



2. 川庆钻探工程公司钻采工程技术研究院
2. Drilling and Production Engineering Technology Research Institute, CNPC Chuanqing Drilling Engineering Company Limited
0 引言
页岩气储层的特点是渗透率低,初期产量高,递减快,开采难度大,单井产能较低,后期稳产时间长。国外针对页岩气藏一般采用“长水平段加大规模分段压裂”和“井工厂”钻井作业的开发模式,以达到降低综合成本,提高单井产量的目的[1-3]。在页岩气“井工厂”钻井中,由于同一个水平井组井口间距较近,且每口井的造斜点深度较深,如果轨迹设计不合理或钻井过程中没有考虑邻井空间位置,都有可能导致邻井相碰事故。因此,轨迹防碰技术在“井工厂”钻井中具有举足轻重的作用,需要充分考虑邻井情况,进行防碰分析计算。
1 井眼间距扫描计算方法及井眼轨迹误差分析在井眼轨迹防碰技术中,为了避免井眼之间的空间位置重合,即井眼相碰,需要准确计算参考井上任一点与邻井之间的距离。常用的井眼距离扫描计算方法主要有:最短距离扫描法、水平面距离扫描法和法面距离扫描法[4],在计算井间距时需要2口井的测斜数据,选取其中一口为参考井,另外一口为比较井,如图1所示。井眼轨迹的误差主要来自测量误差和计算轨迹的数学模型误差,但以仪器的测量误差为主。随着水平井测量技术的发展,已在原有的有线随钻测量仪器的基础上研发出无线随钻测量工具MWD。MWD的测量误差源主要包括传感器误差、钻具磁干扰误差、测量仪器不对正误差、磁场异常误差和测量深度误差等,如表1所示。 表中R为随机误差,S为系统误差,G为全局误差。最早对轨迹误差进行研究的是C.J.M.WOLFF和J.P.DE WARDT[5],他们提出的WdW误差扩散模型已经成为现在该领域内的行业标准。但该模型忽略了随机误差,不适用于三维井眼轨迹,现代的测量仪器不能用陀螺权函数来描述,且井斜角误差的权函数不适用于弯螺杆。同时,模型没有采用三维数据可视化技术来描述井眼位置的不确定性,井眼相碰可能性分析不够直观。因此,笔者利用一种全面描述轨迹空间位置不确定性的新方法,建立了基于MWD测量误差的丛式井误差分析模型。

|
| 图 1 邻井距离计算方法示意图 Fig.1 The computing method of distance between offset wells |
| 误差源 | 包含项 | 权函数 | 误差类型 | 偏差值 |
| 传感器误差 | 重力计偏差/g | ABX,Y,Z | S | 0.000 4 |
| 重力刻度系数误差 | ASX,Y,Z | S | 0.000 5 | |
| 磁力计偏差/nT | MBX,Y,Z | S | 70 | |
| 磁力计刻度系数误差 | MSX,Y,Z | S | 0.000 16 | |
| 钻具磁干扰误差 | 磁方位角误差/(°) | AZ | S | 0.25 |
| 轴向磁干扰误差/(°) | AMID | S | 0.60 | |
| 仪器不对正误差 | BHA下垂误差/(°) | SAG | S | 0.20 |
| X轴不对正误差/(°) | MX | S | 0.06 | |
| Y轴不对正误差 | MY | S | 0.06 | |
| 磁场异常误差 | 磁偏角(常数)误差/(°) | AZ | G | 0.36 |
| 磁偏角(水平磁场强度)误差/nT | DBH | G | 5 000 | |
| 磁倾角误差/(°) | MDI | G | 0.20 | |
| 总磁场强度误差/nT | MFI | G | 130 | |
| 测量深度误差 | 测深随机误差/m | DREF | R | 0.35 |
| 测深刻度系数误差/10-4 | DSF | S | 2.4 | |
| 拉伸类型误差/(10-7m-1) | DST | G | 2.2 |
2 误差分析模型的建立
为了简化计算,对误差分析模型做以下假设:①计算井眼位置的误差完全由测量误差引起;②在井眼轨迹测量的每一个测点都可以用3个向量元素表示,即测深D、井斜角I和方位角A,误差扩散模型中还要求了每一个测点上的工具面角τ;③不同的误差来源在统计上相互独立;④井眼位置的总误差等于测点各个误差的矢量和;⑤测量误差的大小与其相应的井眼位置变化呈线性关系。
2.1 误差源权函数误差源权函数表示误差ε测量仪器测量值对计算位置向量P的影响[6],可将其分解为1个3×1的向量,用来描述单位误差对测深、井斜角和方位角的影响。磁场的常数误差和水平磁场强度误差权函数可表示为:
 (1)
(1)  (2)
(2) 式中:B为磁场强度,T;θ为磁倾角,(°)。
钻具组合下垂误差和垂直轴向的磁性干扰误差权函数如下:
 (3)
(3)  (4)
(4) 测深误差、刻度误差以及拉伸类型误差的权函数如下:
 (5)
(5)  (6)
(6)  (7)
(7) 式中:H为垂深,m。
不对正误差的权函数定义为工具的X轴与Y轴上的2个无关联误差,这是2个与工具面角及井斜角相关的函数,如下式所示:
 (8)
(8)  (9)
(9) MWD中有12个基本的传感器误差源,每个误差源都有各自的加权函数,以重力加速度计在X轴上偏差权函数ABX为例,则有:
 (10)
(10)  (11)
(11) 式中:g为重力加速度,m/s2;GX、GZ为X方向和Z方向的重力加速度函数,与井斜角和方位角等参数有关。
权函数ABX为:
 (12)
(12) 对于存在磁干扰的测量结果,在修正了磁干扰后,相应的权函数就需要重新定义。此时可忽略BZ分量,用磁场计算值与期望值之间的最小向量距离来求解,进而可以得到修正后的权函数ABX,如式(13)所示。
 (13)
(13) 同理,可以推导出其它11个传感器误差的权函数。
2.2 误差模型建立井眼轨迹的测量中包括各种独立的误差源,假定所涉及的独立误差源的统计性质服从由均值和标准差所定义的正态分布,则每个测点处的物理误差源确定测点的1个误差。结合井眼轨迹位置的数学模型,可以把误差用向量的形式表示出来[7-8]。由于计算位移可以表示为相邻2个测点处的位置向量Δrk,所以第l测段的第k个测点上由第i个误差源引起的误差为:
 (14)
(14) 结合已建立的误差源的权函数,每个误差源所造成的误差都能用向量的形式表示出来,然后建立井眼位置不确定性的协方差矩阵。模型中用过的误差类型主要有随机误差、系统误差以及全局误差,因此可以对3种误差类型分别进行研究。
对于随机误差,当计算点在测点上时,在整个l测段上第i个误差源引起的位置不确定性可以表示为:
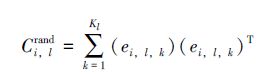 (15)
(15) 当计算点不在测点上时,所有测段上第i个误差源引起的位置不确定性可以表示为
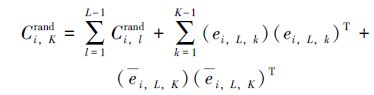 (16)
(16) 同理,对系统误差有:
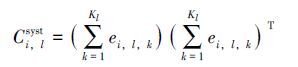 (17)
(17) 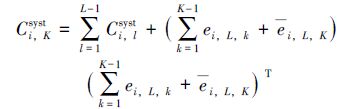 (18)
(18) 无论计算点是否在测点上,全局误差都可以表示为:
 (19)
(19) 通过对以上3种误差类型的求和,就可以得到任一点处总位置不确定性的协方差矩阵:
 (20)
(20) 将其转换成井眼坐标系下的协方差矩阵和误差偏差会更加直观,井眼坐标系包括高边方向、侧向和沿井眼方向,则转换矩阵为:
 (21)
(21) 井眼坐标系下不确定性矩阵为:
 (22)
(22) 井眼位置不确定性与误差的协方差矩阵对应关系井眼位置在井眼参考坐标系下的不确定性,可以直接由误差的协方差矩阵求得。但这样表示的位置不确定性不能直观地反映井眼位置误差的范围,也不利于邻近井相互关系的描述。
在井眼轨迹测量中,一般假定井眼位置的坐标服从正态分布,如果用r表示井眼上某点的位置增量,则通过正态分布概率密度函数,可以容易找出三维正态分布空间内概率密度相等的点  ,m为放大因子。根据矩阵代数,正好是一个相似空间椭球的表达式,给定1个m值就可以得到1个椭球[8],因此轨迹上一点(a,b,c)在大地坐标系O-XYZ中的误差椭球方程可表示为:
,m为放大因子。根据矩阵代数,正好是一个相似空间椭球的表达式,给定1个m值就可以得到1个椭球[8],因此轨迹上一点(a,b,c)在大地坐标系O-XYZ中的误差椭球方程可表示为:
 (23)
(23) 式中:λ为矩阵的特征值。
为了能够更好地量化2井眼之间碰撞风险的高低,引入分离系数的概念[9]。分离系数F定义为2井测点之间的距离与2测点误差椭球长半轴之和的比,如图2所示,其计算公式如下:
 (24)
(24)

|
| 图 2 分离系数示意图 Fig.2 Schematic of the separating factor |
分离系数可以量化2井之间的碰撞风险级别,若F>1,则说明2井之间不存在相碰风险;若F=1,则说明2井之间有相碰的风险;若F<1,则说明2井可能已经相碰。分离系数综合考虑了测点之间的距离和位置不确定性等因素,在实际应用时,可以设置多种分离系数的警告级别,以便监控2井的位置关系,在风险井段采取相应的防碰措施。工程上一般认为分离系数大于1.5时,2井不存在碰撞风险。
3 实例分析在长宁某页岩气田平台上选取2口相邻水平井H1井和H2井,井口间距10 m,2口井的井眼轨迹分段数据如表2和表3所示。
| 测深/m | 井斜角/(°) | 方位角/(°) | 垂深/m | 北坐标/m | 东坐标/m | 每30 m井眼曲率/(°) |
| 1950.00 | 0.00 | 0.00 | 1 950.00 | 0.00 | 0.00 | 0.000 |
| 2391.38 | 73.56 | 62.03 | 2 279.73 | 115.60 | 217.71 | 5.000 |
| 2506.58 | 73.56 | 62.03 | 2 312.32 | 167.42 | 315.30 | 0.000 |
| 2940.92 | 96.84 | 345.00 | 2 355.00 | 534.45 | 469.06 | 5.500 |
| 3948.08 | 96.84 | 345.00 | 2 235.00 | 1 500.38 | 210.30 | 0.000 |
| 测深/m | 井斜角/(°) | 方位角/(°) | 垂深/m | 北坐标/m | 东坐标/m | 每30 m井眼曲率/(°) |
| 1930.00 | 0.00 | 0.00 | 1 930.00 | 8.66 | 5.00 | 0.000 |
| 2212.12 | 47.02 | 47.80 | 2 181.50 | 82.16 | 86.05 | 5.000 |
| 2262.10 | 47.02 | 47.80 | 2 215.58 | 106.72 | 113.13 | 0.000 |
| 2676.54 | 97.53 | 345.00 | 2 350.00 | 460.41 | 182.78 | 5.500 |
| 4088.71 | 97.53 | 345.00 | 2 165.00 | 1 812.71 | -179.56 | 0.000 |
计算参数:重力加速度9.080 665 m/s2,磁场强度52 315 nT,磁倾角55.65°,磁偏角-7.35°。以H2井作为参考井,H1井作为比较井,采用最短距离扫描法并结合建立的误差模型进行全井段的防碰计算分析。
图3为H1井和H2井最短距离扫描结果,图中能够直观地反映参考井和比较井间的相对位置关系,其中圆周表示方位角,圆环表示测点距离。

|
| 图 3 H1井和H2井最短距离扫描结果 Fig.3 The minimum distance scanning |
图4为H1井和H2井分离系数曲线。

|
| 图 4 分离系数曲线 Fig.4 The separating factor curv |
图4中红线表示分离系数为1.5,为安全起见,工程上一般认为分离系数小于1.5的井段存在碰撞风险。参考井H2与比较井H1在1 500~2 000 m井段轨迹有靠近的趋势且分离系数小于1.5,造斜点位置附近分离系数最小。因此,需要采取相应的井眼轨迹控制措施,以免发生2井相碰事故。
4 结论(1) 介绍了常用的几种井眼间距计算方法的计算原理,分析了经典WdW误差模型的缺点和不足,认为该模型已经不再适用于现代三维水平井的轨迹误差分析工作。
(2) 详细分析了随钻测量仪器MWD的测量误差源,基于误差的统计性质,将误差分为随机误差、系统误差和全局误差,并给出了相应的误差源权函数
(3) 将每一项误差视为独立的误差源,建立了基于MWD测量误差的误差分析模型,推导了轨迹空间位置不确定性的协方差矩阵和任一测点的误差椭球公式。
(4) 实例分析结果表明,误差分析模型能够更直观地展示比较井和参考井的相对位置,更精确地计算邻井的相碰概率,可为今后页岩气“井工厂”的防碰分析提供参考。
| [1] | POEDJONO B,ZABALDANO J P,SHEVCHENKO I,et al.Case studies in the application of pad design drilling in the Marcellus shale[R].SPE139045,2010. |
| [2] | 谈心, 贺婷婷, 王富群, 等. 日光油田"井工厂"关键技术应用研究[J]. 石油机械, 2015, 43 (2) : 34–39 . |
| [3] | BEAUDOIN Y,SERRY J K.Shale gas development in Canada:The regulatory framework[R].SPE 138105,2010. |
| [4] | 鲁港, 邢玉德, 吴俊林, 等. 邻井防碰计算的快速扫描算法[J]. 石油地质与工程, 2007, 21 (2) : 78–81 . |
| [5] | WOLFF C J M, De WARDT J P. Borehole position uncertainty-analysis of measuring methods and derivation of systematic error model[J]. Journal of Petroleum Technology, 1981, 33 (12) :2338–2350 . |
| [6] | WILLIAMSON H S, WILSON H F. Directional drilling and earth curvature[J]. SPE Drilling & Completion, 2000, 15 (1) :37–43 . |
| [7] | 董本京, 高德利, 柳贡慧. 井眼轨迹不确定性分析方法的探讨[J]. 天然气工业, 1999, 19 (4) : 59–63 . |
| [8] | 苏斐, 高德利, 赵全庆. 井眼轨迹误差椭球三维可视化方法研究[J]. 昆明理工大学学报(自然科学版), 2011, 36 (3) : 1–4 . |
| [9] | 刁斌斌, 高德利. 邻井定向分离系数计算方法[J]. 石油钻探技术, 2012, 40 (1) : 22–27 . |