 2003, Vol. 39
2003, Vol. 39文章信息
- 刘晋浩, 陆怀民.
- Liu Jinhao, Lu Huaimin.
- 伐根清理机器人研制
- MANUFACTURE AND STUDY OF THE ROBOT OF EXCAVATING TREE STUMP
- 林业科学, 2003, 39(4): 108-112.
- Scientia Silvae Sinicae, 2003, 39(4): 108-112.
-
文章历史
- 收稿日期:2002-02-27
-
作者相关文章


在森林采伐剩余物中,伐根占有相当大的比重,而且用途很广,可用于硫酸盐纸浆生产、微生物工业和制造木塑料等。但由于伐根采掘相当困难,除少量采用人力挖掘或推土机、挖掘机等挖掘外,大都任其留在采伐迹地上自然腐朽。这样不但浪费了资源,而且不利于人工或天然更新造林,降低了林地利用率并易导致森林病虫害的发生。为此,国内外都积极研制过伐根清理机械。如:推齿式拔根机、绞盘机钳式拔根机、杠杆式拔根机、YB-30型振动式拔根机(赵哲申等,1993)、牵引式掘根机(薛扬等,1992)、MEILLER-RB型梳根机、MHM型集根机,RSD-620型铣根机、Akπ-1挖根机。这些机械共同特点是将根系一起拔出,要求功率大。对地表破坏十分严重,清理伐根的径级小,且价格贵、效率低,因此均未能得到推广应用。为此本文结合我国国情、林情研制了一种既先进又经济适用、高效率、具有行走功能的集铣切、扭动、提拔功能于一体的伐根清理机器人。
1 总体结构设计 1.1 伐根清理机器人机构原理原理见图 1。是由一个六连杆机构组成有6个自由度的机器人。机器人手臂部有3个自由度来确定其位置,3个自由度来确定其方向(吴振彪,1997;熊有伦,1996;李CSG等,1989;Richard et al., 1997; Manseur et al., 1989)。

|
图 1 伐根清理机器人机构原理图 Fig. 1 Mechanism drawing of the robot of excavating tree stump l1、l2、l3、l4、l5、l6分别为各臂的臂长l1、l2、l3、l4、l5、l6:Length of each boom; θ1、θ2、θ3、θ4、θ5、θ6为各关节轴的转角θ1、θ2、θ3、θ4、θ5、θ6:Rotating angle of each axis. |
伐根清理机器人总体结构如图 2所示。主要由行走机构、伐根清理机械手、单片机控制系统等组成。行走机构采用WY-60型履带式挖掘机底盘;机械手由回转盘、大臂、小臂和伐根清理旋切头等组成。

|
图 2 伐根清理机器人结构简图 Fig. 2 Structural drawing of the robot of excavating tree stump 1.回转盘Slewing pan;2.大臂油缸Inner boom cylinder;3.小臂油缸Outer boom cylinder;4.腕部油缸Wrist cylinder;5.旋切液压马达Rotating and cutting hydraulic motor;6.旋筒Rotating tube;7.夹爪Cliping claw. |
旋切头为筒式结构,由两个液压马达经齿轮传动结构(图 2中未绘出)驱动下端有锯齿式万能刨旋齿刀具的旋筒对伐根进行切削作业。侧根切断后,由旋切头内的夹紧油缸及其杆系传动机构(图 2中未绘出)驱动铰装在筒壁上的4个均布槽中的夹爪将伐根夹紧,在大小臂联合作用下将伐根拔除,并堆放到指定位置。
2 液压驱动系统设计(费仁元等,1998)伐根清理机器人采用双泵双回路全液压驱动,原理如图 3所示,是在WY-60履带式挖掘机液压系统基础上重新改造而成的。

|
图 3 伐根清理机器人液压系统原理图 Fig. 3 Principle drawing of hydraulic system on the robot of excavating tree stump 1、4.电磁溢流阀Electromagnetic discharge valve;2、3.高压齿轮泵High-pressure gear pump; 5、6.电液比例调速阀Electric-hydraulic proportional governing valve; 7.电磁阀Magnetic valve; 8、41.节流阀Throttle valve; 9.冷却器Cooler; 10.电液换向阀Electromagnetic-hydraulic-operated direction control valve; 11、12、30、31、34、35、38、39.过载补油阀Under over the load providing oil valve; 13.旋切液压马达Hydraulic motor for rotating and cutting; 14、16、29、33、37.电磁换向阀Solenoid-operated directional control valve; 15.腕部油缸Wrist cylinder; 17.小臂油缸Outer boom cylinder; 18、19.手动换向阀Hand-operated directional control valve; 20、21.单向节流阀One-way throttle valve; 22.回转接头Rotatable oil pipe joining unit; 23、24、25、26.安全阀Relief valve; 27、28.行走液压马达Hydraulic motor traveling; 32.回转液压马达Hydraulic motor; 36.大臂油缸Inner boom cylinder; 40.夹紧油缸Clipping cylinder; 42.压力继电器Pressure relay. |
由发动机驱动的两个CB-H型高压齿轮泵3和2分别给两个摆线齿轮液压马达27和28供油。驱动左、右两侧履带行走,行走速度与方向由驾驶员操纵手动换向阀18、19来完成。泵3同时为两个旋切液压马达13、腕部油缸15和小臂油缸17供油,泵2则同时为回转液压马达32、大臂油缸36和夹紧油缸40供油。
旋切液压马达13为两个BH-160型摆线齿轮马达,过载补油阀11、12为液压马达13作过载保护。电磁阀7可使两泵合流实现高速旋切,单泵供油时旋筒转速为200 r·min-1,合流后可达400 r·min-1,实际转速可由节流阀8进行调节。压力继电器42作过载保护。
夹紧油缸40安装在旋切头内部,经杆系传动机构驱动铰接于旋筒壁上4个长槽孔中的爪具,可夹紧或松开伐根。夹紧时爪下端向内最大可倾斜18°,完全可以夹住伐根;松开时爪回位到槽孔中,不影响对伐根的旋切作业。过载补油阀38、39对油缸40起过载保护作用,并可调节夹紧力的大小,夹紧油缸的运动速度由节流阀41调节。
大臂油缸36、小臂油缸17、腕部油缸15和回转液压马达32由电液比例调速阀5、6与单片计算机组成电液比例控制系统进行控制,可以实现机械臂各关节的联动动作的控制与调节。
3 控制系统设计(吴振彪等,1997;何立民,1990;马忠梅等,1999)旋切液压马达和夹紧油缸的速度由节流阀调节后在伐根清理作业过程中不再进行自动调节控制,其余液压执行元件由两个闭环控制系统进行控制,控制系统框图如图 4所示。油泵2和电液比例调速阀6控制回转液压马达32和大臂油缸36的工作速度,油泵3和电液比例调速阀5控制小臂油缸17和腕部油缸15的工作速度。由计算机同时控制两个电液比例调速阀开口的大小,进行速度调节与协调,可以控制机械手左右回转、大臂升降、小臂升降、旋切头俯仰,以及旋筒左右旋转和四爪夹具的夹紧与松开等动作。

|
图 4 伐根清理机器人计算机控制系统框图 Fig. 4 Computer-control system of the robot of excavating tree stump |
图 4中,机械手回转角θ1、大臂仰角θ2、小臂与大臂之间的夹角θ3、旋切头相对与小臂的夹角θ4由角位移传感器进行检测和反馈,同时通过安装在转台前方的摄像机对伐根的位置及其与旋切头的相对位置进行识别,由计算机控制机械手各关节的运动,使旋切头能正确地垂直对准伐根。
计算机控制系统安装在驾驶室内,利用手柄和键盘进行操作,由一台5.5英寸图像显示器显示图象。机械手运动有自动与手动控制两种功能,驾驶员可自行选择。
4 伐根清理试验在对伐根清理机器人的主要设计参数、性能、指标、系统地进行定性与定量综合分析后,根据该“机器人的技术要求”优化了试验设计,如对旋切刀具材料的耐用度(陈建为等,1999)、切削速度、进刀量、切削深度等因素作回归正交试验设计,确定了试验项目、试验条件和试验方法。
4.1 试验项目主要针对14项技术参数进行测定。
4.2 试验条件样地落叶松、桦树林迹地,坡度0~13°,伐根150~170个·hm-2;样机技术状态正常油水加满、各种测量仪器仪表及工具合格。
4.3 试验方法人工直接观察测量,读取、记录试验数据。通过仪器(传感器、非接触式测速仪、测力仪等)和数据采集仪自动获取试验数据。按照试验设计要求的试验次数进行循环作业试验作业循环工艺参数(每循环工作时间)测定。
该试验是在大兴安岭图强林业局奋斗林场进行,驾驶员操作机器人进入采伐迹地,停稳后按下作业启动键,输入密码,液晶显示器会显示出各系统的状态情况,并给出提示。利用键盘选择相应的已固化在EPROM芯片中的执行程序或输入命令,机械手便可进行自动控制作业。如采用手动作业,驾驶员操纵控制手柄,使机械手回转、变幅、使旋切头垂直对准伐根,启动旋切液压马达,同时机械臂下行进给旋切伐根,待伐根的侧根全部切断后,关闭旋切液压马达,启动夹紧油缸,利用四爪夹紧伐根,提升机械臂将伐根拔出,再启动回转液压马达将伐根送到指定地点归堆或运输伐根的车辆上方,松开四爪夹具伐根自动落下。完成一个伐根清理过程后,转动机械手清理下一个伐根(再进行下一个循环作业)。
作业循环工艺参数有以下8个:机械手由停放位置伸至适合高度时间(A);机械手由一个伐根回转到相邻的另一个伐根时间(B);旋筒中心垂直对准伐根中心的时间(C);启动旋切达到均匀旋转时间(D);旋切进行(包括停止)时间(E);夹紧伐根时间(F);提拔伐根时间(G);归堆或装车时间(H)。测得各项工艺参数值见表 1。
|
|
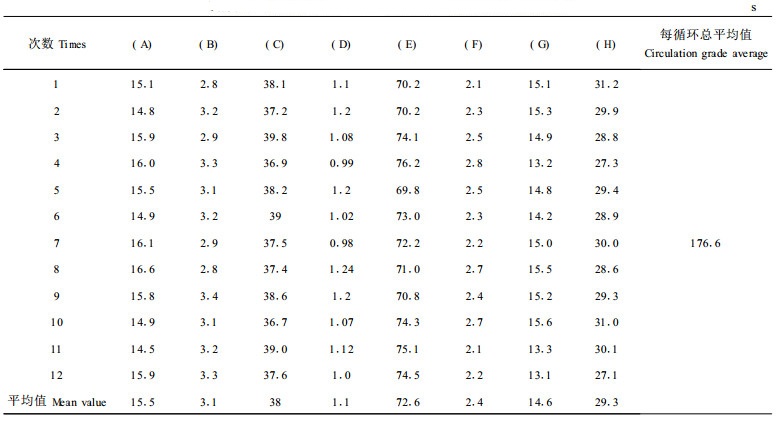
试验表明,该机器人一人操作,在伐区迹地内每一个停留位置可清理机器人周边4~8 m范围内的全部伐根,最大可清理伐根径级为550 mm。平均每3~4min可清理一个伐根每天(6 h),可清理伐根100个左右,效率是人工挖掘伐根的20~25倍。清理伐根后在迹地上仅形成直径为700 mm的坑穴,对地表破坏极小,而且可以在坑穴中直接植树。
5 结论采用六自由度机械手,可满足在地面不平的采伐迹地上进行伐根清理作业的动作要求。
机械手采用双泵双回路液压系统驱动和计算机系统控制,能实现伐根自动清理作业,提高了伐根清理效率。
换装不同直径和长度的旋筒,可用于清理径级、根系不同的伐根。大兴安岭落叶松为水平根系,没有垂直向下的主根,侧根分布深度一般不超过400 mm,因此本样机旋筒最大入土深度设计为500 mm。有些树种如农业区的杨树、榆树等树种具有散生根系或主直根系,需依具体情况加大旋筒径级和长度。
利用该机器人清理伐根,效率与人工挖掘相比可提高20~25倍。与推齿式、杠杆式等拔根机相比,功率可减少一半(本机功率58.8 kW),且对地表破坏小、避免了水土流失。如用拔根机每清理一个兴安岭落叶松伐根,将会破坏地表 10 m2以上,用本机清理只可留下直径700 mm坑穴并可直接植树造林有很好的社会、生态环境效益。
本机亦可用于城市改造、输变电线路安装、道路修建清除伐根,以及其它需要挖坑作业的场合。
陈建为, 刘晋浩, 葛安华. 1999. 新型智能伐根清理机器人切削力的计算. 森林工程, 15(3): 35. |
费仁元, 张慧彗. 1998. 机器人机械设计和分析. 北京: 北京工业大学出版社.
|
何立民. 1990. MCS-51系列单片应用系统设计. 北京: 北京航空航天大学出版社.
|
李C S G, 冈萨雷斯R C.机器人学.杨静宇, 李德昌, 李根深等译.北京: 中国科学技术出版社, 1989
|
马忠梅、籍顺心编著, 单片机的C语言应用程序设计, 北京: 北京航空航天大学出版社, 1999: 212-266
|
吴振彪. 1997. 工业机器人. 武汉: 华中理工大学出版社, 122-142.
|
熊有伦. 1996. 机器人应用技术基础. 武汉: 华中理工大学出版社.
|
薛扬, 由兴敏. 1992. 机械掘根实践研究. 林业机械, (6): 7-8. |
赵哲申, 齐国, 贾君兰. 1993. YB-30型振动式拨根机的研制及试验. 林业机械, (4): 98. |
Richard M M, Li Z X, Sastry S S. A Mathematical Introduction to Robotic Manipulation.徐卫良, 钱瑞明译.北京: 北京机械工业出版社, 1997: 51-142
|
Manseur R, Doty K L. 1989. A robot manipulator with 16 real inverse kinematic solutions. International Journal of Robotics Research, 8(5): 75-79. DOI:10.1177/027836498900800507 |