 2016,
Vol. 25
2016,
Vol. 25



2. 同济大学 机械工程学院, 上海 200092
随着中华绒螯蟹(Eriocheir sinensis)养殖的规模化和人力成本的上升,传统的养殖模式已逐渐不能满足快速增长的养殖成本和高质量蟹苗的要求,智能化水产养殖将成为今后养殖模式的发展方向。由于中华绒螯蟹耐低氧能力较差,水中溶氧量(DO)较低便会对其摄食、脱壳、变态起到抑制作用甚至导致蟹苗死亡,因此对蟹塘溶氧量的监测和控制显得十分重要。目前在国外,美国、法国和日本已经通过先进的传感器感知技术、数据融合传输技术以及互联网技术建立覆盖全国的农业信息化平台,工厂化水产养殖已有相当大的自动化程度,在水质环境监控方面,虽然水产养殖监控设备有着较高测量精度,但在信息传输方面大多以有线方式,成本较高[1]。在国内,史兵等设计了基于无线传感网络的规模化水产养殖智能监控系统[2],李慧等设计了基于物联网的Android平台的水产养殖远程监控系[1],马从国等设计了基于无线传感器网络的水产养殖池塘溶解氧智能监控系统[3],张新荣等设计了基于模糊控制的水产养殖环境参数监控系统[4]。虽然他们设计的水产养殖控制系统都取得了一定的效果,但采用的控制多为常规PID控制和模糊PID控制,仍存在响应速度和精度上的不足。
本文对某中华绒螯蟹养殖基地进行Zigbee网络构建,并针对中华绒螯蟹的溶氧需求,采用基于模糊RBF神经网络(Fuzzy RBF)的PID控制策略进行智能供氧,可以实时、精确、快速地完成溶氧量的监控,满足蟹对溶氧量的需求,改善蟹的生活环境,从而保证养殖扣蟹的质量。
1 中华绒螯蟹监控系统整体框架随着水产养殖的逐渐规模化,传统的有线传输则存在布线难,维护难,成本高的问题。鉴于ZigBee的无线网络技术具有高性能、低功耗、短距离传输成本低、维护简单等特点[5],本系统构建了基于簇状拓扑结构的Zigbee无线传感网络,并针对中华绒螯蟹生活习性进行设计,按蟹种生长的环境需求进行智能化、自动化监控。系统由控制层、信息汇聚传输层、远程终端端组成。其中,溶氧量监控部分的框架图如图 1所示。

|
图 1 溶氧量监控系统框架
Fig. 1 System framework of the DO monitoring system
|
控制层为系统的核心层,主要由各传感器、Zigbee无线模块、各控制器组成,采集部分负责采集并将采集的温度、pH、溶氧量、水位等数据传送给Zigbee路由器进行转发,控制部分负责执行上层下达的水阀、投饵、增氧机等控制命令,图 1的控制层为溶氧量的控制,采用基于模糊RBF的PID控制器对水体溶氧量进行实时控制。
汇聚传输层主要由Zigbee协调器、监控计算机、服务器组成。一方面负责将Zigbee路由器转发的采集信息汇聚上传至Zigbee协调器,经监控计算机直至上传至服务器,另一方面负责转发由客户终端下达的命令请求至各个控制器。
远程终端由Android手机和PC组成,用户可以通过网页和手机客户端的水质监控平台实时查看蟹塘的各项水质参数和监控视频,实现对养殖基地的远程管理。监控平台主要由监控视频、实时查询、分时段查询、监测均值查询、报警查询、投喂量记录、天气查询,部分功能如图 2所示。

|
图 2 蟹塘水质监控平台
Fig. 2 Water quality monitoring platform of crab pond
|
针对溶氧量变化的非线性、大滞后、不确定、大惯性等特点,常规PID和模糊PID难以达到较高的控制精度,为此本文采用基于模糊RBF的PID控制器对系统进行控制,基于模糊RBF神经网络的PID控制器在常规PID控制器基础上以系统的偏差值e和变化率ec为模糊神经网络的输入,通过变换论域实现速率和精度的协调,并通过自身RBF神经网络的学习功能,不断地对控制参数kp、ki、kd进行优化,从而改善系统控制性能,其原理框图由图 3所示。

|
图 3 模糊RBF的PID控制器的原理图
Fig. 3 principle diagram of fuzzy RBF PID controller
|
其中rin为系统的输入,即溶氧量的设定值;yout是系统的输出,即底层与中层水体溶氧量的平均值;e是给定溶氧量的理论和实际的偏差值;ec是溶氧量的理论和实际的偏差值变化率;u为PID控制的输出, 即增氧机的开启阀度;模糊RBF神经网络输出为PID的3个控制参数kp、ki、kd。
2.1 监控系统的溶氧最优控制值由养殖人员经验,蟹苗的生长环境在5.0 mg/L~8.0 mg/L最为适宜,该区间内溶氧量的增加对蟹的产量有一定的促进作用,但是耗电成本也会随之增加,所以需要找出产值和成本的平衡点,从而确定溶氧量的理想控制值,实现在蟹苗健康生长的前提下实现利润的最大化。
选取7个对比蟹塘进行试验,蟹塘大小为0.14 hm2到0.21 hm2不等,每个试验塘均采用750 W衡风牌鼓风机进行增氧,分别设定蟹塘中增氧控制值为5.0 mg/L、5.5 mg/L、6.0 mg/L、6.5 mg/L、7.0 mg/L、7.5 mg/L、8 mg/L (蟹塘中水下40 cm与水下60 cm的平均溶氧值),由于每个蟹塘大小不一,所以需统计出每个蟹塘的5-12月份单位利润来进行对比,扣蟹售价按20元/斤,电费为0.7元/度。5-12月份统计数据如表 1所示。

|
表 1 利润与溶解氧设定值关系 Tab.1 Relationship between profit and the setting value of dissolved oxygen |
根据以上数据,结合Matlab曲线拟合可以推算出最大利润的对应的设定溶氧量的值(如图 4所示)。由拟合图可以得出,当溶氧量设定值约为6.8 mg/L时,可以实现经济效益的最大化,并非溶氧量设定值越高越好,因此需要对溶氧量进行精确控制。

|
图 4 溶解氧设定值和年利润曲线
Fig. 4 Curve between the profit and DO
|
溶氧量控制系统通过模糊RBF神经网络确定kp、ki、kd,其神经网络结构一共分为4层,其网络输入为溶氧量误差值e和溶氧量误差变化率ec,网络输出为PID的3个控制参数kp、ki、kd,如图 5所示。

|
图 5 模糊RBF网络结构
Fig. 5 fuzzy RBF network structure
|
第一层为输入层:
该层作用为传递输入值到下一层,此层包含溶氧量误差值e和溶氧量误差变化率ec两个节点,其输入输出关系为式(1):
 (1)
(1)
式中:m=1,2;当m=1时,x1=e, 当m=2时,x2=ec。
第二层为模糊化层:
该层作用为将输入值进行模糊化,其中输入值溶氧量误差值e和溶氧量误差变化率ec其基本论域分别设为[-8,8]和[-3,3], 输出kp、ki、kd基本论域分别为[-15,15],[-1,1], [-6,6],当实际溶氧量yout逐渐接近溶氧量控制值rin, 则对系统的控制精度要求也随之变高。将溶氧量误差值e和误差变化率ec的模糊论域均设置{NB, NM, NS, ZO, PS, PM, PB}7个子集,则该层共有7个节点,其中第m个输入隶属于第n个模糊子集的隶属度函数如式(2):
 (2)
(2)
式中:m=1, 2;n=1, 2, 3, 4, 5, 6, 7,其中dmn, σmn分别为隶属度函数的均值和标准差, 几何上为该函数的中心值和宽度。
第三层为模糊推理层:
该层作用为将模糊子集进行组合,即分别从溶氧量误差值e和溶氧量误差变化率ec的模糊论域中选取一个子集进行组合。该层有7个节点,每个节点对应一个模糊规则,每个规则的适用度为该节点的2个输入隶属度函数乘积,如式(3)
 (3)
(3)
式中:p、q=1, 2, 3, 4, 5, 6, 7。则可以得到该层输出矩阵,如式(4)
 (4)
(4)
第四层为输出层:
该层作用为将溶氧控制PID的3个控制参数kp、ki、kd输出,输出等于49*3连接权矩阵w乘以模糊推理层的输出矩阵f3, 如公式(5)
 (5)
(5)
本系统采用增量式PID控制算法,控制误差信号e和ec为式(6)
 (6)
(6)
式中:rin (k)为溶氧量的控制值,yout(k)为溶氧量的实际值。
神经网络整定指标为公式(7)
 (7)
(7)
系统采用的增量PID控制算法为式(8)
 (8)
(8)
式中:kp、ki、kd的系数为xc (1)、xc (2)、xc (3)
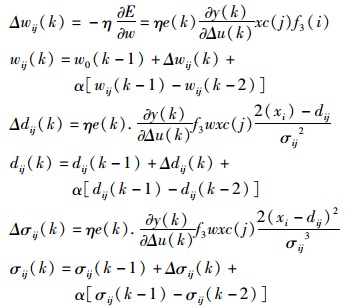
通过k值递增,实现神经网络整定指标最优,其中,神经网络的输出权值w、隶属度函数中心值d和宽度σ的学习方法采用梯度下降法, 如式(9)
 (9)
(9)
式中:η为学习速率,取值0.20, α为动量因子,取值0.04;
仿真系统以小型养殖池为例,假设仅以鼓风形式引起池塘增氧,酸碱度、温度均为恒定值,且只存在蟹苗而无其他生物,则控制系统近似为一阶惯性比例时延系统[7],其传递函数为式(10)
 (10)
(10)
式中:K0为信号放大倍数、W0为时间常数、τ0为延迟时间,仿真系统取K0为0.1,W0为10.3,τ0为4.5。文中采用Matlab进行仿真实验,对基于模糊RBF的PID控制器和常规PID控制器、模糊PID控制器进行分析比较。
当系统的输入为6.8时,基于模糊RBF神经网络的PID控制器、模糊PID控制器、常规PID控制器的零状态响应对比如图 6所示。其中模糊RBF神经网络的PID控制器超调量几乎为0,模糊PID控制器为7.3%,常规PID控制器为16.1%。模糊RBF神经网络的PID控制器约在50 s处达到稳态,模糊PID控制器约在65 s时达到稳态,常规PID控制器约为70 s处达到稳态。

|
图 6 各PID控制器效果对比
Fig. 6 Effect comparison of the every PID controller
|
实际增氧控制系统为非线性系统,受养殖环境影响较大,所以难以确定其数学模型,为了考查基于模糊RBF神经网络的PID控制器对实际中面积较大的蟹塘的监控适应能力,文中选取二块大小均为0.18公顷的蟹塘进行实验,其中7号蟹塘采用模糊PID控制器,11号蟹塘采用基于模糊RBF神经网络的PID控制器,每个池塘均配有750 W衡风牌鼓风机和两个位于蟹塘中心位置的溶氧量传感器(水下40 cm、水下80 cm)。
通过提前增氧使两个对比蟹塘的初始溶氧量值相近,设定的增氧控制值均为6.8mg/L并将中层水和底层水溶氧量的平均值作为控制量,由于溶氧量变化存在滞后性,因此于上午7:45开启增氧机开始实验,对8:00-9:00的增氧效果明显阶段进行分析对比。通过溶氧量传感器节点将采集的数据经Zigbee网络、internet最终传送至终端PC,从终端PC的网页中可以实时查看两个蟹塘的增氧状态(图 7)。

|
图 7 11、7号蟹池的底层、中层溶氧量变化
Fig. 7 The changes of DO in the middle and bottom of #11, #7 crab pond
|
导出7号、11号蟹塘的底层、中层溶氧量变化值,得到中层和底层的平均溶氧量的变化曲线,如图 8所示。从图 8可以看出,模糊RBF改进的PID控制器超调量为3.6%,达到稳态用时约50 min, 最大稳态误差为0.06,而使用模糊PID控制器超调量为7.2%, 达到稳态用时60 min,最大稳态误差为0.18。可以看出,基于模糊RBF神经网络的PID控制器较模糊PID控制器超调量缩小2倍,达到稳态用时缩短了10 min,最大稳态误差减小了3倍。

|
图 8 蟹塘中层底层的平均溶氧量变化
Fig. 8 The average DO change of crab pond
|
由此可见,基于模糊RBF神经网络的PID控制器,较模糊PID控制器、传统PID控制器拥有更短的过渡时间、更小的超调量、更高的控制精度,且由于神经网络的自学习能力,能够不断地在线调节控制参数,使系统的自适应能力更高。
4 结论采用Zigbee无线网络的中华绒螯蟹养殖系统能够顺利地完成数据采集和传输工作,节约了规模化养殖带来人力成本,使养殖人员能远程实时对养殖基地进行监控;通过Matlab以增氧效果为标准对常规PID控制器和模糊PID控制器、基于模糊RBF神经网络的PID控制器进行仿真分析,同时在中华绒螯蟹某养殖基地进行模糊PID控制器和基于模糊RBF神经网络的PID控制器的应用实验对比,结果表明,采用基于模糊RBF神经网络的PID控制器的系统能够更快速更准确地完成溶氧量的调节工作,使中华绒螯蟹的养殖有了更好的保障。
| [1] | 李慧, 刘星桥, 李景, 等.基于物联网Android平台的水产养殖远程监控系统[J]. 农业工程学报, 2013, 29(13): 175–181. LI H, LIU X Q, LI J, et al.Aquiculture remote monitoring system based on IOT Android platform[J]. Transactions of the Chinese Society of Agricultural Engineering, 2013, 29(13): 175–181. |
| [2] | 史兵, 赵德安, 刘星桥, 等.基于无线传感网络的规模化水产养殖智能监控系统[J]. 农业工程学报, 2011, 27(9): 136–140. SHI B, ZHAO D A, LIU X Q, et al.Intelligent monitoring system for industrialized aquaculture based on wireless sensor network[J]. Transactions of the CSAE, 2011, 27(9): 136–140. |
| [3] | 马从国, 赵德安, 王建国, 等.基于无线传感器网络的水产养殖池塘溶解氧智能监控系统[J]. 农业工程学报, 2015, 31(7): 193–200. MA C G, ZHAO D A, WANG J G, et al.Intelligent monitoring system for aquaculture dissolved oxygen in pond based on wireless sensor network[J]. Transactions of the Chinese Society of Agricultural Engineering, 2015, 31(7): 193–200. |
| [4] | 张新荣.基于模糊控制的水产养殖环境参数监控系统设计[J]. 安徽农业科学, 2010, 38(26): 14761–14763. ZHANG X R.Design on monitoring system of aquiculture with environmental factors based on fuzzy control[J]. Journal of Anhui Agricultural Sciences, 2010, 38(26): 14761–14763. |
| [5] | 史兵.河蟹池塘养殖智能支持系统关键技术研究[D].镇江:江苏大学, 2013. SHI B. Research on the key techniques of intelligent support system for crab breeding in ponds[D]. Zhenjiang:Jiangsu University, 2013. http://cdmd.cnki.com.cn/Article/CDMD-10299-1014136619.htm |
| [6] | 黄大志, 胡建华.水产养殖中溶解氧模糊控制系统的研究[J]. 农机化研究, 2013, 34(10): 58–61. HUANG D Z, HU J H.Research on the dissolved oxygen fuzzy control system in the aquaculture[J]. Journal of Agricultural Mechanization Research, 2013, 34(10): 58–61. |
| [7] | SERFASS D, YOSHIGOE K. Wireless sensor networks using android virtual devices and near field communication peer-to-peer emulation[C]//Proceedings of 2013 IEEE Southeastcon. Jacksonville, FL, USA:IEEE, 2012:1-6. |
| [8] | 柳宇航.开关模糊神经PID控制的无刷直流电机仿真[J]. 计算机仿真, 2013, 30(9): 344–348. LIU Y H.Simulation of switch fuzzy network control of BLDCM[J]. Computer Simulation, 2013, 30(9): 344–348. |
| [9] | 邓肖, 刘宗玲, 杨朝, 等.改进的PID神经网络在黑液液位控制中的应用[J]. 中国造纸学报, 2014, 29(2): 58–62. DENG X, LIU Z L, YANG C, et al.Study on the control of black liquor level based on improved PID neural network[J]. Transactions of China Pulp and Paper, 2014, 29(2): 58–62. |
| [10] | 李岩, 苏学军.基于模糊径向基函数神经网络的PID控制算法仿真研究[J]. 自动化与仪器仪表, 2014: 1–2. LI Y, SU X J.Simulation study algorithm based on fuzzy radial basis function neural network PID control[J]. Automation & Instrumentation, 2014: 1–2. |
| [11] | 鲍鸿.广义模糊RBF神经网络及在多变量控制系统中的应用[D].武汉:华中理工大学, 1999. BAO H. Generalized fuzzy RBF neural network and its application in multivariable control system[D]. Wuhan:Huazhong University of Science and Technology, 1999. |
| [12] | 宗陆军, 李雪梅, 邓仁桥.基于BP神经网络的模糊PID风量控制[J]. 桂林电子科技大学学报, 2014, 34(2): 131–134. |
| [13] | 夏俊, 凌培亮, 虞丽娟, 等.基于量子遗传算法的无线传感网络路由优化[J]. 同济大学学报(自然科学版), 2015, 43(7): 1097–1103. XIA J, LING P L, YU L J, et al.Routing optimization on wireless sensor networks based on quantum genetic algorithm[J]. Journal of Tongji University (Natural Science), 2015, 43(7): 1097–1103. |
| [14] | 虞丽娟, 杨劲松, 凌培亮, 等.基于物联网智慧服务的中华绒螯蟹蟹种质量动态追溯系统研究[J]. 水产学报, 2013, 37(8): 1262–1269. DOI:10.3724/SP.J.1231.2013.38624 YU L J, YANG J S, LING P L, et al.Research on dynamic quality traceability system of Eriocheir sinensis seedling based on IOT smart service[J]. Journal of Fisheries of China, 2013, 37(8): 1262–1269. DOI:10.3724/SP.J.1231.2013.38624 |
2. College of Mechanical engineering, Tongji University, Shanghai 200092, China