 2003, Vol. 39
2003, Vol. 39文章信息
- 马岩.
- Ma Yan.
- 压缩弯曲木平面机器人弯曲曲线形成理论研究
- RESEARCH ON FORMING THEORY OF BENDING CURVE OF CONSTRINGENT FLEXURAL WOOD PLANAR ROBOT
- 林业科学, 2003, 39(4): 104-107.
- Scientia Silvae Sinicae, 2003, 39(4): 104-107.
-
文章历史
- 收稿日期:2002-03-20
-
作者相关文章


压缩弯曲木是丹麦木制品研究所发明的一种木材弯曲的新方法(Salibury, 1985),这种工艺是在高温高压处理完木材后,将木材沿轴向加压,使木纤维产生轴向预变形。这样压缩后的弯曲木在进行常温常压变形处理时,木纤维可以进行任意形状的弯曲,压缩预变形不同,弯曲的角度也不一样。处理后的木材在进行大变形弯曲后,绝不出现劈裂,甚至可以将木材弯曲成弹簧的形状,而且可以保持设计要求的曲线。本文将讨论在压缩弯曲木木纤维弯曲过程中利用机器人进行弯曲时弯曲点的选取和进给行程的确定理论和方法,以及形成弯曲曲线时各弯曲点坐标变化的数学描述理论。
1 压缩弯曲木两端固定端固定形成的讨论在压缩弯曲木的弯曲过程中,弯曲木必须有一个确定的夹紧方式,从机械学和力学的理论出发就是必须有一个可靠的固定端,才能保证弯曲出确定的设计曲线。固定端的形成往往决定曲线的端部形状和曲线弯曲点位置的选择。
压缩弯曲木端部的平面固定按力学方式的理想中线固定,分为下列常见的几种形式:(1)可转固定端限定了x和y方向的位移,允许沿z轴的转动,具体简化的力学模型见图 1;(2)完全固定端限定了x和y方向的位移和沿z轴的转动,见图 2;(3)可移动固定端限定了x或y方向的一个位移和沿z轴的转动,见图 3。

|
图 1 可转固定端 Fig. 1 Fixation of rounding |

|
图 2 完全固定端 Fig. 2 Fixation of whole |

|
图 3 可移动固定端 Fig. 3 Fixation of moving |
图 1中的边界条件是:x=0, y=0, θz≠0。这种固定形式的弯曲是弯曲发生在起始部位,在固定的同时不能限制弯曲的发生。这种弯曲形式往往需要两端固定。
图 2中的边界条件是:x=0, y=0, θz=0。这种固定形式的弯曲是弯曲发生在过起始部位一段以后的部位,在弯曲发生的起始部位不许发生弯曲,在固定这种弯曲构件时既要固定又要限制弯曲的发生。这种弯曲形式往往可以是一端固定,需要两端固定时另一端是辅助固定。
图 3中的边界条件是:x≠0, y=0, θz≠0。这种固定形式的弯曲是发生在某一部位,在这一段加上这样的一个约束以后,这个部位可以产生一个特定的弯曲曲线。这种弯曲的固定方式可以在起始和终止位置,也可能发生在曲线中间的某一个部位,在固定这种弯曲构件时既要固定又要限制弯曲的发生。这种弯曲形式往往需要两端固定。
2 压缩弯曲木六点弯曲曲线形成的基本条件在压缩弯曲木的形成过程中,弯曲的点越多,形成曲线的模拟精度就越高。在实际生产中,一般家具构件的弯曲弧段很少超过3段,所以用6个点就可以完成绝大多数弯曲家具构件(Ma, 1999)。
如果弯曲家具构件是图 2的固定形式,即一端需要固定并保持垂直于固定端,用数学的语言描述就是:弯曲家具构件固定端弯曲点处理论曲线相对弯曲机器人机架的x和y方向的位移为零,位移对x方向的导数也为零。
假设:家具理论廓线的中心线方程为f(x, y), 设计时,f(x, y)是连续曲线,无尖点和折点(如果弯曲后在外廓加工出尖点不影响它的连续性)。在实际弯曲时,利用本文提供的方法,最多采用6个点对设计曲线进行模拟,这种家具材料是最常见的。因此,曲线的方程如果是高次方程,它的方程次数最多不能超过5次,如果用3次样条函数进行曲线模拟,采用6个点可以建立5个区段,通过6个点的6个yi值、xi值(i=0, 1, ……5)和两个端点的边界条件,就可以定出3次样条的全部系数。由于家具弯曲构件设计时一般都是规则曲线,模拟的精度一般要求不高,因此采用高次方程模拟相对简单。高次方程的求解通用性差,但分析方法简单,处理精度高。用3次样条函数的通用性好,程序设计有规范的理论和方法。因此,在工业化生产中,最好根据不同条件选用3次样条函数或高次方程模拟。
3 压缩弯曲木高次方程六点模拟回归的理论研究如果家具平面弯曲构件的理论弯曲设计曲线弧段少于或等于3段,用6个点模拟该曲线一般不会出现问题的(Ma,1999)。假设:理论弯曲曲线的模拟方程为(王梓坤,1991)

|
(1) |
由于f(x)可以保证曲线具有五阶连续函数导数并保证函数的连续性,因此,用5次模拟方程,模拟理论弯曲的设计曲线是连续曲线。图 4所示是一个平面弯曲家具构件的设计立体图,图 5是该件中线的模拟曲线。

|
图 4 弯曲家具构件立体图 Fig. 4 Solid drawing of flexural wood component |

|
图 5 家具构件平面理论弯曲曲线 Fig. 5 Curve of furniture component |
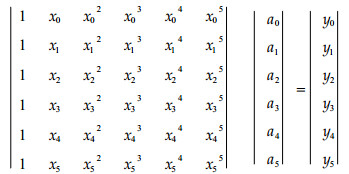
各点的坐标为(xi, yi),i=0, 1, ……5,分别将(xi, yi)代入(1)式可以得到下列方程(王梓坤,1991)
|
(2) |
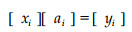
如果将(2)式写成矩阵的形式
|
(3) |
在方程(3)中[ai]式矩阵是未知数组,如果|x|≠0,方程(3)就有确定的唯一解。求出a0, a1, a2, ……a5以后,将ai代入(1)式,就构成了平面家具弯曲构件的理论弯曲曲线的模拟方程。
在[ai]的求解中,出现|x|=0的情况极少。如果|xi|=0,方程出现病态,只要略为改变xi的大小就可以使|xi|≠0。由于家具弯曲构件的精度要求并不是太高,所以略为改变xi的初始选值点,不会产生太大的误差。
求出xi和yi以后,在弯曲曲率很大时,xi和yi就是弯曲机器人x和y向的理论进给数值,在0点和6点将家具构件夹紧的固定方式中由步进电机按y1, y2, y3, y4, y5进给,就可以弯曲出图纸规定的形状。如果弯曲曲率太小时,或是图 2的固定方式就需要同时控制x1, x2, x3, x4, x5和调节插值的区间,当然这些也没有什么技术上的难度。
4 压缩弯曲木的三次样条函数模拟回归理论的研究利用数学手段进行机器人运动曲线或曲面研究已经取得了一些成就(齐学义等,2000;李树军等,2002;徐礼钜等,2000;余永权,2001)。本文采用三次样条函数也可以模拟家具平面弯曲构件的理论弯曲设计曲线。由于在三次样条函数方程常数确定时,系数确定的矩阵可以保证收敛,同时,三次样条函数计算有确定的计算方法和程序,可以简化机器人数控系统的理论研究。但三次样条函数只能保证函数的二阶连续导数,即只能保证最简单的连续,特别是曲线复杂以后,利用三次样条函数模拟的误差可能大于高次方程。
在用三次样条函数进行6点模拟时,要求x0 < x1 < x2 < …… < x5,xi≠xi+1,这是三次样条函数成立的条件之一,如果弯曲曲率太大时可能出现xi > xi+1 (i=0,1……5)。因此,三次样条函数在进行模拟的过程中是有条件的。同时,用三次样条函数进行模拟时最好先要按设计曲线的走向分段,并剔除不合理的曲率变化。
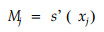
在三次样条函数的模拟过程中,在区间[x0, x5]上有y=f(x)的三次样条插值函数s(x),指的是在每一个子区间[xj, xj+1]上,s(x)都是3次多项式(j=0, 1, ……4)。这样设置曲线的目的是保证曲线的光滑连续,即在[x0, x5]上保证s(x)有一至二阶的连续函数。在子区间[xj, xj+1]上(j=0, 1, ……4)且(王梓坤,1991)

|
(4) |
在上式中:hj=xj+1-xj
在s(xj)的方程中:
|
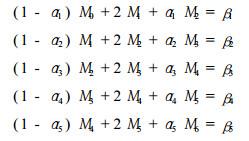
Mj是由下列方程及边界条件确定出来的:
|
(5) |
式中:αj=hj-1/(hj-1+hj)

|
利用三次样条函数求解从理论上分析是很复杂的,从推导的过程中可以看出它成立的条件是有限制的。因此,在工业化应用中它也不是可以100%的收敛。
5 应用实例分析从本文的理论分析可知,高次方程和三次样条函数分析法模拟在理论上都是可行的,各有各的优点。如果从通用性上讲,三次样条函数的优点明显一点,但从具体分析的明了和简洁方面分析,高次方程模拟的优点要明显。限于篇幅本文仅讨论高次方程的模拟方法和应用示例。
假设图 5的原料长度是650 mm,在弯曲前的初始位置是平均分布的,弯曲木机器人的初始位置由下表列出。
|
|

弯曲的过程中,表中xkj和ykj中k=0是表示初始点,(x0, y0)点处于图 2的固定方式。因此,图 5的边界条件是:

|
(6) |
由于x0=y0=0,则方程(2)的第一个式子已经无意义,因此,必须增加一个方程来确定另一个方程中的待定系数。将(1)式求导数可得:

|
(7) |
将(x01,y01)代入(7)式,就可以得到一个方程,从而可以求出所有的待定系数。
按图 5的形式设计时要求各点的位置坐标见下表,表中的xki中,k=1是表示弯曲后的数据。
将表 2的数值代入修正后的(2)式中,就可以求出[ai](i=0, 1, ……5),求解(2)式以后,就可以建立该家具构件的弯曲中线的理论方程。
|
|


|
用该方程就可以回归出来设计曲线,方称的常数是用(7)式假设xki是正确的,由xki求出yki,回归后的xki中,k=2,i=6点是y26近似等于零的点。表 3给出回归的误差。
|
|
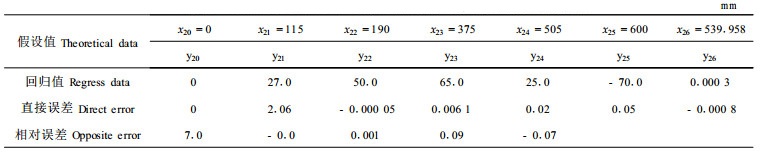
从上述误差分析,完全可以满足家具工业的要求。
6 结论采用高次方程回归的弯曲精度完全可以满足家具工业的要求;高次方程回归的方法在方程出现正收敛时可以通过调整x方向的间距来改变收敛性;采用3次样条函数也可以解决弯曲模拟的曲线回归问题;机器人作为弯曲木的弯曲设备可以避免每生产一个元件生产一套模具的加工方法,彻底解决加工弯曲木需要生产大量模夹具的问题;弯曲木机器人可以使弯曲木生产数控化。
李树军, 王玥. 2002. 一种求解6-3构型并联机器人机构位置正解的逼近算法. 机械科学与技术. |
齐学义, 欧志英, 邬再新. 2000. 混流式水轮机叶片现场修形机器人运动轨迹的研究. 水力发电学报. |
徐礼钜, 范守文. 2000. 机器人奇异曲面及工作空间界限面分析的数字-符号法. 机械科学与技术. |
王梓坤. 1991. 常用数学公式大全. 重庆: 重庆出版社.
|
余永权. 2001. 模糊控制技术及其应用. 计算机世界报. |
Ma Y. 1999. The research of the peeling log six points centering theory. 14th International Wood Machining Seminal, Paris: 641-646. |
Salibury J K. 1985. Robot hans and the mechanics of manipulation. The MTT Press.
|