 2012, Vol. 70
2012, Vol. 70中国气象学会主办。
文章信息
- 张 宇, 陈德辉, 薛纪善, 马旭林. 2012.
- ZHANG Yu, CHEN Dehui, XUE Jishan, MA Xulin. 2012.
- 湿度因子对适应性观测敏感区估算的影响研究
- Study of the influence of the humidity factor on estimation in the adaptive observation sensitive region
- 气象学报, 70(1): 91-100
- Acta Meteorologica Sinica, 70(1): 91-100.
- http://dx.doi.org/10.11676/qxxb2012.008
-
文章历史
- 收稿日期:2010-01-27
- 改回日期:2011-01-05




2. 南京信息工程大学,南京,210044;
3. 国家气象中心,北京,100081
2. Nanjing University of Information Science and Technology, Nanjing210044, China;
3. National Meteorological Centre, Beijing100081, China
数值天气预报在本质上是一个初边值问题,模式初值能否准确地描述大气运动状态将决定着数值预报的成败。近年来,科学家针对预报误差增长及其传播特征和可预报性问题的深入研究发现,高影响天气系统的上游通常存在相应的观测敏感区,在理论上,如在该敏感区域加强观测改善模式的初值,能够提高数值预报的质量。据此,多位学者(Rabier et al,1996; Pu et al,1997; Bergot et al,1999)提出了适应性观测或目标观测的概念:在预先确定的敏感区域加强气象观测,并将其作为常规观测资料的补充和背景场(短期预报结果)一起同化,从而得到更优的初始场。敏感区是指分析误差在预报过程中会迅速增长从而导致预报质量的下降的一些局部区域。由此可见,敏感区的确定是适应性观测的核心内容。目前识别敏感区的主要方法为奇异向量法(SV)、集合卡尔曼滤波变换法(ETKF)和条件非线性最优扰动法(CNOP)(穆穆等,2007)等。其中,集合卡尔量滤波变换法具有程序设计简单、不需要伴随模式等优点,基于预报对观测的敏感性,在集合空间中快速求解卡尔曼滤波方程,并能直接估计出通过加密观测能在多大程度上降低预报误差协方差(田伟红等,2007;雷荔傈等,2008)。谭晓伟(2009)提出了2种求解条件非线性最优扰动的快速算法,并通过观测系统模拟实验(OSSE)检验了其有效性和可行性。
马旭林(2008)搭建了基于集合卡尔曼滤波变换适应性观测敏感区估算方案,湿度因子没有被考虑在内。因此,是一个“干”方案。该方案中风场和温度场是参与敏感区估算的物理量。敏感区信号度量方式为基于总能量的“干”方案度量标准

集合卡尔曼滤波变换的理论基础为卡尔曼滤波(Kalman,1960)。集合卡尔曼滤波变换利用集合变换的理论,在集合空间中求解卡尔曼滤波方程,并直接计算出观测所带来的预报(分析)误差的减少(Bishop et al,1999,2001; Snyder,1996; Majumdar et al,2001; Bouttier et al,2002; Baker et al,2000)。
基于上述理论搭建的基于集合卡尔曼滤波变换的适应性观测敏感区估算方案,其核心部分为观测所带来的预报(分析)误差减少即信号方差 S(ti+M| H i)的计算,其中,ti+M为第M个目标观测时刻,Hi为第i种观测方案所对应的观测算子。具体计算流程为
步骤1:根据k个集合成员在t时刻的集合预报资料 x(t,k| Hr),计算集合扰动矩阵 X(t| H r)

步骤2:由式(3)可得第M次目标观测时刻预报误差协方差 P(ti+M| H r)
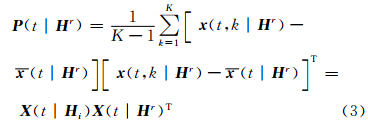





步骤3:假设模式为线性动力算子,由卡尔曼滤波(Welch et al,2006)可知,在目标观测时刻加入适应性观测资料,t时刻的预报误差协方差可表示为

重复步骤2、3得到不同观测方案 H i下的信号方差,并进一步找到最优观测方案。若每个观测方案为一个格点,可得到最后信号方差综合图,即各个格点对验证区误差贡献的大小,从而找出适应性观测敏感区(信号方差大值区)。 3 试验方案设计
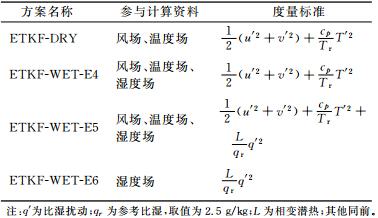
根据上述集合卡尔曼滤波理论,可以通过程序实现敏感区的估算(图 1)。马旭林(2008)给出了以风场和温度场作为参与计算资料,以干空气扰动总能量作为度量标准的敏感区估算方案(ETKF-DRY),本文在原干方案(ETKF-DRY)中加入湿度 场以及修改相应的度量标准,旨在找出湿度场在敏感区估算中的作用。
 |
| 图 1 适应性观测敏感区估算方案流程Fig. 1 Flow chart for the adaptive observation scheme |
为显示湿度场资料在敏感区估算中的作用,根据上述计算流程,再设计3个不同方案,进行相关的对比分析,其主要区别在于参与计算的资料以及度量标准。为便于讨论,3个方案分别命名为ETKF-WET-E4、ETKF-WET-E5、ETKF-WET-E6。ETKF-WET-E4方案中参与计算的资料为风场、温度场以及湿度场,而最后的度量标准中只包含扰动风场和扰动温度场;ETKF-WET-E5方案中参与计算的资料为风场、温度场以及湿度场,最后的度量标准中采用包含湿扰动的全能量形式;ETKF-WET-E6方案中参与计算的资料只有湿度场,度量标准也只有湿扰动(表 1)。
为了检验上述方案的准确性,需对相关个例试验进行检验。选取2008年年初的冰冻雨雪灾害过程进行模拟。 4.1 试验基本参数确定
首先确定高影响天气区(验证区),然后根据验证区寻找与之对应的敏感区,在敏感区中加强观测从而达到改进验证区预报的目的(图 2)。进行适应性观测试验需要确定相关的试验参数:集合预报初始时刻、目标观测时刻、验证时刻以及验证区。
 |
| 图 2 适应性观测策略简要流程(ti为集合预报初始时刻;ti+m为目标观测时刻,m=1,2…,表示有m个目标观测时刻;tv表示验证时刻)Fig. 2 Flow chart of the decision-making process of the adaptive observation(ti is the initial time of the ensemble prediction; ti+m is the adaptive observation time with m=1,2… meaning the number of the observation; tv is the verification time) |
2008年年初的冰冻过程,在1月25—29日雨雪灾害强度达到最大。25日00时(世界时,下同)启动了重大气象灾害预警应急预案。据此选取试验验证时刻tv为2008年1月27日12时,集合预报初始时刻ti为2008年1月25日00时,目标观测时刻ti+m分别为:2008年1月27日12时-48 h(验证时刻前48 h,下同)、-36 h、-24 h、-12 h、-0 h。 4.2 验证区的选取
由适应性观测策略和理论可知,所谓敏感区其本质就是预报误差的主要来源区,应该与验证区的预报误差相联系。在进行目标观测试验时,主要通过高影响天气发生区域来选取相关验证区(Wu et al,2005; 马旭林,2008)。但如果在计算暴雨个例时,将一降雨大值区选取为验证区,则由此追踪到的敏感区可能很“泛”,区域大,计算量大。在具体模拟试验中,只是为了验证搭建方案的完整性,本文采用数值模拟的方式,通过寻求预报误差大值区,并以此作为验证区,最终完成敏感区的追踪和方案验证工作,由此而来计算范围缩小,随之计算量也相应减少,而且有目标更加集中的效果。
具体而言,可以通过以下两组方案的对比得到验证区:两组方案预报模式均为GRAPES-GFS1.0(GRAPES全球预报模式1.0),该模式是在GRAPES区域非静力中尺度模式系统基础上,将其扩展为全球的非静力半隐式半拉格朗日格点模式,采用了Arakawa C网格的变量水平布点方案。连续107 d的统计学检验结果表明,该模式在北半球的可用预报时效达6 d,与原T213L31基本相当。天气学检验表明,该模式对西风带大尺度环流形势的演变调整、对副热带高压(简称副高)脊线的北抬、南亚高压活动等都有较强的预报能力,但对副高西伸脊点的预报比实况偏西(陈德辉等,2006; 薛纪善等,2008)。两组模式的主要区别在于所选初始场不同,模拟-1所用初始场为2008年1月26日00时NCEP全球模式分析资料;模拟-2所用初始场为2008年1月25日18时NCEP全球资料经GRAPES-GFS1.0的6 h预报场(图 3)。
 |
| 图 3 模拟试验确定验证区方案对比Fig. 3 The comparison of the two simulation experiments |
通过对比模拟-1和模拟-2预报场结果即可得到由不同初始场所引起的预报误差。采用模拟-2相对模拟-1的偏差 ×100%来比较其误差:其中,h1,h2分别表示模拟-1和模拟-2的高度场。
×100%来比较其误差:其中,h1,h2分别表示模拟-1和模拟-2的高度场。
选用不同的初始场将影响模式模拟的高度场形势,致使中国西南地区(图 4中黑圆点所围区域)的高度场形势有显著差异:模拟-2中采用模式6 h预报场作为初始场所引起预报误差大值区正出现在2008年中国西南冰冻雨雪灾害天气严重区。故选取此区域为验证区(25°—30°N,100°—110°E)。
 |
| 图 4 模拟-2相对模拟-1的850 hPa高度场偏差(彩色区,黑圆点所围区域为偏差的大值区)及500 hPa高度场(实线,单位:gpm)Fig. 4 Differences in the height field at 850 hPa between simulation 1 and simulation 2(the area circled by the dotted line is the large difference area; the black line is the height at 500 hPa) |
集合预报资料采用TIGGE-CMA(交互式全球大集合预报系统—中国气象局)存储中心提供的欧洲数值预报中心(ECMWF)全球预报资料,集合成员数为13,水平分辨率为2.0° × 2.0°,时间间隔12 h,预报时效72 h,适应性观测方案计算时选取850、500、200 hPa共3个气压层的温度、纬向风、经向风与比湿。计算范围为 10°—50°N,60°—°120°E。 5.2 结果分析
计算所得信号方差综合图能够直接反映目标观测对验证区预报误差方差减少的贡献。不同的目标观测时刻对应不同相对大小的信号方差,因此,在信号方差综合图(图 5—9)中,采用标准化信号方差公式,使其成变化范围为0—1的无量纲的相对值,以便更加方便地进行目标观测定位。下面对不同方案计算在目标观测时刻所得信号方差综合图进行分析讨论。
 |
| 图 5 4个不同方案计算所得的目标观测时刻2008年1月27日12时-0 h信号方差(a.ETKF-DRY,b.ETKF-WET-E6,c.ETKF-WET-E4,d.ETKF-WET-E5;实线为500 hPa高度场,单位:gpm;彩色区为信号方差大值区,黑色方框区域为验证区)Fig. 5 Signal variance charts at 12:00 UTC 27 Jan 2008 which are calculated by the four schemes(a. ETKF-DRY,b. ETKF-WET-E6,c. ETKF-WET-E4,d. ETKF-WET-E5; the black line is the height at 500 hPa; the colour area is the high signal variance area; the rectangular area is the verification area) |
 |
| 图 6 ETKF-DRY方案在不同目标观测时刻计算所得的信号方差(a、b、c、d.目标观测时刻为2008年1月27日12时-48 h、-36 h、-24 h、-12 h;实线为500 hPa高度场,单位:gpm;彩色区为信号方差大值区,黑色方框区域为验证区)Fig. 6 Signal variance charts at the different adaptive observation time against the targeting time of 12:00 UTC 27 Jan 2008 which are calculated by the ETKF-DRY scheme(a. -48 h,b. -36 h,c. -24 h,d. -12 h; see the text for farther details; the black line is the height of 500 hPa,the colour area is the high signal variance area,and the rectangular area is the verification area) |
 |
| 图 7 ETKF-WET-E4和ETKF-WET-E5方案在不同目标观测时刻计算所得的信号方差(a、b. 2008年1月27日12时-36 h,c、d. 2008年1月27日12时-12 h;实线为500 hPa高度场,单位:gpm;彩色区为信号方差大值区,黑色方框区域为验证区)Fig. 7 Signal variance charts at the different adaptive observation time against the targeting time of 12:00 UTC 27 Jan 2008 which are calculated by the ETKF-WET-E4 and ETKF-WET-E5 scheme(a/b. ETKF-WET-E5/ETKF-WET-E4 at -36 h; c/d. ETKF-WET-E5/ETKF-WET-E4 at -12 h; the black line is the height of 500 hPa,the colour area is the high signal variance area,and the rectangular area is the verification area) |
 |
| 图 8 ETKF-WET-E6方案在不同目标观测时刻计算所得的信号方差(a、b、c、d. 同图 6,实线为500 hPa高度场,单位:gpm;阴影区为信号方差大值区,黑色方框区域为验证区)Fig. 8 Signal variance charts at the different adaptive observation time which are calculated by the ETKF-WET-E6 scheme(The captions are the same as those in Fig. 6) |
 |
| 图 9 ETKF-DRY(a、b)和ETKF-WET-E6(c、d)方案在验证时刻前12 h计算所得的扰动场(a、c)和信号方差(b、d)对比(实线为500 hPa高度场,单位:gpm;箭头为500 hPa风矢量,阴影区为大值区,黑色方框区域为验证区)Fig. 9 The perturbation field and the signal variance charts at the different adaptive observation time against the targeting time of 12:00 UTC 27 Jan 2008 which are calculated by the ETKF-DRY and ETKF-WET-E6 schemes(a/c. The perturbation field,and b/d. The signal variance field of the ETKF-DRY/ETKF-WET-E6 is at -12 h(see the text for farther details). The black line is the height of 500 hPa,the arrow is the wind vector of 500 hPa,the left shadow area is the high perturbation area,the right shadow area is the high signal variance area,and the rectangular area is the verification area) |
从资料同化的理论角度易得,当目标观测时刻即为验证时刻,则敏感区即为验证区。并且,信号方差大值区应被包含于验证区之中。分析4种不同方案在目标观测时刻即为验证时刻的计算结果(图 5)可知,ETKF-DRY方案计算的一部分信号方差大值区被包含于黑色方框中,但其北部出现大量信号方差虚假区。因此,该方案的敏感区的选取并不十分理想。但ETKF-WET-E6方案计算所得信号方差大值区都被包含于验证区之中,也合理的去除了虚假的信号方差大值区。因此,该方案的计算效果更为理想。
对比ETKF-WET-E4和ETKF-DRY方案可知,加入湿度场后黑色方框中的信号方差大值区有所增加,而北部虚假信号方差有所减少,即在计算变量中增加湿度场以后,信号方差中包含湿度场信息 从而适当的改善敏感区。同理,对比ETKF-WET-E5方案和ETKF-DRY计算结果亦可发现,在度量标准中加入湿度场能量扰动(表 1)后,对敏感区的选取也有一定程度的改善。
对比ETKF-WET-E4和ETKF-WET-E5可知,度量标准中的湿度项( )所带来的信号方差改善并不明显。这是由于度量标准湿度扰动项中所占比重较小(大约为12%)。因此,对该敏感区的估算需要寻找更加合理的度量标准。
)所带来的信号方差改善并不明显。这是由于度量标准湿度扰动项中所占比重较小(大约为12%)。因此,对该敏感区的估算需要寻找更加合理的度量标准。
ETKF-DRY方案计算结果表明(图 6),信号方差大值区随着南支槽前西南气流自西南向东北方向移动,最后到达验证区。这说明能表征验证区预报误差方差减少的信号方差大值区也在随着天气方案变化。但该方案计算所得敏感区过于分散,不利于适应性观测的实施,即敏感区估算效果并不理想。
ETKF-WET-E4、ETKF-WET-E5方案也得到与ETKF-DRY类似结果(图 7),所求得的敏感区过于分散。因此,敏感区估算效果并不理想。相对而言,ETKF-WET-E5方案在度量标准中加入了扰动湿度项,故在验证时刻前12 h计算所得敏感区较ETKF-WET-E4更为集中,所得效果也较好。ETKF-WET-E6方案估算的敏感区(图 8)也随着槽前的西南气流逐渐向验证区靠近,与前述各个方案相比,其敏感区最为集中,利于目标观测地点的具体选定,该方案的计算结果最为理想。
上述试验表明湿度场在敏感区的估算中起着重要作用。本次灾害天气过程若参与计算资料只有湿度场,最后度量标准也只采用比湿扰动形式计算效果最为理想。这主要由于对该个例中南支槽往西南方向输送水汽是整个方案发展的关键所在,即湿度场综合体现了整个方案发展的动力和热力过程,而此次过程中验证区上游风场变化并不明显,故ETKF-WET-E6得到较为理想计算结果。 6 扰动场分析
由ETKF计算方案可知,参与计算的集合预报资料和敏感区的确定有着直接的联系,而在前述不同的方案中,若采用不同的初始计算资料得到敏感区不尽相同。本节将给出扰动场和敏感区的关系。若集合扰动矩阵为 X(t| H i)= x(t,k| H i)- x(t| H i),则第k个成员的扰动为: x ′(t,k| H i)= x(t,k| H i)- x(t| H i)。扰动场为


图 9给出了两个方案的信号方差大值区和扰动大值区对比情况。由所给出的ETKF方案的计算步骤可知,信号方差的大值区由资料的扰动场计算所得,即两个方案所得敏感区均与扰动场的分布有一定联系,但并不是和扰动场重合,这主要是由于敏感区的估算中考虑了天气系统的移动,以及模式的预报误差等其他因素。湿扰动场的大值区主要位于槽前的西南气流中,而对应求取的信号方差大值区也主要位于槽前,但是,信号方差大值区较扰动大值区偏东。干扰动场(风场、温度场扰动)主要分布在槽前西南气流以及中高纬度的西风带中,所估算出的敏感区有着一定的调整,减少了验证区北部虚假的信号方差大值区,但仍存在部分虚假大值区。总的说来,两个方案求取的敏感区和参与计算资料的扰动场相关,由于在中高纬度的湿度扰动值较小,湿度扰动主要发生在低纬度的南支槽前西南气流中,所求取的敏感区也与之相对应。而干系统的扰动场分布较为平均,这也是在验证区上方出现虚假的敏感区原因之一。因此本次个例中只考虑湿度场和湿度度量标准的估算方案较为理想。 7 结论与讨论
本文通过在原适应性观测敏感区估算方案中增加湿度场相关计算来对该方案进行进一步完善。构造4个不同方案利用2008年年初冰冻雨雪灾害天气过程来检验湿度场在敏感区估算方案中所起的作用。得到如下结论:
(1)通过加入湿度场的计算能够使目标时刻即为验证时刻的虚假敏感区减少,
并增大落入验证区中的信号方差大值区。
(2)对本个例而言:湿度计算的敏感区效果最优。在各个目标时刻所求取的敏感区较另外3个方案更小,并更加利于适应性观测的实施。在验证时刻和观测时刻重合时,信号方差大值区能更好地包含于验证区中,且无虚假敏感区。
虽然针对该个例通过不同方案求取到不同敏感区,但敏感区的合理性验证工作还需要进一步完善:
通过观测系统模拟(OSSE)试验对上述各方案求取敏感区进行检验,分析其目标时刻对验证区误差贡献大小。
合理优化ETKF-WET-E5方案中度量标准,使得湿度场在敏感区确认中作用体现更为明显。
选取更多个例进一步检验加入湿度场敏感区估算方案准确性。
| 陈德辉,沈学顺.2006.新一代数值预报系统GRAPES研究进展.应用气象学报,17(6):773-777 |
| 雷荔傈,谈哲敏.2008.适应性观测及其策略问题.气象科学,28(1):109-118 |
| 马旭林.2008.基于集合卡尔曼变换(ETKF)理论的适应性观测研究与应用[D].南京:南京信息工程大学,126 pp |
| 穆穆,王洪利,周菲凡.2007.条件非线性最优扰动方法在适应性观测研究中的初步应用.大气科学,31(6):1102-1112 |
| 谭晓伟.2009.CNOP新算法研究及其在目标观测中的应用检验[D].北京:中国科学院大气物理研究所,99 pp |
| 田伟红,庄世宇.2007.适应性观测与集合变换卡尔曼滤波方法介绍.热带气象学报,23(2):201-204 |
| 薛纪善, 陈德辉.2008.数值预报系统GRAPES的科学设计与应用.北京:科学出版社,383 pp |
| Baker N L, Daley R. 2000. Observation and background adjoint sensitivity in the adaptive observation-targeting problem. Quart J Roy Meteor Soc, 126: 1431-1454 |
| Bergot T, Hello G, Joly A, et al. 1999. Adaptive observations: A feasibility study.Mon Wea Rev, 127: 743-765 |
| Bishop C H, Toth Z. 1999. Ensemble transformation and adaptive observations. Atmos Sci, 56: 1748-1765 |
| Bishop C H, Etherton B J, Majumdar S J. 2001. Adaptive sampling with the ensemble transform Kalman filter Part Ⅰ: Theoretical aspects. Mon Wea Rev, 129: 420-436 |
| Bouttier F, Courtier P. 2002. Data assimilation concepts and methods. Meteor Training Course Lecture Series, ECMWF |
| Kalman R E. 1960. A new approach to linear filtering and prediction problems. J Basic Engineering, 82: 35-45 |
| Majumdar S J, Bishop C H, Etherton B J. 2002. Adaptive sampling with the ensemble transform Kalman filter Part Ⅱ: Field program implementation. Mon Wea Rev, 130:1356-1369 |
| Pu Z X, Kalnay E, Sela J, et al. 1997. Sensitivity of forecast errors to initial conditions with a quasi-inverse linear method.Mon Wea Rev, 125(10): 2479-2503 |
| Rabier F, Klinker E, Coutier P, et al. 1996. Sensitivity of forecast errors to initial conditions.Quart J Roy Meteor Soc, 122:121-150 |
| Snyder C. 1996. Summary of an informal workshop on adaptive observations and FASTEX. Bull Amer Meteor Soc, 77: 953-965 |
| Welch G, Bishop G. 2006. An introduction to the Kanlman fileter. Comput Inf Sci, 7(1): 1-16 |
| Wu C C, Lin P H, Aberson S, et al. 2005. Dropwindsonde observations for typhoon surveillance near the Taiwan region (DOTSTAR): An overview. Bull Amer Meteor Soc, 86: 787-790 |