 2006, Vol. 42
2006, Vol. 42文章信息
- 陈健, 姜宇, 杨国辉.
- Chen Jian, Jiang Yu, Yang Guohui.
- 基于分级模糊模型的温室环境控制方法
- Technique for Controlling Greenhouse Environment on Hierarchical Collaborative Structure
- 林业科学, 2006, 42(5): 104-109.
- Scientia Silvae Sinicae, 2006, 42(5): 104-109.
-
文章历史
- 收稿日期:2005-11-02
-
作者相关文章


2. 哈尔滨工程大学信息与通信工程学院 哈尔滨 150001;
3. 哈尔滨工业大学电气工程学院 哈尔滨 150001
2. College of Information and Communication Engineering, Harbin Engineering University Harbin 150001;
3. College of Electrical Engineering, Harbin Institute of Technology Harbin 150001
温室环境智能控制是近年来发展起来的一种资源节约型高效农业技术,主要是在计算机综合控制下,创造适宜于作物生长的环境,实现优质、高效、低耗的工业化规模生产(Salgado et al., 2003)。目前,由于集成芯片技术的发展和价格的降低,温室智能控制系统的硬件发展规模及相关技术均获得大幅度的改进(Salgado,2001)。温室环境智能控制系统性能的改善既要依赖硬件的改进,又要结合先进的控制算法,这样才能获得最优的温室环境综合因子,并使温室控制系统达到智能化水平(Stanghellini,1987)。温室环境系统是一个多变量大惯性非线性系统,具有交连、时延等特点(Tikhnov et al., 1997),很难对其建立精确的数学模型。模糊算法在温度环境智能控制的建模、参数优化和控制中,能够将各种温室环境参数综合起来分析考虑(Wang,2002),但由于参数数量较多,导致模糊控制规则数目过多,可读性差(Wang et al., 2001)。
本文提出一种基于分级协同结构的模糊算法,该算法具有规则数目少,可读性强,改变参数控制时无须改变所有模糊规则的优点。建立了包含湿度和温度的温室环境物理模型和子模型,及适用于温室环境控制的分级协同模糊算法。
1 温室环境物理模型温室环境的动态特性与温室内部及温室与外界空气进行能量传输和质量传输等物理过程有关。如图 1所示(Wang, 1997),利用通风和加热装置来改善室内的温度及湿度,通过遮光和人造光来改变照射条件,CO2发生器用来影响光合作用,并通过蒸发实现冷却及降温从而增加湿度(Yager, 1994)。通常情况下,在温室环境模型中主要利用空气温度、湿度及CO2浓度的微分方程来描述各个设定变量的动态特性。本文仅考虑温度及湿度2个变量,结合能量与质量守恒定理得到模型方程。室内温度Tin(℃)和湿度Hin (kg·m-3)可表示为

|
图 1 温室气候模型结构 Fig. 1 Greenhouse climate model structure |

|
(1) |

|
(2) |
其中:Ccap, T(J·m-2 ℃-1), Ccap, h(m)分别为温室空气的热容和质容。
式(1)为温室空气的能量守恒方程,室内温度Tin(℃)对于时间t(s)的导数受到加热装置提供的能量QT, heat(W·m-2)、温室大棚通风装置与外界空气进行交换时产生的能量损失QT, out(W·m-2)、与土壤进行能量交换产生的能量损失QT, soil(W·m-2)及光照产生的热量QT, rad(W·m-2)四者的影响(Zadeh, 2004)。温室空气的湿度平衡如式(2)所示,该过程主要由遮篷和土壤的蒸发水气质量Φh, C, AI(g·m-2s-1)及与外界空气间自由通风和强制通风时水气质量变化Φh, AI, AE(g·m-2s-1)决定。另外,同样影响温室空气湿度平衡的还有棚顶水气质量变化Φh, cond(g·m-2s-1),白天对此变量可以忽略不计,但在夜间则要加以考虑。
温室环境主要由2个控制信号来调节。为了便于讨论,将这2个控制信号调节器0~100%的标称功率做归一化处理,得到2个归一化参量,即加热(0≤μheat≤1)和通风(0≤μvent≤1)。当加热装置工作时,温室内部空气通过热交换机,经加热系统转换的对流能量与加热管水温Theat和内部空气温度Tin间的差值成比例,即

|
(3) |
其中:cheat为每立方米土壤的热量转换系数。同样,土壤的对流能量与土壤温度Tsoil和内部空气温度Tin间的差值成比例

|
(4) |
其中:csoil是热转换系数。光照能量的影响可以表示为

|
(5) |
其中:Rad(W·m-2)为光照,系数crad表示温室顶棚的投射特性,光照的折射及太阳能对热量的转换。与外界空气间的能量损耗可以表示为

|
(6) |
其中:cleak, roof为温室棚壁的热转换系数,通风量为Φvent=cforce, ventμvent+Φleak, vent, 由自然通风(Φleak, vent)及强制通风(cforce, vent)之和来表示,cvent为每单位体积空气的热容,而Tout(℃)为外部空气的温度。同理,温室湿度的变化可以用如下的方程来描述

|
(7) |

|
(8) |

|
(9) |
其中:Hin、Hout(kg·m-3)为温室内部及外部的空气湿度,Hstoma(Tin)为农作物的温度,cres, h为反映水蒸气交换的气孔阻值参数,cm, h为质量转换系数(3.6×10-3),ccanopy, h表示顶棚湿度范围,取决于顶棚的面积,并且在试验中假设该参数为常量,Hroof(Tout)为顶棚饱和压力。
利用该物理模型可以模拟温室环境。由于该模型为一组一阶微分方程,利用该方程组可以分析给定时间内系统的特性,结合初始条件可以获得其数值解。借助Euler法求解温室环境模型的解,通过Levenberg-Marquardt和Gauss-Newton算法获得模型参数,运算中所需数据于2003年3月15日和4月4日采自于东北林业大学帽儿山林场,采样间隔为1 min。并利用同年10月8—14日及12月5—11日期间获得的数据对模型进行验证。表 1为温室环境物理模型的计算参数。
|
|

建立上述物理模型需要2个重要条件:其一,需对物理过程进行详细描述;其二,所有过程变量需准确测量。因此,应用其预测温室环境变化非常困难。而模糊控制算法无需建立被控对象的精确数学模型,通过计算机即可完成人类用自然语言所描述的控制活动,能够将各种环境参数综合分析考虑,然后进行控制。
2.1 温室环境的分级物理模型将传统的温室环境物理模型进行分级处理,依据该模型建立分级协同结构模糊模型,可以减少模糊规则的数目,提高规则的可读性。对应本文的温室环境物理模型,考虑强制通风和无强制通风情况下环境变量的时间响应和增益不同,将温度和湿度模型分成2部分:高动态湿度模型(HDH)和低动态湿度模型(LDH),高动态温度模型(HDT)和低动态温度模型(L DT)。当满足μvent=0或Qvent=0时,下述方程可以描述LDT温度子模型

|
(10) |
其中:Qheat(t)=[Theat(t)-Tin(t)]μheat(t)为加热系统ΔT(t)=Tin(t)-Tout(t)的热通量,Theat为加热管中循环水温度,Qvent(t)=[Theat(t)-Tin(t)]为温室空气与土壤间的热交换。当μvent > 0时,HDT温度子模型可表示为

|
(11) |
其中:Qvent(t)=[Tout(t)-Tin(t)]μvent(t)为外部空气与内部空气间交换的热通量。内部温度的动态模型为式(10)和(11)之和,即
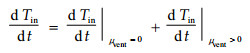
|
(12) |
当μvent=0时,湿度LDH子模型可表示为
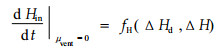
|
(13) |
其中:ΔH(t)=Hin(t)-Hout(t)为温室内、外绝对湿度的差值,ΔHd(t)=HdTin(t)-Hin(t)为温度在Tin(t)时刻露点湿度与温室空气绝对湿度的差值。当μvent > 0时,湿度HDH子模型可表示为
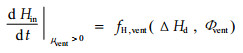
|
(14) |
其中:Φvent(t)=[Hin(t)-Hout(t)]μvent(t)为内外部空气间的水量交换。温室环境的动态特性可以通过外部输入用非线性模型描述。综合式(10)~(14),该模型可表示为

|
(15) |

|
(16) |
其中:uT=[ΔT, Rad, Qheat, Qsoil]T,uH=[ΔHd, ΔH]T。
2.2 基于分级协同结构(HCS)的温室环境模糊模型 2.2.1 HCS模糊模型在温室环境模糊模型中采用分级协同结构的主要原因为:其一,温室环境包含大量的输入变量,而模糊系统规则数目则随变量数量按指数律增长;其二,大量的变量和参数使得跟踪环境变化非常困难;其三,各变量由于相互关联,无法使用独立的闭环控制。简单的分级协同结构通过对所有子模型输出进行积分得到输出,利用数据对其训练,该结构同样适用于具有相同模式的环境预测,但当环境变化规律发生重大变化时,则其预测稳定性变差。
本文提出一种语言信息分离-分级协同结构(SLIM-HCS)算法,其结构如图 2所示。其中f1(x)代表原始系统,并具有一定的运算规则;f2(x)主要为提高系统预测精度而设计。f2(x)最初为空,当系统工作时,f1(x)中的一部分信息以恒定比率不断地转移到f2(x)中,使得f1(x)的相关系数减少,f2(x)的相关系数增加。这样仅对f2(x)的规则进行调整即可调整整个系统的规则,而无需改变系统结构及信息传输函数。当系统由多个子系统构成时,通过简单的线性扩展即可实现。图 2中子系统输出用如下的公式来表示:

|
图 2 HCS结构中信息由f1(x)模糊系统传输到f2(x)模糊系统 Fig. 2 Structure of hicerarchical collaborative fuzzy system |

|
(17) |

|
(18) |
其中:

|
(19) |

|
(20) |
即qR(x)=[ql1(x)αl1, ql2(x)αl2, ∞L, qlM1(x)αlM1]T为FBF向量与关联向量的内积,θR为θ向量与关联向量的内积(Zeng Xingjie et al., 2000)。为使f1(x)模糊系统中的一部分信息以恒定比率不断地传输到f2(x)模糊系统中,式(17), (18)应使下式最小以使系统规则随外界环境变化而变化

|
(21) |
其中:Q, P为矩阵。式(21)的最小化条件满足

|
(22) |


温室环境的动态特性在物理上表现为能量转化和质量转换等过程的组合。利用式(3)~(9)对这些过程进行模拟及组合,利用采集数据集对参数进行辨识。各个物理过程间的相互影响确定了如何构造HCS结构中的模糊模型,即每个子模型是一个物理过程的模糊模型。
通过2种方式可以对分级模型进行调整:1)直接根据采集的试验数据对分级结构的模糊规则进行调整;2)利用传统的学习算法建立平式模糊模型,其结构为分级结构。第2种方式因无需特定的结构即可完成学习过程,能够随时对分级结构进行调整,且不必重复所有的识别过程,所以具有显著的优越性;同时又可以对每个模糊子系统的模糊规则数进行动态调整,调整方式与具有最小数目的优化规则相对应。
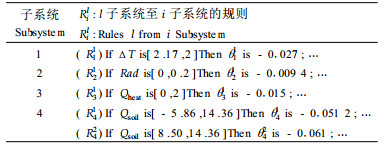
构建HCS模糊模型的具体方法为:首先,利用正则化NRLS算法对模糊模型进行识别;然后,利用SLIM方法将模糊系统设计成为具有HCS形式的分级结构。同时要求每个模糊系统能够模拟温室环境的一个动态特性或者能够描述模型特性的机制调节。按照这种方式,LDT和LDH平式模糊模型则具有了HCS结构,每个LDT和LDH平式模糊模型都包含5个子模型。将平式模型作为结构的第1级,且与其他级不相关,也不影响模型的输出。使用HCS算法将信息由f1(x)子系统传送到HCS结构的其他级。考虑到其他级的规则,该步骤可以减小第1级中规则间的关联性。这一步是通过调整隶属度函数和提高其他子模型的规则相关性来实现的,以此来补偿第1级规则相关性的减小。用这种方法将温室模糊模型分割成为几个不同的部分,所以,HCS结构的4个子模型具有同一个输入变量,如图 3、4所示的LDT和LDH模型。表 2给出了LDT子模型的If-Then模糊规则,同样LDH、HDT模型的规则可以由相同的方法构建。

|
图 3 每个模糊子模型LDT输入变量的模糊集 Fig. 3 Descriptor fuzzy sets of input variable for each fuzzy submodel LDT |

|
图 4 每个模糊子模型LDH输入变量的模糊集 Fig. 4 Descriptor fuzzy sets of input variable for each fuzzy submodel LDH |
|
|
通过试验主要是为了验证分级协同结构的模糊模型在模糊规则数目上具有的优越性及HCS模糊模型的预测性能。利用模型识别过程中的时间极限对其性能进行评估,同时通过计算根均方误差

|
(23) |
|
(24) |
其中:N为数据样本的个数,yk为模型的输出,dk为模型的实际输出。
试验结果表明:由正则化NRLS算法得到的模糊识别系统具有大量的模糊规则。若模糊模型具有HCS结构,则空气温度和湿度模型中的主要信息被传送到HCS的各个部分,因此其规则数目明显减少,如表 3所示。图 5给出为利用HCS模糊算法获得的预测结果与真实值的曲线,结果表明:HCS模糊算法具有较高的预测精度。
|
|


|
图 5 HCS测量值与预测值曲线 Fig. 5 The curve with the measured and simulated 曲线1:测定值Curve1:the measured;曲线2:模拟值Curve 2:the simulated. |
本文在建立温室环境分级物理模型的基础上,设计了一种新颖的基于分级协同结构的模糊模型。利用分级的模糊子模型,可以有效地解决多输入复杂非线性系统模糊规则数目过多的问题;利用SLIM-UCS算法将包含模糊规则的信息在不同子模型中传输,解决了由于外界环境变化而引起的规则失效和性能不稳定的问题。试验结果表明:HCS温室环境模糊模型规则数目少,性能与传统平式模糊系统相当,为简化系统设计提供了有效的手段。
Salgado P, Boaventura J, Couto C. 2003. A fuzzy identification and controller for the agriculture greenhouse. In Proceedings of the seventh international conference on computers in agriculture, Orlando, USA, 813-820
|
Salgado P. 2001. Fuzzy rule clustering. IEEE International conference on systems, man and cybernetics, Tuckson, Arizona, USA, 1002-1009
|
Stanghellini C. 1987. Transpiration of the greenhouse crops. Ph D. Thesis, Wageningen Agricultural Univcrsity, Wageningen, Netherlands, 79-85
|
Tikhnov A N, Arsenin V Y. 1997. Solution of ill-posed problems. Washington: Winston, 204-210
|
Wang Linxi. 2002. Stable adaptive fuzzy control of nonlinear systems. IEEE Transactions on Fuzzy Systems, 8: 146-155. |
Wang Linxi, Mendel J M. 2001. Fuzzy basis functions, universal approximation and orthogonal least-square learning. IEEE Transactions on Neural Networks, 3: 807-814. |
Wang Linxi. 1997. A course in fuzzy systems and control. Prentice-Hall PTR, 120-129
|
Yager R R. 1994. Essentials of fuzzy modeling and control. New York: Wiley, 18-23.
|
Zadeh L. 2004. Fuzzy logic computing with words. IEEE Transactions on Fuzzy Systems, 4: 103-111. |
Zeng Xingjie, Singh M G. 2000. Approximation aceuraey analysis of fuzzy systems as function approximators. IEEE Transactions on Fuzzy Systems, 4: 44-63. |
Zeng Kai, Zhang Ningyu, Xu Wengli. 2000. A comparative study on sufficient conditions for Takagi-Sugeno fuzzy system as Universal Approximation. IEEE Transactions on Fuzzy Systems, 8: 773-780. DOI:10.1109/91.890337 |