 2012, Vol. 48
2012, Vol. 48文章信息
- 杨秀好, 骆有庆, GreggHenderson, 毛立新
- Yang Xiuhao, Luo Youqing, Gregg Henderson, Mao Lixin
- 基于雷达遥感技术的土栖白蚁探测
- Subterranean Termite Detection with a Ground Penetrating Radar Technique
- 林业科学, 2012, 48(1): 121-125.
- Scientia Silvae Sinicae, 2012, 48(1): 121-125.
-
文章历史
- 收稿日期:2010-05-03
- 修回日期:2011-07-05
-
作者相关文章


2. 广西森林病虫害防治站 南宁 530022;
3. 美国路易斯安那州立大学农业中心 Baton Rouge LA 70803
2. Department of Guangxi Forestry Pest Management Nanning 530022;
3. Louisiana State University Agricultural Center Baton Rouge, LA 70803
土栖白蚁是世界上分布广泛、破坏力强、经济损失巨大的害虫之一(Yates et al., 1999)。在美国, 仅台湾土白蚁(Coptotermes formosanus) 1个种于1965年在Houston发现后, 到本世纪初已蔓延至11个州90个县(区)(Yates et al., 1999:Woodson et al., 2001; Matthew et al., 2002; Mary et al., 2007)。土栖白蚁危害树根、树干, 可造成林木枯死; 危害住房、电线杆、枕木等工程筑物, 造成巨大破坏; 在地下营建巢穴、挖掘活动管路, 造成路基塌方、水库江河堤坝决堤等, 全美每年用于控制白蚁和修复白蚁破坏的花费达10亿美元以上, 白蚁造成的经济损失惊人(Su, 1994)。在美国南方港口城市新奥尔良市, 1992年飓风Andrew刮倒了350棵树, 其中50%的倒树受过白蚁危害; 2005年当飓风Katrina和Cindy再次袭击该市时, 4 /5的倒树发现受白蚁侵害, 这次飓风造成了该市London运河2处决堤, 大部城市被洪水淹没, 导致1 800人死亡, 专家认为此次决堤跟土栖白蚁活动和危害有关(Henderson, 2008)。
土栖白蚁种群密度大, 活动隐蔽, 对林木危害大, 在没有造成明显危害前很难被发现, 监测和防治难度大(Yates et al., 1999)。传统的土栖白蚁监测方法是查看白蚁行踪、挖掘活动场所, 这种方法往往费力、费时、低效率, 又破坏环境(Dong et al., 2006: Wang et al., 2007)。雷达地下遥感技术又称探地雷达技术(ground penetrating radar, GPR), 是一项非破坏性、收集和记录浅层地下目标影像的地球物理探测技术(Conyers, 2004; Daniels, 2004), 它通过地面天线以雷达波的形式向地下发射电磁脉冲, 当电磁脉冲遇到电介性能不同的目标界面时, 电磁脉冲被反射回地面并由接收天线接收, 数字处理器记录返回电磁脉冲强度(振幅)和双程走时(two-way travel time), 接收到的信号强度经中央控制器处理后以不同的彩色图纹描绘在接收机上, 形成地下目标轮廓影像图, 影像数据可输入电脑作进一步分析处理和解释(Conyers, 2004; Butor et al., 2001)。
雷达遥感技术作为一种快速、非破坏性和可重复的地下目标成像探测工具, 已在地质、水文、考古、工程、生态、农业、林业以及法学等众多领域广泛应用。有专家已成功应用该技术探测树根、绘制根系和估测树木根系生物量(Hruska et al., 1999:Butor et al., 2001:Hagrey, 2007); Cox等(2005)应用该技术在清理桃园时探测和量化与桃根腐病(Armillaria spp.)密切相关的桃树残根碎片, 评估桃树根清理程度, 预测下一茬桃树根腐病发生状况; Kinlaw等(2007)用该技术给滩涂穴居沙龟(Gopherus polyphemus)隧道成像; Schultz(2007)用该技术定位命案死者埋葬位置。然而, 这项先进技术尚未被用于探测和监测林木主要害虫—土栖白蚁。
笔者通过模拟和实地探测试验, 测定地下目标影像尺寸, 建立目标尺寸-影像尺寸线性关系模型, 构建土栖白蚁蚁巢的2维和3维影像, 为雷达遥感技术在土栖白蚁监测中的应用奠定技术基础。
1 材料与方法 1.1 遥感设备SIR-3000雷达探测系统, 由美国地球物理测绘公司(Geophysical Survey System Inc., North Salem, New Hampshire, USA)生产。该系统由400 MHz天线、测距轮、屏蔽线缆和中央数字控制器组成。
1.2 模拟测试场地和测试材料目标掩埋和模拟试验场地设在美国路易斯安那州立大学校园新棒球馆建设区, 分别用建筑沙和壤土2种介质掩埋。探测目标分别为金属管和台湾土白蚁蚁巢, 建筑用挖掘机协助掩埋和挖掘工作。7段长约60 cm, 直径分别为8.89, 3.81, 3.28, 2.54, 1.90, 1.27和1.11 cm的金属管(条)用于测定探测深度和目标大小与影像尺寸的关系, 其中3.28 cm和1.27 cm 2段金属管用于测定影像尺寸随深度变化关系, 建立目标尺寸与雷达影像尺寸线性模型。一条直径0.40 cm的金属线用于测定雷达设备的灵敏性。模拟测试的白蚁蚁巢尺寸为28 cm × 25 cm × 7.5 cm, 近立方体。试验地土壤取样送路易斯安那州立大学土壤实验室测定粘土含量和土壤类型。每次探测前用土壤湿度仪(Moisture Meter 6405)测定土壤湿度, 方法是将传感器电极插入土壤30 cm以下, 2 ~ 3 min后即可从数字显示器上读出土壤湿度, 从绝干到饱和的土壤湿度显示范围为0 ~ 10。探测试验时间为2008年5—7月。
1.3 林地探测场地实地探测场地设在美国路易斯安那州新奥尔良市密西西比河岸边约100 m × 30 m的一块平缓林地。主要树种有美洲山核桃(Carya illinoinensis)、槲树(Quercus giniana)、红枫(Acer rubrum)、秃杉(Tawania flousiana)等, 多为生长数十年的老树, 易受白蚁危害。首先通过常规检查发现该区域有白蚁活动, 雷达探测集中在白蚁活动较频繁的区域。根据探测到的雷达影像特征, 选择有代表性的影像定位并开挖验证。土壤取样送路易斯安那州立大学土壤实验室测定土壤类型。
1.4 雷达影像数据获取通过掩埋模拟探测, 分别获取30, 50和100 cm深度不同直径金属目标的影像, 同时用3.28 cm和1.27 cm 2根金属管按10 cm的间距分别获取10 ~ 100 cm不同深度的雷达影像。雷达天线沿着与金属管垂直的方向移动并扫描, 每个目标扫描至少3次。时间窗(two-way travel time)设置:沙土介质为50 ns, 壤土介质为30 ns, 近似为在沙土和壤土中的探测深度分别为400 cm和150 cm。其他参数设置为:samples = 512, format = 16 bits, scan rate = 100, scan/unit = 72 ~ 108 scan·m-1, stacking = 0。
将同一尺寸的蚁巢分别埋在沙质和壤土介质中进行模拟测试, 雷达从蚁巢正上方扫描, 分别获取30 cm和50 cm深度的蚁巢2D影像(重复多次, 直到影像满意为止), 然后, 以蚁巢为中心, 在地面设计1个间距为15 cm, 纵横7 × 7的扫描网络, 雷达参数设置为3D Quick模式, 按照7 × 7网络扫描获取3D数据。林地实地探测沿着河岸方向扫描, 扫描间距为30 cm。
1.5 数据处理2D图像处理使用美国地球物理测绘公司开发的RADAN 6.5数据分析处理系统。主要进行目标位置修正、消除背景干扰、垂直堆栈等处理, 使目标影像清晰, 便于解释。雷达波在地下的穿透速度公式为
有效探测深度的测定:在RADAN系统中打开2D雷达影像图, 以linescan + wiggle模式显示, 在右侧的O-Scope窗口中, 线条由平滑线到锯齿线间有一个明显的分界点, 这个点代表雷达波在土壤中穿透的极限深度, 这个点的双程走时可以测得, 有效深度计算公式为
3D图像处理使用加拿大地球物理考古实验室开发的GPR-SLICE v 5.0雷达影像软件(Dean Goodman, Geophysical Archaeometry Laboratory, 20014 Gypsy Ln, Woodland Hills, CA), 处理3D网格数据, 建立蚁巢3D影像。
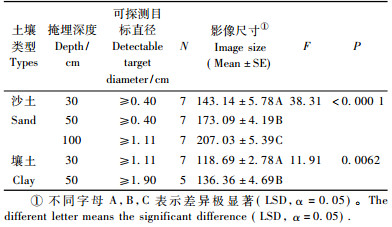
2 结果与分析 2.1 金属目标探测试验 2.1.1 有效探测深度和不同深度目标分辩率探测结果表明:在沙质介质中, 介电常数为4, 电磁波传输速度为15 cm·ns-1, 双程走时为42 ns, 有效深度为315 cm; 在壤土介质中, 介电常数为20, 电磁波传输速度为6.7 cm·ns-1, 双程走时为16 ns, 有效深度为53 cm。随着深度增加, 目标分辩率降低(即可探测目标尺寸增大)。在沙土和壤土中同一深度可探测的目标尺寸也不同, 在沙质介质中30 cm和50 cm均可探测到0.40 cm以上的金属目标, 而100 cm深度只能探测1.11 cm以上的金属目标, 在壤土介质中, 30 cm深度能探测到1.11 cm以上金属目标, 而在50 cm深度仅能探测到1.90 cm以上的金属目标, 同一目标不同深度的影像尺寸差异极显著(表 1)。
|
|
2段大小不同的金属管于不同深度沙埋测试得到的影像尺寸变化关系如图 1所示, 影像尺寸与掩埋深度成正相关, 总体趋势是随着掩埋深度增加, 目标影像尺寸增大。

|
图 1 目标深度与影像尺寸关系 Figure 1 Correlation between buried depth and image size |
7根不同直径的金属管(条)掩埋于同一深度, 探测试验结果表明目标尺寸与影像尺寸成正相关, 即目标越大, 影像尺寸也越大。根据沙质和壤土中的目标尺寸和影像尺寸关系, 建立线性关系模型(图 2)。雷达影像尺寸与土壤介质关系密切, 即相同的目标在沙土和壤土中探测到的影像尺寸不一样, 在沙土中的影像大于壤土中的影像。

|
图 2 目标尺寸与影像宽度线性模型 Figure 2 Correlation between target size and image size |
蚁巢的2D和3D雷达影像图如图 3所示, 其中A, B为2D影像图, C, D为3D影像图。2D影像为双曲线特征的反射影像, 沙质土壤的双曲线影像比同一深度壤土中的双曲线影像宽; 3D影像大致能反映蚁巢的轮廓, 在沙土中的3D影像略呈方形且图形较大, 而壤土中的3D影像呈圆形且图形较小, 说明雷达探测沙质土壤中的目标较真实。

|
图 3 蚁巢2D和3D影像 Figure 3 2D and 3D images of carton nest a, c:分别为沙土中的2D和3D影像2D and 3D images buried in sand; b, d:分别为壤土中的2D和3D影像2D and 3D images buried in soil. |
图 4是图 3(D)在不同深度的3D图层切面图(slices), 可显示探测目标的内部特征, 随着深度增加, 雷达信号减弱, 探测到的信息逐步减少, 图像尺寸减小。

|
图 4 蚁巢3D影像在不同深度的横切面 Figure 4 3D image slices of carton nest in transverse section |
实地探测得到的地下目标影像比较复杂, 经过反复对比研究和有代表性地开挖验证, 得到以下4类主要目标特征:
1) 金属:包括金属管、钢筋、金属线缆和其他金属碎片, 影像特征为多重双曲线强反射(图 5a);

|
图 5 林地探测主要目标影像特征 Figure 5 Mean target images of GPR in forestry field a:金属Metal; b:空洞Void; c:树根Tree roots; d:白蚁巢Termite nest. |
2) 空洞:气充空洞包括地下非金属管道、洞穴、动物开挖的活动隧道等, 影像特征为形状较规则的单一双曲线反射(图 5b);
3) 树根:包括树根、树桩、粗木质碎片等, 影像特征为形状较规则、带折射和衍射的2 ~ 3重双曲线(图 5c);
4) 蚁巢:影像特征为形状较不规则、呈发散性的双曲线(图 5d)。
2.3.2 蚁巢尺寸测量实地探测发现3个区域影像特征疑似白蚁巢穴, 经开挖验证, 1个区域为石块, 1个区域为分层比较明显的土层, 另1个区域在30 cm的浅表层得到1个长宽高为29 cm × 22 cm × 20 cm的活动蚁巢。巢穴周围土壤为沙壤。由于蚁巢所处的位置不便于雷达设备进行网格扫描, 只能获取宽度方向的雷达影像, 因此只对蚁巢的宽度进行了验证。模拟测试得到28 cm深壤土中的目标-影像尺寸线性模型为y = 2.503x + 110.5(R2 = 0.829, P = 0.026 5)(图 2), 测算蚁巢宽度为25.1 cm, 与真实蚁巢宽度误差为3.1 cm, 误差率19.7%。模拟探测测量的蚁巢尺寸误差率在15% ~ 40%之间, 综合平均误差率为1.93%(表 2)。因此, 多次测定取其平均值是提高测量精度的有效方法。
|
|

雷达遥感技术能够直接生成地下目标影像, 具有快速高效、省时省力、不破坏目标和环境以及重复性强的特点, 是林地土栖白蚁监测和防灾减灾的有效辅助工具。
3.2 探测目标与周围介质的电性差异直接影响探测效果地下目标反射雷达信号的强度取决于相邻2种介质的介电常数差异, 理论上讲, 当介电常数差异达到1以上时, 目标介面就可以产生信号反射, 介电常数差异越大信号反射越强(Conyers, 2004)。本研究的探测的白蚁蚁巢主要由具有防水功能的外壳、木纤维和充满空气的间格组成, 土壤和空气、木纤维之间的介电常数差异分别是15和6(Yang et al., 2009), 蚁巢内外湿度的差异也能产生电性差异, 因此, 蚁巢是比较好的雷达波反射体, 尤其是构筑于沙质土中、粘土含量少的蚁巢, 反射雷达波较强, 应用雷达遥感探测具有较广阔前景。
3.3 粘土含量和土壤含水量直接影响探测深度和目标分辩率雷达信号的穿透能力取决于土壤介质的信号衰减特征和雷达天线发射的中心频率(Smith et al., 1995; Butnor et al., 2001; Conyers, 2004), 由于较高的粘土含量或土壤含水量会使雷达信息严重衰减, 雷达地下遥感探测的理想条件是土壤中粘土和水份含量低(Finck, 2003)。在本研究模拟测试中, 400 MHz天线在沙质土壤中有效探测深度可达315 cm, 而在粘土中, 有效探测深度只有53 cm。白蚁巢可深达2.3 m(Yang et al., 2009), 若在沙质土壤中则雷达可探测到, 而在粘土中测超出了雷达可探测范围。因此雷达技术在探测白蚁中的应用以沙土为好。
3.4 该技术普及应用的限制雷达遥感成像技术的主要原理是地下目标介面对电磁脉冲的反射, 反射的强弱不完全取决于目标本身, 还取决于目标物与周围环境的电性差异(Conyers, 2004), 也就是说同一目标在不同的土壤介质中其影像特征可能很不一致, 不同类型目标的影像差异则更为复杂, 目标影像解释比较困难, 对影像解读人员的技术和经验要求较高。同时, 目前的雷达探测技术在粘土中的有效探测深度十分有限, 加上设备价格较昂贵等因素, 在一定程度上限制了雷达地下遥感技术的应用领域。蚁巢及白蚁主要活动场所可深达200 cm以下(Wang et al., 2007), 在粘土中已超出了雷达遥感探测的有效范围。然而, 随着技术进步和设备性能的提高, 雷达遥感技术在白蚁等地下害虫监测中将逐步发挥作用。
Butnor J R, Doolittle J M, Kress A L, et al. 2001. Use of groundpenetrating radar to study tree roots in the southeastern United States[J]. Tree Physiology, 21: 1269-1278. DOI:10.1093/treephys/21.17.1269 |
Conyers L B. 2004. Ground-Penetrating Radar for Archaeology[M]. Walnut Creek, CA: Alta Mira Press.
|
Cox K D, Scherm H, Serman N. 2005. Ground penetrating radar to detect and quantify residual root fragments following peach orchard clearing[J]. HortTechnology, 15: 600-607. |
Daniels D J.2004.Ground Penetrating Radar.2nd Edition.The Institute of Electrical Engineers, London, United Kingdom. http://www.tandfonline.com/doi/abs/10.1179/0093469015Z.000000000120?needAccess=true&journalCode=yjfa20
|
Dong H, Wang C, Wang H, et al. 2006. Two-dimensional resistivity imaging survey for detecting termitarium in a dam[J]. IEEE International Conference on Networking, Sensing and Control.Fort Lauderdale, Florida, 846. |
Finck F. 2003. Introduction of a ground penetrating radar system for investigations on concrete structures[J]. Otto-Graf-Journal, 14: 35-44. |
Hagrey S A. 2007. Geophysical imaging of root-zone, trunk, and moisture heterogeneity[J]. Journal of Experimental Botany, 58(4): 839-854. DOI:10.1093/jxb/erl237 |
Henderson G. 2008. The termite menace in New Orleans:did they cause the floodwalls totumble?[J]. American Entomologist, 54(3): 156-162. DOI:10.1093/ae/54.3.156 |
Hruska J, Cermak J, Sustek S. 1999. Mapping tree root systems with ground penetrating radar[J]. Tree Physiology, 19(2): 125-130. DOI:10.1093/treephys/19.2.125 |
Kinlaw A E, Conyers L B, Zajac W. 2007. Use of ground penetrating radar to image burrows of Gopher Tortoise(Gopherus polyphemus)[J]. Herpetological Review, 38(1): 50-55. |
Mary L C, Duplessis L M, Osbrink L A. 2007. The impact of Hurricane Katrina on the distribution of subterranean termite colonies(Iisoptera:Rhinotermitidae) in City Park, New Orleans, Louisiana[J]. Sociobiology, 50(2): 311-335. |
Matthew T M, Su N Y, Scheffrahn R H. 2002. Current distribution of the Formosan subterranean termite and other termite species(Iisoptera:Rhinotermitidae, kalotermitidae) in Louisiana[J]. Florida Entomologist, 85(4): 580-587. DOI:10.1653/0015-4040(2002)085[0580:CDOTFS]2.0.CO;2 |
Schultz J J. 2007. Using ground-penetrating radar to locate clandestine graves of homicide victims[J]. Homicide Studies, 11(1): 15-29. DOI:10.1177/1088767906296234 |
Smith D G, Jol H M. 1995. Ground penetrating radar:antenna frequencies and maximum probable depths of penetration in quaternary sediments[J]. Journal of Applied Geophysics, 33: 93-100. DOI:10.1016/0926-9851(95)90032-2 |
Su N Y. 1994. Field evaluation of a hexaflumuron bait for population suppression of subterranean termites(Isoptera:Rhinotermitidae)[J]. J Econ Entomol, 87(2): 389-397. DOI:10.1093/jee/87.2.389 |
Wang Z, Gao J, Gong Y, et al. 2007. Control of dam termites with a monotor-controlling device(Isoptera:Termitidae)[J]. Sociobiology, 50(2): 399-407. |
Woodson W D, Wiltz B A, Lax A R. 2001. Current distribution of the Formosan subterranean termite(Isoptera:Rhinotermitidae) in the United States[J]. Sociobiology, 37: 661-671. |
Yang X H, Henderson G, Mao L X. 2009. Application of ground penetrating radar in detecting the hazards and risks of termites and ants in soil levees[J]. Environ Entomol, 38(4): 1241-1249. DOI:10.1603/022.038.0435 |
Yates J R, Tamashiro M. 1999. The Formosan subterranean termite in Hawaii[J]. Household and Structural Pests, (2): 21-25. |