 2020, Vol. 38
2020, Vol. 38 


截至2019年底,内蒙古电网风电装机容量已达18 720 MW,约占电网总装机容量的26.8%。风电的波动性和随机性大,随着并网规模的不断增加,给电网安全稳定运行带来的挑战也越来越大,因此开展风电机组并网性能评价显得尤为重要。
目前风电机组的并网评价主要以现场测试为主,虽然能够有效评价机组控制系统、主控系统、变桨系统、箱式变压器等设备的综合性能,但由于现场环境和设备容量的限制,这种方式在推广过程中存在评价周期长、检测难度大、对设备容量要求高等局限;另外,PSCAD等离线软件的仿真评价方法也因存在模型缺少控制参数等问题,导致结果缺乏精准性。目前,有学者提出采用控制器接入RT-LAB平台的硬件在环仿真方法,用以检测并网控制系统性能。文献[1]介绍了利用RT-LAB平台进行风电并网系统低电压过渡仿真的实例;文献[2]介绍了永磁直驱风机的硬件在环仿真模型,并从原理上对比了CPU仿真与FPGA仿真的差异;文献[3]研究了鼠笼风机变流器的硬件在环仿真平台,并进行了控制算法的开发和验证;文献[4-6]设计了直驱风电机组的硬件在环仿真模型,并开展了不同的研究和测试。上述研究验证了利用RT-LAB完成硬件在环模型仿真的可行性,但并未深入讨论模型在仿真中存在的问题以及仿真结果与实际检测结果之间的差异。
本文以双馈风电机组为例,应用RT-LAB仿真平台,开展风电机组的建模与仿真,实现双馈风电机组并网仿真特性评价;结合现场实际测试波形数据曲线,对比研究仿真模型中存在的问题和不足,为风电机组的建模仿真提供技术参考。
1 仿真平台及流程RT-LAB平台是加拿大opal-RT公司研发的一套实时仿真系统,系统内部含有多个计算核心,可开展分核并行计算,提高了仿真计算效率;同时,该系统能够将真实控制装置接入仿真系统,开展数模混合仿真运行[7]。仿真系统包含上位机、下位机、控制器3个部分,上位机为普通计算机,用于模型的搭建和操作;下位机为实时仿真器,用于模型的运行和计算;控制器为被测控制器。上位机与下位机间通过网线连接,用于模型的下载和数据的传输,控制器与下位机通过I/O板卡和传输线连接,完成数据的交互。
RT-LAB平台的建模与操作在上位机完成,通过MATLAB/Simulink软件进行模型的建立,并按照RT-LAB的规则进行定义和封装。RT-LAB需将模型分为多个系统,包括主系统SM、子系统SS、监控系统SC等。主系统和子系统为模型的计算处理部分,并分解到下位机中多核并行计算;监控系统主要用于运行过程中输入量的修改和数据监控,为非同步系统。在模型中有且仅有1个主系统,可不含有或含有多个子系统(数量由仿真规模和仿真资源决定),当资源与仿真规模不匹配时,会出现仿真溢出、超时现象,此时需要考虑进行模型的分割、解算等操作[8]。仿真流程如图 1所示。

|
图 1 仿真流程 |
双馈风电机组典型拓扑结构如图 2所示,其包含发电机、背靠背变流器、预充电路、卸荷电路等,搭建模型时完全按照实际风机的拓扑结构和技术参数进行,模型如图 3所示。仿真模型中U代表输入源,是从外界给定数据的受控源[1];Y代表采样点,各采样点需严格按照实际风电机组采样位置和方向进行设置,并将该数据按照固定的顺序传输给控制器;SW代表开关位置,对应仿真模型的接收信号位置,模型通过仿真器接口从控制器接收指令,作用于对应的开关位置,完成数据的交互和传递。

|
图 2 双馈风电机组拓扑结构 |

|
图 3 双馈风电机组模型 |
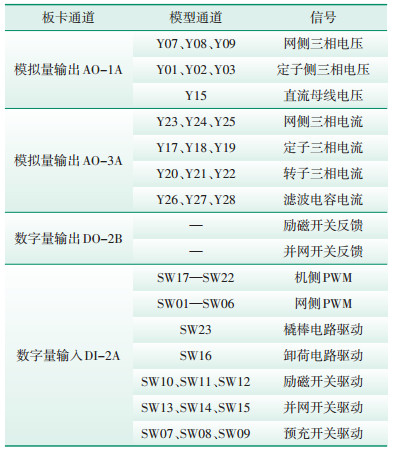
模型接口一般指仿真模型与控制器对应的数据采样及驱动位置,以双馈风电机组为例,其数据的传输信号列表如表 1所示。仿真器将采集的网侧电压、定子电压、直流母线电压、网侧电流、定子电流、转子电流、滤波电容电流等信息传输给控制器,控制器接收后,将计算所得的机、网侧PWM信号、开关驱动信号传输给仿真器,并作用于图 3所示的模型,完成整个信号采集与回路控制过程。
| 表 1 双馈风机模型交互数据 |
RT-LAB仿真器的模拟量输出能力仅为-16~ 16 V,数字量输出的能力仅为24 V,为了保证设备安全和仿真有效,在数据传输前需将控制器采样和输出调至RT-LAB可接收范围内,在RT-LAB中通过Analog Output Mapping模块进行信号调制,完成数据的增益、偏置和限幅等操作。
3 仿真与分析为验证仿真模型的正确性和有效性,选取典型工况进行仿真验证。风电机组的容量2 MW,额定电压690 V,直流母线电容0.015 F,变流器输出连接电抗280 mH,输入风速16 m/s。主电路的仿真参数为:仿真步长0.47 μs,仿真时间10 s,开关频率3 kHz,选取功率的基准值2 MW。对风电机组分别进行稳态仿真测试、低电压过渡能力测试。
3.1 稳态仿真测试双馈风机模型的稳态测试结果如图 4所示,电压、电流均在正常运行范围内,有功功率输出为1(p.u.),无功功率在0附近,表明RT-LAB的仿真模型能够正常并网运行。

|
图 4 稳态运行测试结果 |
低电压过渡能力测试以50%三相对称电压跌落为例,在风机运行后的0.4 s将电网电压跌落为50%额定电压,持续时间为1.214 s,图 5为测试的电压、电流、有功功率及无功功率测试结果。发生电压跌落时,电压迅速降低至50%额定电压,电流瞬时增大后稳定,有功功率降低至0.2(p.u.),无功功率增加至0.7(p.u.)。故障消失后,电压、电流、有功、无功瞬时恢复至初始值。由测试可知,RT-LAB仿真平台能够开展双馈风电机组故障下的仿真模拟,同时,可进行控制策略的验证和并网性能评估。

|
图 5 50%低电压过渡能力测试结果 |
为研究仿真测试与现场测试的差异,选取某双馈风电机组50%三相对称跌落现场测试曲线进行参考对比,由于电压为电网电压值,差别较小,仅以功率曲线进行分析,如图 6所示。可以看出,现场风电机组发生电压跌落时,有功功率先下降后上升、无功功率先上升后下降,与仿真曲线类似;但在功率恢复过程中,有功功率呈现固定斜率恢复,恢复时间约为5 s,这与仿真曲线相差较大。

|
图 6 现场测试有功、无功功率波形 |
综合分析仿真与现场测试曲线可以看出,相比于实际测试曲线,仿真曲线在无功功率上趋势基本一致,但有功功率恢复存在差异。现场测试由于主控系统和变桨系统的存在,有功功率将依据主控指令按照10%额定功率/s的变化率恢复至故障前功率值,同时考虑到变桨系统的桨距角变化,无法瞬时恢复至初始值,可见现场测试可综合验证其主控及变桨系统的性能。但在仿真模型中,由于模型仅为电气部分,对主控和变桨系统进行了省略,当故障消失后,风电机组立即恢复至满发状态,这与风电机组的真实特性存在差异。
4 结语本文针对风电机组现场检测存在的难题,提出了应用RT-LAB开展建模与仿真的方法,研究结果表明,应用RT-LAB仿真能够便捷、高效地开展双馈风电机组并网特性评价及其控制策略的评估工作。
| [1] |
朱谷雨, 王致杰, 邹毅军, 等. 永磁直驱风机的小步长硬件在环仿真研究[J]. 电力系统保护与控制, 2018, 46(23): 111-117. |
| [2] |
黄明明. 基于RT-LAB兆瓦级PMSG实时仿真及最大功率跟踪[J]. 电气开关, 2018, 56(4): 63-66. |
| [3] |
李元浩, 马玉鑫, 杜志超. 基于RT-LAB的风电并网系统低电压穿越仿真研究[J]. 电器与能效管理技术, 2017(6): 71-77. |
| [4] |
高程杰, 全惠敏, 毕大强. 永磁直驱风力发电系统在线实时控制仿真[J]. 计算机仿真, 2016, 33(5): 135-140. |
| [5] |
高程杰.永磁直驱风力发电HIL仿真系统的设计[D].长沙: 湖南大学, 2016. http://cdmd.cnki.com.cn/Article/CDMD-10532-1016237091.htm
|
| [6] |
何舜, 张建文, 蔡旭. 风电变流器的RT-LAB硬件在环仿真系统设计与实现[J]. 电力系统保护与控制, 2013, 41(23): 43-48. |
| [7] |
许伯强, 张舒怡. 定子故障下的双馈风力发电机组建模与稳定性分析[J]. 电力自动化设备, 2016, 36(9): 14-17. |
| [8] |
范冠男.考虑调频需求的风电场有功优化控制研究[D].北京: 华北电力大学, 2016. http://cdmd.cnki.com.cn/Article/CDMD-11412-1016270508.htm
|