 2009, Vol. 45
2009, Vol. 45文章信息
- 赵峰, 庞勇, 李增元, 张怀清, 丰伟, 刘清旺.
- Zhao Feng, Pang Yong, Li Zengyun, Zhang Huaiqing, Feng Wei, Liu Qingwang
- 机载激光雷达和航空数码影像单木树高提取
- Extraction of Individual Tree Height Using a Combination of Aerial Digital Camera Imagery and LiDAR
- 林业科学, 2009, 45(10): 81-87.
- Scientia Silvae Sinicae, 2009, 45(10): 81-87.
-
文章历史
- 收稿日期:2008-05-12
-
作者相关文章


2. 山东省曲阜市林业局 曲阜 273100
2. Forestry Bureau of Qufu, Shandong Province Qufu 273100
激光雷达(light detection and ranging, LiDAR)技术用于森林参数提取是当前研究的热点之一,它通过主动获取三维坐标信息,可以直接测量森林参数和估测森林结构特征,如树高、冠层高度、冠径、地径、地上生物量、冠层覆盖率、林木密度、蓄积量和垂直结构等信息(Maltamo et al., 2004;Naesset et al., 2001;Means et al., 2000)。传统的光学遥感技术仅能提供林木的二维信息,需要借助其他辅助信息才能获得其三维结构参数(Wulder, 1998)。激光雷达在林业中应用最广泛的是树高的获取,而且在国外已经取得了很好的进展(St-Onge, 2000;Ritchie et al., 1993;Magnussen et al., 1999;Koukoulas et al., 2004)。国内在激光雷达林业应用领域的研究刚刚起步, 相关研究较少。庞勇等(2005;2008)针对星载记录完整波形数据的大光斑激光雷达系统和机载记录离散回波的激光雷达数据用于林分水平的森林高度估计;杨海全等(2006)提出一种在缺乏其他辅助数据的情况下,基于知识的辅助,直接从激光雷达扫描数据中进行地物提取的方法。关于激光雷达数据用于单株木参数的研究非常少,因此,本研究以山东泰安徂徕山林场为试验区,用LiDAR数据和航空数码影像相结合进行单株木水平的树高估测研究,为今后LiDAR数据用于单株木参数的提取提供一定的参考。
1 试验区概况试验区选在山东省泰安市徂徕山林场,地理位置位于117°16′—117°20′E, 36°02′—36°07′N。徂徕山属鲁中山区,位于泰沂山脉南侧,孤立于平原,主峰海拔1 028 m。全场林业用地面积70%以上位于700 m以下的山区。山区大部分土壤属普通棕壤,有少部分粗骨棕壤,平原河滩主要为沉积沙土,以无石灰性潮土为主。徂徕山区属暖温带大陆性气候区,年降雨量约718 mm,多集中在夏秋之间。
徂徕山林场现有森林多为人工林,少数为天然次生林和第二代萌芽更新的刺槐(Robinia pseudoacacia)林。树种以刺槐、油松(Pinus tabulaeformis)、黑松(Pinus thunbergii)为主,其次为侧柏(Platycladus orientalis)、落叶松(Larix gmelinii)、毛白杨(Populus tomentosa)等。据2000年徂徕山林场森林经理调查,林场纯林多,混交林少,林龄集中;林分大多数为中龄林、近熟林、成熟林,约占林分总面积的70.5%。其中,中龄林、近熟林以刺槐和部分松类为主,成熟林以松类为主,过熟林大部分为刺槐林,成熟林和过熟林自然枯损严重。
2 数据与方法 2.1 研究数据研究采用的LiDAR数据是由RIEGL LMS-Q280i获取的离散回波数据,飞行平台为“运-5”飞机,飞行地速180km·h-1,飞行相对航高800 m,绝对航高1600m。数据获取时间是2005年5月13日。激光数据采用首回波记录模式,激光点平均间隔约1.6m,激光束发散度为0.5m·rad,激光扫描角60°,激光扫描重叠程度为22%。
航空影像是由DCS22(Digital Camera System 22Mega)数码航空摄影测量系统获取的高分辨率、真彩色数码影像,与激光雷达数据同步获取。影像地面分辨率为25?cm,航向重叠度40%,旁向重叠度30%。
在飞行获取激光雷达数据和数码相机影像数据的同时进行外业实地调查。根据林分类型、树龄、郁闭度、地形等因素,代表性地选择一些样地,并对每个样地进行每木检尺,包括样地内每株树木的胸径、树高、冠幅,并对样地中心和单株树利用Trimble GPS(4600和Geo XT)进行差分定位。另外,为了更为全面准确地了解徂徕山林场森林资源状况,在当地林业部门收集了一些相关资料,包括林场森林经营方案、林场森林资源现状图、林相图(1:5万)等。
2.2 研究方法研究的技术流程见图 1。

|
图 1 研究的技术流程 Figure 1 The technique flow of the research |
LiDAR数据是在三维空间中呈不规则分布的点集,在三维空间的分布形态呈现离散的数据“点云”。在这些点中,有些点位于真实地形表面,有些点位于人工建筑物或自然植被(树、灌木、草)。因此,需要对激光点进行滤波和分类以获得纯地面的激光回波点和来自植被的回波点。激光点云数据的滤波算法基于邻近激光点间的高程突变(局部不连续),并根据地形、建筑、树木的高程变化形态对激光点进行分类。目前已经有不少国内外学者研究了激光点云数据的滤波和分类算法,如(分级的)稳健的线性表面预测滤波算法(HRF)、基于动态表面拟合的滤波算法(ASF)、基于坡度的形态学滤波算法、TIN三角网逐步加密算法、移动窗口法、迭代线性最小二乘内插法等。激光点数据根据自然界复杂的情况而呈现出不规则的分布形态,因此,激光点云滤波要针对不同的地形,采用不同的算法。本研究主要采用不规则三角网的Tin Filter,Polynomial Filter等算法进行点云滤波和分类。下面主要介绍TIN算法的基本原理(Axelsson, 2001)。
首先以粗放的尺度寻找“地表点”,并根据这些“地表点”建立粗尺度的TIN网格表面。然后逐一判断其余的三维点与TIN表面的垂直距离及角度,当距离与角度小于一定阈值时,就将该点纳入并重新生成新的TIN表面,否则就将该点删除。重复该过程,直至所有点判断完成。TIN算法是从粗放到精细的过程,等效于三角网的逐步加密,它直接基于DEM表面进行滤波(图 2)。

|
图 2 TIN三角网逐步加密算法示意 Figure 2 Sketch map of progressive TIN-densification d,α,β,γ 等参数阈值的设置直接影响到生成DEM的精度,对于不同的地形条件,参数阈值需要重新设置。 The threshold of the parameter, such as d, α, β, γ etc., can affect the precision of DEM directly. The parameter threshold should be reset for the different topographic conditions. |
由于研究对象是树木,因此将试验区的激光点云的数据分为4类:地面点、树木点、噪声点和其他点,地物类型划分简单,滤波和分类同时进行。研究首先用阈值法滤掉高程异常点(噪声点),如高程值为负值的点,并去除航带重叠区域的激光点数据,然后采用Tin Filter算法进行分类,并对自动分类后的激光数据进行人工编辑,分类结果如图 3所示。由于研究数据仅记录1个回波,且数据点密度不高,因此,点云分类过程中不需要考虑点数据抽稀以降低密度或滤波掉某一回波的数据等。

|
图 3 分类后的激光点云 Figure 3 The classified LiDAR point clouds |
通过对影像进行多尺度分割生成多边形对象,然后以影像对象为信息提取基本单元,运用模糊数学分类方法实现类别信息的自动提取。在多尺度分割过程中,最重要的是类别提取最优分割尺度的选择,最优分割尺度是针对一种类别而言的。因此,根据不同的提取对象分别选择不同水平的最优分割尺度,该过程是在eCognition软件中完成的。影像分割综合考虑光谱和形状因素,形状因子又分为光滑度和紧致度,根据目标对象设置不同的权重。类别信息提取主要采用最邻近距离法和成员函数法,前者选取样本再分类,后者通过建立规则模型进行分类。
首先需要将植被信息完整地提取出来,并将其作为一个整体多边形,为下一步的树冠信息提取做准备。因此,在第1次分割时采用较小的分割尺度,且以光谱因子的权重(0.9)为主的参数设置,分割过程中影像3个图层(红、绿、蓝)的权重值均为1。然后用单波段阈值法进行植被信息提取,并对植被多边形进行基于类的合并(merge), 即将所有被分为植被的影像对象重新合并为一个对象,以便于进一步再分割。由于郁闭度的不同,树冠间都会存在或大或小的间隙,间隙有的是空地,有的则是林下的灌木或杂草等,这些灌木和杂草也被当作植被信息进行提取。因此,要获得单株乔木树冠的多边形,需要将这些信息剔除。研究对其特征与属性相关性分析,确定用相邻像素对比度的属性进行成员函数设置,去除树冠间的灌木和杂草信息,并进行影像分割,分割过程只针对已经提取的植被类进行。
对提取后的树冠多边形重新进行基于类的合并,并对树冠进行再分割以提取单株树冠多边形。由于冠形对分割对象的影响较大,因此在对树冠进行分割时,形状因子的权重尽量大,且紧致度因子的权重一般也较高。该水平的分割过程中异质性因子的参数设置为:光谱因子的权重为0.6,形状因子的权重值为0.4,其中光滑度为0.2,紧致度为0.8。尺度参数根据不同树种的树冠形状不同分别设置。另外,通过对尺度参数进行分析确定邻近对象的光谱关系,计算各种可能的尺度参数,取最常见值作为下次分割参数,以最大限度地代表局部同质性。
在边缘提取过程中有部分树冠信息过提取为边缘,因此,需要对提取后的边缘进行后处理,如树冠内由于光谱差异而被错提为边缘的细碎多边形需要剔除。通过面积筛选法,即设置多边形面积阈值,将小多边形提取出来,然后通过类别合并,将其合并到树冠类中。同时采用Relative border to(相对边界)特征属性将与树冠对象的相对边界大的影像对象融合到树冠类中。最后用最近邻分类法进行树种分类,并对漏分或错分的树冠多边形进行手动编辑,得到分树种的树冠分割图及不同分割尺度(level)的分类结构如图 4所示。

|
图 4 不同树种的树冠分割和分类结构 Figure 4 The crown segmentation of different tress (a) and the hierarchy of classification(b) |
单株木的树高估测首先以单株木的正确识别为前提,其计算方法有多种,如在已识别的树冠多边形内用LiDAR数据最大高程差估测树高(Koukoulas et al., 2005),用树木模型计算得到的树高作为估测树高(McCombs et al., 2003),用窗口搜索法识别树高峰值(Holmgren et al., 2003a)等。由于受激光点云密度的影响,会存在LiDAR数据错失树冠顶部的现象,但是通过对大量实测数据和最大高程差数据的对比分析,可以看出二者存在一定的相关性。因此,本研究通过将高程归一化的植被回波点和影像分割后得到的树冠多边形进行叠加,计算多边形内的LiDAR数据最大高程差值,与实测树高进行相关分析,绘制散点图,进行单木树高反演和精度评价。
根据DGPS测量的外业样地位置,并对照高空间分辨率的航空数码影像,依次对单株树进行编号,并用测高器量测树高。研究从33块样地中选出159株树木作为训练样本,树种包括:刺槐、麻栎(Quercus acutissima)、油松、落叶松和赤杨(Alnus japonica),另选取30株作为检验样本。对159株树木进行LiDAR数据最大高程差和实测树高的相关分析,绘制散点图(图 5),计算得出二者的相关系数为0.639,从散点图中也可以看出最大高程差和实测值之间存在线性相关性。因此,对二者进行回归分析,并建立回归方程如下:

|

|
图 5 LiDAR最大高程差值和实测树高的散点 Figure 5 Scatter-plot between the max height difference of LiDAR and ground measured tree height |
用建立的上述回归方程对30株检验树木进行树高反演,反演树高与实测树高的比较如图 6所示。

|
图 6 实测树高与LiDAR反演树高比较 Figure 6 Tree height comparison between ground measured and LiDAR inversed |
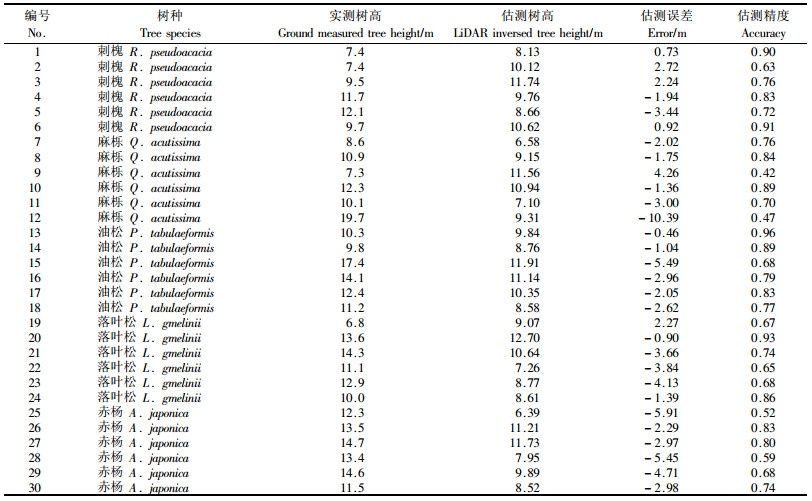
利用建立的激光雷达单株树高反演方程进行树高反演,对30株检验样本的树高反演结果如表 1所示。对估测误差的绝对值进行频率统计,如图 7所示。
|
|

|
图 7 单株树高估测误差频率分布 Figure 7 Distribution of single tree height error frequency |
从表 1可以看出,大多数估测树高均低于实测树高,估测精度最低为42%,最高达到96%,全部检验样本的总体平均精度为74.89%。其中,估测精度低于60%的有4株,占总数的13.3%。从树高估测误差频率分布图(图 7)中可以看出,几乎1/3的估测误差集中在2~3 m之间,近1/3的估测误差大于3 m,误差小于1 m的树木仅有4株,平均估测误差为3 m。其中,刺槐的平均估测误差最低,分析发现刺槐林分密度较大,树冠间隙小,激光回波点大都来自树冠层。而出现估测误差较大的12号树木,由于林分密度稀疏,而且林下灌木较多,容易将灌木层的回波点和乔木层的回波点混淆,从而估测值偏低。由于大部分激光点都不会直接来自树顶的反射,而且研究区使用的LiDAR数据点云密度较低(每平方米<0.35点),因此,大部分的估测树高均低于实测树高。在获取LiDAR数据时随着扫描角度的增大LiDAR的高程测量误差也增大,有研究建议扫描角最好不大于20°(即±10°)(Holmgren et al., 2003b)。本研究所用的LiDAR数据在获取时扫描角度为60°,LiDAR高程测量误差增加,从而影响树高估测精度。本研究中数码影像分割得到的单株树冠提取的精度也直接决定了树高的估测精度。
4 结论与讨论1) 激光点云滤波和分类是LiDAR数据处理过程的关键。滤波是为了提取数字高程模型,而分类则是提取不同类型的地物点,以进一步进行参数反演。研究根据林区激光点云数据的特点提出了点云分类的基本策略和针对不同地物的滤波算法,认为Tin Filter算法对提取植被回波点效果较好;Polynomial Filter算法主要用于过滤房屋或桥梁等建筑物数据,也可以对低矮的灌木等进行滤波;点云数据的任何一种自动滤波算法均不能完全达到分类精度要求,分类后的人工编辑是必不可少的。
2) 研究采用面向对象、分树种树冠分割的方法进行单株木的识别简单易操作,灵活性高,LiDAR数据估测的单木树高总体平均精度可达到74.89%。因此,低点云密度的LiDAR数据结合高空间分辨率的真彩色影像也可以进行单株木水平的参数反演。
3) LiDAR数据的正确分类是准确反演森林参数的前提。由于LiDAR数据本身具有一定的盲目性,很难用一种滤波算法达到满意的分类效果,尤其是郁闭度较大的林区。因此,在实现有效的滤波算法的基础上,利用更多的辅助信息进行分类是必要的,如结合多光谱影像数据、GIS数据等,可以提高数据滤波的准确性,改善分类效果。
4) 单株木识别的分割算法有待进一步研究。现有的单木树高估测方法多是通过探测树冠顶部推算最大高程值来估算树高。但是由于很难保证树顶处都会有激光回波,尤其是针叶树种,因此LiDAR数据估测树高会存在一定误差。而且由于存在单株树多个树冠和树冠重叠现象,从而增加了树高估测的难度。因此,根据林分属性调整参数的分割算法可能会对单木提取的结果有所改善。而且树种不同树冠形状不同,也应采用不同的分割方法。
随着LiDAR技术的不断发展和数据处理算法的不断完善,对于高密度、多回波数的激光点云数据,可以利用LiDAR数据构建较为理想的三维虚拟现实系统,并在此基础上进行更为精细的森林参数分析,如树高、材积、胸高断面积、生物量以及株数密度等,进一步的研究和应用将可获得理想的结果。
庞勇, 李增元, 陈尔学, 等. 2005. 激光雷达技术及其在林业上的应用[J]. 林业科学, 41(3): 129-136. DOI:10.3321/j.issn:1001-7488.2005.03.022 |
庞勇, 赵峰, 李增元, 等. 2008. 机载激光雷达平均树高提取研究[J]. 遥感学报, 12(1): 152-158. |
杨海全, 余洁, 秦昆, 等. 2006. 基于知识的LiDAR数据地物提取研究[J]. 测绘通报, 12: 9-11. |
Axelsson P. 2001. Ground estimation of laser data using adaptive TIN models(C). Proceedings of OEEPE Workshop on Airborne Laserscanning and Interferometric SAR for Detailed Digital Elevation Models, 185-208.
|
Holmgren J, Nilsson M, Olsson H. 2003a. Estimation of tree height and stem volume on plots using airborne laser scanning[J]. Forest Science, 49: 419-428. |
Holmgren J, Nilsson M, Olsson H. 2003b. Simulating the effects of LIDAR scanning angle for estimation of mean tree height and canopy closure[J]. Canadian Journal of Remote Sensing, 29(5): 623-632. DOI:10.5589/m03-030 |
Koukoulas S, Blackburn G A. 2005. Mapping individual tree location, height and species in broadleaved deciduous forest using airborne LiDAR and multi-spectral remotely sensed data[J]. International Journal of Remote Sonsing, 26(3): 431-455. DOI:10.1080/0143116042000298289 |
Koukoulas S, Blackburn G A. 2004. Quantifying the spatial properties of forest canopy gaps using LiDAR imagery and GIS[J]. International Journal of Remote Sensing, 25(15): 3049-3072. DOI:10.1080/01431160310001657786 |
Magnussen S, Eggermont P, LaRiccia V N. 1999. Recovering tree heights from airborne laser scanner data[J]. Forest Science, 45: 407-422. |
Maltamo M, Eerikainen K, Pitkanen J, et al. 2004. Estimation of timber volume and stem density based on scanning laser altimetry and expected tree size distribution functions[J]. Remote Sensing of Environment, 90: 319-330. DOI:10.1016/j.rse.2004.01.006 |
McCombs J W, Roberts S D, Evans D L. 2003. Influence of fusing LiDAR and multis pectral imagery on remotely sensed estimates of stand density and mean tree height in a managed loblolly pine plantation[J]. For Sci, 49(3): 457-466. |
Means J E, Acker S A, Fitt B J, et al. 2000. Predicting forest stand characteristics with airborne scanning LiDAR[J]. Photogrammetric Engineering and Remote Sensing, 66: 1367-1371. |
Naesset E, Buerknes K O. 2001. Estimating tree heights and number of stems in young forest stands using airborne laser scanner data[J]. Remote Sensing of Environment, 78: 328-340. DOI:10.1016/S0034-4257(01)00228-0 |
Ritchie J C, Evans D L, Jacobs D M, et al. 1993. Measuring canopy structure with an airborne lidar altimeter[J]. Transactions of the American Society of Agricultural Engineers, 36: 1235-1238. DOI:10.13031/2013.28456 |
St-Onge B A. 2000. Estimating individual tree heights of the boreal forest using airborne laser altimetry and digital videography[J]. International Archives of Photogrammetry and Remote Sensing, 32: 179-184. |
Wulder M. 1998. Optical remote sensing techniques for the assessment of forest inventory and biophysical parameters[J]. Progress in Physical Geography, 22(4): 449-476. DOI:10.1177/030913339802200402 |