 2011, Vol. 47
2011, Vol. 47文章信息
- 李崇贵, 宋丽萍
- Li Chonggui, Song Liping
- 用主成分分析研究QuickBird遥感图像变形机制
- Deformation Mechanism of QuickBird Remote Sensing Image Using Principal Components Analysis
- 林业科学, 2011, 47(10): 76-82.
- Scientia Silvae Sinicae, 2011, 47(10): 76-82.
-
文章历史
- 收稿日期:2009-11-25
- 修回日期:2010-01-08
-
作者相关文章


2. 深圳市绿化管理处 深圳 518055
2. Greening Management Office of Shenzhen Urban Shenzhen 518055
近年来,伴随Spot5,Ikonos和QuickBird等高空间分辨率遥感图像应用的不断深入和普及,如何经济、高效、高精度纠正高空间分辨率遥感图像的几何变形,已成为实际工作中急需解决的生产难题。高空间分辨率遥感图像的几何变形,将严重影响以遥感图像为基础的不同地类面积量算、地面样地在遥感图像上的定位、遥感定量估测模型、遥感图像融合和各种规划设计等的精度,遥感图像要有效应用于实际生产,需先纠正其几何变形。
对于分辨率在2.5 m以下的中低分辨率遥感图像,传统校正方法一般是利用1:1万或1:5万比例尺的地形图,通过地形图量测在遥感影像上能有效识别的地面控制点平面坐标,然后借助商用遥感图像处理软件进行校正。伴随遥感图像空间分辨率的提高,图像变形受地形起伏和传感器倾斜扫描的影响将增大(Yastikli et al., 2005;Grodecki et al., 2003;Fraser et al., 2004),采用传统基于地形图量测控制点坐标的方法已无法满足校正精度要求(李崇贵等,2004;2005)。为此,需借助差分GPS定位高精度测定一定数量在遥感图像上能够有效识别的地面控制点坐标,采用适当的纠正模型来校正图像变形(Shi et al., 2003;Pfeifer,2005)。为有效校正图像变形,尽量减少野外测定地面控制点的工作量,需要研究高空间分辨率遥感图像的变形机制及定量描述模型,同时研究高空间分辨率遥感图像的几何纠正算法,以便探索适合实际生产应用的校正模型和地面控制点配置方案。本文根据实测地面控制点三维坐标,利用主成分分析对QuickBird Pan波段遥感图像的变形机制进行定量估测。
1 QuickBird遥感图像变形统计分析研究区域位于深圳市区,所采用的遥感信息源是空间分辨率为0.61 m的QuickBird Pan波段遥感图像,试验区遥感图像总行列数为26 574×28 606,对应的实地范围为15.944 km×17.164 km。在图像覆盖区域内,地形起伏的变化范围为1.00~380.00 m。因深圳已建成GPS虚拟参考站定位系统,可以厘米级精度测定地面控制点三维坐标,采用市区的高空间分辨率遥感图像,可采集一定数量的地面控制点,以便进行研究分析。在本文研究中,共计测定了65个地面控制点的三维坐标,各控制点的平面位置分布及控制范围如图 1所示。控制点覆盖矩形区域左下角和右上角的平面坐标分别为(501 350.27 m,2 489 888.69 m)、(516 702.20 m,2 499 650.05 m)。

|
图 1 各控制点的平面位置分布及控制范围 Figure 1 The distribution and control region of each GCP |
遥感图像是地面景物的多中心投影,当地面有起伏或倾斜扫描时,将导致地面点在地面水平遥感影像上的构像与地面有起伏或倾斜时在遥感影像上构像的点位不同,这种点位的差异称为像点位移,像点位移将导致图像变形。
根据研究区域所测n个地面控制点计算重心点,利用各控制点到重心点之间的实测水平距离和其在变形遥感影像上对应水平距离之差,来分析像点位移引起图像的变形大小及其随地形起伏的变化规律。设n个地面控制点实测三维坐标为(xi, yi, hi)(i=1, 2, …, n),在QuickBird遥感图像上这些点对应的行列号为(ri, ci),设遥感图像的空间分辨率为s。可计算n个实测地面控制点的重心坐标为:

|
(1) |
根据n个控制点在变形图像上对应行列号计算相应的重心坐标为:
|
(2) |
利用n个控制点实测平面坐标和实测重心坐标求差,计算n个控制点到重心点之间的实测水平距离dRi;利用n个控制点在变形图像上的行列号与在变形图像上的重心坐标之差,计算各控制点在变形图像上与相应重心点之间的水平距离dIi。将这2种距离之差定义为各控制点的像点位移di:

|
(3) |
式中: i=1, 2, …, n;s=0.6 m,为QuickBird遥感图像Pan波段的空间分辨率。
各控制点与实测重心点之间的高差为:
|
(4) |
按式(3)和(4)计算各控制点的像点位移和相对高差,其变化规律如图 2a,b所示,各控制点像点位移与相对高差的对应关系如图 2c所示, 各控制点像点位移与控制点海拔的对应关系如图 2d所示,控制点像点位移与控制点离重心点距离的关系如图 2e所示, 控制点像点位移与控制点离扫描中心线距离的关系如图 2f所示。

|
图 2 研究区域各控制点像点位移的变化规律 Figure 2 The changing law of the pixel displacement of each GCP in research region |
遥感图像变形受地形起伏的影响,还与成像点离星下点(扫描中心)的距离有关。QuickBird遥感图像属推扫式传感器成像,传感器沿着轨道的垂直方向对地面扫描,每扫描一行就构成一条中心投影的影像,由传感器的不断运动而构成连续影像。传感器在垂直于轨道的方向,一般要进行倾斜扫描,投影中心不是位移整景图像的中心。在图像预处理时已进行了旋转改正,为分析成像点离扫描中心线的距离对像点位移的影响,取传感器成像中心为图像的中心。对本文研究区域而言,各控制点离扫描中心线的水平距离可表示为:

|
(5) |
式中: ci为各控制点所在列号,14 303为研究区域遥感图像扫描中心线的列号。
图 2c~f为双坐标系,实线对应左侧坐标轴,虚线对应右侧坐标轴,以便进行2种因子相互关系的比较分析。统计各控制点的像点位移,并分析图 2a~f可得:
1) 取研究区域各实测控制点海拔的均值h=30.77 m为计算基准面,用式(3)计算各控制点的像点位移,得各控制点像点位移均值为d=-1.75 m,标准差为σd=4.22 m,在研究区域未校正的QuickBird遥感图像上,落入1倍、2倍和3倍中误差区间的像点位移分别为72.3%,89.2%和98.5%,像点位移大小基本服从正态分布。
2) 各控制点的像点位移受控制点和计算基准面之间的高差影响较大。在高差变化相对比较大的区间(图 2b,c),控制点像点位移变化幅度也比较大;在高差变化相对平稳的区间,像点位移变化值都较小,说明地形起伏对高空间分辨率遥感图像变形影响较大。
3) 各控制点的像点位移与实测海拔的关系密切,海拔越大,像点位移越大,在研究区域,当海拔在100 m左右时,像点位移接近于0。像点位移与海拔之间的变化关系呈非线性关系(图 2d)。
4) 各控制点像点位移大小与控制点离实测重心点的距离和控制点离扫描中心线的距离没有明显关系(图 2e, f)。
利用空间插值,可以得到研究区域各实测控制点反映的地形起伏和相应像点位移的变化规律,如图 3,4所示。

|
图 3 研究区域各控制点海拔的三维插值 Figure 3 The three-dimensional interpolation using each GCP's elevation in research region |

|
图 4 研究区域由重心点推算各点像点位移的三维插值 Figure 4 The three-dimensional interpolation of pixel displacement calculated with the point of center of gravity |
QuickBird遥感图像成像的传感器为单线阵推扫式传感器,在卫星飞行方向上,每一个扫描行就形成一幅图像。图像变形主要受倾斜扫描和地形起伏等因素的影响(王惠文等,2006;于秀林等,2006)。根据前面的统计分析,为探索遥感影像受倾斜扫描、地形起伏和传感器姿态角变化等因素引起的图像变形规律,在本文研究中,设引起各控制点像点位移的因素包括:

|
(6) |
在式(6)中,可能只有部分因子影响像点位移,其中一些因子对像点位移没有影响或影响较小,有些影响因子间还可能存在一定程度的复共线关系。为提取影响像点位移的主要因子,同时又能克服因子之间复共线性对建模的不利影响,采用主成分分析提取影响QuickBird遥感图像变形机制的因子,并建立估测模型(王惠文等,2006;于秀林等,2006)。
根据研究区域n个控制点坐标信息和式(6)中所列p个影响因子,组成观测阵X:
|
(7) |
对式(7)中的观测阵进行中心标准化处理,

|
(8) |
式中:xj是xj的样本均值;sj是xj的样本标准差。标准化处理可以消除因量纲不同所引起的虚假变异信息,使分析的结果更加合理。将中心标准化处理后的观测阵仍记为X。
计算标准化矩阵X的协方差阵
提取第1主成分F1(李崇贵等,2004;王惠文等,2006):
|
(9) |
式中:a1j是特征向量a1的第j个分量。
因主成分F1的方差Va(F1)=λ1r,反映了第1主成分所携带观测阵X中的变异信息,该值越大,所携带的变异信息就越大,由λ1≥λ2≥…λp可得:

|
(10) |
取前m个主成分所携带变异信息的总和不低于总变异信息的90%,即
|
(11) |
再利用这m个主成分作为自变量,建立QuickBird遥感图像像点位移的估测模型。根据65个控制点的观测信息,利用式(6)组成观测阵X,计算协方差阵V的特征值为:7.720 244,5.418 461,0.487 527,0.215 909,0.108 187,0.034 776,0.011 468,0.001 547,0.000 899,0.000 696,0.000 187,8.411 762 3e-005,8.295 81e-006,5.610 564 3e-006。前2个主成分变异信息的总和已超过总变异信息的90%。
计算式(6)中各因子与2个主成分的相关系数(李崇贵等,2004):

|
(12) |
以r(F1, xj)为横轴,r(F2, xj)为纵轴,绘制各影响因子的相关圆图,如图 5a所示,分析该图可得:主成分F1与sΔh2, Δh4, Δh2, Δh3, sΔh3, Δh, sΔh, s2Δh, s3Δh正相关,与s2Δh2, s2, s3, s, s4负相关;主成分F2与sΔh2, Δh4, Δh2, Δh3, sΔh3, Δh, sΔh, s2Δh2, s2, s3, s, s4正相关,与s2Δh, s3Δh负相关。

|
图 5 主成分与影响因子的相关关系和影响点分析 Figure 5 The correlation of principal components and influencing factors and analysis of influencing points |
定义第i个样本点(控制点)对主成分Fh的贡献率为(李崇贵等,2004):
|
(13) |
式中:Fh(i)是第i个样本点在主轴h上的坐标值,h=1, 2。
在实际研究中,不希望存在一个对主成分贡献率过大的样本点,这样的点已远离数据重心和结聚范围,一般称其为影响点,对模型拟合是不稳定因素。在本文研究中,取
利用2个主成分分别建立如下高分辨率遥感图像像点位移的估测方程:

|
(14) |
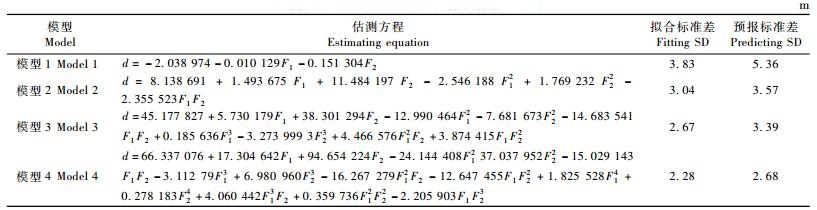
取65个控制点中前50个控制点对应的主成分F1和F2,采用最小二乘原理建立式(14)中的4种估测模型,分别计算4种模型的拟合标准差,利用余下的15个控制点检验所建模型的预报精度,4种模型的估测方程、拟合精度和预报精度如表 1所示。拟合偏差和预报偏差如图 6和7所示。
|
|

|
图 6 4种模型的拟合偏差 Figure 6 The fitting deviation of four kinds of model |

|
图 7 4种模型的预报偏差 Figure 7 The predicting deviation of four kinds of model |
直接使用s和Δh建立式(14)中所示的4种估测模型,每种模型的拟合标准差分别为:3.83,3.12,2.96,2.82 m,预报标准差分别为:5.22,3.17,3.44,2.51 m,拟合和预报偏差分别如图 8和9所示。对照表 1可得:除模型1外,采用主成分建模,精度要优于直接使用s和Δh建模的情况。

|
图 8 4种不用主分量分析建模的拟合偏差 Figure 8 The fitting deviation of four kinds of model without using principal components analysis |

|
图 9 4种不用主分量分析建模的预报偏差 Figure 9 The predicting deviation of four kinds of model without using principal components analysis |
通过上面的分析计算可得:
1) 采用主成分分析,提取能够最大限度代表观测阵中变异信息的主成分,用所得主成分建立QuickBird遥感图像像点位移的估测模型,精度要明显优于不使用主成分分析直接建模的情况。
2) 在建模过程中,伴随使用主成分阶数的增加,拟合和预报精度都明显提高,这说明尽管使用主成分分析,提取能够代表观测阵中最大变异信息的主成分,主成分的一次多项式远不能有效描述QuickBird遥感图像的变形机制。
3) 主成分的3次和4次多项式拟合和预报精度比较接近,4次多项式略优于3次多项式,但当采用5次多项式时,拟合精度会变优(标准差为1.93 m),预报精度却明显变差(标准差为4.40 m)。宜采用主分量的3次或4次模型估测图像变形大小。
4) 在提取主成分的过程中,观测阵最好尽可能包含对图像变形有影响的因子,在提取主成分的基础上建立估测模型,精度将有较大提高。
5) 剔除编号为50的影响点后,采用主成分建模的拟合和预报精度都明显提高;而不采用主成分直接建模,拟合和预报精度都有所降低。
3 结论高空间分辨率遥感图像变形主要受地形起伏的影响,地形起伏越大,像点位移的变化幅度就越大。除地形起伏影响因子外,还包括倾斜扫描和传感器姿态角变化等,其中有些因素是交叉影响,没有一个明确的模型。采用多项式估测模型来描述图像变形,应尽量考虑可能的影响因子。利用主成分分析提取主成分,根据所提取的主成分建立估测模型,精度将有明显提高。
利用主成分分析,可以有效探测地面控制点中的影响点数量和分布,利用主成分建模,在取消个别影响点后,模型拟合与预报精度将明显改善。不用主成分直接建模,精度则会降低。
利用遥感图像进行森林资源监测,一般都位于山区,地形起伏大,图像变形更严重,研究图像变形机制的定量估测模型,对改进遥感图像局部纠正和带权纠正算法有一定意义。在更大范围内,结合DEM模型,研究图像变形机制有待进一步试验。
李崇贵, 李春干. 2005. 森林资源调查林区GPS控制网的试验研究[J]. 林业科学, 41(1): 19-24. DOI:10.11707/j.1001-7488.20050105 |
李崇贵, 赵宪文. 2004. 林区地形起伏对Spot5遥感图像几何精校正的影响[J]. 北京林业大学学报, 26(2): 6-10. |
王惠文, 吴载斌, 孟洁. 2006. 偏最小二乘回归的线性和非线性方法[M]. 北京: 国防工业出版社.
|
于秀林, 任雪松. 2006. 多元统计分析[M]. 北京: 中国统计出版社.
|
Fraser C S, Yamakawa T. 2004. Insights into the affine model for high-resolution satellite sensor orientation[J]. ISPRS Journal of Photogrammetry & Remote Sensing, 58(5/6): 275-288. |
Grodecki J, Dial G. 2003. Block adjustment of high-resolution satellite images described by rational polynomials[J]. Photogrammetric Engineering & Remote Sensing, 69(1): 59-68. |
Pfeifer N. 2005. A subdivision algorithm for smooth 3D terrain models[J]. ISPRS Journal of Photogrammetry & Remote Sensing, 59(3): 115-127. |
Shi W, Ahmed S. 2003. Analysis of terrain elevation effects on Ikonos imagery rectification accuracy by using non-rigorous models[J]. Photogrammetric Engineering & Remote Sensing, 69(12): 1359-1366. |
Yastikli N, Jacobsen K. 2005. Influence of system calibration on direct sensor orientation[J]. Photogrammetric Engineering & Remote Sensing, 71(5): 629-633. |