 2009, Vol. 45
2009, Vol. 45文章信息
- 齐英杰, 夏广岚, 马岩.
- Qi Yingjie, Xia Guanglan, Ma Yan
- 木制楼梯扶手弯头端截面曲线的数学模型与仿真
- Curve Mathematical Model and Simulation of Wooden Staircase Handrail Elbow End Section
- 林业科学, 2009, 45(9): 116-119.
- Scientia Silvae Sinicae, 2009, 45(9): 116-119.
-
文章历史
- 收稿日期:2008-12-16
-
作者相关文章



2. 佳木斯大学机械工程学院 佳木斯 154007
2. Mechanical Engineering College of Jiamusi University Jiamusi 154007
木制楼梯扶手弯头是一种空间复杂曲面加工的木制典型工件,在现行生产中,完全采用手工加工。实现木制楼梯扶手弯头的数控加工,建立扶手弯头端截面数学模型是研究的基础与刀具设计的第一步。木制楼梯扶手弯头形状描述的难度较大,传统的加工方法只能采用靠模加工来解决空间复杂曲面的成型问题。随着人民生活水平的不断提高,木制楼梯扶手以其美观的天然木材纹理和柔性的手感而越来越受到人们的青睐,需求量日趋增大,式样和种类越来越多(夏广岚等,2007),用靠模来保证空间复杂曲面的成型问题根本不能满足各式各样扶手弯头的加工需求,靠模模具加工成本越来越高,更不能满足人们的需求(叶明亮等,2006)。利用数控机床,在编制出楼梯扶手弯头刀具刀刃曲线方程的建模程序以后,可以加工出设计的曲线;也可以利用CAD/CAM的通用软件,利用模型曲线参数驱动的通用性,直接由模型曲线方程输入设计的图形,数控机床按设计的曲线加工出空间复杂曲面。
1 数控机床进行螺线楼梯扶手弯头端截面加工时的编程方法本文在利用数控机床进行楼梯扶手弯头加工过程中,根据端截面各端点的选取和进给行程确定的理论和方法,获得了弯头端截面加工时各关键节点坐标变化的数学描述模型及相应驱动方法。在数控加工弯头端截面建模中,目前的编程方法通常有2种:1)利用ISO标准G代码指令编制由直线、圆弧组成的简单轮廓的程序,形成图形;2)在计算机中,利用自动编程软件(CAD/CAM)画出曲面轮廓的复杂图形,根据曲面类型设定各种相应的参数,自动生成数控建模程序进行空间复杂曲面建模。以上2种编程方法都能满足楼梯扶手弯头端截面数控建模的要求。
在楼梯扶手弯头端截面建模刀刃曲线方程曲线轮廓时,应该满足数控机床进行加工的工艺要求。本文使用的方法是:根据图纸要求,算出曲线上各点的坐标,再根据算出的坐标值用直线或圆弧指令代码编制程序,手工输入系统进行建模,采用G代码编程方法实现成型加工。
2 建立楼梯扶手弯头端截面的数学模型在楼梯扶手弯头的加工过程中,刀具的轮廓曲线形成楼梯扶手弯头的包络曲面,刀具廓形曲线沿着端截面轮廓曲线轨迹的运动,可以形成各种空间曲面的楼梯扶手弯头(齐英杰等,2006)。根据刀具廓形曲线形状的不同,可以得到不同形状的空间楼梯扶手弯头。当曲线运行轨迹为螺旋线时,得到螺旋型楼梯扶手弯头;当曲线运行轨迹为鹤颈线时,得到鹤颈型楼梯扶手弯头,此时它的端截面的轮廓曲线是不变的。因此,有必要对楼梯扶手弯头端截面的方程曲线进行建模,形成数控加工的参数驱动。
楼梯扶手弯头端截面的数控加工中,首先应确定它的初始点,让它与所选取数学模型的直角坐标系原点重合,然后从原点出发按着逆时针方向旋转,形成一个封闭的曲线环(马岩,2006)。由于楼梯扶手弯头端截面的轮廓曲线是以Y轴对称的,因此,在对该曲线的建模中描述它的尺寸只绘一半即可。图 1所示是楼梯扶手弯头的端截面图,从图中可见,楼梯扶手弯头端截面是由多段直线、圆弧组成的简单曲线轮廓(胡海峰等,2008;李丙才等,2005)。为了便于描述,把每段线段的端点和曲线交点分别用字母A,B,C,D,E,F,G,H,I来表示,其中A,I为端截面轮廓曲线的2个对称点,两点的坐标为A(0,L9),I(0,L6),各线段将以Li,Rj为参变量来进行描述,其中i=1,2,…9;j=1,2。

|
图 1 楼梯扶手弯头的端截面 Figure 1 Staircase handrail bend end section |
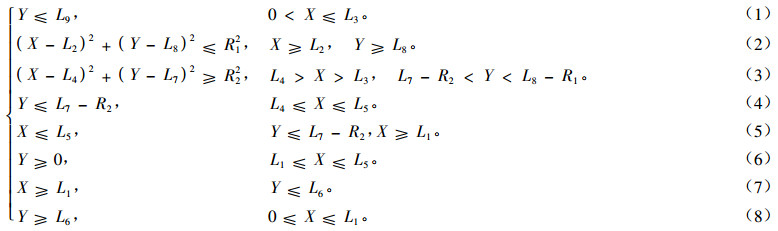
楼梯扶手弯头端截面的数学模型为:
|
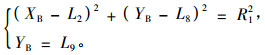
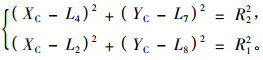
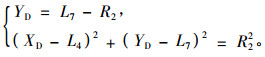
上述方程中各方程的等式约束条件为:
|
(9) |
|
(10) |
|
(11) |
|
(12) |

|
(13) |

|
(14) |

|
(15) |
式中:Li为端截面上各点到Y轴(i=1,2,3,4,5)和X轴的距离(i=6,7,8,9);R1为端截面上大圆弧的半径;R2为端截面上小圆弧的半径;X为端截面的X方向变量;Y为端截面的Y方向变量。
(1)~(8)式构成了一半楼梯扶手弯头端截面曲线轮廓内的定义域,其中(1)式定义了AB直线段的定义域;(2)式定义了BC圆弧段的定义域;(3)式定义了CD圆弧段的定义域;(4)式定义了DE直线段的定义域;(5)式定义了EF直线段的定义域;(6)式定义了FG直线段的定义域;(7)式定义了GH直线段的定义域;(8)式定义了HI直线段的定义域。每段线段首尾相连处要保证具有合乎要求的连续性,也就是说2段线段不但要具有公共的端点,而且在连接处其切线向量要共线,达到平滑过渡,从而避免出现加工凸棱等各种问题(马岩,2002)。因此,上述各方程具有相应的等式约束条件,(9)式约束了AB直线段和BC圆弧段在B点处连续;(10)式约束了BC圆弧段和CD圆弧段在C点处连续;(11)式约束了CD圆弧段和DE直线段在D点处连续;(12)式约束了DE直线段和EF直线段在E点处连续;(13)式约束了EF直线段和FG直线段在F点处连续;(14)式约束了FG直线段和GH直线段在G点处连续;(15)式约束了GH直线段和HI直线段在H点处连续。由此形成了一半楼梯扶手弯头端截面方程曲线的数学描述方程,把上述方程表达式中的X以-X带入,即可得出端截面方程曲线的数学描述方程的另一半,也就得到了整个端截面方程曲线的数学描述方程(任洪娥,2001)。
3 楼梯扶手弯头计算机仿真 3.1 楼梯扶手弯头形状的描述参数楼梯扶手弯头的描述参数由图 1给出的扶手弯头端截面参数组成。仿真系统根据所描述的参数按数学模型将空间轮廓曲线渲染生成。
当楼梯扶手弯头按描述参数生成时,楼梯扶手弯头空间轮廓曲线将按曲面形状形成立体图形;当描述参数输入不同变量时,楼梯扶手弯头几何形状将发生相应的变化,在加工过程中,楼梯扶手弯头表面的曲线轮廓起伏变化将生成数控加工刀具廓形曲线,加工刀具输出刀具廓型的变化,楼梯扶手随之发生变化(高利辉等,2002)。将计算结果送入计算机中,再经过一系列的分析运算后,得出所需的楼梯扶手弯头端截面圆周上的坐标值,并实时显示在计算机屏幕上。如果曲线过于复杂, 则采用曲线拟合的方式,设置采样点,将采样点进行曲线拟合,代到楼梯扶手弯头端截面的方程中仿真出楼梯扶手弯头端截面的真实形状。楼梯扶手弯头形状描述参数的工艺流程如图 2所示。

|
图 2 楼梯扶手弯头形状描述参数的工艺流程图 Figure 2 Process flow diagram of staircase handrail bend shape description parameters |
在楼梯扶手弯头形状描述参数中,选用PCI-1711中的输入通道AI0~AI9,用来采集廓型曲线参数变化值,输入参数连接刀具廓型的加工机床,提供稳定的刀具廓型曲线参数;同时,加工刀具的仿真也可以由计算机输出仿真形状(赵航等,2004)。数据采集卡每个通道的仿真量可以形成完整的刀具廓型,由于仿真系统输出的刀具廓型在精度上可以保证楼梯扶手弯头加工精度要求的公差之间,因此,将采集卡的仿真量输入增益设置为确保被采集的信号能够保证在楼梯扶手弯头加工精度要求的公差范围内。
3.2 楼梯扶手弯头仿真图形利用Visual C++6.0开发工具,生成图形用户界面如图 3所示,在界面的参数设定处有楼梯扶手弯头端截面的11个描述参数(L1,L2,L3,L4,L5,L6,L7,L8,L9,R1,R2),输入参数的相应值,按开始仿真按钮,得到楼梯扶手弯头端截面的图形,再点击生成截面效果图按钮,即可得到楼梯扶手弯头端截面的效果图形,图 4所示为输入参数L1=15,L2=19,L3=21,L4=28,L5=30,L6=8,L7=17,L8=34,L9=46,R1=12,R2=6时得到的楼梯扶手弯头端截面效果图。当楼梯扶手弯头空间轮廓曲线为螺旋线时,得到螺旋楼梯扶手弯头的仿真实例如图 5所示。

|
图 3 用户界面 Figure 3 User interface |

|
图 4 楼梯扶手弯头端截面的效果图 Figure 4 Cross-section effect map of elbow staircase handrail |

|
图 5 螺旋楼梯扶手弯头的仿真模型 Figure 5 Simulation model of spiral staircase handrail bend |
通过对多次输入不同描述参数值的仿真结果分析,得到各描述参数的优化范围如表 1所示,值得注意的是,选取各描述参数时要保证L5>L4,L3>L2。可见,楼梯扶手弯头的端截面图形采用数控加工是易于实现的,所得到的图形合乎现代建筑行业的要求,验证了所建立的数学模型是精确且通用的,具有重要的实际应用价值。
|
|

1) 本文提供了楼梯扶手弯头端截面的数学模型及建模理论。这些理论优于线性函数、插值函数建立的离散或非连续的模型。由于模型的连续性提高,使仿真数据处理工作大幅度简化。
2) 本文提供了楼梯扶手弯头形状刀具加工设计参数的确定方法,为楼梯扶手的数控加工提供了刀具设计理论。
3) 本文提出楼梯扶手弯头端截面的数控建模及仿真方法,对于不同种类要求的空间完美曲面设计,具有一定的理论和实用价值。
4) 通过本文的研究,可以推进木材工业加工过程数学描述研究的开展,可以推出更实用的制材数控机床,提高我国木工机床的档次。
高利辉, 王润孝, 殷磊, 等. 2002. 基于三维实体模型的多坐标数控建模过程仿真[J]. 机械设计与制造, (3): 87-89. DOI:10.3969/j.issn.1001-3997.2002.03.039 |
胡海峰, 董利红. 2008. 规则空间曲面的加工[J]. CAD/CAM与制造业信息化, (2-3): 114-115. |
李丙才, 嵇海旭. 2005. 适应数控建模的空间曲面的建立[J]. 机床与液压, (2): 50-52. DOI:10.3969/j.issn.1001-3881.2005.02.018 |
马岩. 2002. 木材横断面细胞结构的数学模型研究[J]. 生物数学学报, 17(1): 64-68. DOI:10.3969/j.issn.1001-9626.2002.01.011 |
马岩. 2006. 原木形状分段描述方法的数学描述理论研究[J]. 生物数学学报, 21(3): 435-440. DOI:10.3969/j.issn.1001-9626.2006.03.018 |
齐英杰, 杨春梅, 马岩. 2006. 马尾松细胞外廓结构简化模型的建立与仿真[J]. 林业科学, 42(9): 93-95. |
任洪娥. 2001. 新型星形下锯法第一道工序加工过程的数学描述[J]. 东北林业大学学报, 29(1): 76-78. DOI:10.3969/j.issn.1000-5382.2001.01.020 |
夏广岚, 叶明亮. 2007. 我国木制楼梯扶手弯头数控加工的工业化前景与效益分析[J]. 林业机械与木工设备, 35(12): 4-6. DOI:10.3969/j.issn.2095-2953.2007.12.001 |
叶明亮, 任长清. 2006. 木制楼梯扶手弯头加工技术的发展综述[J]. 林业机械与木工设备, 34(10): 4-6. DOI:10.3969/j.issn.2095-2953.2006.10.001 |
赵航, 林岗. 2004. 自由曲面的数控建模与仿真[J]. 河海大学常州分校学报, (3): 24-26. |