 2010, Vol. 46
2010, Vol. 46文章信息
- 李春干, 邵国凡
- Li Chungan, Shao Guofan
- 面向对象的SPOT5图像森林分类
- Object-Oriented Classification of Forest Cover Using SPOT5 Imagery
- 林业科学, 2010, 46(8): 130-139.
- Scientia Silvae Sinicae, 2010, 46(8): 130-139.
-
文章历史
- 收稿日期:2008-10-06
- 修回日期:2009-05-10
-
作者相关文章


2. 美国普渡大学林业与自然资源系 西拉菲耶市 IN 47906
2. Department of Forestry and Natural Resources, Purdue University West Lafayette, IN 47906, USA
森林是一种可再生资源, 无时不处于消长交替的动态过程之中。开展森林资源调查和监测, 对一定时间、空间内的森林资源状态进行连续性跟踪调查(Kohl, 2004), 掌握其现状和消长变化情况, 预测其发展趋势, 为制定林业方针政策、中长期规划和生产经营计划(Janz, 1993), 检验经营成果等提供科学依据, 对于提高林业发展乃至经济社会发展科学决策水平, 促进林业和资源环境以及经济社会可持续发展具有极为重要的意义(Korotkov et al., 1993; Reese et al., 2003; Michael et al., 2004)。
传统的森林资源调查和监测方法以地面测量为主, 存在着工作量大、劳动强度高、时效性差等问题(赵宪文等, 2002), 且调查精度不高, 难以满足当今林业发展需要。研究表明, 以1:10 000地形图为工作手图实地勾绘小班, 面积平均误差为25.0%, 边界平均位移为9.3 m(李春干等, 2006)。因此, 长期以来, 众多学者致力于探讨新的适用技术体系(寇文正等, 1990; 包盈智等, 1996; 冯仲科等, 2001; 唐守正等, 2006)。以遥感(RS)、地理信息系统(GIS)和全球定位系统(GPS)的3S技术及其集成, 由于具有宏观性、综合性、短周期、可重复性和低成本等优势, 成为当前森林资源调查和监测研究的重点和热点(赵宪文等, 2002)。30多年来, 国内外学者对遥感技术在森林资源监测中的应用进行了大量的研究, 取得了丰硕成果(徐冠华, 1994; 赵宪文等, 2001a; 2001b; 李春干等, 2004; Smith, 2002; Tomppo et al., 2002; Kohl, 2004; Sievanen, 2004)。
然而, 当今遥感技术在森林资源调查和监测中的应用, 尤其是在以获取每个山头地块资源信息的、满足林业生产经营需要的、大面积的调查监测中的应用, 还存在很多问题:一是森林和土地覆盖分类问题还未得到有效解决, 特别是对于地形地貌复杂、森林分布破碎、类型和种类多样、结构复杂的南方林区, 情况更是如此; 二是森林斑块区划最小面积过大, 成图比例尺较小, 难以满足实际应用需要。
本文以SPOT5 HRG为数据源, 从图像分割、ETM+辅助数据的应用、对象特征提取与筛选、多分类器分类与结合等整个流程进行探索研究, 旨在提高SPOT5图像森林分类精度, 为提高森林资源监测效率寻求一条有效途径。
1 研究区域和数据源 1.1 研究区域概况试验区位于南宁市北面的高峰林场内(22°48′48″—23°3′34″ N, 108°7′55″—108°32′53″ E)。该区域东西长约42 km, 南北宽约27 km, 总面积27 318 hm2。属大明山余脉, 低山丘陵地貌, 海拔70~500 m, 坡度25~35°。地形比较封闭。
区域内绝大部分为人工林, 主要树种为杉木(Cunninghamia lanceolata)、马尾松(Pinus massoniana)、马占相思(Acacia mangium)、厚荚相思(A. crassicaroa)、尾叶桉(Eucalyptus urophylla)、木荷(Schima superba)、火力楠(Michelia macclurei)、八角(Illecium verum)、玉桂(Cinnamomum cassia)、龙眼(Dimocarpus longgana)、荔枝(Litchi chinensis)、粉单竹(Lingnania chungii)、麻竹(Dendrocalamus latiflorus)等。山沟有少量灌木。由于绝大部分为人工林, 加上地形复杂, 森林分布极为破碎, 表现为斑块小、不同树种呈无规律交叉分布。
1.2 遥感数据源研究采用2种数据源: 1) 2002年10月13日接收的SPOT 5 HRG 1A级同时相的2.5 m全色和10 m多光谱数据; 2) 2002年10月11日接收的Landsat 7 ETM+数据, 空间分辨率为15 m/30 m。此外, 还使用了试验区1998年与2004年森林资源规划设计调查数字化基本图和小班数据库。
2 研究方法 2.1 图像分割和基于分割的分类及基于分类的分割 2.1.1 图像分割方案图像分割采用当前广泛应用的商业软件Definiens ProfessionalTM 5(Baatz et al., 2000; Schieve et al., 2001; Michael et al., 2006)进行。分2次进行, 第1次分割以较大的尺度进行, 旨在通过基于规则的分类方法, 从较粗的层次上对林地、造林地、水体和主要道路进行检测和信息提取。
由于SPOT5图像和ETM+图像具有不同的光谱和空间特性, 并且ETM+图像的光谱分辨率高于SPOT5图像, 因此, 在本研究中, 采用ETM+图像作为辅助数据。根据ETM+图像参与分割过程的方式和分割参数的不同, 共实施3个分割方案, 各方案的分割参数如下:
1) 0312new方案。Weight: B1=2, B2=B3=B4=1; Scale=150; Color=0.9; Compactness=0.4。
2) noTM方案。Weight: B1=2, B2=B3=B4=1, ETM1=ETM2=ETM3=ETM4=ETM5=0; Scale=150; Color=0.9; Compactness=0.3。
3) withTM方案。Weight: B1=2, B2=B3=B4=1, ETM1=ETM2=ETM3=ETM4=ETM5=0.5; Scale=150; Color=0.9; Compactness=0.3。
以上3个方案中, 方案0312new只有SPOT5的4个图层, 后续的对象特征提取也仅包含这4个图层的信息; 方案noTM有9个图层, 包括SPOT5的4个图层和ETM+的5个图层, 但ETM+5个图层的权重全部为0, 即ETM+各图层不直接参与图像分割; 方案withTM的9个图层全部参与图像分割。
2.1.2 基于规则的分类根据前期对研究区域考察和对2004年森林资源规划设计调查材料分析所掌握的森林分布特点, 对分割后的图像对象采用基于规则的分类, 全部对象分为林地、造林地、水体和主要道路4个类型。分类的主要依据是对象光谱特征(指数、平均值、比率和标准差等)、纹理特征(同质性、异质性、熵等)和空间特征(对象长度、长宽比等)。
2.1.3 基于分类的分割通过上述分类, 主要道路和水体的分类已经完成, 因此仅对林地和造林地进行基于分类的分割(第2次分割), 不同的方案采用不同的分割参数。
1) 方案0312new 林地 Weight: B1=2, B2=B3=B4=1; Scale=50; Color=0.9; Compatness=0.3。造林地Weight: B1=2, B2=B3=B4=1; Scale=100; Color=0.9; Compactness=0.3。
2) 方案noTM 林地 Weight: B1=2, B2=B3=B4=1, TM1=TM2=TM3=TM4=TM5=0.0; Scale=50; Color=0.9; Compactness=0.3。造林地Weight: B1=2, B2=B3=B4=1, TM1=TM2=TM3=TM4=TM5=0.0, Scale=100; Color=0.9; Compactness=0.3。
3) 方案withTM 林地 Weight: B1=2; B2=B3=B4=1; TM1=TM2=TM3=TM4=TM5=0.5; Scale=50; Color=0.9; Compatness=0.3。造林地Weight: B1=2; B2=B3=B4=1; TM1=TM2=TM3=TM4=TM5=0.5, Scale=100; Color=0.9; Compatness=0.3。
2.2 对象特征提取和筛选对上述第2次分割3种方案得到的3幅图像, 分别提取每个对象的光谱和纹理特征, 对象特征包括植被指数(NDVI, RVI)、光谱特征(灰度平均值和标准差)、纹理特征[灰度共生矩阵(GLCM)同质性、反差、异质性、熵、角二阶矩、均值、标准差、相关性;灰度差向量(GLDV)角二阶矩、熵、均值、对比度]。方案0312new得到58个对象特征, 方案noTM和方案withTM各有130个对象特征。
采用协方差矩阵、简单相关性和多重相关性方法进行对象特征筛选。其方法如下:
1) 设若rij≥0.9, 且Si>Sj, 则保留第i因子, 剔除第j因子。rij为对象特征i和j的偏相关系数; Si, Sj分别为对象特征i, j的方差。
2) 对象特征xi的方差扩大因子VIFi=(1-Ri2)-1(王松桂等, 1999; 王惠文, 1999; 李崇贵等, 2005), 其中Ri2是以第i个对象特征xi为因变量, 以其他对象特征为自变量回归时的复相关系数。若
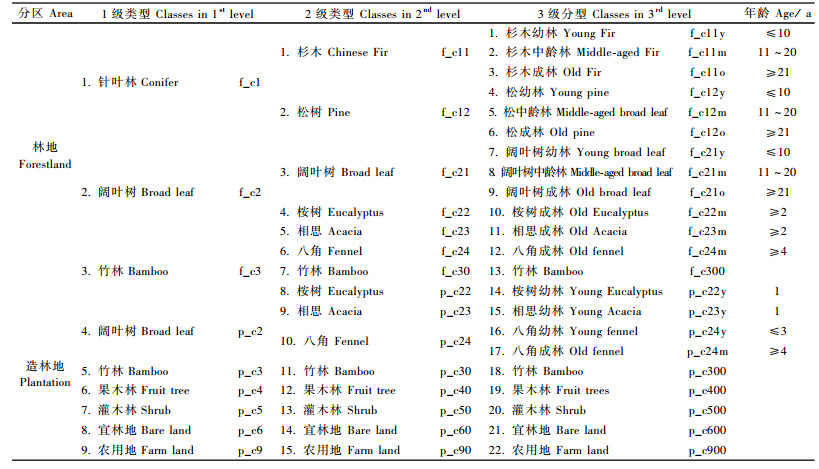
对研究区域2004年森林资源规划设计调查材料分析, 并经实地考察论证, 确定采用3级分类体系进行分类。第3级分类以龄组为基础, 共分为22个类型, 其中1~13类属于林地, 14~22类属于造林地; 第2级分类以树种为基础, 共分为15个类型, 其中1~7类属于林地, 8~15属于造林地; 第1级分类以森林类型为基础, 共分为9个类型, 其中1~3属于林地, 4~9类属于造林地。分类方案见表 1。
|
|
根据2004年森林资源规划设计调查材料, 对第2次分割得到的各试验方案图像, 以对象为单元对第3级分类的类型分别选取训练样本, 每个类型不少于20个样本。
虽然在训练样地选择过程中, 遵循了均匀、同质等一般原则, 但分析发现, 少量样地的对象特征变异太大, 故采用标准差法对训练样地进行剔除。设某类别训练样地各个对象特征的平均值为X=(x1, x2, …, xn), 标准差为Std=(std1, std2, …, stdn), 对于某一训练样本X=(x1, x, 2, …, xn), 若|xi-xi|>k·stdi, ∀i(i=1, 2, …, n), 则剔除该样本, 其中k为常数, 一般取k=2.0, 即用2倍标准差进行剔除。对于个别对象特征, 视其变异情况和样本数量的多少, 可适当增大或减小k值。
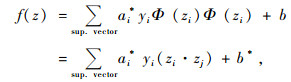
2.4 多分类器分类采用改进最小距离(Min D)、马氏距离(Mah D)、Bayes准则(最大似然法)、模糊分类(Fuzzy)、支持向量机(SVM)对图像进行分类。其中Bayes分类器表达式如下:

|
(1) |
模糊分类器的模糊隶属函数采用基于Bayes准则的确定方法(Benz et al., 2004):

|
(2) |
式中:设P′(g)为第g类出现的先验概率, Pi*(X)=


支持向量机(骆剑承等, 2002):
|
(3) |
其中核函数为k(zi, zj)=Φ(zi)·Φ(zj)。
多分类器分类仅在第3级类型中进行, 往上逐级合并得到第2级、第1级的分类结果。
2.5 分类器结合分类器结合的实质是解决待分对象中多分类器输出结果不一致的“冲突”(conflicting)问题(Fauvel et al., 2006)。在保守投票法中, 当各分类器结果不完全一致时, 就出现了“冲突”。“冲突”的解决办法有多种, 本研究采用模糊融合方法解决。将上述2种方法结合, 得到一个新的多分类器结合方法——投票/模糊法。其思路是:用保守投票法对待分对象多分类器结果的“冲突”情况进行判断, “不冲突”的对象, 其输出结果即为多分类器结合后的类型;而“冲突”的对象, 采用模糊法解决“冲突”, 得到最终的多分类器结合结果。
3 结果与分析 3.1 分割结果第1次分割后, 方案0312new、方案noTM和方案withTM得到的对象个数分别为2 813, 2 911和2 704个。对分割效果采用目视方法进行检验, 结果表明方案0312new和noTM的分割效果很好, 各对象边界都准确地反映了地物的空间分布, 对象的同质性高, 见图 1a、图 1b、图 2a和图 2c。方案withTM的对象边界与地面实体相差较大, 对象内“杂质”过多、同质性差, 见图 2b、图 2d。

|
图 1 方案noTM图像分割和基于规则分类效果 Figure 1 Result of segmentation and rule-based classification of protocol noTM |

|
图 2 分割方案noTM和withTM第1次分割结果比较 Figure 2 Comparison of first segmentation of protocol noTM and withTM |
采用基于规则的分类后, 得到各方案中各类型的对象个数如下: 1)方案0312new:林地1 366个; 造林地1 269个; 水体129个; 主要道路49个。2)方案noTM:林地1 420个; 造林地1 296个; 水体87个; 主要道路8个。3)方案withTM:林地1 278个; 造林地1 146个; 水体217个; 主要道路8个。
通过基于规则的分类, 各个方案都将水体和主要道路信息全部提取完毕, 亦即完成了水体和主要道路的分类。从图 1可以看出, 黄色的造林地和绿色的林地分界十分明显。
对图像进行基于分类的分割(第2次分割)后, 方案0312new中林地的对象个数增加至9 431个, 造林地增加至2 523个; 方案noTM中林地的对象个数增加至9 373个, 造林地增加至2 736个; 方案withTM中林地的对象个数增加至8 006个, 造林地增加至2 497个; 方案noTM的第2次分割效果见图 1d。
3.2 对象特征筛选结果经筛选后, 用于分类的对象特征个数大为减少。方案0312new的对象特征由58个减少至林地12个、造林地8个。方案noTM和方案withTM原各有130个对象特征, 筛选后只剩余13~16个特征。详见表 2。在保留的对象特征中, 光谱特征(灰度值、标准差)的个数比重较大, 但纹理特征也不少, 说明在面向对象的图像分析中, 光谱信息仍是重要的信息, 纹理信息也具有重要作用。在众多纹理特征中, 主要保留GLCM反差和标准差特征, 其余大部分纹理特征由于方差较小或者存在相关性, 在筛选过程中被予以剔除。
|
|
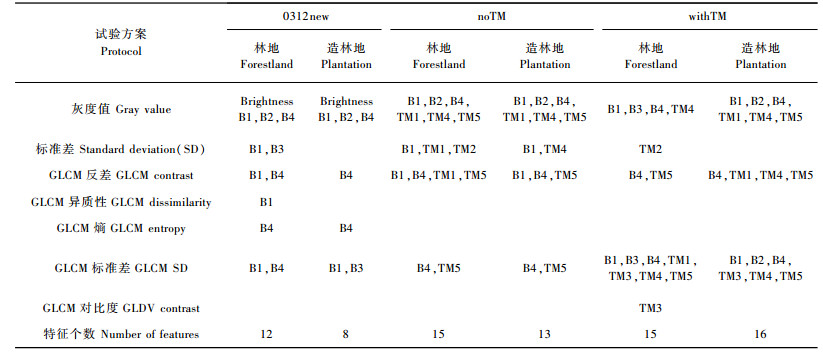
由表 2还可以看出, 在筛选后用于分类的对象特征中, 方案0312new全部为SPOT5图像的信息, 方案noTM和withTM不仅包含SPOT5图像的信息, 而且ETM+图像信息占了很大比重。
3.3 多分类器分类结果采用5个分类器对3个分割方案得到的图像进行分类, 结果如表 3所示。从总体分类精度来看, 方案noTM的最高, 其次是方案withTM, 方案0312new最低, 说明Landsat7 ETM+数据作为辅助数据, 有助于改善SPOT5图像的分类精度。
|
|

在5个分类器中, Bayes分类器的表现最好, 一是总体分类精度最高, 二是各类型的生产者精度均保持在较高水平, 变动幅度最小。方案noTM的各分类器第3级分类的生产者精度详见表 4。
|
|
采用投票/模糊法进行分类器结合后, 方案noTM第3级分类的总体精度和Kappa系数分别为79.60%和78.12%, 略高于单个分类器中总体精度最高的Bayes分类器, 但提高的幅度很小, 即多分类器结合的效果不明显。从生产者精度来看, 分类器结合后各类型生产者精度变动有所减小, 但效果亦不明显, 见表 4。这个结果与一些研究者得到的结论相差较大, 在他们的研究中, 多分类器结合后总体分类精度显著提高(柏延臣等, 2005; 张秀英等, 2007)。其可能的原因是本研究区域较大, 所分类型较多且地表特性相近。
4 讨论 4.1 分割策略图像分割是为了得到图像对象, 在面向对象的遥感图像自动或半自动分析中, 一般采用多尺度分割(multi-resolution segmentation)。在多尺度分割中, 用户通过指定输入数据、给定输入数据的权重、定义影响输出结果的图像对象大小、光谱同质性、空间同质性、形状参数, 控制分割过程的输出。在此过程中, 像元合并为小的对象, 重复此过程, 小的对象逐渐地合并成大的对象, 并保持结果图像中对象异质性的最小化, 直至满足用户定义的目标为止(Baatz et al., 2000)。
本研究中, 图像分割分2次进行。第1次分割的目的是在较大尺度和较粗层次上, 对研究区域进行分类, 为后面进一步的、精细的分割和分类奠定基础。因此分割尺度较大, 主要根据土地利用/覆盖的宏观特征, 将研究区域分割为林地、造林地、水体和主要道路。此处的“林地”是指林木覆盖度较高的林地; 而“造林地”除包含宜林地外, 还包含林木稀疏、覆盖度较低、土壤祼露的经济林木和新造林地, 也即不是严格的造林地。由于第1次分割得到的图像经过基于规则的分类后, 水体和主要道路已经全部提取完毕, 因此, 第2次分割只针对林地和造林地。由于林地和造林地的内部构成不同, 结构不一致, 如林地内包含的类型较多、空间分布交错、结构复杂, 造林地内包含的类型相对较少、同质斑块较大、结构相对简单, 因此, 在第2次分割中, 两者采用不同的分割参数, 林地的分割尺度较小, 造林地的分割尺度较大。
不同的分割方案得到的效果不同。在方案noTM中, 虽然ETM+图像加入了分割过程, 但由于其权重值被设置为0, 因此其图像信息并未对分割结果产生影响, 分割效果与未加入ETM+图像的方案0312new极为接近。在方案withTM中, ETM+图像5个波段的权重均为0.5, 亦即ETM+图像信息实质性地参与了分割过程, 对分割结果产生了影响。虽然方案noTM和方案withTM除了ETM+权重不同外, 其余分割参数完全相同, 但效果却差别很大。方案noTM所得到的对象边界更符合地面覆盖特点, 对象同质性高, “杂质”少; 而方案withTM所得的对象中, 边界走向与地面实体相差较大, 对象内“杂质”多, 同质性差。
产生上述现象的原因, 主要是ETM+图像的空间分辨率太低, 难以准确地表现研究区域破碎的森林分布状况。SPOT5图像空间分辨率较高, 能够准确地表现研究区域的森林分布状况。当ETM+图层的权重不为0时, 分割过程不但受到SPOT5图像信息的影响, 也受到ETM+图像信息的影响, 在2种信息的共同作用下, 所得到对象的边界自然地会“照顾”ETM+图像信息的影响, 而不能很好地反映尺度较小的地物空间情况, 造成边界走向不准确, 对象同质性差。
上述也说明了ETM+图像不宜单独用于研究区域的森林分类和分析。
4.2 对象特征筛选方法一般来说少量特征很难全面地表述出一个类别的本质特征, 但随着特征个数的增加, 可能出现: 1)对象特征之间存在相关性, 协方差矩阵为病态矩阵;2)特征维数过高会影响分类器运行的稳定性和速度, 降低分类精度(Price et al., 2002; Yu et al., 2006), 因此需要进行对象特征筛选。
关于对象特征筛选方法的研究, 已经做了大量的研究工作, 提出了很多先进的方法, 如主成分分析、最小噪声分数变换(minimum noise fraction transform)、判别分析、决策边界特征提取(decision boundary feature extraction)、非参数权重提取(non-parametric weighted extraction)、小波变换、光谱混合分析等(Okin et al., 2001; Asner et al., 2002; Neville et al., 2003; Platt et al., 2004)。本文采用对象特征间的简单相关性和多重相关性2步筛选方法, 先通过相关矩阵进行简单相关性筛选, 然后再作多重相关性筛选。这种方法具有如下特点: 1)筛选后的对象特征保持原有含义不变, 具有明确的定义;2)保留的对象特征间相互独立, 已不存在紧密的相关关系, 可用于各种参数分类器;3)方法简单, 运行时间短。
4.3 分类策略本研究采用了分区控制、分层分类的技术路线(刘顺喜, 2005)。具体实现方法是分区控制-底层(第3级)分类-逐层(第2, 1层)向上合并。
通过基于规则的分类后, 全部待分对象分属于林地和造林地两大类型。此时, 分别这两大类型制定分类方案、选择训练样地和筛选分类用对象特征, 因此在分类过程中, 不同对象分类采用的特征不同。如方案noTM中, 林地分类采用15个对象特征, 而造林地只采用13个对象特征。林地和造林地各类型均采用独立的训练样本, 尽管采用同一个分类器、同一计算程序, 但分类过程是相对独立的, 均在林地和造林地2个大类别的控制下进行。如林地内各类型与造林地内各类型间, 尽管有八角成林和竹林2个类型重叠, 但在分类过程中, 这2个类型分别采用2套独立的训练样本, 独立地进行运算。
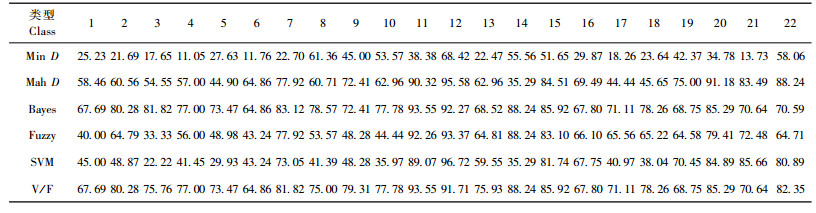
上述分类路线的特点是思路清晰, 所有对象在分类过程中, 根据其林地/造林地属性, 指派到林地/造林地所属的各类型中去, 不会出现类型交叉的现象, 分类结果保留对象原有的林地/造林地属性。此外, 这种方法充分考虑了分属于林地、造林地, 但实际上是相同类型的对象在对象特征上的差异, 有利于提高分类精度。如f_c24m和p_c24m在分类过程中属于不同的类型, 前者属于林地, 后者属于造林地, 但实际上这2个类型均为“八角成林”。考察这2个类型的对象特征统计量, 差别十分明显, 见表 5。实际上, f_c24m和p_c24m虽同为“八角成林”, 但其林龄是不同的, 前者为“高龄”成林, 冠幅大, 郁闭度高, 林地反射率低; 后者是“低龄”林分, 冠幅小, 郁闭度小, 林地反射率高, 图像特征近似祼露土地。
|
|

显然, 采用本研究的分类方法, 有利于将图像特征相近的对象分为一类, 达到提高精度的目的, 否则, 若将2个类型合并, 由于其图像特征变异太大, 容易造成混淆, 降低分类精度。
由于形态特征上相同的地物要分为2个不同的类型, 本分类方法需要2套训练样地, 因此工作量增大, 分类器运行耗时亦相应增加。
在初期的预研究中, 试验了森林类型分类(第1级)-树种分类(第2级)-龄组分类(第3级)和树种分类(第2级)-龄组分类(第3级)的从上而下逐层分类的技术路线, 但效果不佳。其主要原因是由于同一树种内由于林龄变化从1至30年甚至更大, 树高、冠幅不同, 郁闭度相差很大, 因此反射特性相差很大, 造成相同树种各对象间的特征变动过大, 容易与特征相近的树种混淆。统计结果表明(表 6):杉木(f_c11)和松树(f_c12)各对象特征的平均数十分接近, 且标准差都很大, 很难将这2个类型进行有效分离, 其他树种间亦存在这种现象。因此, 在本研究中, 分类直接且只在第3级上进行, 第2、第1级类型均通过第3级分类结果逐级向上合并而得。
|
|

在3个方案中, 方案0312new只有SPOT5图像的4个图层, 所提取的对象特征仅限于SPOT5图像的光谱和纹理信息; 在方案noTM中, 虽然加入了ETM+的5个图层, 但其权重均为0, 故ETM+图像在分割过程中只是“旁观者”, 没有实质参与分割过程, 对分割结果不造成影响, 所提取的对象特征中包含了SPOT5和ETM+图像的光谱和纹理信息。在方案withTM中, ETM+5个图层的权重均为0.5, ETM+图像真正地加入了分割过程, 对分割结果产生了一定的影响, 所提取的对象特征中包含了SPOT5和ETM+图像的光谱和纹理信息。
实施3种图像分割和对象特征提取方案的目的是探讨ETM+图像对SPOT5图像分类结果的影响。结果表明:在5个分类器中, 方案noTM的总体方案分类精度均高于其余2个方案。3个方案Bayes分类器的生产者精度如图 3所示。

|
图 3 不同方案第3级各类型Bayes分类器的生产者精度 Figure 3 Comparison by producer accuracy in 3rd level of three protocols by Bayes classifier |
在所有分类器中, 方案0312new的分类精度低于其余2个方案, 该方案中用于分类的信息只有SPOT5图像的信息, 其余2个方案中不但使用了SPOT5图像的信息, 而且也使用了ETM+图像的信息, 因此方案0312new中可用的信息量小于其余2个方案, 分类精度低就不足为奇了, 这从另一方面说明了ETM+数据作为辅助数据, 增加了可用信息量, 有利于提高SPOT5图像的分类精度。
对方案noTM和withTM的对象特征进行统计分析, 结果表明: 1)方案withTM中训练样本各类型的对象特征变动系数(标准差/均值)都大于方案noTM, 说明方案withTM中对象的同质性小于方案noTM;2)方案noTM中各类型间的空间距离(欧氏距离)都大于方案withTM, 说明方案noTM中各类型间的差异大于方案withTM。由此, 不难说明方案noTM的分类精度为何高于方案withTM。造成这种现象的原因是在方案noTM中, ETM+图像实际上不影响分割结果, 所得到的对象边界准确, 确保了对象中SPOT5图层信息是“纯化”的, 变异较小, 且ETM+图层信息又加入分类过程, 因此分类精度较高, 而在方案withTM中, ETM+图像影响了分割结果, 所得对象同质性差, 对象特征变动太大。
上述说明了ETM+图像作为辅助数据, 对提高SPOT5图像的分类精度有较大帮助, 另一方面, 科学合理地利用ETM+图像也十分重要。
5 结论1) 通过较大尺度的图像分割, 采用基于规则的分类, 可以完成水体和主要道路信息的提取, 在此基础上对林地和造林地施行进一步的、尺度较小的分割, 得到异质性较小的对象, 为林地和造林地的信息提取奠定基础。这种大尺度分割-基于规则的分类-基于分类的分割策略, 可以根据不同土地类型的覆盖特性, 有针对性地采用不同的信息提取方法, 提高工作效率和信息提取精度。
2) 采用分区控制-底层分类-逐级合并的技术路线, 采用多分类器进行分类, 结果表明:总体精度最高的Bayes分类器, 对以龄组为基础的22个类型分类的总体分类精度达到了79.38%, 以树种为基础的15个类型的总体精分类度达到了81.82%, 以树种组为基础的9个类型的总体分类精度达到了86.33%。在森林分布破碎、种类和类型多样、结构复杂的南方人工林区, 这是比较满意的结果。
3) 在景观复杂地区的森林自动化分层分类中, 由底层分类开始、逐层向上合并的方法, 比由顶层分类开始、往下逐层分类的方法效果更好。
4) ETM+作为辅助数据, 较大程度地提高了SPOT5图像的分类精度; 但ETM+图像不能实质性参与分割过程, 只能用于提取信息, 否则, 由于分割后得到的对象的边界不准确, 对象的光谱、纹理等特征变异大, 从而降低分类精度。
包盈智, 赵宪文, 袁凯先, 等. 1996. 卫星数据用于森林资源二类调查的效益评估和分析[J]. 林业资源管理, (5): 67-70. |
柏延臣, 王劲峰. 2005. 结合多分类器的遥感专题数据专题分类方法研究[J]. 遥感学报, 9(5): 555-563. |
冯仲科, 游先祥, 任谊群. 2001. 基于3S的森林资源与环境监测系统构想[J]. 北京林业大学学报, 23(4): 90-92. |
寇文正, 肖燕, 张瑞玺. 1990. 应用遥感技术进行森林资源监测方法的研究[J]. 环境遥感, 5(2): 102-109. |
李崇贵, 赵宪文, 李春干. 2005. 森林蓄积量遥感估测理论与实现[M]. 北京: 科学出版社.
|
李春干, 谭必增. 2004. 基于GIS的森林资源遥感调查方法研究[J]. 林业科学, 40(4): 40-45. DOI:10.11707/j.1001-7488.20040407 |
李春干, 代华兵, 李崇贵. 2006. 基于高分辨率卫星图像的小班勾绘精度检验[J]. 福建林学院学报, 26(2): 127-130. |
刘顺喜, 张定祥, 尤淑撑, 等. 2005. 分区控制和分层提取下的OMIS-I影像土地利用/覆盖分类方法研究[J]. 地理与地理信息科学, 21(5): 28-32. |
骆剑承, 周成虎, 梁怡, 等. 2002. 支撑向量机及其遥感影像空间特征提取和分类的应用研究[J]. 遥感学报, 6(1): 50-55. DOI:10.11834/jrs.20020110 |
唐守正, 陈永富. 2006. 关于森林资源监测体系改革的一些思考//森林可持续经营探索与实践[M]. 北京: 中国林业出版社: 27-32.
|
王惠文. 1999. 偏最小二乘回归方法及其应用[M]. 北京: 国防工业出版社.
|
王松桂, 陈敏, 陈立萍. 1999. 线性统计模型线性回归与方差分析[M]. 北京: 高等教育出版社.
|
徐冠华. 1994. 三北防护林地区再生资源遥感的理论及其技术应用[M]. 北京: 中国林业出版社.
|
张秀英, 冯学智, 刘伟. 2007. 基于多分类器结合的IKONOS影像城市植被类型识别[J]. 东南大学学报:自然科学版, 37(3): 399-403. |
赵宪文, 李崇贵, 斯林, 等. 2001a. 森林资源遥感估测的重要进展[J]. 中国工程科学, 3(8): 15-28. |
赵宪文, 李崇贵. 2001b. 基于"3S"的森林资源定量估测——原理、方法、应用及软件实现[M]. 北京: 中国科学技术出版社.
|
赵宪文, 李崇贵, 斯林, 等. 2002. 基于信息技术的森林资源调查新体系[J]. 北京林业大学学报, 24(5/6): 147-155. |
Asner G P, Heidebrecht K B. 2002. Spectral unmixing of vegetation, soil and dry carbon cover in arid regions: comparing multispectral and hyperspectral observations[J]. International Journal of Remote Sensing, 23: 3939-3958. DOI:10.1080/01431160110115960 |
Baatz M, Schäpe A. 2000. Multi-resolution segmentation: an optimization approach for high quality multi-scale image segmentation[J]. Proceedings of Angewandte Geographische Informations Verarbeitung (AGIT) XII, Salzburg, Austria, Wichmann Verlag: 12-23. |
Benz U C, Hofmann P, Willhauck G, et al. 2004. Multi-resolution object-oriented fuzzy analysis of remote sensing data for GIS-ready information[J]. ISPRS Journal of Photogrammetry & Remote Sensing, 58: 239-258. |
Fauvel M, Chanussot J, Benediktsson J A. 2006. Decision fusion for the classification of urban remote sensing images[J]. IEEE Transactions on Geoscience and Remote Sensing, 44(10): 2828-2838. DOI:10.1109/TGRS.2006.876708 |
Janz K. 1993. World forest resources assessment 1990: an overview[J]. Unasylva, 44(174): 1-15. |
Kohl M. 2004. Forest inventory and monitoring[J]. Encyclopedia of Forest Science: 403-409. |
Korotkov A V, Peck T J. 1993. Forest resources of the industrialized countries: An ECE/FAO assessment[J]. Unasylva, 44(174): 1-31. |
Michael A W, Werner A K, Mark G. 2004. National level forest monitoring and modeling in Canada[J]. Progress in Planning, 61: 365-381. DOI:10.1016/S0305-9006(03)00069-2 |
Michael S C, Steven E F, Michael A W. 2006. Object-based analysis of Ikonos-2 imagery for extraction of forest inventory parameters[J]. Photogrammetric Engineering & Remote Sensing, 72(4): 383-394. |
Neville R A, Levesque J, Suene K, et al. 2003. Spectral unmixing of hyperspectral imagery for mineral exploration: comparison of results from SFSI and AVIRIS[J]. Canadian Journal of Remote Sensing, 29: 99-110. DOI:10.5589/m02-085 |
Okin G S, Roberts D A, Murray B, et al. 2001. Practical limits on hyperspectral vegetation discrimination in arid and semiarid environments[J]. Remote Sensing of Environment, 77: 212-225. DOI:10.1016/S0034-4257(01)00207-3 |
Platt RV, Goetz A F H. 2004. A comparison of AVIRIS and Landsat for land use classification at the urban fringe[J]. Photogrammetric Engineering and Remote Sensing, 70: 813-819. DOI:10.14358/PERS.70.7.813 |
Price K P, Guo X, Stiles J M. 2002. Optimal Landsat TM band combinations and vegetation indices for discrimination of six grassland types in eastern Kansas[J]. International Journal of Remote Sensing, 23: 5031-5042. DOI:10.1080/01431160210121764 |
Reese H, Nilsson M, Pahlen T G, et al. 2003. Countrywide estimates of forest variables using satellite data and field data from the national forest inventory[J]. Ambio, 32(8): 542-548. DOI:10.1579/0044-7447-32.8.542 |
Schieve J, Tufte L, Ehlers M. 2001. Potential and problems of multi-scale segmentation methods in remote sensing[J]. GeoBIT/GIS 6: 34-39. |
Sievanen T. 2004. Inventory, monitoring and management[J]. Encyclopedia of Forest Science: 958-964. |
Smith W B. 2002. Forest inventory and analysis: a national inventory and monitoring program[J]. Environmental Pollution, 116(suppl 1): S233-S242. |
Tomppo E, Czaplewski R L. 2002. Potential for a remote-sensing-aided forest resource survey for the whole globe[J]. Unasylva, 53(210): 16-18. |
Yu Q, Gong P, Clinton N, et al. 2006. Object-based detailed vegetation classification with airborne high spatoal resolution remote sensing imagery[J]. Photogrammetric Engineering and Remote Sensing, 72(7): 799-811. DOI:10.14358/PERS.72.7.799 |