



2. 陕西省油气井测控技术重点实验室
2. Shaanxi Provincial Key Lab of Oil and Gas Well Measurement and Control Technology
0 引言
随着钻井技术的发展,石油钻探技术在深井、超深井开发中的应用日渐成熟,但是仍面临着很多难题。在钻进过程中,随着钻井深度越来越深,井下结构越来越复杂并且钻进难度越来越大,井下钻井工具的振动也会越来越剧烈[1]。钻柱振动在钻井过程中是常见的一种现象,如果不加以抑制,将会对钻具造成严重破坏,并会导致钻井周期延长,也会危及工作人员的安全[2]。研究表明,在井下钻柱和钻头与井壁、岩石之间的摩擦与碰撞会导致钻柱轴向、横向和扭转振动,黏滑振动就属于扭转振动,并且是影响钻柱最为严重的一种振动,对钻柱的损害也最严重[3-4]。
钻柱黏滑振动的研究已经进行了40余年,国内外研究人员也得到了很多研究成果,主要有以下几个方面:①建立黏滑振动动力学模型。通过分析钻井参数、钻柱长度、钻头和岩石相互作用特性对黏滑振动的影响,对黏滑振动的机理和抑制进行分析和研究。F.ABDULGALIL和纪珍从等[5-6]设计了钻柱黏滑振动动力学模型,发现了钻压和扭矩对钻柱黏滑振动的影响。②通过理论与实际结合的方法,将钻井现场数据与模拟试验结合来分析黏滑振动现象的成因,并根据黏滑振动成因研究抑制方法。T.RICHARD等[7]通过建立模型,并结合室内试验分析,研究了钻头与岩石的摩擦因数、转速等参数对钻柱黏滑振动的影响。R.VIGUIE等[8]采用相平面法分析了黏滑振动频率、转速和黏滞系数对钻柱黏滑振动的影响。③通过建立钻柱黏滑振动仿真模型,利用仿真软件模拟黏滑振动,加入控制策略,对黏滑振动的规律进行分析和试验,并验证抑制黏滑振动方法的可行性。E.M.NAVARRO-LÓPEZ等[9]建立了4自由度集中参数模型,采用滑模控制方法实现了对钻柱黏滑振动的抑制。张奇志等[10]利用线性二次型控制方法设计状态反馈控制器来抑制钻柱黏滑振动。
本文根据黏滑振动的振动机理,建立了4自由度扭转模型,通过仿真模拟黏滑振动现象,首先分析了钻井参数对黏滑振动的影响,然后设计了分数阶PID控制器,并首次应用到钻柱黏滑振动的抑制方向。由仿真结果可得,分数阶PID控制器对黏滑振动的抑制效果明显优于传统PID控制器,它能够快速稳定系统,缩短调节时间,有效抑制钻柱黏滑振动。研究结果对抑制钻柱黏滑振动的研究具有参考意义,对降低钻井工具损害、提高钻井效率以及增强作业安全性有重要的指导意义。
1 模型建立钻柱系统主要由井架、天车、游车、大钩、方钻杆、绞车、转盘、钻杆、钻铤和钻头组成。工作时,驱动系统驱动转盘,通过方钻杆带动井中钻柱,从而带动井下钻头旋转。本文中的模型将钻柱系统简化为4个部分:转盘、钻杆、BHA和钻头。各部分通过具有扭转刚度和扭转阻尼的线性弹簧连接。钻柱系统简化模型如图 1所示。

|
| 图 1 钻柱系统简化模型 Fig.1 Simplified model of drill string system |
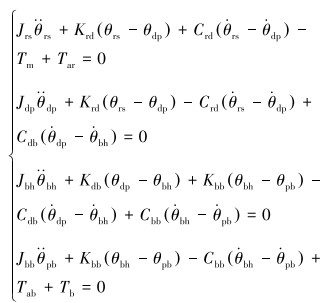
由钻柱系统简化模型可得系统的运动微分方程:
|
(1) |
式中:Tm、Tar、Tab、Tb分别为转盘的驱动扭矩、顶部旋转系统的黏性阻尼力矩、钻头上的黏性阻尼力矩、钻头上的摩擦扭矩,N·m;Jrs、Jdp、Jbh、Jbb分别为转盘、钻杆、BHA和钻头的转动惯量,kg·m2;Krd、Kdb、Kbb分别为转盘与钻杆、钻杆与BHA、BHA与钻头之间的弹簧扭转刚度,(N·m)/rad;Crd、Cdb、Cbb分别为转盘与钻杆、钻杆与BHA、BHA与钻头之间的弹簧扭转阻尼,(N·m·s)/rad;θrs、θdp、θbh、θpb分别为转盘、钻杆、BHA和钻头的角位移,rad;




|
(2) |
式中:Tr为施加在钻头上的扭矩,N·m;Tr=

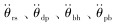
令Tm=u;并令x1= 



|
(3) |
为了抑制钻柱黏滑振动,设计了分数阶PID控制器。分数阶PID控制器即在整数阶PID控制器的基础上加入了积分阶次和微分阶次[11]。分数阶PID控制器的传递函数为:

|
(4) |
式中:KP为比例增益系数,KI为积分时间,λ为积分阶次,KD为微分时间,μ为微分阶次。
当λ和μ都为0时,控制器变为比例控制器;λ为1、μ为0,则变为积分控制器;λ为0、μ为1,则变为微分控制器;λ、μ都为1时,变为整数阶PID控制器;虽然分数阶PID控制器比整数阶PID控制器多了积分参数λ和微分参数μ,但是它包括了整数阶PID控制器,控制器范围更加广泛,控制方式也更加灵活。图 2为分数阶PID控制器结构框图。图 2中:r为系统输入,y为系统输出,e为误差,u为控制器输出,G(s)为被控对象。

|
| 图 2 分数阶PID控制器结构框图 Fig.2 Block diagram of the fractional order PID controller |
2.1 分数阶微积分的定义
Caputo分数阶微分定义为:

|
(5) |
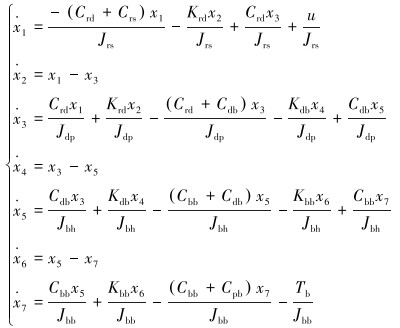
其Laplace变换为:

|
(6) |
根据式(6),Caputo分数阶积分定义为:

|
(7) |
其Laplace变换为:
|
(8) |
式中:α为初值,且α=m+γ,m为整数,积分限为(0,t),Γ(·)为Gamma函数,0 < γ≤1,n、k为微分阶次。
2.2 分数阶微积分滤波器近似 2.2.1 Oustaloup递推滤波器文献[12]分析了各种连续的滤波器逼近效果,其中Oustaloup递推滤波器的逼近效果最为理想,因此采用Oustaloup递推滤波器[13]。假设需要逼近的频段为(ω1, ω2),则滤波器形式可以写为:
|
(9) |
式(9)中零极点和增益如下:
|
(10) |
式中:ω′k为零点,ωk为极点,k为正整数,K为增益,N为近似化次数,2N+1为滤波器的阶次,(ω1, ω2)为拟合频段,Gf(s)为设计出的滤波器模型。
2.2.2 改进的Oustaloup递推滤波器在拟合频段内,分数阶微分算子sβ可以由分数阶传递函数近似为:

|
(11) |
式中:β为微分阶次,0 < β < 1,s=jω,b、d为大于零的常数,一般取值为10和9。
在频段(ω1, ω2)内,由Taylor幂级数展开并截断到第一项,则可得分数阶微分算子的改进滤波器:

|
(12) |
式(12)中零极点可以写为:
|
(13) |
图 3为改进的Oustaloup滤波器和传统Oustaloup滤波器对0.2阶微分环节的近似比较图。

|
| 图 3 两种滤波器对s0.2近似效果比较 Fig.3 Comparison of the approximate effect of two filters on s0.2 |
由图 3可得,改进的Oustaloup滤波器在感兴趣频段内的拟合效果明显优于传统Oustaloup滤波器,并且改进的滤波器在端点处的拟合效果更佳,与原始曲线非常接近,因此使用改进的Oustaloup滤波器近似法。笔者将改进的滤波器封装为分数阶微分算子模块,再按照如图 2所示的分数阶PID控制器结构框图搭建仿真模型,这样分数阶PID控制器就设计完成。
3 仿真结果为了验证分数阶PID控制器对钻柱黏滑振动抑制的效果,进行了仿真试验。试验首先分析了钻井参数改变对黏滑振动的抑制效果,再对两种控制器的控制效果进行了对比分析。本文中所使用的参数有:Jrs=930 kg·m2,Jdp=2 782 kg·m2,Jbh=750 kg·m2,Jbb=472 kg·m2,Krd=698 (N·m)/rad,Kdb=1 080 (N·m)/rad,Kbb=907 (N·m)/rad,Crd=140 (N·m)/rad,Cdb=190 (N·m·s)/rad,Cbb=181 (N·m·s)/rad,Crs=425 (N·m·s)/rad,Cpb=50 (N·m·s)/rad,Wb=97 347 N,μcb=0.5,ξ=10-6,μsb=0.8,γb=0.9,Rb=0.15 m,给定转速v=12 rad/s。
对式(3)的仿真结果如图 4所示。由图 4a可以看出,钻柱处于明显的黏滑振动状态,转盘、钻杆、BHA及钻头各部分角速度都在周期性变化。图 4b中角位移从0开始增加,当系统处于黏滞状态时,角位移不变,处于滑动状态时,角位移增加。钻头处的黏滑振动最严重,黏滞状态与滑动状态也非常明显。由此也可证明本文的模型可以模拟钻井系统的黏滑振动现象。为了抑制黏滑振动现象,首先分析钻井参数的改变是否对黏滑振动有抑制作用。图 5表示当钻压Wb保持不变,改变Tm时钻头角速度随时间的变化曲线。由图 5可知:保持钻压Wb不变,将Tm由10.0 kN·m减小到9.5 kN·m时,驱动扭矩不足以带动钻头旋转,钻头处于黏着状态;当Tm增加到10.5和11.2 kN·m时,钻头旋转并趋于稳定。由此可得,增加系统的驱动扭矩可以抑制钻头的黏滑振动,但是增加驱动扭矩会增加钻机负载并使钻机寿命缩短。

|
| 图 4 钻柱系统各部分角速度和角位移曲线 Fig.4 Angular velocity and angular displacement of each part of the drill string system |

|
| 图 5 Tm对钻头角速度的影响曲线 Fig.5 Effect of Tm on bit angular velocity |
图 6表示当驱动扭矩Tm保持不变,改变钻压时钻头的角速度随时间的变化曲线。由图 6可知:保持Tm不变,将Wb由97.4 kN增加到107.2 kN时,钻头处于黏着状态;当Wb降低至90.5 kN和85.5 kN时,钻头能够旋转并趋于稳定状态,但是降低钻压会降低钻机的切削深度和钻井效率。

|
| 图 6 Wb对钻头角速度的影响曲线 Fig.6 Effect of Wb on bit angular velocity |
虽然适当减小钻压和增大驱动扭矩能够抑制系统的黏滑振动,但是对钻井效率和钻机的寿命有影响,在实际钻井时应用性不大。因此,需要在钻柱系统中加入控制器来抑制黏滑振动现象的产生。本文对传统PID控制器和分数阶PID控制器对钻柱黏滑振动现象的抑制作用进行了分析比较。给定转盘转速12 rad/s, 控制器参数K1=5、K2=0.5、K3=3、λ=0.9、μ=0.3,仿真结果如图 7所示。

|
| 图 7 相同转速下PID控制器与FOPID控制器对钻柱黏滑振动的抑制作用 Fig.7 Suppression effect of PID controller and FOPID controller on stick-slip vibration of drill string at the same RPM |
图 7a、图 7c、图 7e和图 7g中转盘、钻杆、BHA、钻头的角速度除初始状态外都不是0,可以验证分数阶PID控制器和传统PID控制器都可以抑制钻柱黏滑振动,转盘、钻杆、BHA和钻头的角速度最终都可以稳定到12 rad/s;但分数阶PID控制器的超调更小,震荡次数更少,调节时间更短,达到稳定的时间也更短,90 s后已基本达到稳定;图 7b、图 7d、图 7f和图 7h中转盘、钻杆、BHA和钻头的角位移也都在平稳地增加,只有初始时刻传统PID控制器会有一定程度的波动,但50 s后波动几乎消失,角位移曲线斜率不再变化。
为了测试分数阶PID控制器对于系统参数的敏感性,在系统稳定后,对钻压进行突变,测试分数阶PID控制器能否对参数变化引起的系统不稳定做出调控。图 8a和图 8b分别是在150 s处将钻压从97.4 kN降低为85.0 kN和增大到110.0 kN时钻头角速度的变化曲线。从图 8可以得出,在系统运行至150 s时,对钻压进行突变,此时钻头角速度都会波动一会儿,但是波动不大,在随后的100 s左右角速度会再次稳定,证明了分数阶PID控制器对于系统参数的变化有调控能力。

|
| 图 8 钻压变化时控制器对钻头角速度的控制效果 Fig.8 Control effect of the controller on the angular velocity of the drill bit when the weight on bit is changed |
4 结论
(1) 为了抑制黏滑振动,研究者多采用低维钻柱模型,对实际钻柱的分析不够全面。本文采用4自由度扭摆模型,对转盘、钻杆、BHA和钻头的分析更加合理和全面。
(2) 降低钻压和提高驱动扭矩虽然可以抑制黏滑振动,但操作的可行性较低。采用分数阶PID控制器和传统PID控制器都可以在不影响钻井工具寿命和钻井效率的前提下抑制黏滑振动。
(3) 虽然分数阶PID控制器比传统PID控制器多了两个可调参数,但是对系统的黏滑振动抑制更快,达到稳定的时间更短。分数阶PID控制器对系统参数的突变也有调控能力,可使系统在短时间内再次稳定。
| [1] |
张晓东, 朱晓凤, 何石, 等. 钻柱系统粘滑振动稳定性分析及减振方法探讨[J]. 钻采工艺, 2015, 38(2): 89-90. ZHANG X D, ZHU X F, HE S, et al. Stability analysis of stick-slip vibration and discussion of vibration reduction method of drill string system[J]. Drilling & Production Technology, 2015, 38(2): 89-90. |
| [2] |
陈冲, 张仕民, 彭鹤, 等. 基于支持向量机的钻柱黏滑振动等级评估方法[J]. 石油机械, 2019, 47(1): 20-26. CHEN C, ZHANG S M, PENG H, et al. Research on stick-slip vibration level estimation of drillstring based on SVM[J]. China Petroleum Machinery, 2019, 47(1): 20-26. |
| [3] |
牟海维, 王瑛, 韩春杰. 钻柱的粘滑振动规律分析[J]. 石油机械, 2011, 39(3): 67-69. MOU H W, WANG Y, HAN C J. Analysis of stick-slip vibration rule of drill string[J]. China Petroleum Machinery, 2011, 39(3): 67-69. |
| [4] |
吕苗荣, 沈诗刚. 钻柱黏滑振动动力学研究[J]. 西南石油大学学报(自然科学版), 2014, 36(6): 150-159. LÜ M R, SHEN S G. The simulation and analysis of drillstring stick-slip vibration[J]. Journal of Southwest Petroleum University (Natural Science Edition), 2014, 36(6): 150-159. |
| [5] |
ABDULGALIL F, SIGUERDIDJANE H. Backstepping design for controlling rotary drilling system[C]. Proceedings of the 2005 IEEE Conference on Control Applications Toronto, Canada, August, 2005.
|
| [6] |
纪珍从, 程凤霞. 基于HT-60型钻机钻进参数实时监测系统的设计[J]. 机械与电子, 2008(5): 52-54. JI Z C, CHENG F X. Design of real-time detecting system for drilling parameters based on HT-60 rig[J]. Machinery and Electronics, 2008(5): 52-54. |
| [7] |
RICHARD T, DETOURNAY E. Stick-slip vibrations of PDC bits[C]//4th North American Rock Mechanics Symposium.[S.l.]: American Rock Mechanics Association, 2000: 33-40.
|
| [8] |
VIGUIE R, KERSCHEN G, GOLINVAL J C, et al. Using passive nonlinear targeted energy transfer to stabilize drill-string systems[J]. Mechanical Systems and Signal Processing, 2009, 23(1): 148-169. |
| [9] |
NAVARRO-LÓPEZ E M, CORTÉS D. Sliding-mode control of a multi-DOF oil well drill string with stick-slip oscillations[C]//American Control Conference, 2007. ACC 07.[S.l.]: IEEE, 2007: 3837-3842.
|
| [10] |
张奇志, 吴永强. 抑制钻柱黏滑振动和钻头反弹的建模与控制[J]. 石油钻采工艺, 2018, 40(5): 553-558, 595. ZHANG Q Z, WU Y Q. Modeling and control of restraining stick slip vibration of drill strings and bounce of drill bits[J]. Oil Drilling & Production Technology, 2018, 40(5): 553-558, 595. |
| [11] |
牛江川, 申永军, 杨绍普, 等. 分数阶PID控制对单自由度线性振子的影响[J]. 振动与冲击, 2016, 35(24): 88-95. NIU J C, SHEN Y J, YANG S P, et al. Effect of a fractional-order PID controller on the dynamical response of a linear single degree-of-freedom oscillator[J]. Vibration and Impact, 2016, 35(24): 88-95. |
| [12] |
OUSTALOUP A, LEVRON F, MATHIEU B, et al. Frequency-band complex noninteger differentiator:characterization and synthesis[J]. IEEE Transactions on Circuit and Systems-Ⅰ:Fundamental Theory and Applications, 2000, 47(1): 25-39. |
| [13] |
苗涛, 李俊, 刘小宁, 等. 并联型有源电力滤波器的分数阶微积分控制策略[J]. 工矿自动化, 2013, 39(11): 80-84. MIAO T, LI J, LIU X N, et al. Control strategy of fractional order calculus for shunt active power filter[J]. Industrial and Mining Automation, 2013, 39(11): 80-84. |