 2006, Vol. 42
2006, Vol. 42文章信息
- 于建国, 孟庆华.
- Yu Jianguo, Meng Qinghua.
- 植树挖坑机钻头主轴扭转振动数学建模与求解
- Torsional Vibration Mathematical Modeling of Auger-Bit Principal Axis of Digging Machine for Tree Planting and Its Solution
- 林业科学, 2006, 42(11): 101-105.
- Scientia Silvae Sinicae, 2006, 42(11): 101-105.
-
文章历史
- 收稿日期:2006-04-12
-
作者相关文章


2. 天津体育学院 天津 300381
2. Tianjin Institute of Physical Education Tianjin 300381
我国现有林的面积1.337亿hm2, 森林蓄积量10 137亿m3, 人均占有森林面积和蓄积量分别只有世界人均水平的16 %和12 %, 森林覆盖率仅有16.55 %, 远低于世界平均水平, 而且土地日趋沙漠化。因此, 提高森林覆盖率、保护生态环境、防风固沙, 必须从植树造林开始。利用机械化加速植树造林, 早日实现绿化祖国的“21世纪中国亚马逊工程”有重大的实现意义(潘天丽等, 2000)。
植树用挖坑机作为机械化造林设备以其结构简单紧凑、体积小、质量轻、土地适应性强、对地形反应不敏感、工作可靠、寿命长、便于维修等突出优点而被广泛使用(Eremin et al., 1975;Muthukrishna et al., 1995;Shaw et al., 1995)。多年来, 科技工作者对挖坑机的生产效率、工作部件的结构参数做过大量研究(关晓平等, 2005; 俞国胜等, 2001), 尤其是主要工作部件钻头的几何尺寸、螺旋升角等问题研究的更为深入, 形成了整套理论和公式(茅也冰等, 1991; 2004);但整机的振动特性, 特别是钻头主轴的振动特性对机器的寿命和工作品质影响较大。然而由于问题的复杂性和价值成本等原因使得这部分内容研究不多, 近年来部分专家对挖坑机振动问题有所突破(杨有刚等, 1997; 2005)。而用系统的动力学理论对挖坑机主要工作部件进行动力学仿真分析及建模求解, 在国内研究中尚未见报道。由于问题的复杂性, 难以用一个确定函数关系表示其运动规律(Bradley et al., 1993)。为了便于分析研究, 在对钻头主轴进行振动分析时, 可将其分解为扭转振动、横向振动和纵向振动3个系统分别进行研究。
本文将利用空间运动学和机械振动理论以及弹性动力学原理着重分析建立钻头主轴扭转振动模型并用数值方法进行求解, 同时考虑钻头主轴与土壤互作用等复杂因素, 将其处理成不确定的、动态的、准随机边界情形, 从而很好地把各种主要因素合理地融为一体, 所建系统动力学模型及求解过程将为下一步挖坑机钻头主轴系统动力学特性的仿真研究打下基础, 为提高钻头工作效率及改进设计方法提供了新的理论依据。
1 钻头主轴扭转振动模型的建立 1.1 基本假设钻头主轴为均质弹性直杆, 钻头螺旋翼片与主轴刚性连接且翼片半径与主轴半径差距不大; 坑轴线与钻头主轴轴线重合, 忽略钻头主轴的弯曲变形; 钻头主轴顶部与连接处及挖坑机支架简化为刚度为K弹簧; 主轴上端输入的转速为常量; 振源来自钻头主轴下端的刀片切削土壤时所产生的扭矩。

|
图 1 挖坑机钻头主轴扭转振动结构简图 Fig. 1 Structure sketch of torsional vibration of auger-bit principal axis of digging machine |
假设钻头主轴长度为L扭转时, 每一横截面绕通过截面中心的轴线转动一个角度θ, 横截面仍保持平面, 扭转振动时扭转角θ不但依赖于空间坐标x, 而且依赖时间t, 横截面上每一点的位移由该截面的扭转角唯一确定, 扭转角θ可以作为截面的广义坐标, 在坐标为x的截面处, 取一长度为dx的微段, 轴的单位长度转动惯量J(x)和横截面的极惯性矩IP(x)是坐标x的函数, 剪切弹性模量为G(邵忍平, 2005)。
在时刻t, 由于扭转振动, 在距端点x处截面的转角为θ(x, t), 扭矩为
|
(1) |
在x+dx处截面的转角θ(x+dx, t), 扭矩为

|
(2) |
假定, 单位长度结构阻尼系数为H, 微分单元上的阻尼力矩为
|
(3) |
微分单元的惯性力矩为
|
(4) |
若摩擦力矩为空间坐标x和时间t的函数, 单位长度上的摩擦力矩为P(x, t), 则作用于微分单元上的激励力矩为
|
(5) |
根据D'Alembert原理列出轴的扭转振动的运动方程

|
(6) |
分别将(1)、(2)式, 代入(6)式整理, 得

|
(7) |
再整理(7)式, 得

|
(8) |
分别令

|

|

|
则(8)式为

|
(9) |
1) 边界条件

|
式中:ω0为钻头主轴上端转速为常数; T为钻头主轴下端输入扭矩; 

2) 初始条件
|
由此可得挖坑机钻头主轴扭转振动模型
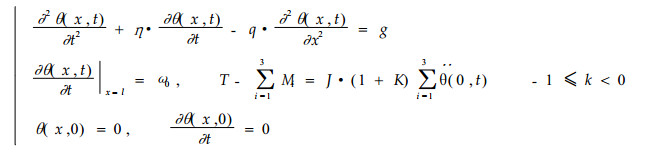
|
(10) |
由于钻头主轴扭转振动模型中边界条件的不确定性, 很难用解析法求出, 因此本文采用数值解法中的差分法来求解此扭转振动模型。
2.1 钻头主轴扭转振动方程的差分格式用差分法求解微分方程的一个关键问题是将微分方程写成相应的差分格式, 然后再运用解差分方程的计算公式求解。因此本文首先将钻头主轴扭转振动的微分方程写成相应的差分方程。为了差分计算方便去掉等式右边项, 在计算受力时再加上去。
考虑

|
(11) |
采用二阶中心差分格式

|
(12) |

|
(13) |

|
(14) |
为了书写方便, 将(xk, tj)简记作(k, j), 将θi(xk, tj)简记作θi(k, j), 由(12)~ (14)式可将(11)式化作:

|
(15) |
令截断误差

|
(16) |
如忽略阶段误差(16)式, 则(15)式为

|
(17) |
令: 

|
(18) |
第一个初始条件
|
(19) |
第二个初始条件

|
(20) |
忽略截断误差, 则得

|
(21) |
将(21)式代入(18)式得第二个初始条件差分方程:

|
(22) |
上边界

|
(23) |
下边界

|
(24) |
利用差分进行数值计算的一个重要问题是其收敛性问题, 如果所采用的差分格式不收敛, 那么其计算结果是不可靠的, 挖坑机钻头主轴扭转振动的差分格式是否收敛是进行差分计算之前必须研究的问题。
由差分格式, 收敛原理可知, 令(18)式中η=0则有

|
(25) |
有限差分解的θ(k, j)项的系数如果是负值的话, 则其解是不稳定的, 所以(18)式有限差分解的收敛条件是: 
|
(26) |
也就是说(18)式满足条件(26)式的差分是收敛的。
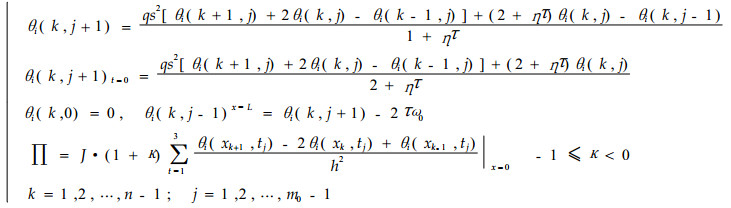
2.5 结论由式(11)~ (24)式得到挖坑机钻头主轴扭转振动模型相应的差分模型
|
(27) |
在利用误差为°(h2)差分后求导公式求出(忽略截断误差)

|
(28) |

|
(29) |
由(27)、(28)、(29)式可以分别计算出挖坑机钻头主轴上每一时刻各节点的扭转振动位移、扭转振动速度和扭转振动加速度。从而可以得到挖坑机钻头在挖坑过程中的扭转运动规律和部分动力学特性, 为进一步对挖坑机钻头主轴的动力学仿真分析及其工作性能的研究奠定了坚实基础, 对研究挖坑机整机的动态特性有重要的指导意义。
3 结束语随着林业资源的不断匮乏, 将对林业机械化的要求不断提高, 而有效地预测和控制植树挖坑机械的动力学性能及运动规律, 合理有效地解决提高钻头强度的关键问题的基础工作之一就是要建立可靠的钻头主轴动力学模型, 才能找到挖坑机钻头运动规律和动力学特性。本文根据挖坑机钻头主轴的实际振动状态, 分析了钻头主轴扭转振动机理, 利用空间运动学和机械振动理论以及弹性动力学原理着重分析建立钻头主轴扭转振动模型, 同时考虑了钻头与土壤互作用等复杂因素, 将其处理成不确定的、动态的、准随机边界情形, 从而很好地把各种主要因素合理地融为一体, 所建系统动力学模型及求解过程将为下一步对挖坑机钻头主轴系统动力学特性的仿真研究工作打下基础, 为提高钻头工作效率及改进设计方法提供了新的理论依据, 对分析钻头的动力学特性研究具有重要的指导意义, 对林业与园林机械理论研究有一定指导意义和应用价值, 但是由于影响挖坑机钻头动力学特性因素十分复杂, 目前还难以掌握。因此, 本文在分析中仍然是在假设条件基础上进行的, 还需进一步研究。在今后工作中还将对钻头主轴振动系统中的横向振动和纵向振动分别建模及求解, 并将其各子系统综合分析进行有效控制。
茅也冰, 王乃康, 鲍际平. 1991. 石质山地手提式挖坑机钻头的研制. 北京林业大学学报, 13(3): 42-49. |
茅也冰, 王乃康, 刘会敏. 2004. 挖坑机动态力学参数测试试验装置的研制. 北京林业大学学报, 26(1): 79-82. DOI:10.3321/j.issn:1000-1522.2004.01.016 |
关晓平, 马岩, 杨家武. 2005. 生态植树机松土机构运动性能理论分析. 机械工程学报, 41(10): 61-65. DOI:10.3321/j.issn:0577-6686.2005.10.012 |
潘天丽, 王蓝. 2000. 在退耕还林中应大力发展林业机械. 陕西林业科技, 4: 59-64. |
邵忍平. 2005. 机械系统动力学. 北京: 机械工业出版社.
|
俞国胜, 顾正平, 钱桦. 2001. 半干旱沙地深栽造林钻孔机的性能试验与研究. 林业科学, 37(3): 112-117. DOI:10.3321/j.issn:1001-7488.2001.03.018 |
杨有刚, 刘迎春. 1997. 挖坑机弯曲振动特征对的理论计算与实验验证. 农业机械学报, 28(2): 51-55. |
杨有刚, 刘迎春, 吕新民. 2005. 挖坑机扭转振动特征对的动力学分析. 农业机械学报, 36(9): 53-55. DOI:10.3969/j.issn.1000-1298.2005.09.014 |
Bradley D, Seward D, Mann J. 1993. Artificial intelligence in the control and operation of construction plant the autonomous excavator. Automation and Construction, 2(3): 217-228. DOI:10.1016/0926-5805(93)90042-V |
Eremin E V, Asanov V V, Tkachenko O A. 1975. New equipment for making planting holes. Lesnoe Khozyaistvo, 5: 70-72. |
Muthukrishna S V, Sujatha C. 1995. Twist drill deformation and optimum drill geometry. Computers & Structures, 57(5): 903-914. |
Shaw M C, Oxford C J. 1995. On the drilling of metals Ⅱ:the torque and thrust in drilling. Trans, 79: 139-148. |
Wang hui. 2002. On minimum norm control for and elastic robot system. Systems Science and Systems Engineering, 11(2): 158-163. |