引用本文 |



1 引 言
随着航天科技的高速发展,人们对地球周边环境的求知欲已变得极为迫切,大量空间新理念、新技术、新工具的应用已开始引领人类走向不同凡响的新纪元. 与此同时,世界各科技强国也竞相投入了前所未有的人力、物力、财力,采用各种先进的技术手段加快对宇宙的探索步伐. 包括轨道空间站、隐身卫星、深空望远镜在内,大量航天设备已成为认知甚至改造外部空间必不可少的工具,其中,空间电动力绳系航天器作为一类新型的航天技术,正处于蓬勃发展阶段.
空间电动力绳的概念源自20世纪七八十年代(Banks et al. 1981),多年来,诸如电流回路形成、在轨生存、工作运行等基本问题已被广大科研工作人员探索论证(Rasmussen et al. 1988,Samanta et al. 1992,Korepanov et al. 2001,Oishi et al. 2004,Kim et al. 2010),表明该技术是完全可行的. 目前,该研究课题正吸引着更多学者的密切关注,并已产生极为丰硕的研究成果(Estes et al. 2000a,Cartmell et al. 2008,Wen et al.2008,孔宪仁等2010,陈辉等2013,蔡洪等2014).
通常,电动力绳系统是由在轨航天器、末端载荷及起连接作用的导电系绳3部分组成,如图 1所示,其工作原理如图 2所示. 高速绕地运行的导电系绳切割地磁感线会产生上千伏的动生电动势(根据右手定则可判定电动势方向),此时若在系绳两端分别安装电荷采集和发射装置即可建立起电流回路,电流与地磁场相互作用便产生了Lorentz力(根据左手定则可判定其方向),即电动力(Shiah et al. 1997,文浩2009). 特别地,当Lorentz力做功时会使系统机械能耗散,从而实现系统轨道下降,即离轨; 而若使电流反向流动,电能便会转化为机械能,实现系统轨道抬升,即升轨.

|
| 图 1 电动力绳系统 |

|
| 图 2 电动力绳工作原理 |
空间电动力绳的应用是一个探索性极强的研究领域,涉及许多尚待解决的重要科学问题,即使结构形式最为简单的电动力绳系统,其动力学及控制问题也十分复杂. 由于系绳具有柔性大、阻尼小等特点,当其被置于空间环境并与航天器耦合时极易产生一系列复杂的天平动及振动,同时,电-力耦合作用也可能使系统姿态运动能量不断增加而导致系统失稳. 基于此,人们对空间电动力绳的研究主要聚焦于力学模型构建、动力学控制、在轨实践、地面模拟实验等方面.
2 理论研究 2.1 力学建模研究空间电动力绳系统时,航天器与末端载荷刚体姿态运动通常可忽略不计(Peláez et al. 2002,Zhong et al. 2013a). 而电动力绳的刚度较低,在微重力环境和磁弹性力等作用下极易发生弯曲、大变形,准确刻画此类具有无限维自由度系统的真实动力学行为成为挑战性问题.
针对电动力绳系统,科研工作者根据自身研究的特点和需要,建立了多种不同的模型,其中,最简单、最为常见的是刚性杆模型. 此模型忽略系绳柔性,将其视为一根不可拉压的刚性杆,即系绳刚度趋于无穷大,两端分别连接着在轨航天器与末端载荷,由于模型为刚性连接且外形酷似一个哑铃,所以人们又常称之为哑铃模型,如图 3所示. 譬如,Peláez等(2005a)和Zhou等(2006)在研究电动力绳系统时采用的便是哑铃模型. 此类模型结构简单,便于公式推导和数值计算,多用于电动力绳系统的稳定性、控制方法等研究.

|
| 图 3 哑铃模型 |
显然,现实中的电动力绳是会随外力变化而发生形变的,近而产生内应力,所以,学者们又引入了较哑铃模型更为接近实际电动力绳的弹性杆模型. 如图 4所示,弹性杆模型将电动力绳视为一根可轴向拉压而不会发生弯曲的直杆,其两端分别连接航天器与载荷. 此模型与哑铃模型的最大区别在于,其通过系绳刚度的取值体现了系绳弹性. 其在电动力绳系统的最优控制问题中常被采用,如文浩(2009)、刘丽丽等(2011)便采用过弹性杆模型. 由于模型简单, 故通常称哑铃模型和弹性杆模型为简单模型. 同时, 在实际研究过程中发现, 简单模型通常无法体现电动力绳柔性, 这就需要建立更为接近真实情况的系绳模型.

|
| 图 4 弹性杆模型 |
相比之下, 链杆模型则可以充分考虑系绳柔性, 该模型通常是将系绳离散为一系列由铰链连接的刚性直杆, 两端分别连接着航天器与载荷, 如图 5所示. 链杆模型的离散方式较多, 如可将系绳离散为一系列由铰链连接的有质刚性杆; 也可将其离散成由弹簧和阻尼连接的刚性杆; 还可离散成若干个有质结点, 再通过无质量刚性杆将它们连结起来等. 如Williams (2006a) 和Mantellato 等(2013) 使用的链杆模型能在不增加模型复杂度的同时进一步提高系统响应精度. 由于一根系绳被离散成为多个刚性杆,通过对这些杆的动力学分析与仿真,可以展示系绳的柔性.

|
| 图 5 链杆模型 |
珠点模型是将电动力绳离散为一系列由无质量弹簧连接的质点,两端分别与航天器、载荷相连,如图 6所示,因为这些离散质点像一粒粒钢珠,故称之为珠点模型. 显然,随离散点增多,此类模型会不断接近于真实系统. 比如Yamaigiwa等(2005)、Ellis等(2009)及余本嵩(2011)在各自研究中均采用了珠点模型. 珠点模型和链杆模型都是通过对系绳的离散得到的,故可统称为离散模型,两者区别在于珠点模型中是将系绳离散为若干个有质结点,而链杆模型则一般是将系绳离散为多个刚性杆. 与简单模型相比,离散模型可以更为精确地描述电动力绳系统,能够更加清晰、准确地模拟出系绳的构形变化情况. 但是,随离散单元数增多,模型将变得十分复杂,这大大增加了理论研究的难度,所以,离散模型多出现于电动力绳系统的动力学研究,鲜有应用于控制理论和稳定性研究.

|
| 图 6 珠点模型 |
如图 7 所示.理论上,该模型可以通过建立微分和偏微分方程组对一维连续电动力绳进行准确动力学描述,而后对方程组进行离散,再代入适当的边界条件实现对系统的动力学仿真.如Mankala等(2006)、潘冠群等(2007)皆建立过电动力绳的连续体模型.此类模型和珠点模型通常都被用于电动力绳系统瞬态响应的动力学仿真、模拟系绳的构形变化等.连续体模型是先建立系统方程后再对所建立方程进行离散,而离散模型则是先对系绳离散后建立方程,两者顺序不同.所以,连续体模型是从数学角度抽象地对系统方程进行离散,而离散模型是从物理角度直观地对系绳进行离散, 两者之间互有裨益.

|
| 图 7 连续体模型 |
考虑到导电系绳会受到太空碎片、极端温度等各种外界因素影响,人们提出了在其外部套一层保护蒙皮,此时,系绳的弯矩和扭矩就必须考虑了. 如图 8所示,在先前模型基础上考虑系绳的弯矩Mt及扭矩Tt,由于此类模型多应用于一些特殊绳索,如套有蒙皮的系绳、硬质绳索等,故在这里称之为特殊模型. 如Valverde等(2010)便是基于此模型对空间电动力绳系统的稳定性、分岔及实际应用进行了讨论. 特殊模型可以很好地对系绳抗弯、抗扭特性进行描述,但也增加了系统理论研究的难度.

|
| 图 8 特殊模型 |
表 1列出了上述6种电动力绳模型,给出了各种模型对系绳的质量、弹性、弯矩/扭矩、柔性是否予以考虑及建模过程中是否对系绳进行离散的说明,其中"√" 表示"考虑"、"×" 表示"未考虑"、"○" 表示"皆可". 显然,这些模型间有区别但也存在联系,譬如,链杆模型在离散单元数为"1" 时,便简化成了哑铃模型; 弹性杆或链杆模型计入弯矩、扭矩因素,便成为了特殊模型.
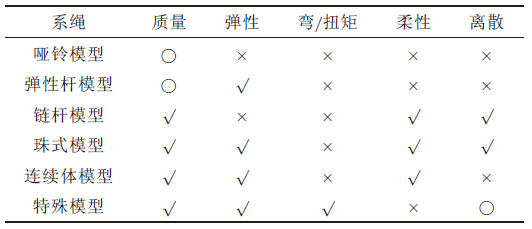 |
其中,二维电动力绳系统的简单模型通常是一个3自由度(或4自由度)系统,其控制方程简单,便于动力学、稳定性及控制理论方面的研究,但其对系绳的处理过于简单,不免会与真实系统产生一定偏差.而电动力绳的离散模型与连续体模型通过对所有系绳段进行细致描述,可以很好地反映系统真实的动力学行为.但由于模型离散后被转化成为了高维系统,方程表达式十分复杂,不便于系统的理论研究. 另外,特殊模型是针对一些特殊质地的电动力绳而建立的,对于弯矩或扭矩不可忽略的绳索,这类模型的研究有着非常重要的意义.
此外,学者们还以随时间t变化的经典轨道六参数,即以轨道半长轴a、偏心率e、轨道倾角δ、升交点赤经Ω、近地点幅角ω及平近点角M为变量,建立起大时间尺度下描述电动力绳系统缓慢变轨过程的轨道摄动方程(Zhong et al. 2013a)
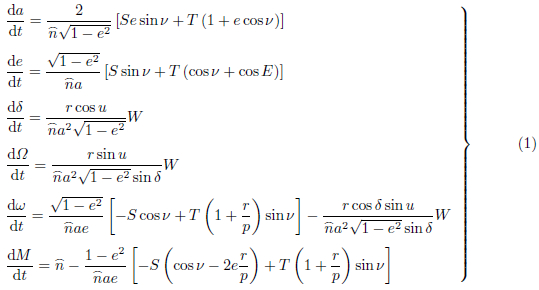
 为平均运动速度,而S,T 及W分别表示轨道径向、运动方向及轨道平面法向的摄动加速度分量.
为平均运动速度,而S,T 及W分别表示轨道径向、运动方向及轨道平面法向的摄动加速度分量.
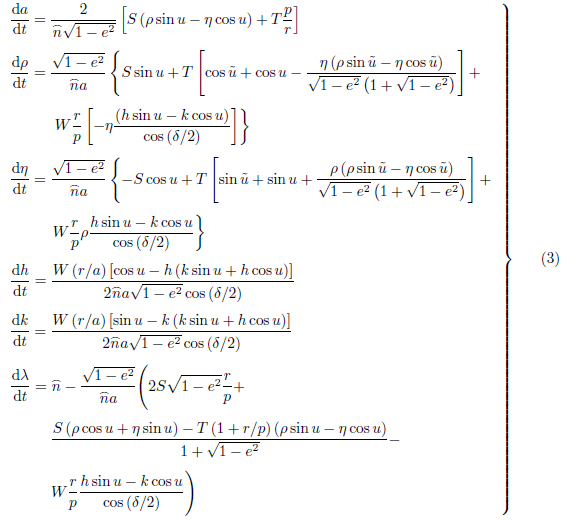
不难看出,摄动方程(1)在实际使用中存在一定局限性,即其右端含有1/e和1=sinδ因子,故不适用于轨道为e=0,δ=0°或δ= 180°等情况. 而对于航天器而言,一般不会出现δ=180°的情况,故这里只需考虑e=0和δ= 0°的问题. 为此,引进一组新的变量

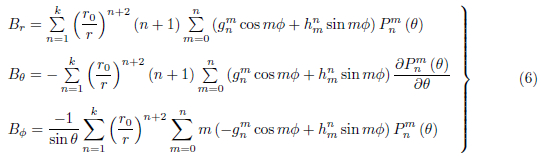
对于切割地磁感线的导电系绳,其产生的电动力可表示为(Fuhrhop et al. 2004)


 表示地心偶极子磁矩,且在地心惯性坐标系下,地轴方向单位向量
表示地心偶极子磁矩,且在地心惯性坐标系下,地轴方向单位向量 ,地心指向航天器的单位向量
,地心指向航天器的单位向量 . 而倾斜偶极子模型常采用具有13阶近似的第11代国际地磁参考场模型,相应地球磁场强度描述为(Davis 2004,Zhong et al. 2013b)
. 而倾斜偶极子模型常采用具有13阶近似的第11代国际地磁参考场模型,相应地球磁场强度描述为(Davis 2004,Zhong et al. 2013b)
值得注意的是,导电系绳通常是由绝缘蒙皮包裹,故不会与外界发生电荷交换,所以只要导电系绳两端的电荷收发装置工作状态不变,系绳中电流强度I也将保持不变,此时很容易计算出电动力. 然而,为了节约资源和提高效率,学者们提出利用裸露的导电系绳采集电荷以取代系绳终端的电荷采集装置,即电动力裸系绳技术(Sanmartín et al. 1993).
裸系绳的电荷交换原理如图 9(a)所示,其由正偏置段AB吸收负电子、负偏置段BC吸收正离子,再由电子枪或其他电子发射装置在C端将电子发射回电离层以形成电流回路. 由于系绳本身具有电荷吸收能力,因此裸系绳中的电流强度I(s)沿系绳长度方向呈非线性变化,如图 9(b)所示.

|
| 图 9 裸系绳电荷交换原理及电流强度分布 |
根据轨道运动限制理论,裸系绳的电流强度梯度可表示为(Tahara et al. 2004,Sanjurjo-Rivo et al. 2011)








空间电动力绳系统存在着极为复杂的动力学现象. 例如,Estes 等(2000b,2000c)发现电动力裸系绳在变化地磁场及电离环境下会呈现丰富的动力学行为. Sedwick 等(2002)讨论了如何通过角动量交换实现电动力绳系统的编队展开及构形变化,结果可用于稀疏孔径对地观测问题. Hoyt(2002)指出空间电动力绳自身存在大量的不稳定动力学行为,如摆绳天平动、横向波振荡、\跳绳" 振荡等. Sanmartín 等(2006a,2006b)通过优化系统质量及能源配置,利用电动力绳系助推技术以最大推重比实现近地轨道下系统的轨道变换. Zakrzhevskii 等(2007)研究了极地轨道下电动力绳的平衡状态,对系绳拉力及曲率半径、轨道倾角、电动力等参数进行了数值分析. 徐大富等(2007,2010)讨论了电动力绳系卫星展开及状态保持阶段的动力学响应,并预测了此类系统的离轨时间,研究表明估算的离轨时间精度与地磁场模型的精确度有关. Sabey 等(2008)在研究电动力绳系统的轨道机动问题时考虑天平动,从而提高了系统轨道机动解的精确性. 李然等(2008)比较不同长度的空间导电系绳及主星与子星质量比,揭示了系统面内振荡角频率及系绳构形变化的动态特证. Janeski 等(2015)基于国际参考电离层模型,用数值方法研究了局部等离子环境下电动力绳与轨道间的动耦合问题,展示了不同恒定电流下系绳面内外振荡的频谱曲线.
不难看出,由于电-力耦合、重力梯度、环境摄动等诸多因素存在,空间电动力绳系统是一类典型的非线性系统,学者们对此也进行了大量研究. 其中,Peláez 等(2000,2003,2005a)分别研究了倾斜椭圆轨道下电动力绳系统的周期运动及平衡点附近系绳的周期摆动,并采用Poincaré映射等方法研究了周期解的稳定性,同时将解析解与数值解进行了对比分析. Valverde 等(2003)将100 m长的短距电动力绳视为柔性伸展结构,在自然坐标系中采用浮动坐标法进行建模,数值得到超临界速度下系统的概周期运动,研究了系统的稳定及不稳定域. 刘丽丽(2008)利用摄动法及Floquet理论讨论了三维电动力绳系卫星的非线性动力学行为,证明了对于不同轨道倾角,系绳电流在一定范围内可使周期运动保持稳定,轨道偏心率对系统非线性动力学行为具有较大影响. Kojima 等(2009)分析了倾斜椭圆轨道下电动力绳系统的面内外周期运动及混沌运动,解析结果表明通过延迟反馈控制可以将大偏心率轨道下的混沌运动控制到稳定的周期运动上. Zanutto 等(2011)研究了经典三体问题下电动力绳系统在Lagrange点附近小幅摆动和大幅摆动的稳定性.
近些年,基于电动力绳可产生Lorentz力并通过做功使系统机械能耗散,从而实现航天器离轨也已成为备受关注的课题. 譬如,Vannaroni 等(2001)比较了普通导电裸系绳和在其正极终端添加一球形导电采集器时空间碎片的离轨动力学特性. Peláez等(2004,2006a,2006b)从理论上分析了空间碎片在电动力绳系离轨过程中,不消耗任何能源仅通过自身重力矩便可实现自平衡的问题,并给出了此平衡条件的适用范围.Tortora 等(2006)用数值方法仿真了无主动控制情况下,小型电动力绳系统的绳系释放和离轨过程,并采用闭环电流控制将系绳的天平动角控制在10°以内. Zhong 等研究了在近地轨道短距电动力裸系绳作用下,纳卫星在离轨过程中的天平动、稳定性及参数指标(2013a,2013c). Bombardelli 等(2013)针对倾斜圆轨道下电动力裸系绳的离轨能力进行了参数分析. Sánchez-Arriaga 等(2015)去除系绳横截面尺寸限定、轨道运动极限电流及电压高偏置近似等假设,研究了电动力裸系绳离轨过程的动力学响应. 翟光等(2015)关注了电动力绳面内外摆角对碎片离轨过程的影响,数值结果表明,只有考虑系绳姿态才能更为精确地计算出离轨过程中系统的各轨道参数. 作者对电动力绳的离轨特性也做过数值研究. 如图 10所示,横坐标表示轨道倾角、纵坐标表示离轨天数,从上到下分别用点画线、点线、实线、虚线、双点画线描述了1 km,5 km,10 km,15 km及20 km长系绳自300 km高的初始绕地轨道离轨到200 km高度的耗时情况. 其中,对于1 km长的系绳,由于系绳最短故产生电动力也最小,系统的离轨时间最长,而且系统轨道倾角越大离轨耗时也越多. 另外,对于5 km,10 km,15 km 及20 km 长的电动力绳,由于系绳长度逐步变长故产生电动力也随之增大,系统的离轨时间也相应变短. 不难看出,电动力绳长度及轨道倾角对系统离轨时间的影响十分显著.

|
| 图 10 图10 电动力绳系统离轨参数分析 |
空间电动力绳系统的控制问题主要集中于对系统振荡特别是如何对不稳定天平动进行抑制.诸如Watanabe 等(2004)和Kojima 等(2007,2010,2011)分别采用输入整形、模型跟踪解耦、切换时滞反馈、同步控制等方法对电动力绳系统的周期运动及混沌天平动进行了有效抑制. Peláez 等(2005b)和Iñnarrea 等(2010,2014)将相空间不稳定的周期天平动轨迹作为参考轨迹并引入阻尼力,用扩展的时滞自同步控制方法使倾斜轨道下系统天平动变为稳定. Mankala 等(2005)研究了电动力绳系统在轨道转移过程中平衡位置机动变换时,如何通过变化电流强度将系统的俯仰摆动幅值控制到最小.Williams(2006a,2006c,2009)提出采用天平动能量变化反馈和时滞反馈预测控制方法将圆周轨道下空间电动力绳系统控制到周期天平运动上,并指出该方法可推广到椭圆轨道、轨道转移及系统离轨过程中.Larsen 等(2007,2009)分别采用线性化反馈及滑膜控制将倾斜轨道下电动力绳系统的面外运动控制到一定范围; 此后他又基于Hamilton原理构造出一个Lyapunov函数,基于Floquet理论引入阻尼将系统引导到一个渐近稳定的平衡位置.文浩等(2008)基于非线性最优控制,通过调节系绳张力及电动力,使子星精确地回收到主星附近.Zhong 等(2013d,2013e,2014)先后设计出简单的开关控制、有限后退时域控制及闭环最优控制将离轨过程中的电动力绳系统面内外摆角控制到一定范围.基于Lyapunov稳定性理论,作者获得了一套圆周轨道下电动力绳稳态释放的速率控制律及稳定性条件,能使系绳以任意期望的俯仰角渐近稳定地释放(Yu et al. 2015).图 11展示了电动力绳渐近稳定地释放过程. 图 11(a)和图 11(b)分别表明释放过程中电动力绳的面内俯仰角和面外滚转角随真近点角逐步衰减; 图 11(c)为无量纲轨道坐标系下(其原点固结于航天器质点,χ轴指向系统运动的反方向,η轴由地球质心指向航天器)无量纲系绳末端载荷的释放轨迹; 图 11(d)为释放过程中无量纲绳长ξ随真近点角的变化情况. 图 12采用调节电流强度的方式,实现了系绳渐近稳定地匀速释放,其中,图 12(d)表明随着释放过程的进行,控制电流强度在逐渐变低.

|
| 图 11 电动力绳系统渐近稳定的释放过程.(a)面内俯仰角θ随真近点角ν变化情况,(b)面外滚转角Φ随真近点角ν变化情况,(c)载荷释放轨迹,(d)无量纲绳长随真近点角ν变化情况 |

|
| 图 12 电动力绳系统渐近稳定的匀速释放过程.(a)面内俯仰角θ随真近点角ν变化情况,(b)面外滚转角Φ随真近点角ν变化情况,(c)载荷释放轨迹,(d)电流随真近点角ν变化情况 |
此外,利用电动力绳进行卫星轨道机动转移也是一个较为热门的研究方向. 例如,Pearson 等(2004)研究了自旋电动力绳系推进技术,通过改变系绳电流强度以控制系绳旋转参数及系绳弯曲模式,最终实现轨道机动. Williams(2005a,2005b,2010)分别利用Pontryagin 极大值原理、时间尺度分离等方法构造出最优控制函数实现了空间电动力绳系统的轨道转移. Banerjee 等(2005)通过电流整形输入法实现电动力绳系卫星的轨道抬升. Stevens 等(2008a,2008b)讨论了大时间尺度近地轨道下电动力绳系卫星最大轨道抬升、最大轨道倾角、最短时间轨道变化等3个最优轨道机动问题,并阐述了如何采用多尺度法对这些最优问题进行求解. 潘伟等(2011)通过控制系绳电流强度,实现椭圆轨道下系统在最短时间内、抬升最大的轨道高度.
2.5 应用前景 2.5.1 碎片移除随着人类空间活动与日俱增,不可避免会在宇宙中残留大量的太空垃圾. 据科学估计,在太空中超过2 kg的太空垃圾大约有2 500片,直径超过10 cm的碎片有21 000片,超过1 cm的有300 000片,它们的相对速度通常在5~10 km/s,这必将会对人类的太空活动构成极大威胁.比如,1991年,一颗俄罗斯通信卫星"宇宙1934"与来自"宇宙926"的碎片发生碰撞; 1996年,法国"樱桃号"卫星被一块太空碎片击中;2005年,美国雷神运载火箭与中国长征火箭的碎片发生了撞击;2009年,俄罗斯报废的卫星"宇宙2251"与正常运行的美国通信卫星"铱33"相撞,以上碰撞皆造成了巨大经济损失(Pearson 2010). 所以,空间碎片清理已成为世界航天界非常关注的重大课题.有计算结果表明,仅通过碎片轨道的自然衰减使碎片离轨通常耗时极长,因此迫切需要开发低耗高效的碎片离轨、清除技术.目前主要有推力离轨、空间机器人离轨等方法,但这些方法都存在耗能大、成本高的缺点,而作为一种新型的航天技术,电动力绳系统在此方面具有极为广阔的应用前景,可利用电动力绳对太空垃圾执行碎片清理任务(Kawamoto et al. 2006,Aslanov et al. 2013).
如图 13所示,碎片移除通常可分为以下6个阶段(Ishige et al. 2004).第1阶段,通过电动力绳实现任务卫星的轨道转移,从而接近目标碎片. 第2阶段,当与目标物足够接近时,回收电动力绳并通过常规推进系统进行对接(需说明的是此时电动力绳是无法为该机动任务提供推力的). 第3阶段,完成交汇对接后,任务卫星重新释放端部附着了目标物的电动力绳,再次利用电动力绳进行轨道转移,使系统不断接近目标轨道(如寿命小于25年的近地轨道). 第4阶段,到达预期轨道后,目标碎片与任务卫星分离,电动力绳也被完全释放出来. 第5阶段,碎片与卫星分离的结果是两者轨道都发生了变化,前者的轨道下降并最终燃毁于大气层中,而任务卫星获得反向冲量使其轨道高度被重新抬升. 第6阶段,任务卫星随后可以通过电动力绳被精确地控制到需要的工作轨道上,并准备重新开始下一次碎片目标的移除任务.

|
| 图 13 空间碎片移除过程 |
此外,类似地还可以通过电动力绳完成所谓的"电动快递" 任务(Pearson et al. 2003,Pearson 2010),即通过太阳能使电动力绳产生电动推力,使处于某近地轨道的航天器在几个月内转移到其它期望的近地轨道. 而且,高纬轨道改变轨道平面的速率快于低纬轨道,但改变轨道高度的速率慢于低纬轨道.
2.5.2 航天器离轨为了从源头消除空间碎片,人们还提出未来所有发射入轨的火箭、卫星都应具备清理自身碎片的能力,在任务完成后实现快速、自动离轨,这主要是指通过电动力绳离轨技术将碎片移至低轨道大气层中燃毁. 电动力绳系统离轨效果显著,基本无需消耗推进剂,是处理低地轨道废弃航天器的有效手段( van Dijk et al. 2003,Pardini et al.2009).
目前,尚没有任何国家进行过利用电动力绳技术实现航天器离轨的在轨实践,但却有过一些类似的空间航天器离轨计划. 譬如,美国航天局于1996年6月提出的"终结者" 电动力绳离轨技术(Forward et al. 1998),该技术是利用导电系绳切割地球磁感线使系绳产生电动势及电流,进而使电动力做功而产生耗散阻尼,在其作用下低轨航天器系统的离轨能力远超过单独依靠大气阻尼实现系统离轨. 由于其利用的是被动电动力绳系阻尼,故只消耗很小的能源及控制机能,因此这是一个低能耗可行性强的离轨方法,还可进一步用于空间碎片的离轨.
又如,在2001年2月美国航天局还设计完成了一套电动力离轨与再入设备系统,主要可用于中型和小型低轨道卫星的离轨(Bruno et al. 2001). 该系统由一根4~5 km长的电动力绳及被动电子采集器构成,只要卫星质量在600~4 000 kg、轨道高度在600~2 000 km、轨道倾角在0°~65°皆可采用此系统进行离轨. 其工作主要可分为5个阶段: 第1,休眠阶段,此时其完全置于航天器内; 第2,初始化阶段,通过地面指令对电动力离轨与再入设备的各子系统及主要元件进行初始化; 第3,电动力绳释放阶段,将系绳与航天器分离直至其释放完成; 第4,控制轨道衰减阶段,由地面指令进行控制使导电系绳产生电流,系统开始离轨,同时对系统进行稳定性控制; 第5,再入阶段,此时系统到达新的绕地轨道. 另外,系统在工作运行时具有以下特点: 第1,释放机构可以保证电动力绳在低重力梯度下被动伸展; 第2,一旦受到人工影响或碎片冲击时,系绳结构及构形具有非常高的敏感度; 第3,充气式被动电子采集器可以提高系统工作效率; 第4,电动力控制可有效地限制地磁场力矩对系统动力学稳定性的影响,从而提高离轨效率.
另外,由于电动力绳细且长,其在完成离轨这样的大时间尺度任务时与空间碎片的碰撞存活问题也颇受关注(Pardini et al. 2007,Kim et al. 2010). 人们分别建立了研究系绳与碎片碰撞的单系绳、双系绳系统数学模型,研究表明,当电动力绳的直径为1mm 时,任何大于1/3 mm的空间碎片都会将系绳撞断,造成系统失效. 所以,研究电动力绳系统在离轨过程中与碎片的碰撞概率,有利于提高系绳的成功离轨概率.
2.5.3 轨道再推进在近地轨道长期运行时,大气阻力会导致诸如国际空间站等航天器减速轨道高度降低,故定期再助推以保持其轨道高度是有必要的. 而为了使国际空间站保持在指定轨道上就必须使用双组元推进剂且需要在空间对推进剂储存系统进行补给加注,此成本极高. 所以,诸如电动力绳等电推进系统被人们提出,它们可以作为推进器大大减少所需推进剂的消耗. 基于动量交换/电动力再推进原理,电动力绳能够大幅降低许多太空任务推进的成本,可以作为空间推进的基础设备(Khazanov et al. 2006). 电动力绳推进器的概念涉及较多的在轨应用并得到了学者们的广泛关注(Johnson et al. 1996,Johnson et al. 1998a,Vas et al. 2000,Robertson et al. 2005,Williams et al. 2012).
基于导电系绳与地磁场相互作用的电动推进可以通过一系列系统设计实现,图 14便是一个国际空间站的电动力绳再推进系统(Johnson et al. 1998b). 该系统利用国际空间站上的等离子接触器来释放电子,电动力绳垂直向下以产生电推力. 由于电源被串联放置于等离子接触器和系绳上端部之间,所以系绳的上端部比等离子体的电势高. 根据电学基本原理可知,国际空间站下方电离层的电子更容易到达该系绳上端的高电位. 此时,若电子与电动力裸系绳接触,则它们就会沿系绳运动并产生电流,从而为国际空间站再推进提供电推力. 该推进力大小取决于电动力绳两端的动生电动势、平均电流以及轨道速度. 一般来说,较短的电动力绳对空间站的作用较小,但过长的系绳又会对空间站的太阳帆板等悬挂设备造成影响,所以大电流、短系绳将会是最终选择.

|
| 图 14 国际空间站的电动力绳再推进系统 |
学者们还提出利用电动力绳实现航天器的行星轨道捕获与逃逸(Sanmartín et al. 2005,Sanjurjo-Rivo 2009,Sanjurjo-Rivo et al. 2014,Schadegg et al. 2015),通常可分为3个过程进行研究. 捕获过程,电动力绳系统以6 km/s的速度到达目标行星的双曲轨道后(此轨道的近地点必须在大气阻尼层中),会在适当的时间点开始目标行星的轨道捕获,任务开始后系绳中的电流将被断开,这导致系统将运行于一个细而长的椭圆轨道. 航天器只有在进入大气阻尼层后电流才会再次接通,即在近地点附近及大气阻尼层内电流是打开的,其他时刻都是关闭的,此过程将被反复进行,电动阻尼会使椭圆轨道的长半轴和偏心率不断减小,如图 15(a)所示. 当电动阻尼使系统轨道的远地点下降到快接近于大气阻尼层时,则开始下一过程. 调姿过程,系绳中的电流在近地点被关闭而在远地点打开,此时电推力超过大气阻尼. 这将使轨道的长半轴增加而偏心率减小,如图 15(b)所示,直到在大气阻尼层外形成一个近圆轨道. 逃逸过程,在近地点附近系绳电流再次被开启,这里电推力仍然是超过大气阻力的,而电流在其它地方都是关闭的. 此过程与第1阶段正好相反,半长轴将不断增加,偏心率不断接近于1,如图 15(c)所示. 当有一个最终的推力使轨道打开时,航天器将从该行星轨道逃逸.

|
| 图 15 轨道捕获与逃逸(Sanmartín et al. 2005).(a)捕获过程,(b)调姿过程,(c)逃逸过程 |
在地球周围存在着被地磁场捕获的高能粒子组成的辐射带,而只有超过一定高度时,这些高能粒子才会因碰撞而发生振动阻滞或被吸附从而使辐射带被削弱. 无数次空间活动已证明,航天器经过辐射带是存在一定风险的,因此科研工作者们提出对此高能粒子群进行人为干预以期达到辐射带修复的目的. 当这些高能粒子的密度非常小且通过太阳风和宇宙辐射提供的自然补给率也足够慢时,若能研制出一种设备将这些高能粒子散射到它们的漏逸锥面,覆盖如此大空间体积所需的能量也并不会太大.即便如此,对辐射带修复问题的研究此前也并没有取得太多进展. 假设辐射是自然扩散的,而能够影响辐射的设备至少在某个维度上得足够大,不难发现,系绳是一类可行的结构(Hoyt et al. 2005,Zeineh 2005,Sanmartín et al. 2010b).
Danilov 等(2000)最早提出采用高压静电系绳修复辐射带. 利用高压系绳可以构造出一个强电场用以将高能粒子散射到它们的漏逸锥面中,然后再将它们从辐射带中移除,其研究表明上千至百万伏的导电绳都能够在辐射带中显著地析出电子. 静电绳辐射修复系统是在低纬轨道展开若干根长系绳,系绳长度在10~100 km之间,系绳轨道偏心率也需要适当选取以保证能够扫描到需要修复辐射带所影响的轨道高度. 系绳一旦释放,重力梯度力会使系绳沿当地垂直方向成一条直线展开,方向与地磁感线正交同时与高能粒子流也基本正交. 然后修复系统对系绳进行能量注入,以使其达到与周围环境相比幅值较大的负压. 电压在系绳周围产生强电场,随着捕获的辐射高能粒子沿地磁感线盘旋并与系绳相遇,电场使高能粒子偏转从而改变其俯仰角. 由于此电场为中心力场,故粒子离开系绳电场时的动能与进入时保持一致,系绳和粒子间没有净能量转移,但粒子速度与地磁场间的夹角会发生改变. 粒子在与系绳电场相互作用时,俯仰角增加和减少的几率相同,这使一个以随机方式进入其漏逸锥面的给定粒子可能需要与系绳进行几个回合的相互作用,因此高能粒子群的耗尽是一个漫长的过程. 在漏逸锥面角下方俯仰角变小的粒子则会直接离开辐射带.
虽然系绳与相对论意义下辐射带粒子间转换的净能微乎其微,但由于在此轨道高度的电离层等离子寒冷且稀薄,故需要一定的能量来维持施加在系绳上的电压从而保证电流流通. 因为系绳上幅值较大的负压会把电离层等离子吸引到系绳上,所以为了防止这些离子中和系绳电压,系统中的每颗卫星都必须持续向静电系绳提供电子. 为此,系统会在静电系绳的反向释放一个阳极结构,此阳极通过施加正电压以收集电离层中的电子. 由于电子比离子更容易移动,故收集电子所需的电压比静电系绳端的负偏压要低得多,因此收集电子所需的能量可忽略不计. 系统的电流回路是通过系统中的等离子波实现封闭的,这与电动力绳工作原理相同. 此外,系绳电流与地磁场相互作用产生的电动力会导致系绳轨道缓慢变化,轨道抬升或下降则取决于被释放的静电绳是高于还是低于电源的位置. 这种(制动)推进力在通过受辐射带影响的高度时将有助于系统扫描.
3 实验研究 3.1 在轨实验美国航天局(NASA)、加拿大航天局(CSA)、意大利航天局(ISA)、日本航天局(ISAS)及日本宇宙航空研究开发机构(JAXA)等多个国家研究部门皆已开展过多次关于电动力绳系在轨实验的研究并取得了一定成果,具体如表 2所示.
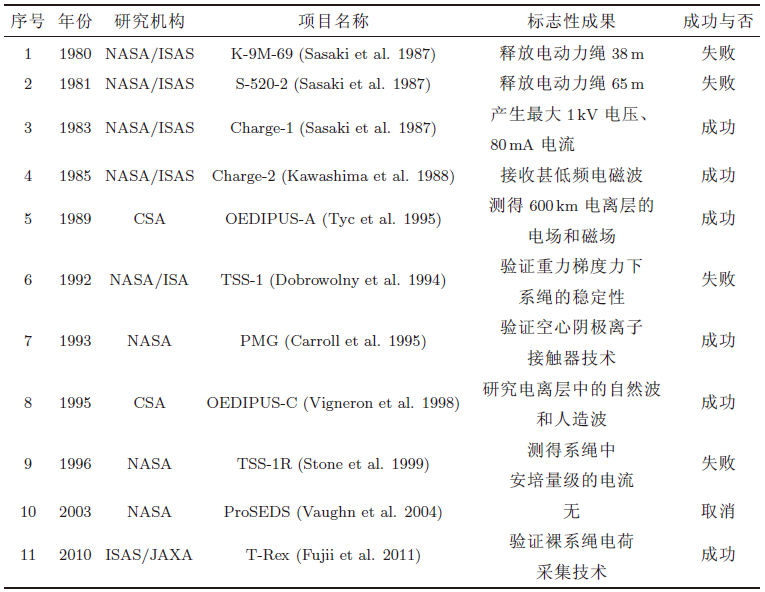 |
NASA与CSA合作在1989年1月30日、1995年11月7日分别开展了OEDIPUS-A和OEDIPUS-C任务研究(Tyc et al. 1995,Vigneron et al. 1998). 在这两次任务中,通过探空火箭释放的电动力绳长度分别为958m和1 174 m. OEDIPUS-A 任务的主要目的是对轨道高度为600km 地球大气电离层中的电场、电波、磁场及颗粒进行测量; 而OEDIPUS-C任务的主要目的则是研究电离层中的自然波和人造波.
NASA于1992年7月31日通过"Atlantis"号航天飞机释放了一颗意大利研制的电动力绳系卫星TSS-1(Dobrowolny et al. 1994). 但由于系绳控制机械装置上一个螺栓安装不当导致系绳被卡住,最终系绳仅释放了256 m,而后顺利回收. 尽管如此,系绳被卡之前的实验已进行近56小时,完成了诸如电离层低频波测量、电动力特性及无线电物理研究等12项科学实验. 此外,1996年2月22日,NASA又通过"Columbia"号航天飞机再次释放TSS-1并进行发电实验(即TSS-1R 任务)(Stone et al. 1999). 由于铜芯缆绳外表的绝缘层受到破坏,电动力绳释放至19.7km 时,缆绳与附近带电物体在绝缘层破损处发生电击穿导致系绳断裂. 虽然系绳仍没有完全展开,但TSS-1R却成功产生了安培量级的电流且测得的电流值约为已有理论预测结果的3倍,同时该任务还完成了多项测试,如测量电动势、卫星电压、系绳电流、系绳内阻变化、带电卫星周围电荷分布及电场分布等.
NASA在1993年6月26日还进行了一项短期空间等离子发电机实验,即PMG任务(Carroll et al. 1995). 该任务主要对空心阴极离子接触器技术进行了验证,评估该技术可以在航天器与电离层之间提供低阻抗双向电流的能力. 该实验持续了近7小时,在日间低轨道最大等离子密度条件下,测得外电路闭合电流达1/3A、外电压降25 V,成功验证了电流完全可逆,使系统可在发电和推进两种模式间进行切换.
另外,NASA曾计划于2003年5月开展ProSEDS 任务(Vaughn et al. 2004),准备在Delta-Ⅱ火箭的第二阶段任务中展开一段5 km长的导电裸系绳(其上还拼接了一段10 km长的非导电系绳),期望验证在电动力作用下系统在数天内的离轨高度能达到数月自由离轨(仅利用空气阻力实现)的效果. 该任务另一目标是通过系绳动生电流为系统提供一定限度的电能,其计划采用的空心阴极电荷接触器量级为10A. 所有的硬件设备皆已准备好,但该计划最终由于2003年2月"Columbia"号航天飞机失事而被迫取消.
日本的ISAS和JAXA于2010年8月31日,通过探空火箭S520-25开展了T-Rex任务,即电动力"裸系绳" 展开实验(Fujii et al. 2011). 该任务在探空火箭端安装有弹射装置以提供分离初速度,在卫星端安装有系绳释放机构. 在发射55 s后火箭前锥体脱落,等离子体验证在释放第58 s后开始测量; 卫星于120 s后通过3个弹簧从探空火箭弹射出,这3个弹簧之前被压紧并通过钢丝约束固定在3个挂钩上,目的是维持沿轴向100 g 的最大载荷. 弹射瞬间,通过钢丝切割机接收来自火箭的信号切断钢丝,卫星以3 m/s的速率弹射离开探空火箭并释放系绳. 总长300 m的带状电动力裸系绳被释放了132.6 m,释放过程的录像通过遥测仪被传输到地面基站. 火箭发射283 s 后到达最大高度309 km随后坠向大海. 该实验的主要任务包括带状系绳释放展开、验证空心阴极离子接触器快速启动技术、裸电动力绳演示及轨道限制电荷交换理论验证等.
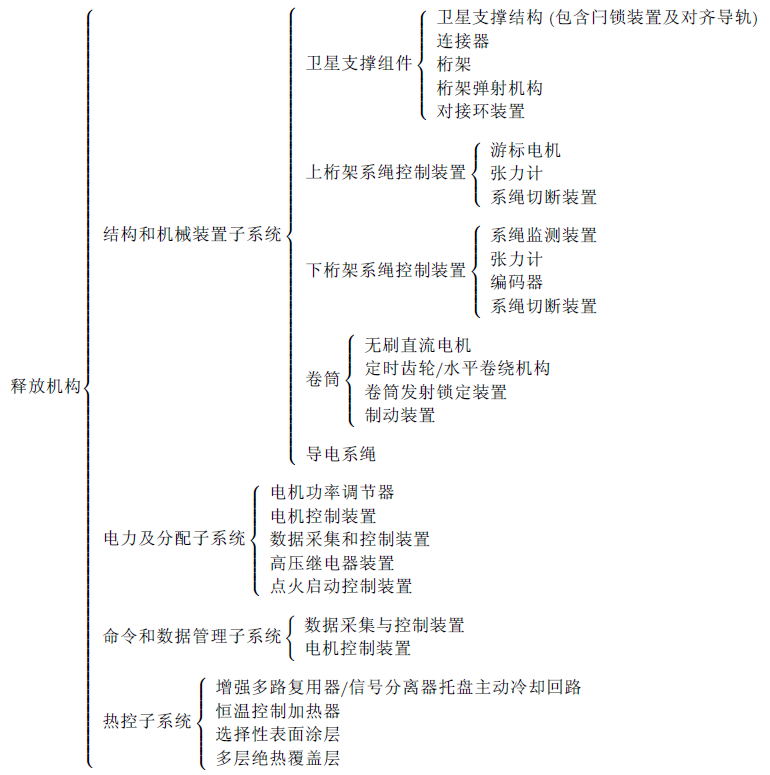
3.1.2 释放机构由于TSS-1R与原TSS-1任务的释放机构极为相似,只是在先前任务做了少许改进,这里不妨介绍较为有代表性的TSS-1任务. 其释放机构首先被安装在空间实验室的增强多路复用器/信号分离器托盘上,然后再被安放在人造卫星货舱里,如图 16所示. 释放机构主要是由4个子系统组成,即结构和机械装置系统、电力及分配系统、命令和数据管理系统、以及热控系统,它们可分别对整个任务进行测试、释放、控制及回收(Marshall et al. 1995).

|
| 图 16 TSS-1任务的绳系释放机构及实验舱外形(Dobrowolny et al. 1994) |
结构和机械装置子系统包括卫星支撑组件、上/下桁架系绳控制装置、卷筒及导电系绳. 这里,起支撑作用的卫星支撑组件由卫星支撑结构(包括安装在结构外表面的闩锁装置、对齐导轨)、两个连接器、桁架、桁架弹射机构以及对接环装置构成. 下桁架系绳控制装置位于靠近卫星支撑结构基底的位置,由系绳监测装置、张力计和编码器组成,在此装置的外侧安装有系绳切断装置,用于在紧急情况下切断靠近桁架基底的系绳. 而上桁架系绳控制装置的主要部件包括: 游标电机、张力计及系绳切断装置等. 卷筒是整个释放机构中一个非常重要的部件,由一台5马力无刷直流电机驱动,可容纳为TSS-1任务配备的22 km长的导电系绳,同时,采用定时齿轮/水平卷绕机构可使卷筒内的系绳均匀分布. 卷筒发射锁定装置可以防止卷筒在发射时发生旋转及可能的系绳缠绕. 当接到机组人员命令时,制动装置会对卷筒实施制动; 或当系绳释放速率超过预设值时,卷筒也会自动停止.
电力及分配子系统具备为释放机构构件及卫星进行预释放测试提供电力调节与分配的功能. 该子系统有电机功率调节器、电机控制、数据采集和控制、高压继电器以及点火启动控制5套装置组成. 其中,电机功率调节器能够调节轨道卫星的功率,不仅可以为驱动卷筒电机提供26 V的不间断电压,还可以为卫星的预释放测试提供33 V的稳定电压,这为卫星释放结束后进行的其它操作存储了电能. 电机控制装置为卷筒电机提供了三相脉冲宽度可调的电源,同时还为释放机构的机械装置和加热器分配了电力. 卷筒电机具有两种工作模式,即电机模式和发电机模式,工作模式转换则是由电机控制装置中的电路完成. 同时,在TSS-1和TSS-1R 任务中电机电流都是被电机控制装置限制在6 A以内. 数据采集和控制装置是对释放机构进行指令和遥测处理的重要部件,其主要任务是执行预先存储的任务信息,通过计算脉冲宽度调制电压并将其作用于卷筒电机,再使用适当的控制律对系绳进行释放/收回; 该装置还可接收来自增量编码器的输入信号以确定已释放系绳的长度及速率; 在预释放测试时,其通过两个连接器对卫星发出不连续的指令并采集相应的卫星监测数据; 在测试操作时,其可以接收卫星遥测数据并将之发送至卫星数据复用器; 此外,该装置还可提供机载显示所必须的卫星遥测数据并将其传输至地面. 高压继电器装置可以为电机功率调节器和电机控制装置/卷筒电机间提供电源隔离,并防止卷筒电机的无意供电. 而两个点火启动控制装置可以为初始系绳切断及桁架弹射操作提供分离和冗余电源.
命令和数据管理子系统进行指令及数据处理,是通过数据采集与控制和电机控制两套装置实现的. 作为飞行甲板尾部及地面开始指令的响应,数据采集与控制装置软件处理连续的命令程序从而实现释放机构功能并执行已存储的系绳释放/回收控制律. 而电机控制装置可以从轨道卫星和数据采集与控制装置处接收命令,并具有监测释放机构模拟参数的能力.
热控制子系统主要用于调节释放机构设备和结构的温度,使之保持在需求的温度范围内. 其具体是利用增强多路复用器/信号分离器托盘主动冷却回路、恒温控制加热器、选择性表面涂层和多层绝热覆盖层来调节热环境的. 同时,在卫星支撑结构中的专用加热器还可为星载陀螺仪维持一个合适的温度. TSS-1任务释放机构的子系统具体构成如表 3所示.
 |
此外,该释放机构采用的是闭环控制策略,通过调节卷筒电机电压的脉冲宽度控制系绳的长度及释放速率. 具体流程是,首先在下桁架系绳控制装置中安装一个光电轴角编码器,数据采集与控制装置可从此编码器中读取数字脉冲,并将这些信息转换为实际的系绳长度和释放速率参数. 将实际值与预存储在数据采集与控制装置中转化为期望系绳长度及释放速率的形变量进行比较,然后,根据两者误差形成脉冲宽度指令,这些命令将通过电机控制装置被传回,最终到达卷筒电机. 在卫星释放时,卷筒电机产生阻力以控制系绳释放; 在回收时,其又根据数据采集与控制装置的软件控制律以一定速率拉回系绳.
OEDIPUS-C任务采用的是一种典型的"卷绕式"系绳释放机构,如图 17所示,其由卷筒、制动器及存储的系绳组成(Vigneron et al. 1998). 在运行阶段,电动力绳通过有效载荷分离弹簧和推进器产生了初始拉力,随后被拉出卷筒. 特别地,在初始释放阶段,系绳张力包括两部分,其中推进器提供了54 %的张力、制动器提供了46 %的张力.同时,由于在系绳释放前,系统会预先记录系绳缠绕的半径、长度与线轴转角间的关系,并基于此在计算机中建立起关于缠绕半径和长度的函数以描述系绳的释放过程.若系绳拉力引起的力矩大于预设阈值时,制动器便会产生一个常制动扭矩与之对抗,而当系绳拉力矩小于此常制动转矩时,则制动器将停止转动并保持其角位置,所以制动器可以保证释放机构不倒转且不回收已释放出的系绳. 此外,OEDIPUS-C任务能够根据光电编码器在线测量数据并计算得到系绳的释放速率,当速率达到7 m/s时,则关闭推进器; 当系绳释放速率变为0时,也标志着释放过程结束.

|
| 图 17 OEDIPUS-C任务的绳系释放机构(Vigneron et al. 1998) |
T-Rex任务是对一条"带状"电动力裸系绳进行释放,由于裸系绳具有很多未知的动力学特性,故采用的是折叠存储,带状电动力绳被折叠存放在储存箱中的状态如图 18所示. 折叠式带状系绳释放机构是基于逆向折纸方法的概念设计出的,与常见的卷绕式系绳释放机构完全不同,这种新型的系绳存储方式能够提供可靠快速的释放功能,更为重要的是其能满足T-Rex任务需求(Fujii et al. 2011). 系绳释放时会由安装在箱中的3个光学发生器经过3个发射感受器,通过计算折痕数目可得到释放系绳的长度. 折痕计算的主要任务由3组计数器完成,且如果超过两组计数器的计算结果相同,则允许0.6 m计数一次. 系绳长度的辅助测量是通过感应和计算在每百个折痕间褶皱的数目实现的,并且可以感应到每隔25m 标记着的不同颜色. 初始释放速度由被安装在附带长行程导轴弹射器的加载弹簧的动能给出. 释放序列则是根据带状系绳韧性度、结构载荷约束等系统约束设计出的. 当初始速度被施加给末端卫星后其便开始释放带状系绳. 为了产生最佳的制动力,其通过刹车片摩擦力实现制动,卫星在释放的末阶段将由制动器逐步减速停止而避免反弹.

|
| 图 18 T-Rex任务的绳系释放机构(Fujii et al. 2011) |
另外,为了证实T-Rex任务电动力绳在释放过程过程中弹簧弹射机构的高可靠性及高稳定性,有11个论证方案被应用于T-Rex任务的预备阶段,包括:(1)在平整空气台上;(2)在塔形系统上;(3)在真空室内;(4)采用PET瓶模型火箭;(5)在线性电机汽车上;(6)采用购物车模型;(7)在旋转飞行测试台上;(8)在抛物飞行的微重力下;(9)垂直弹射测试;(10)水平取出测试;(11)数值仿真. 在各种不同的仿真环境下,所有实验皆已证实了此释放机构的高可靠性.
3.1.3 电动力绳结构电动力绳材质作为一项关键技术,在各次实验中也各具有特点. 如OEDIPUS和PMG任务中的电动力系绳均为带Teflon 绝缘层的铜线(Cosmo et al. 1997). TSS-1和TSS-1R任务中采用的系绳直径2.54 mm,具有5层结构,如图 19所示,内芯为高熔点芳香族聚酰胺; 第2层是依据美国线规以螺旋形式紧紧缠绕的10股铜线; 第3层是由FEP 热缩管组成的绝缘材料; 第4层是芳纶纤维强度构件; 第5层是高熔点芳香族聚酰胺编织网(Stone 1996). ProSEDS 任务的系绳是由长5 km的半裸导电系绳与10km的非导电Dyneema系绳拼接而成(Vaughn et al. 2004). 而T-Rex任务中的"裸系绳"为宽25 mm、厚0.05 mm的铝带,为了避免与探空火箭发生电接触,电动力绳根部15m是绝缘的,释放前以Z字型叠放于释放机构中,如图 18所示(Fujii et al. 2011). 此外,针对复杂的空间环境,Bonometti 等(2006)提到了具有耐久性、抗切割风险的高分子导电纤维系绳.

|
| 图 19 TSS-1和TSS-1R任务的电动力绳结构(Stone 1996) |
近年来,学者们已陆续开展了部分关于空间电动力绳系统的原理性实验验证. 如Choinière(2004)在实验室利用裸系绳带实现了电子采集,同时其用等离子流产生的电流强于轨道运动极限理论预测的结果. Okawa 等(2007)分别采用碳纳米管和栅电极发射、提取电子以形成电流,研制了一套碳纳米管场发射阴极设备用于实验研究电动力绳系推进. Fuhrhop(2007)基于电动力裸系绳实验研究了如何形成电流回路的电子采集发射技术,实验模拟了电动力绳轨道推进及推进条件. Iki 等(2012,2014)设计了系绳卷绕机构及制动装置同时选取合适的裸系绳,从地面实验和数值仿真两方面研究如何利用助推装置从卷轴机构中将电动力绳释放出来. Bell 等(2013)在地面实验平台上模拟了空间环境下电动力绳系纳卫星的轨道转移能力及动力学行为. McTernan 等(2013)在实验室中模拟了近地球轨道的空间环境,研究了电离环境下缩比航天器-绳系统的电效应.
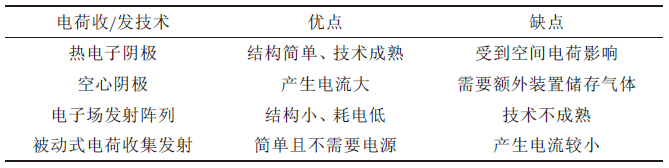
由前人的历次实验可以看出,在地面电动力绳系统的实验研究中,最关键的技术是如何通过电荷收/发装置实现导电绳与空间离子环境的电荷交换(Agüero et al.2000),其中电荷收集、发射效率与诸多因素有关,如系统本身与周围环境的电势差,以及导体的几何尺寸、形状,轨道参数等等. 根据这些因素的不同,人们开发了多种电动力绳系统的电荷收集和发射技术.依据电荷收集/发射过程是否需要消耗系统自身所储存的能量,可将所有技术分为两类,即主动收集发射技术和被动收集发射技术.
主动收集发射技术需要消耗系统自身储存的能量. 最常用的主动收集发射技术有3种,即热电子阴极、空心阴极技术和电子场发射阵列.
热电子阴极技术主要是利用加热金属或者金属氧化物表面会发射电子这一特性.一般情况下,热电子阴极发射的电流密度将随温度的升高而急剧变大. 一旦电子从受热金属表面射出,它们需要一定的能量才能穿过等离子壳层,人们通常使用电子枪使电子获得这一能量,此过程中电子枪所要施加的电压是可以利用公式计算出来的(Dobrowolny et al. 1994). 通常,热电子阴极发射电子主要受两种因素的影响,即空间电荷限制与温度限制. 在空间电荷限制范围内,从阴极射出的电子没有完全被电子枪加速到可以穿过等离子壳层,此时随着电子枪加速电压的增大,其射出的电流也不断增大.而在温度限制范围内,认为从阴极射出的电子全部被电子枪加速到可以穿过等离子壳层,此时热电子阴极射出的电流大小完全取决于其温度,温度升高则电流变大.
空心阴极技术的原理是首先让气体(可以选择氙气)通过电场,在电场作用下使气体离子化,然后将离子化的气体喷出,而实际上,被离子化的气体是一种高密度等离子体,它会与周围空间环境中已经存在的低密度等离子体发生作用,形成一种"双鞘",在双鞘的作用下,电子被从阴极中发射出,带正电荷的离子被吸入,从而达到了阴极的效果(Andrews et al. 1971,Katz et al. 2003),如图 20所示. 值得注意的是,空心阴极射出的电流大小与许多因素有关,包括保持器的大小、气体流量、外加电压大小等. 但是,该技术也有不足之处,即需要额外加装一个容器以储存气体.

|
| 图 20 空心阴极技术原理 |
电子场发射阵列技术是通过直接在分布式发射器上施加电压来达到发射电子的目的. 该技术具有结构简单、体积小、功耗小等优点,并且不需要配备压缩气体容器等附件(Ohkawa et al. 2011). 电子场发射阵列的使用条件较为苛刻,因为若要达到在低外加电压下仍具有稳定的电流发射能力,要求用来制作发射电子的分布式发射器的材料具有高纯度且尽量避免制备污染,尤其是不能掺有碳氢化合物或其它大分子聚合物(Morris 2005).
另一方面,被动收集发射技术则无需电源,不会消耗系统自身储存的能量,目前该技术主要有两种,即裸导体系绳收集发射技术和终端收集技术.
首先,任何暴露在空间离子环境中的导体理论上都可以向周围离子环境发射或收集电荷,但由于空间电离环境中电子的密度很小,因此需要有很大的接触面积才能产生足够的电流. 其次,在研究空间电荷收集发射技术时,需特别关注德拜屏蔽效应,即空间等离子体会阻碍电场的建立,而且在普通的空间电磁环境下,德拜半径是可以被估算出的(Sanmartín et al. 1993). 研究表明,当圆柱形导体的半径小于德拜半径时,其电荷收集效率较高; 而当裸系绳有效半径超过此阈值时,其电荷收集效率将会下降,Sanmartín 等(1993)最早提出了具有实用价值的裸系绳电荷收集发射方案. 因此,利用裸导体系绳进行电荷收集发射时应尽可能的细而长,使其半径小于德拜半径,从而克服德拜屏蔽效应,提高电荷收集效率. 需指出的是,裸系绳收集发射技术优点在于其简化了接触器设计的同时提高了电荷交换效率.
终端收集技术指的是,当电动力绳系统在轨运行时,电流与磁场相互作用产生的Lorentz 力会使系绳变得不稳定,需要一个终端保持系统稳定,该终端除了能使系统维持稳定,同时还作为一种被动式电荷收集发射装置使用(Stone et al. 2001). 通常,设计终端需考虑两项指标,即质量面积比和动态阻力. 一般情况下,要求终端质量尽量小,但不能低于维持系统稳定的最低要求; 同时,期望终端有尽可能大的表面积,可以收集发射足够多的电荷,产生足够大的电流. 所以,要求终端的质量面积比越小越好.表 4将以上各种电荷收发技术进行了简单比较.
 |
在我国,对空间环境下导电系绳电荷主动交换技术的物理实验尚处于起步阶段,故对此深入研究将有助于验证先前诸多理论研究的正确性,还可以进一步为我国未来的电动力绳在轨实践积累宝贵经验. 同时,对于更为热门的裸系绳电子采集技术即使在国际上也仍处于实验室研究的初步尝试阶段,远未达到技术成熟水平.
因此,本课题组也正在开展关于空间环境作用下电动力绳系统的地面仿真实验.在已搭建的三维运动及控制气浮模拟平台基础上,如图 21所示,作者又设计了一套电荷交换系统以开展空间电动力绳实验. 如图 22所示,利用压力调节器调节氙气流输出气压,电磁阀控制氙气流的开关,流量调节器调节氙气输出到阴极管的气流量. 其中阴极管、流量调节器、电磁阀、压力调节器的控制和供电均由控制器完成,在外界环境达到工作条件时,控制器分别控制这些装置开始工作. 当空心阴极管达到工作温度后,激活阴极管发射电子流,同时利用保持器接收电子流,再通过施加的外部电压,使导电系绳与空心阴极发射管形成电流回路,从而实现电荷主动交换的目的. 而若期望实现电荷的被动交换,理论上只须将一端连接航天器仿真器、一端连接电子枪的裸系绳置于电子流中进行采集电子,这同样也能够形成电流回路.

|
| 图 21 三维运动及控制气浮模拟平台 |

|
| 图 22 电荷交换系统示意图 |
此外,场空间环境可以通过以下方法实现: 利用热真空罐实现地面真空环境及热力场,通过空心阴极发射管发射出电子流制造出电离环境,由3个方向正交的亥姆霍兹线圈构造出三维地磁场,基于气浮实验装置实现微重力场.
4 展望空间电动力绳系统是一个探索性极强的研究领域,由于系统具有电-力耦合、强非线性、大变形等特点,导致当前研究多局限于简化模型、近似方法、数值算例等方面,与真实空间环境存在较大差异. 基于上述研究进展总结,可以看出今后值得重点关注的一些问题: 一是电动力绳系统属于多物理场耦合系统,电-力耦合、时变参数、轨道-姿态、环境摄动等使系统具有高度非线性和复杂性,需要深入揭示电动力绳系统的非线性动力学行为; 二是电动力绳系统属于连续体动力学与边界约束等组成的高维动力学系统,在欠驱动条件下如何设计具有工程应用价值的运动稳定性与控制策略具有挑战性; 三是亟需加强空间电动力绳系统的完备地面实验研究,尤其对"裸系绳"电子采集技术的实验研究尚不成熟. 不难看出,空间电动力绳系统的研究主要涉及到非线性理论、电磁学、多体动力学、轨道力学、物理实验等多个学科,故在研究过程中必将综合应用到多专业的交叉知识,不过这些学科都已建立起了成熟的理论基础,只要处理得当是不存在重大理论性困难的,关键在于如何合理地将这些基础理论延拓到相应的科学问题中.
空间电动力绳系统现已成为国内外航天领域研究的热门科学问题,对其深入探索是趋势使然、极为重要,关系到我国航天强国地位的未来走向. 因此,积极开展电动力绳系统的建模、动力学、控制、地面实验等研究,必将对我国今后电动力绳技术的在轨实践及应用有着战略性指导意义.
致 谢 国家自然科学基金(11202094,11290153)、机械结构力学及控制国家重点实验室自主课题(0113Y01)及江苏高校优势学科建设工程资助项目.| 蔡洪, 杨育伟, 郭才发. 2014. 电动力绳系研究进展. 宇航学报, 35:1223-1232(Cai H, Yang Y W, Guo C F. 2014. Review of electrodynamic tether system. Journal of Astronautics, 35:1223-1232). |
| 陈辉, 文浩, 金栋平, 胡海岩. 2013. 绳系卫星在轨试验及地面物理仿真进展. 力学进展, 43:174-184(Chen H, Wen H, Jin D P, Hu H Y. 2013. Experimental studies on tethered satellite systems. Advances in Mechanics, 43:174-184). |
| 孔宪仁, 徐大富. 2010. 空间绳系研究综述. 航天器环境工程, 27:775-783(Kong X R, Xu D F. 2010.The studied of space tether. Spacecraft Environment Engineering, 27:775-783). |
| 李然, 许滨, 张珩. 2008. 空间电动绳系推进中导电系绳动态特性分析. 振动与冲击, 27:36-40, 185, 186(Li R, Xu B, Zhang H. 2008. Dynamic feature analysis of space electrodynamic tether systems. Journal of Vibration and Shock, 27:36-40, 185, 186). |
| 刘丽丽. 2008. 绳系卫星动力学分析与控制的若干研究.[博士论文]. 南京:南京航空航天大学(Liu L L. 2008. Studies on dynamic analysis and control of tethered satellite systems.[PhD Thesis]. Nanjing:Nanjing University of Aeronautics and Astronautics). |
| 刘丽丽, 文浩, 金栋平, 胡海岩. 2011. 三维电动力绳系子卫星轨道转移的最优控制. 计算力学学报, 28:178-182(Liu L L, Wen H, Jin D P, Hu H Y. 2011. Three-dimensional optimal control of orbit transfer for an electrodynamic tethered subsatellite. Chinese Journal of Computational Mechanics, 28:178-182). |
| 潘冠群, 许滨, 张珩. 2007. 空间电动绳系推进的动力学建模与分析. 力学与实践, 29:17-22(Pan G Q, Xu B, Zhang H. 2007. Modelling and motion analysis of space electrodynamic tethered systems.Mechanics in Engineering, 29:17-22). |
| 潘伟, 路长厚, 李吉栋, 孔令敏. 2011. 基于傅里叶展开的电动力绳系卫星最优控制. 航空学报, 32:1714-1721(Pan W, Lu C H, Li J D, Kong L M. 2011. Optimal control of electrodynamic tethered satellites based on fourier series expansion. Acta Aeronautica et Astronautica Sinica, 32:1714-1721). |
| 文浩. 2009. 绳系卫星释放和回收的动力学控制.[博士论文]. 南京:南京航空航天大学(Wen H. 2009.Dynamic control for deployment and retrieval of tethered satellite systems.[PhD Thesis]. Nanjing:Nanjing University of Aeronautics and Astronautics). |
| 文浩, 金栋平, 胡海岩. 2008. 倾斜轨道电动力绳系卫星回收控制. 力学学报, 40:375-380(Wen H, Jin D P, Hu H Y. 2008. Retrieval control of an electro-dynamic tethered satellite in an inclined orbit. Chinese Journal of Theoretical and Applied Mechanics, 40:375-380). |
| 徐大富. 2010. 电动力绳系离轨系统的建模与动力学分析.[博士论文]. 哈尔滨:哈尔滨工业大学(Xu D F. 2010. Modeling and dynamic analysis of electrodynamic tether deorbiting system.[PhD Thesis]. Harbin:Harbin Institute of Technology). |
| 徐大富, 孔宪仁, 刘文佳, 罗文波. 2007. 基于电动力缆绳的卫星离轨时间预测. 吉林大学学报(工学版), 37:1476-1480(Xu D F, Kong X R, Liu W J, Luo W B. 2007. Application of electro-dynamic tether for deorbiting and deorbit time forecast. Journal of Jilin University(Engineering and Technology Edition), 37:1476-1480). |
| 余本嵩. 2011. 复杂太空环境下柔性绳系卫星动力学与控制.[博士论文]. 南京:南京航空航天大学(Yu B S. 2011. Dynamic and control of flexible tethered satellite in complex space environment.[PhD Thesis]. Nanjing:Nanjing University of Aeronautics and Astronautics). |
| 翟光, 苏飞, 张景瑞, 张尧. 2015. 考虑面内外摆角对电动绳系离轨过程的参数影响分析. 系统工程与电子技术, 37:1837-1843(Zhai G, Su F, Zhang J R, Zhang Y. 2015. Analysis of libration impact on the deorbit mission of space electro-dynamic tether. Systems Engineering and Electronics, 37:1837-1843). |
| Agüero V M, Gilchrist B E, Williams S D, Burke W J, Krause L, Gentile L C. 2000. Current collection model characterizing shuttle charging during the tethered satellite system missions. Journal of Spacecraft and Rockets, 37:212-217. |
| Andrews J G, Allen J E. 1971. Theory of a double sheath between two plasmas. Proceedings of the Royal Society of London, 320:459-472. |
| Aslanov V, Yudintsev V. 2013. Dynamics of large space debris removal using tethered space tug. Acta Astronautica, 91:149-156. |
| Banerjee A, Singhose W, Blackburn D. 2005. Orbit boosting of an electrodynamic tethered satellite with input-shaped current. In:Proceedings of AAS/AIAA Astrodynamics Specialist Conference, Lake Tahoe, USA. |
| Banks P M, Williamson P R, Oyama K I. 1981. Electrical behavior of a shuttle electrodynamic tether system(SETS). Planetary and Space Science, 29:139-147. |
| Bell I C, Hagen K A, Singh V, McCarty S L, Cutler J W, Gilchrist B E, McTernan J K, Bilen S G. 2013. Investigating miniature electrodynamic tethers and interaction with the low earth orbit plasma. In:Proceedings of AIAA Space 2013 Conference and Exposition, San Diego, USA. |
| Bilitza D, Reinisch B W. 2008. International Reference Ionosphere 2007:Improvements and new parameters.Advances in Space Research, 42:599-609. |
| Bombardelli C. 2012. Power density of a bare electrodynamic tether generator. Journal of Propulsion and Power, 28:664-668. |
| Bombardelli C, Zanutto D, Lorenzini E C. 2013. Deorbiting performance of bare electrodynamic tethers in inclined orbits. Journal of Guidance, Control, and Dynamics, 36:1550-1555. |
| Bonometti J A, Sorensen K F, Dankanich J W, Frame K L. 2006. 2006 Status of the momentum exchange electrodynamic re-boost(MXER) tether development. In:Proceedings of 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Sacramento, USA. |
| Bruno C, Bussolino L, Iess L, Licata R, Schirone L. 2001. EDOARD:a tether device for efficient electrody-namic de-orbiting of LEO spacecraft. In:Proceedings of Space Technology and Applications International Forum, Albuquerque, USA. |
| Carroll J A, Oldson J C. 1995. Tethers for small satellite applications. In:Proceedings of AIAA/USU Small Satellite Conference, Logan, USA. |
| Cartmell M P, McKenzie D J. 2008. A review of space tether research. Progress in Aerospace Sciences, 44:1-21. |
| Choinière É. 2004. Theory and experimental evaluation of a consistent steady-state kinetic model for two-dimensional conductive structures in ionospheric plasmas with application to bare electrodynamic tethers in space.[PhD Thesis]. Michigan:University of Michigan. |
| CosmoML, Lorenzini E C. 1997. Tethers in space handbook(3rd ed). Washington DC:National Aeronautics and Space Administration. |
| Danilov V V, Elgin B A, Grafodatsky O S, Mirnov V V. 2000. High-voltage satellite tethers for active experiments in space. In:Proceedings of 6th Spacecraft Charging Technology Conference, Huntsville, USA. |
| Davis J. 2004. Mathematical modeling of Earth's magnetic field.[Technical Note]. Blacksburg:Virginia Polytechnic Institute and State University. |
| Dobrowolny M, Stone N H. 1994. A technical overview of TSS-1:the first tethered-satellite system mission.Il Nuovo Cimento, 17C:1-12. |
| Ellis J R, Hall C D. 2009. Model development and code verification for simulation of electrodynamic tether system. Journal of Guidance, Control, and Dynamics, 32:1713-1722. |
| Estes R D, Lorenzini E C, Santangelo A. 2000a. An overview of electrodynamic tethers. In:Proceedings of 38th Aerospace Sciences Meeting and Exhibit, Reno, USA. |
| Estes R D, Lorenzini E C, Sanmartín J R, Peláez J, Martínez-Sánchez M, Johnson C L, Vas I E. 2000b.Bare tethers for electrodynamic spacecraft propulsion. Journal of Spacecraft and Rockets, 37:205-211. |
| Estes R D, Sanmartín J R, Martínez-Sánchez M. 2000c. Performance of bare-tether systems under varying magnetic and plasma conditions. Journal of Spacecraft and Rockets, 37:197-204. |
| Forward R L, Hoyt R P, Uphoff C. 1998. Application of the terminator tetherTM electrodynamic drag technology to the deorbit of constellation spacecraft. In:Proceedings of 34th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Cleveland, USA. |
| Fuhrhop K R P. 2007. Theory and experimental evaluation of electrodynamic tether systems and related technologies.[PhD Thesis]. Michigan:University of Michigan. |
| Fuhrhop K R P, West B, Choinière É. 2004. Current collection to electrodynamic-tether systems in space.In:Proceedings of 2nd International Energy Conversion Engineering Conference, Providence, USA. |
| Fujii H A, Watanabe T, Sahara H, Kojima H, Takehara S, Yamagiwa Y, Sasaki S, Abe T, Tanaka K, Oyama K, Johnson L, Khazanov V, Sanmartin J R, Charro M, Kruijff M, van der Heide E J, Rubin B, Garcia de Quiros F J, Trivailo P M, Williams P. 2011. Space demonstration of bare electrodynamic tape-tether technology on the sounding rocket S520-25. In:Proceedings of AIAA Guidance, Navigation, and Control Conference, Portland, USA. |
| Hoyt R P. 2002. Stabilization of electrodynamic tethers. In:Proceedings of 38th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Indianapolis, USA. |
| Hoyt R P, Minor B M. 2005. Remediation of radiation belts using electrostatic tether structures. In:Proceedings of Aerospace Conference, Piscataway, USA. |
| Iki K, Kawamoto S, Morino Y. 2012. Numerical simulations of an electrodynamic tether deployment from a spool-type using thrusters. In:Proceedings of 1st International Academy of Astronautics Conference, San Diego, USA. |
| Iki K, Kawamoto S, Morino Y. 2014. Experiments and numerical simulations of an electrodynamic tether deployment from a spool-type reel using thrusters. Acta Astronautica, 94:318-327. |
| Iñarrea M, Lanchares V, Pascual A I, Salas J P. 2014. Attitude stabilization of electrodynamic tethers in elliptic orbits by time-delay feedback control. Acta Astronautica, 96:280-295. |
| Iñarrea M, Peláez J. 2010. Libration control of electrodynamic tethers using the extended time-delayed autosynchronization method. Journal of Guidance, Control, and Dynamics, 33:923-933. |
| Ishige Y, Kawamoto S, Kibe S. 2004. Study on electrodynamic tether system for space debris removal. Acta Astronautica, 55:917-929. |
| Janeski J A, Hall C D, Scales W A. 2015. Effects of local plasma environment on dynamics of electrodynamic tether systems. Journal of Spacecraft and Rockets, 52:496-505. |
| Johnson L, Carroll J, Estes R D, Lorenzini E C, Gilchrist B, Martinez-Sanchez M, Sanmartin J, Vas I. 1996. Electrodynamic tethers for reboost of the international space station and spacecraft propulsion. In:Proceedings of Space Programs and Technologies Conference, Huntsville, USA. |
| Johnson L, Estes R D, Lorenzini E C, Martinez-Sanchez M, Sanmartin J, Vas I. 1998a. Electrodynamic tethers for spacecraft propulsion. In:Proceedings of 36th Aerospace Sciences Meeting and Exhibit, Reno, USA. |
| Johnson L, Herrmann M. 1998b. International space station electrodynamic tether reboost study.[Report]. Washington D.C:National Aeronautics and Space Administration, 1998-208538. |
| Katz I, Anderson J R, Polk J E, Brophy J R. 2003. One-dimensional hollow cathode model. Journal of Propulsion and Power, 19:595-600. |
| Kawamoto S, Makida T, Sasaki F, Okawa Y, Nishida S. 2006. Precise numerical simulations of electrody-namic tethers for an active debris removal system. Acta Astronautica, 59:136-148. |
| Kawashima N, Sasaki S, Oyama K I, Hirao K, Obayashi T, Raitt W J, White A B, Williamson P R, Banks P M. 1988. Results from a tethered rocket experiment(Charge-2). Advances in Space Research, 8:197-201. |
| Khazanov G V, Krivorutsky E N, Johnson L. 2006. Electrodynamic tether as a thruster for LEO mission ap-plications. In:Proceedings of 42nd AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Sacramento, USA. |
| Kim I, Hirayama H, Hanada T. 2010. Practical guidelines for electro-dynamic tethers to survive from orbital debris impacts. Advances in Space Research, 45:1292-1300. |
| Kojima H, Iwashima H, Trivailo P M. 2011. Libration synchronization control of clustered electrodynamic tether system using kuramoto model. Journal of Guidance, Control, and Dynamics, 34:706-718. |
| Kojima H, Sugimoto T. 2007. Nonlinear control of a double pendulum electrodynamic tether system. Journal of Spacecraft and Rockets, 44:280-284. |
| Kojima H, Sugimoto T. 2009. Stability analysis of in-plane and out-of-plane periodic motions of electrody-namic tether system in inclined elliptic orbit. Acta Astronautica, 65:477-488. |
| Kojima H, Sugimoto T. 2010. Switching delayed feedback control for an electrodynamic tether system in an inclined elliptic orbit. Acta Astronautica, 66:1072-1080. |
| Korepanov V, Dudkin F. 2001. Electrodynamic tether system-possibility of realisation. Physics and Chem-istry of the Earth, 26:281-283. |
| Lanoix E L M, Misra A K, Modi V J, Tyc G. 2005. Effect of electrodynamic forces on the orbital dynamics of tethered satellites. Journal of Guidance, Control, and Dynamics, 28:1309-1315. |
| Larsen M B, Blanke M. 2007. Nonlinear control of electrodynamic tether in equatorial or somewhat inclined orbits. In:Proceedings of 15th Mediterranean Conference on Control and Automationt, Athens, Greece. |
| Larsen M B, Blanke M. 2009. Control by damping injection of electrodynamic tether system in an inclined orbit. In:Proceedings of 2009 American Control Conference, St. Louis, USA. |
| Mankala K K, Agrawal S K. 2005. Equilibrium-to-equilibrium maneuvers of rigid electrodynamic tethers.Journal of Guidance, Control, and Dynamics, 28:541-545. |
| Mankala K K, Agrawal S K. 2006. Equilibrium-to-equilibrium maneuvers of flexible electrodynamic tethers in equatorial orbits. Journal of Spacecraft and Rockets, 43:651-658. |
| Mantellato R, Pertile M, Colombatti G, Lorenzini E C. 2013. Analysis of passive system to damp the libration of electrodynamic tethers for deorbiting. In:Proceedings of AIAA SPACE 2013 Conference and Exposition, San Diego, USA. |
| Marshall L S, Griger R V. 1995. Deployer performance results for the TSS-1 mission.[Report]. Washington DC:National Aeronautics and Space Administration, NASA-CR-202595. |
| McTernan J K, Bilén S G. 2013. The plasma-spacecraft interface on small-scale spacecraft with implications for electrodynamic tether systems. In:Proceedings of AIAA Space 2013 Conference and Exposition, San Diego, USA. |
| Morris D. 2005. Optimizing space-charge limits of electron emission into plasmas in space electric propulsion.[PhD Thesis]. Michigan:University of Michigan. |
| Ohkawa Y, Kitamura S, Kawamoto S, Matsumoto K, Kibe S, Matsumoto T, Murata F, Matsui M, Yamagiwa Y. 2011. A carbon nanotube field emission cathode for electrodynamic tether systems. In:Proceedings of 32nd International Electric Propulsion Conference, Wiesbaden, Germany. |
| Oishi A, Hirayama H, Hanada T, Yasaka T, Pardini C, Anselmo L. 2004. Assessment of collision risk to electrodynamic tether used for de-orbiting. In:Proceedings of 55th International Astronautical Congress, Vancouver, Canada. |
| Okawa Y, Kitamura S, Kawamoto S. 2007. An experimental study on carbon nanotube cathodes for elec-trodynamic tether propulsion. Acta Astronautica, 61:989-994. |
| Pardini C, Hanada T, Krisko P H. 2009. Benefits and risks of using electrodynamic tethers to de-orbit spacecraft. Acta Astronautica, 64:571-588. |
| Pardini C, Hanada T, Krisko P H, Anselmo L, Hirayama H. 2007. Are de-orbiting missions possible using electrodynamic tethers? Task review from the space debris perspective. Acta Astronautica, 60:916-929. |
| Pearson J. 2010. The electrodynamic debris eliminator(EDDE) removing debris in space. The Bent of Tau Beta Pi, spring:17-21. |
| Pearson J, Carroll J, Levin E, Oldson J, Hausgen P. 2003. Overview of the electrodynamic delivery express(EDDE). In:Proceedings of 39th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Huntsville, USA. |
| Pearson J, Levin E, Carroll J A, Oldson J C. 2004. Orbital maneuvering with spinning electrodynamic tethers. In:Proceedings of 2nd International Energy Conversion Engineering Conference, Providence, USA. |
| Peláez J, Andrés Y N. 2005a. Dynamic stability of electrodynamic tethers in inclined elliptical orbits.Journal of Guidance, Control, and Dynamics, 28:611-622. |
| Peláez J, Lorenzini E C. 2005b. Libration control of electrodynamic tethers in inclined orbit. Journal of Guidance, Control, and Dynamics, 28:269-278. |
| Peláez J, Lara M. 2003. Periodic solutions in electrodynamic tethers on inclined orbits. Journal of Guidance, Control, and Dynamics, 26:395-406. |
| Peláez J, Lorenzini E C, Lopez-Rebollal O, Ruiz M. 2000. A new kind of instability of electrodynamic tethers. In:Proceedings of AAS/AIAA Space Flight Mechanics Meeting, Clearwater, USA. |
| Peláez J, Ruiz M, López-Rebollal O, Lorenzini E C, Cosmo M L. 2002. Two-bar model for the dynamics and stability of electrodynamic tethers. Journal of Guidance, Control, and Dynamics, 25:1125-1135. |
| Peláez J, Sanjurjo M. 2006a. Generator regime of self-balanced electrodynamic bare tethers. Journal of Spacecraft and Rockets, 43:1359-1369. |
| Peláez J, Sanjurjo M. 2006b. Self-balanced electrodynamic tehters for space debris mitigation. In:Proceed-ings of 57th International Astronautical Congress, Valencia, Spain. |
| Peláez J, Sanjurjo M, Fontdecabe J. 2004. Satellite deorbiting using a self balanced electrodynamic tether.In:Proceedings of 55th International Astronautical Congress, Vancouver, Canada. |
| Rasmussen C E, Banks P M. 1988. Theory of the electrodynamic tether. Advances in Space Research, 8:203-211. |
| Robertson M J. 2005. Command generation and control of momentum exchange electrodynamic reboost tethered satellite.[Final Report of Graduate Student Researchers Program]. Washington D.C:National Aeronautics and Space Administration. |
| Sabey N, Tragesser S. 2008. Effects of libration on general electrodynamic tether orbital maneuvers. In:Proceedings of AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Honolulu, USA. |
| Samanta Roy R I, Hastings D E, Ahedo E. 1992. Systems analysis of electrodynamics tethers. Journal of Spacecraft and Rockets, 29:415-424. |
| San H. 2002. Orbital maneuvering using electrodynamic tethers.[Master Thesis]. Dayton:Air Force Institute of Technology. |
| Sánchez-Arriaga G, Bombardelli C, Chen X. 2015. Impact of nonideal effects on bare electrodynamic tether performance. Journal of Propulsion and Power, 31:951-955. |
| Sanjurjo-Rivo M. 2009. Self balanced bare electrodynamic tethers. Space debris mitigation and other applications.[PhD Thesis]. Madrid:Universidad Politécnica de Madrid. |
| Sanjurjo-Rivo M, Peláez J. 2011. Energy analysis of bare electrodynamic tethers. Journal of Propulsion and Power, 27:246-256. |
| Sanjurjo-Rivo M, Scheeres D J, Peláez J. 2014. Jovian capture of a spacecraft with a self-balanced electro-dynamic bare tether. Journal of Spacecraft and Rockets, 51:1401-1412. |
| Sanmartín J R. 2010a. A review of electrodynamic tethers for science applications. Plasma Source Science and Technology, 19:34022-34028. |
| Sanmartín J R, Lorenzini E C, Martinez-Sanchez M. 2010b. Electrodynamic tether applications and con-straints. Journal of Spacecraft and Rockets, 47:442-456. |
| Sanmartín J R, Charro M. 2006a. Performance of electrodynamic tethers and ion thrusters against hybrid systems. Journal of Propulsion and Power, 22:698-700. |
| Sanmartín J R, Elaskar S A. 2006b. Efficiency of electrodynamic tether thrusters. Journal of Spacecraft and Rockets, 43:659-666. |
| Sanmartín J R, Lorenzini E C. 2005. Exploration of outer planets using tethers for power and propulsion.Journal of Propulsion and Power, 21:573-576. |
| Sanmartín J R, Martínez-Sánchez M, Ahedo E. 1993. Bare wire anodes for electrodynamic tethers. Journal of Propulsion and Power, 9:353-360. |
| Sasaki S, Oyama K I, Kawashima N, Watanabe Y, Obayashi T, Raitt W J, White A B, Banks P M, Williamson P R, Sharp W F, Yokota T, Hirao K. 1987. Results from a series of tethered rocket experi-ments. Journal of Spacecraft and Rockets, 24:444-453. |
| Schadegg M M, Russell R P, Lantoine G. 2015. Jovian orbit capture and eccentricity reduction using electrodynamic tether propulsion. Journal of Spacecraft and Rockets, 52:506-516. |
| Sedwick R J, Schweighart S A. 2002. Propellantless spin-up of tethered or electromagnetically coupled sparse apertures. In:Proceedings of SPIE, 4849:193-204. |
| Shiah A, Hwang K S, Wu S T, Stone N H. 1997. Three-dimensional simulation of current collection in space.Planetary and Space Science, 45:475-482. |
| Stevens R E. 2008a. Optimal control of electrodynamic tether satellites.[PhD Thesis]. Dayton:Air Force Institute of Technology. |
| Stevens R E, Wiesel W. 2008b. Large time scale optimal control of an electrodynamic tether satellite.Journal of Guidance, Control, and Dynamics, 31:1716-1727. |
| Stevens R E, Baker W P. 2009. Optimal control of a librating electrodynamic tether performing a multirev-olution orbit change. Journal of Guidance, Control, and Dynamics, 32:1497-1507. |
| Stone N H. 1996. Electrodynamic characteristics of the tethered satellite system during the TSS-1R mission.In:Proceedings of AIAA Space Programs and Technologies Conference, Huntsville, USA. |
| Stone N H, Gierow P A. 2001. A preliminary assessment of passive end-body plasma contactors. In:Proceedings of 39th Aerospace Sciences Meeting and Exhibit, Reno, USA. |
| Stone N H, Raitt W J, Wright K H. 1999. The TSS-1R electrodynamic tether experiment:scientific and technological results. Advances in Space Research, 24:1037-1045. |
| Tahara H, Nishio H, Onishi T. 2004. Basic study of electron collection by a bare tethered satellite. Vacuum, 73:455-460. |
| Takeichi N. 2006. Practical operation strategy for deorbit of an electrodynamic tethered system. Journal of Spacecraft and Rockets, 43:1283-1288. |
| Tortora P, Somenzi L, Iess L, Licata R. 2006. Small mission design for testing in-orbit an electrodynamic tether deorbiting system. Journal of Spacecraft and Rockets, 43:883-892. |
| Tragesser S G, San H. 2003. Orbital maneuvering with electrodynamic tethers. Journal of Guidance, Control, and Dynamics, 26:805-810. |
| Tyc G, Han R P S. 1995. Attitude dynamics investigation of the OEDIPUS-A tethered rocket payload.Journal of Spacecraft and Rockets, 32:133-141. |
| Valverde J, Escalona J L, Mayo J, Domínguez J. 2003. Dynamic analysis of a light structure in outer space-short electrodynamic tether. Multibody System Dynamics, 10:125-146. |
| Valverde J, van der Heijden G H M. 2010. Magnetically-induced buckling of a whirling conducting rod with applications to electrodynamic space tethers. Journal of Nonlinear Science, 20:309-339. |
| van Dijk A, Kruijff M, van der Heide E J, Lebreton J P. 2003. LeBRETON, a lightweight bare rotating tether system for Jovian atmospheric entry. In:Proceedings of 54th International Astronautical Congress of the International Astronautical Federation, the International Academy of Astronautics, and the International Institute of Space Law, Bremen, Germany. |
| Vannaroni G, Dobrowolny M, De Venuto F. 2001. Deorbiting with electrodynamic tethers comparison between different tether configurations. Space Debris, 1:159-172. |
| Vas I E, Kelly T J, Scarl E A. 2000. Space station reboost with electrodynamic tethers. Journal of Spacecraft and Rockets, 37:154-164. |
| Vaughn J A, Curtis L, Gilchrist B E. 2004. Review of the ProSEDS electrodynamic tether mission develop-ment. In:Proceedings of 40th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, Fort Lauderdale, USA. |
| Viennet E, Steindl A, Troger H. 2005. Control of electrodynamic tether vibrations in space. Proceedings in Applied Mathematics and Mechanics, 5:141-142. |
| Vigneron F R, Schultz F, Jablonski A M, Tyc G. 1998. Tether deployment and trajectory modeling for the OEDIPUS missions. AIAA-98-4553. |
| Watanabe T, Makida T, Fujii H A, Kojima H, Singhose W. 2004. An application of input shaping for electrodynamic tether system. In:Proceedings of AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Providence, USA. |
| Wen H, Jin D P, Hu H Y. 2008. Advances in dynamics and control of tethered satellite systems. Acta Mechanica Sinica, 24:229-241. |
| Williams J D, Sanmartin J R, Rand L P. 2012. Low work-function coating for an entirely propellantless bare electrodynamic tether. IEEE Transactions on Plasma Science, 40:1441-1445. |
| Williams P. 2005a. Optimal orbital transfer with electrodynamic tether. Journal of Guidance, Control, and Dynamics, 28:369-372. |
| Williams P. 2005b. Optimal orbital maneuvers using electrodynamic tethers. In:Proceedings of AAS/AIAA Astrodynamics Specialist Conference, Lake Tahoe, USA. |
| Williams P. 2006a. Periodic solutions of electrodynamic tethers under forced current variations. In:Pro-ceedings of AIAA/AAS Astrodynamics Specialist Conference and Exhibit, Keystone, USA. |
| Williams P. 2006b. Simple approach to orbital control using spinning electrodynamic tethers. Journal of Spacecraft and Rockets, 43:253-256. |
| Williams P. 2006c. Energy rate feedback for libration control of electrodynamic tethers. Journal of Guidance, Control, and Dynamics, 29:221-223. |
| Williams P. 2009. Libration control of electrodynamic tethers using predictive control with time-delayed feedback. Journal of Guidance, Control, and Dynamics, 32:1254-1268. |
| Williams P. 2010. Optimal control of electrodynamic tether orbit transfers using timescale separation.Journal of Guidance, Control, and Dynamics, 33:88-98. |
| Williams S D. 1999. Using an electrodynamic tethered satellite as anionospheric electric double probe to estimate tethered satellite motion and measure vertical electric field.[PhD Thesis]. Ann Arbor:Stanford University. |
| Yamaigiwa Y, Hiragi E, Kishimoto T. 2005. Dynamic behavior of electrodynamic tether deorbit system on elliptical orbit and its control by Lorentz force. Aerospace Science and Technology, 9:366-373. |
| Yu B S, Wen H, Jin D P. 2015. A new stabilization strategy for deployment of tethered satellite systems in three-dimensional space. Acta Mechanica(under review) |
| Zakrzhevslii A E, Pirozhenko A V. 2007. Motion parameters of an electrodynamic tether in orbit. Interna-tional Applied Mechanics, 43:335-343. |
| Zanutto D, Curreli D, Lorenzini E C. 2011. Stability of electrodynamic tethers in a three-body system.Journal of Guidance, Control, and Dynamics, 34:1441-1456. |
| Zeineh C F. 2005. Applications of an electrostatic high-voltage tether to radiation belt remediation.[Master Thesis]. Cambridge:Massachusetts Institute of Technology. |
| Zhong R, Zhu Z H. 2012. Dynamics of deorbiting of low earth orbit nano-satellites by bare electrodynamic tether. In:Proceedings of AIAA SPACE 2012 Conference and Exposition, Pasadena, USA. |
| Zhong R, Zhu Z H. 2013a. Dynamics of nanosatellite deorbit by bare electrodynamic tether in low earth orbit. Journal of Spacecraft and Rockets, 50:691-700. |
| Zhong R, Zhu Z H. 2013b. Nano-satellite deorbit by bare electrodynamic tether. In:Proceedings of AIAA Atmospheric Flight Mechanics Conference, Boston, USA. |
| Zhong R, Zhu Z H. 2013c. Libration dynamics and stability of electrodynamic tethers in satellite deorbit.Celestial Mechanics and Dynamical Astronomy, 116:279-298. |
| Zhong R, Zhu Z H. 2013d. Long term dynamics and optimal control of nano-satellite deorbit using a short electrodynamic tether. Advances in Space Research, 52:1530-1544. |
| Zhong R, Zhu Z H. 2013e. Hybrid optimal control based on current on-off regulation of a short electrodynamic tether. In:Proceedings of AIAA Space 2013 Conference and Expossition, San Diego, USA. |
| Zhong R, Zhu Z H. 2014. Optimal control of nanosatellite fast deorbit using electrodynamic tether. Journal of Guidance, Control, and Dynamics, 37:1182-1193. |
| Zhou X, Li J F, Baoyin H X, Zakirov V. 2006. Equilibrium control of electrodynamic tethered satellite systems in inclined orbits. Journal of Guidance, Control, and Dynamics, 29:1451-1454. |
| Zhu Z H, Zhong R. 2011. Deorbiting dynamics of electrodynamic tether. International Journal of Aerospace and Lightweight Structures, 1:47-66. |