|
·科技纵横·
自驱动的模拟式柔性电子皮肤
皮肤是一种集感知触碰、拉伸、温度等信号于一体的器官,它不仅能够将感知到的外界信息转换为电信号发送给大脑,从而使后者做出进一步的数据处理,而且会据此对外界刺激做出相应的反应和调整。从功能上讲,皮肤是一种智能的传感系统,具有可拉伸、检测精度较高、适用范围广等特点。受生物皮肤的启发,人们希望能够发明出性能可与之相媲美可采集多种信号(如力学、温度等物理信号,PH值、特定物质组分浓度等化学信号)的传感系统——电子皮肤(eSkin),同时还希望它具有柔性或可拉伸性、透明性、自驱动、自修复、生物兼容性等优异的性质,以期能够在人工智能领域和仿生学修复术等领域拓展出更加广泛的应用。 近年来,研究者依靠不同材料、不同器件结构与不同传感原理,逐步开发出性能更加优越、功能更加丰富的电子皮肤。然而,随着对电子皮肤研究的继续深入,有两个问题成为了制约其继续发展的瓶颈。其一,为了提高电子皮肤的分辨率,传感单元大幅增加,因而需要处理的信号数量也大幅增加,对处理电路提出了更高的要求且更复杂,导致电子皮肤的便携性、柔性等降低。其二,电子皮肤的供能问题,作为一个可以运行的整体,电子皮肤必须要有配套的稳定供电设备,常用的电池不仅体积大、重量大而且需要定期更换,导致电子皮肤的实用性大幅降低。 笔者的研究团队基于摩擦电效应与静电感应原理开发的电子皮肤成功解决上述两个问题。为使电子皮肤能够探测到接触位置与接触速度,我们将电子皮肤和与其接触的物体作为两种可以在相互之间发生电荷转移的摩擦材料。在分离过程中,接触位置可以依据4个两两平行且呈正方形排列的条形电极接收到的信号计算而得到。由于点电荷电场的强度与带电量呈正比,而不同位置的电势也与带电量呈正比,因此带电量与不同位置电势的比值无关,因而该比值只与接触点与电极的相对位置有关。这证明了电子皮肤的传感原理对于接触位置的测定是有效的。 对接触物体作点状近似、对条形电极作点电极近似,并且假设每次分离的距离都为某一定值,最终得到了电子皮肤的物理模型。随后,引入电极、物体与地之间的阻抗,以及接触点与电极、物体之间的电容,构成电子皮肤与物体这一整体的等效电路。理想的电子皮肤的定位只与接触位置有关,该电子皮肤的输出不随接触分离的频率变化而变化,这显示出其优越的性能。 为了提高电子皮肤的信号输出,我们选择了聚二甲基硅氧烷(PDMS)这种摩擦材料,它具有良好的化学惰性、透明性与柔性。为进一步提升其摩擦特性,采用硅模板转印的方式形成了表面具有微纳结构的PDMS薄膜。此外,使用C4F8等离子体对薄膜表面进行处理能进一步增强PDMS摩擦材料转移电子的能力,使用有良好导电性的银纳米线作为电极以及良好化学稳定性的聚对苯二甲酸乙二醇酯(PET)作为衬底材料使得电子皮肤整体具有较好的柔性。 这种新型的电子皮肤(图 1)结构十分简单,4个条形银纳米线电极位于紧密相接的衬底材料PET与摩擦层PDMS之间,分布于正方形电子皮肤的四边。由于PDMS与PET都具有良好的化学稳定性且无毒,该电子皮肤在日常环境中适用范围较为广泛,且稳定性好。测试结果表明,该电子皮肤具有测定接触点与接触速度的功能。 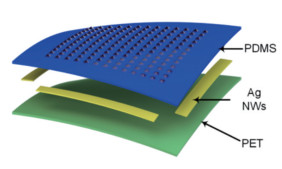 图1 电子皮肤的结构示意 该电子皮肤具有显著的优点。首先,它不依赖外部供能;其次,它只需要4个电极,且采用静电感应原理,不仅使得电子皮肤定位精度的提高不依赖于传感单元数量的增加,也使其在理论上拥有无限高的分辨率(其平均分辨率约1.9 mm),并且具有极大的提升空间。此外,它还具有柔性、透明性、精度高、稳定性好等优异特性。我们将该电子皮肤贴在机械手表面(图 2),并精确定位了人手与机械手的接触,实验显示出电子皮肤在人工智能领域将有广泛的应用前景。  图2 机械手表面的电子皮肤实物 作者简介 北京大学信息科学技术学院微纳电子学研究院,教授。 (责任编辑 王丽娜) |