)可得
 |
(6) |
式中:▽q和▽v表示斥力势能Urep分别对参数q和速度v求梯度。
2.3 海流影响UUV在海洋环境中航行时,不可避免地要受到海流的影响。在海洋环境中,大部分海流都是水平方向上的,因此通常只考虑水平方向上的海流对UUV运动的影响,并且海流的流速在一定时间和区域内是恒定不变的,本文分别采用定常流和涡流来分析。将涡流的速度V c分解到ξ轴和η轴上的速度分别为uc和vc,如式(7)所示:
 |
(7) |
式中:k1和k2为涡流系数,(η0, ξ0)为涡流中心位置坐标,r是位置(η, ξ)与涡流中心的距离。
由于海流对UUV产生作用力的作用点一般不与质心重合,这会对UUV产生一个转艏力矩作用,因此UUV在航行时就必须要克服海流的作用力和其产生的转艏力矩,增加了能量消耗[11]。
因此在利用人工势场法进行航路规划时,需考虑海流对航路的影响,本文考虑在势场中海流对UUV产生的作用力与流速成正比,即作用力为Fc=μVc, 方向与流速方向相同。
3 算法流程从上述内容可知,在改进的人工势场中UUV的受力包括引力、斥力和海流作用力。UUV在势场中所受的斥力分析如图 3所示,在固定坐标系E-ξη下,目标点为qgoal=[ηg ξg]T,UUV位置为q=[ηr ξr]T,目标点和UUV连线与ξ轴方向的夹角

|
| 图 3 势场中斥力分析 Fig. 3 Repulsive force analysis in the potential field |
由式(6)可知,Oi产生的斥力Frepqi在UUV与碍航物连线方向和UUV与目标连线方向的分量分别为Frepq1i、Frepq2i。Frepq1i在ξ轴和η轴上的分力分别为Frepq1,ξi=|Frepq1i|·cos βi, Frepq1,ηi=|Frepq1i|·sin βi。Frepq2i在ξ轴和η轴上的分力分别为Frepq2,ξi=|Frepq2i|·cos α, Frepq2,ηi=|Frepq2i|·sin α。
由遭遇时间产生的斥力Frepti在ξ轴和η轴方向上的分力分别为Frept, ξi=|Frepti|·cos βi, Frept, ηi=|Frepti|·sin βi。
所受总力的受力分析见图 4,海流对UUV的作用力Fc与ξ轴方向的夹角为γ,则Fc在ξ轴和η轴方向上的分力分别为Fcξ=|Fc|·cos γ,Fcη=|Fc|·sin γ。Fatt在ξ轴和η轴上的分力分别为Fatt,ξ=|Fatt|·cos α, Fatt,η=|Fatt|·sin α。

|
| 图 4 改进人工势场中总受力分析 Fig. 4 Total force analysis in improved potential field |
UUV运动方向与ξ轴的夹角为航向角H,在N个碍航物的共同作用下,H可按式(8)求解。
 |
(8) |
按式(5)求合力F,UUV在F的作用下运动,每航行一定距离后,计算一次航向,并调整运动方向,直至到达目标位置。
综上,动态避障算法具体步骤如下:
1)参数初始化:初始化引力势场因子、斥力势场因子、UUV航速v、起始位置、目标位置和UUV的航行时间步长δt;
2)建立海流环境模型和人工势场;
3)对UUV在势场中的受力情况进行分析,根据式(8)计算出UUV的航向角H;
4)根据计算出的航向角H和UUV的航速,计算出UUV下一步的位置,即
 |
5)判断UUV是否到达目标位置,若到达,则算法结束,输出最终得到的航路,否则返回步骤3),继续执行。
4 仿真验证为验证动态避障算法的可行性,分别在定常流和涡流环境下进行了避障仿真实验。
静态碍航物环境信息如表 1所示,动态碍航物信息如表 2所示,运动方向为与ξ轴的正向夹角,规定顺时针方向为正。引力系数ξa=0.1,斥力系数位置因素ηq=3,遭遇时间因素ηt=5,海流影响系数μ=3。
| m | ||
| 碍航物标号 | 中心坐标 | 碍航物半径 |
| A | (35, 140) | 5 |
| B | (40, 50) | 5 |
| C | (80, 90) | 10 |
| D | (120, 30) | 10 |
| 碍航物 标号 | 初始中心 坐标/m | 半径/m | 速度/kn | 运动方向/(°) |
| E | (170, 80) | 5 | 2.2 | -45 |
1)定常流环境下局部航路规划仿真验证。
选取平行于η轴的定常海流进行仿真实验,流速为2 kn,起点Start为(16 m, 11 m),终点End为(180 m, 188 m),UUV航速为v=4 kn,设碍航物产生的斥力作用范围为距碍航物边界20 m范围内。仿真结果如图 5所示,黑实线航路是本文所提方法规划的航路,能有效地避开动态碍航物和静态碍航物,规划出安全无障的航路到达目标点。浅虚线航路是未将海流作用力添加到势场下的规划航路。通过比较两航路,可发现在海流作用下,航路会发生较大偏移,海流对航路规划的影响比较明显,而新算法充分考虑到了海流对UUV运动的影响,使得UUV对环境的适应性大大增强。另外,单步规划时间约10 ms, 证明算法是快速可行的。

|
| 图 5 定常流环境下避障结果 Fig. 5 The avoidance results in the constant sea-flow |
2)涡流环境下局部航路规划仿真验证。
选取涡流环境进行仿真实验,式(7)中涡流的参数设为:中心坐标为(25 m, 130 m),k1=-1.6,k2=1.6。起点、终点和UUV的航速与试验1)相同。首先利用涡流流场模型对海流环境建模,仿真实验结果如图 6所示,仿真结果表明,算法在涡流场环境下,能有效地避开动态碍航物和静态碍航物,可适应复杂的海流环境。

|
| 图 6 涡流环境下避障结果 Fig. 6 The avoidance results in the vortex sea-flow |
对UUV动态避障问题进行了研究,设计了基于一种改进人工势场法的动态避障算法。改进势场综合考虑了目标因素、UUV与移动碍航物遭遇时间以及海流的影响。最后分别在定常流和涡流环境下对算法进行了仿真验证,仿真结果表明UUV能安全避障,由于该方法考虑了变化海流的影响,因此可提高对海洋环境的适应性。此外本方法只是进行了仿真验证,有必要在真实环境下做进一步验证。
| [1] | 张殿富, 刘福. 基于人工势场法的路径规划方法研究及展望[J]. 计算机工程与科学 , 2013, 35 (6) : 88-95 ZHANG Dianfu, LIU Fu. Research and development trend of path planning based on artificial potential field method[J]. Computer Engineering & Science , 2013, 35 (6) : 88-95 |
| [2] | KOREN Y, BORENSTEIN J. Potential field methods and their inherent limitations for mobile robot navigation[C]//Proceedings of the IEEE International Conference on Robotics and Automation. Sacramento, USA, 1991: 1398-1404. |
| [3] | YAN Yongjie, ZHANG Yan. Collision avoidance planning in multi-robot based on improved artificial potential field and rules[C]//2008 IEEE International Conference on Robotics and Biomimetics. Bangkok, Thailand, 2009: 1026-1031. |
| [4] | 王芳, 万磊, 徐玉如, 等. 基于改进人工势场的水下机器人路径规划[J]. 华中科技大学学报:自然科学版 , 2011, 39 (S2) : 184-187 WANG Fang, WAN Lei, XU Yuru, et al. Path planning based on improved artificial potential field for autonomous underwater vehicles[J]. Journal of Huazhong University of Science & Technology: Natural Science Edition , 2011, 39 (S2) : 184-187 |
| [5] | 焦鹏, 王宏健, 丁福光. 基于虚拟势场理论的AUV局部路径规划方法[J]. 中国造船 , 2007, 48 (1) : 76-81 JIAO Peng, WANG Hongjian, DING Fuguang. Local path planning method for autonomous underwater vehicle based on virtual field force[J]. Shipbuilding of China , 2007, 48 (1) : 76-81 |
| [6] | 薛源, 严卫生, 高剑, 等. 基于人工矢量场的AUV自主回收路径规划[J]. 鱼雷技术 , 2011, 19 (2) : 104-108 XUE Yuan, YAN Weisheng, GAO Jian, et al. A path planning method based on artificial vector field for autonomous recovery of AUV[J]. Torpedo Technology , 2011, 19 (2) : 104-108 |
| [7] | 李欣, 朱大奇. 基于人工势场法的自治水下机器人路径规划[J]. 上海海事大学学报 , 2010, 31 (2) : 35-39 LI Xin, ZHU Daqi. Path planning for autonomous underwa-ter vehicle based on artificial potential field method[J]. Journal of Shanghai Maritime University , 2010, 31 (2) : 35-39 |
| [8] | GE S S, CUI Y J. New potential functions for mobile robot path planning[J]. IEEE Transactions on Robotics and Automation , 2000, 16 (5) : 615-620 DOI:10.1109/70.880813 |
| [9] | KON Y, LEE B H. Avoidability measure in moving obstacle avoidance problem and its use for robot motion planning[C]//IEEE/RSJ International Conference on Intelligent Robots and System. Osaka, Japan, 1996: 1296-1303. |
| [10] | GE S S, CUI Y J. Dynamic motion planning for mobile robots using potential field method[J]. Autonomous Robots , 2002, 13 (3) : 207-222 DOI:10.1023/A:1020564024509 |
| [11] | 曹璟.复杂环境下AUV路径规划方法研究[D].青岛:中国海洋大学, 2011: 19-22. CAO Jing. Research on the AUV path planning method in complex environment[D]. Qingdao: Ocean University of China, 2011: 19-22. http://cdmd.cnki.com.cn/article/cdmd-10423-1011229640.htm |
| [12] | LATOMBE J. Robot motion planning[M]. Norwell, USA: Kluwer, 1991 . |