2. 苏州大学机电工程学院,苏州215006
3. 北京航空航天大学生物与医学工程学院,北京100191
4. 北京航空航天大学机械工程及自动化学院,北京100191
2. School of Mechanical and Electrical Engineering, Suzhou University, Suzhou 215006, China
3. School of Biological and Medical Engineering, Beihang University, Beijing 100191, China
4. School of Mechanical Engineering and Automation, Beihang University, Beijing 100191, China
随着中国老龄化社会的到来,人口老龄化问题日益严重,老龄化带来的退行性疾病激增。2014年中国老年人超过2亿人,占总人口的14.9%,超过了联合国老龄社会的10%标准,中国面临着越来越突出的“未富先老”社会问题。同时,人口老龄化加剧残疾人群数量膨胀,尤其是老龄人生理机能衰退、心脑血管疾病、骨关节病、痴呆等发病率和致残几率增高。2010年,中国残疾人总数8502万,其中肢体残疾为2472万人,涉及家庭人口超2.6亿。中国老龄化社会的到来及民生健康的迫切需求和巨大市场,加速智能系统的飞速发展。
中国每年新发中风病患者200 多万,中风已成为全球范围内导致死亡的第三大诱因,也是造成永久残障的主要因素;1/3的中风幸存者由于神经功能损伤导致偏瘫,会丧失独立的运动能力、生活自理能力和工作能力。以步态康复为例,传统的康复治疗至少需要3名康复医师高强度地共同参与完成患者腿和躯干的康复训练,对任何国家的医疗保健系统而言,这种治疗方式需要大量受过良好训练的人员和资金投入,无论如何都是无法承受的。如图 1所示,面向老人与残疾人的智能健康与康复系统存在的迫切需求,有望成为康复领域的标准装备之一。

Fig. 1 Intelligent health system to help the old and the disabled medical rehabilitation
智能化成为人类健康及健康工程的重要需求,将为健康管理提供多维度的信息,使诊治基于个性化的信息展开,健康的保障实现本质上的发展。人们通过可穿戴智能设备或者植入式芯片随时随地与互联网交换信息,基于互联网的健康系统向着智能化、网络化、便携化等方向发展;无线互连将改变原有的医疗模式,健康管理将在无线互连的技术支撑下实现无时不在、无处不在,实现云健康管理;无线互连将在健康状态监测、远程即时诊断、个人健康信息即时查阅等方面获得广泛应用。同时,生物技术与虚拟现实技术拓宽了人类的感知与感觉渠道,许多科幻中的场景得以成为现实,人们可通过智能硬件实现疾病的远程诊断与实时监控。
基于医疗大数据的个体化诊疗、介入微创治疗将带来更加人性化和绿色治疗。更高性能医用植介入器械的发展,手术导航和医疗机器人的发展,生物三维打印技术的出现,智能硬件的急剧发展,促进现代医疗技术向微创、精确、个性化医疗方向发展成为必然趋势。以最著名的美国达芬奇微创手术机器人系统为例,每台售价约2000万人民币,目前全世界已经装机2600余台套,已经服务近50万人。从2000年上市以来,达芬奇微创手术机器人的年均复合增长率高达45%,2004年销售收入首次突破1亿美元,2009年突破10亿美元;2012年,伴随着第3代达芬奇手术机器人的贡献,其公司股价达到峰值594美元,较2002年上市初期上涨了30倍左右,并覆盖了美国的各大医院,2014年销售收入达到21.3亿美元。
疾病谱转变和老龄化正在催生健康工程领域的产业变革。肿瘤的治疗效果从根本上取决于肿瘤发现的时间,肿瘤等疾病治疗的智能化催生了早期诊断产业的发展,基因诊断、分子影像等预测性、精确性诊断产品大量产生,使得医学影像时空分辨率更高,对组织、器官成像更清晰、三维、动态,对疾病的诊断更精准。
用于组织修复与器官替代的、具有生物活性的新一代生物医用材料,生物信息控制助老助残技术,大量新型有源植入装置如疼痛控制器、神经控制器、癫痫脑起搏器等,将为开展重大疾病的诊疗及康复提供新的智能化手段;同时,针对新医改的需求,提供医疗专家与用户对接模式、医保报销模式、网络化诊疗模式等新型服务模式配套的智能化软件和设备,将为智能健康的发展提供制度和机制上的保障。因而,面向中国老龄化社会及民生科技的迫切需求,智能健康系统成为未来社会发展的必然发展趋势。
2 智能健康系统的内涵与特征互联网、大数据、人工智能、云计算、生物技术、虚拟现实等为代表的新一代信息技术的快速发展,推动中国医疗与健康系统的变革与融合。智能健康系统以智能化形成以人为中心的新型健康理念和模式,革新健康理论、技术和产品,催生新的健康服务手段及健康经济模态,为人类提供全生命周期的健康监护[1]。
如图 2所示,智能健康系统以“健康”的流程化管理为维度,包含防病、看病、治病、康复以及急救等阶段;其次,以“智能”的临床表现为维度,体现为个性化、低价化、网络化和智能化;再次,以“智能健康”的工程实现为维度,涉及基础理论突破、关键技术攻关、核心部件研制和整机开发。以疾病为中心向以健康为中心的医学模式转变,面向社区、家庭和个人的健康状态辨识和调控、疾病预警、健康管理、康复保健等已成为热点。

Fig. 2 Scope of intelligent health system
智能健康系统以提高生活质量为目标,探索利用工程技术变革医疗健康服务模式,并面向个人、家庭/社区、医院及社会,提供用于健康管理、疾病诊疗及康复过程的新一代技术、系统及平台,实现人类生活的个性化、低价化、网络化和智能化。
智能健康系统涵盖了从预防、诊断、治疗、康复等各个环节,并包含了医院、家庭、个人等组成部分,包含了微创外科医疗机器人,如腔镜微创手术、神经外科手术、整形外科手术、骨科手术、 精准放射机器人等;介入诊疗机器人系统包含了肠道机器人、血管机器人,以及耳、眼、心脏等人工器官;面向助老助残的康复设备包括肢体训练、按摩保健、智能假肢、智能轮椅等设备,以及教育物联网的便携式健康监护系统。
3 智能健康系统的基础科学问题与关键技术智能健康系统的基础科学问题主要包括多源生理信息感知与复杂生理-心理-环境一体化建模、基于医疗大数据的健康知识库与信息挖掘、个体化健康决策与管理、健康智能硬件信息安全管控机制、医用机器人精细操作机理与构型、医学虚拟现实与沉浸感人机交互、生物活性组织打印与生物相容性等,如图 3所示,需要在基础研究与机理研究方面加大力度,实现突破。

Fig. 3 Basic science and key technology of intelligent health system
健康大数据挖掘技术是指用于从群体数据中发现和描述健康特征和趋势的一系列过程和技术,实现对个体健康状况的长期持续性精准评估和诊疗,如图 4所示,包括健康云、医疗物联网/智慧医疗、医学信息数据库、医院信息系统、电子病历、电子健康数据交换等组成部分。
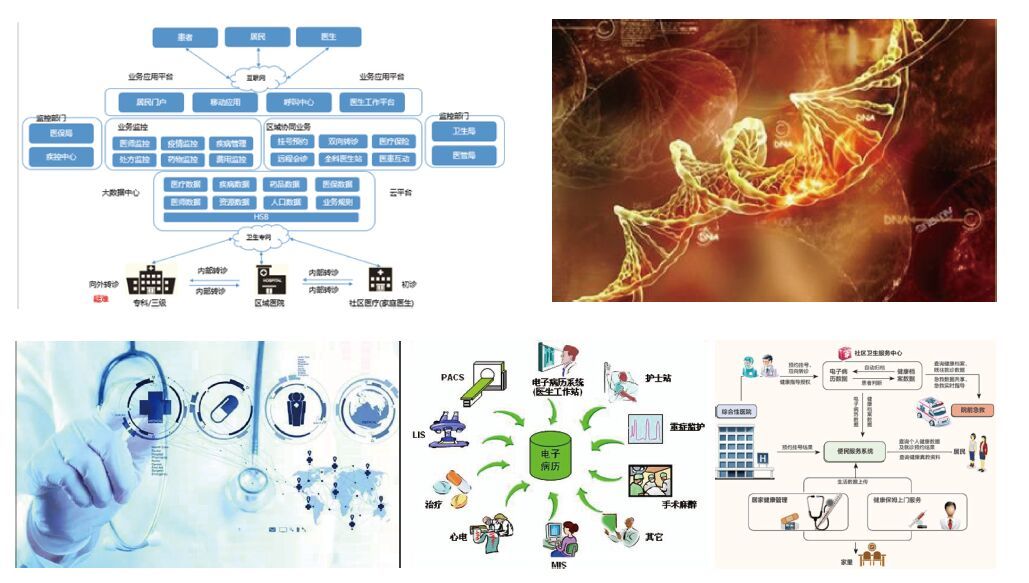
Fig. 4 Health and medical big data
健康大数据挖掘技术以巨系统、物联网、数据挖掘、中医工程等为基础,可带动临床医学信息学、中医科学和工程、健康管理学等医学知识发现为主的新型医学服务技术的飞速发展。将对疾病各种治疗手段的预后进行更加准确的判断,还将实现对个体健康管理的个性化。个性化的基因测序及其疾病基因预测、健康查体数据评估和健康管理、临床诊断及其个性化治疗方案等都需要新型的大数据解决方案。健康大数据挖掘技术将在慢病管理上首先获得突破,将促进医疗模式从关注疾病转向关注健康。
3.2 个性化植入/介入生物三维打印技术植入式医疗器械是保障人类健康的必需品,但患者在生理、病理等方面的个体差异要求植入式医疗器械必须个体化/个性化,可显著降低心血管病、创伤等重大疾病死亡率,提高患者生命质量,三维打印技术为个体化植入式医疗器械的发展提供了有效途径。
利用三维打印技术制作人工关节、人工器官、定制假肢、智能生物材料、生物打印等方面,受到全世界科学家的高度重视,正在形成生物三维打印产业,如图 5 所示。根据Lux Research 的预测,2012年生物三维打印市场仅1100万美元,2025年预计将高达19 亿美元。中国医疗器械产业对生物打印技术的重视程度日渐高涨,与之相关的打印材料、打印方式、个体化设计及评估等关键技术方面取得一定突破且技术发展极其迅速,面临的主要问题是缺乏相关的产品性能检测技术及规范、产品注册标准等。上述问题的解决将为临床医学的个体化、精准化和智能化发展带来革命性的改变。

Fig. 5 Personalized implant medical device 3D printing
精准诊疗是以个体化医疗为基础、随着基因组测序技术发展以及生物信息与大数据科学的交叉应用而发展起来的新型医学概念与医疗服务模式。美国总统奥巴马在2015年1月20日的国情咨文演讲中启动精准医疗计划。
个性化精确诊疗,可以适应患者在生理、病理等方面的个体差异性,可显著降低心血管病、创伤等重大疾病死亡率,提高患者生命质量。主要包括基因测序、靶向治疗、手术机器人、主动导管、胶囊式微型机器人等典型治疗方式与设备,如图 6所示。精准诊疗从基因层面,向着精准靶向治疗、三维打印、智能材料、医疗大数据、精密操作等多学科技术的交叉融合,个体化精准诊疗已涵盖了从微观到宏观层面的多种诊疗技术。

Fig. 6 Individualized treatment precision robots
中国网络与通信技术发达、市场空间巨大,互联网市场模式引领国际创新,但与之匹配的法律、伦理与安全措施,核心基础搜索和基础软件等相对不足。上述技术的进一步研究将为临床诊疗提供新型的手段、解决方案和服务模式,实现患者个体化精准诊疗。
3.4 生肌电融合及助老助残技术生肌电融合及助老助残技术是以人体生理信号、脑肌电信息、神经传导乃至情感等多模生物信息融合为手段来增强或替代人的能力,实现按照人的意图来主动控制助老、助残等可穿戴设备的能力替代和增强,达到人机合一(人机耦合)的境界,改变当前老人、残疾人生存模式和社会养老与残障保护体系,实现人类在个体肢体能力上的无差别化。如图 7所示,包括智能假肢、动力型外骨骼辅具、康复训练机器人、智能轮椅等典型设备与产品。
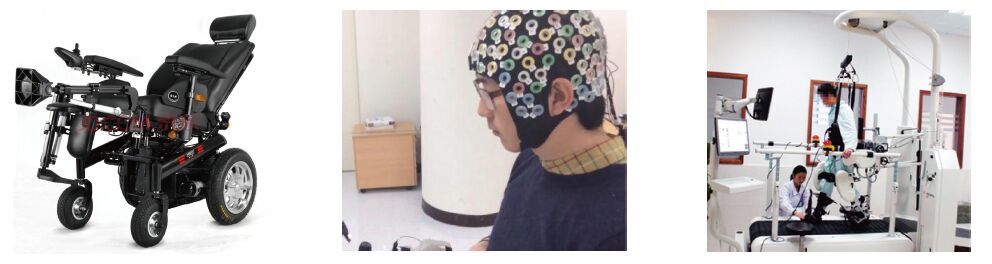
Fig. 7 Biological information control and HelpAge assistive robot
由于人的感知、认知、行为、生理结构、生物与环境相容性等个体特征与可穿戴设备的材料、传感、决策、控制等机器特性,只能在一定范围内发挥作用,所以人机交互时的耦合性能,决定了可穿戴设备功能的可用性、有效性及人的舒适性、健康、安全、效率等需求保证能力。
目前,世界范围内对脑科学研究日益深入,中国脑电技术研究取得突破性进展,生肌电融合技术领域已有较好的研究基础,但脑科学及生物信号机制、微纳信息传感与控制等基础研究相对滞后。上述技术的深入研究有望颠覆传统的生肌电认知,实现可穿戴或植入式设备的人机自然交互。
4 智能健康系统的研究现状与进展分析4.1 智能健康系统的国际发展现状与进展
国际上的智能健康领域正处在从以疾病为中心向以健康为中心的医学模式转变过程中,面向社区、家庭和个人的健康状态辨识和调控、疾病预警、健康管理、康复保健等方向已经成为研究热点。在智能健康系统的基础研究领域,人体复杂生理系统反应机理、精细操作机理与机构学、精准医学与基因组学、植入式器械生物相容性等受到广泛重视。
在多源生理信息感知与健康监测方面,哈佛大学医学院、德国弗莱堡大学等机构突破了经颅电刺激机理,日本东北大学重点研究了肌电形成机理[2];如图 8所示,在远程虚拟现实与力反馈人机交互方面,法国斯特拉斯堡大学在国际上首次验证了远程机器人手术的临床可行性,华盛顿大学开展了基于Raven 手术机器人平台的远程急救体系研究;加拿大麦克马斯特大学则对远程诊疗模式进行了深入分析;在健康智能硬件的网络化及信息安全管控机制方面,Medtronic 公司突破了便携式血糖仪的检测机理并开发了全球第一个血糖仪产品,谷歌公司和Bionym 公司研究了基于可穿戴模式的健康信息检测方法并分别研制了智能腕表和心电图测量腕带产品[3];在植入式智能医疗器械的生物相容性与个性化创成方面,美国美敦力公司在人工关节表面涂层、德国Biotronik公司在可吸收内植物、帝国理工大学在生物相容性等方面也取得重要突破,为实现植入式器械的长期在体安全性提供了理论和实验支持。

Fig. 8 Medical surgical robots and wearable health monitoring products
在智能健康系统的关键技术领域,大数据、纳米材料、物联网、传感器网络、云技术等新一代信息技术和3D打印、微机电、生物制造等新型工程技术正快速进入智能健康产业并融合发展,形成了生物3D打印、纳米医疗、健康物联网、健康大数据、医学电子与智能化等新概念和新技术[4]。关于多模态医学图像配与融合准技术,瑞士伯尔尼大学重点研究了多模影像实时配准与准确融合技术,美国卡耐基梅隆大学突破了多模影像引导手术技术,日本东京大学则在立体成像及增强现实技术领域取得重要突破;关于健康大数据挖掘技术,美国NIH(National Institutes of Health)、IBM等对群体健康数据进行了收集和分析,开发了一系列个体健康状况精确评估技术和方法。
智能健康系统的重点应用方向主要涉及疾病早期诊断与预警、微创/无创治疗、远程医疗、移动医疗、健康监护、康复及助老助残、健康信息化、网络健康顾问服务等方面[5]。如图 9所示,围绕疾病早期诊断与预警,以色列Given Imaging 公司和日本Olympus 公司分别开发了PillCam、EC TYPE 胶囊微型机器人产品,实现了健康的在体无创诊断,美国亚利桑那州立大学研制了基于DNA纳米技术的三维DNA纳米结构探针,实现了对基因和蛋白质的高性能检测[6];围绕微创/无创治疗,美国约翰霍普金斯开发了基于手术CAD/CAM理念的系列智能手术工具,帝国理工大学研制了Acrobot 骨骼成形手术机器人,华盛顿大学则开发了轻便型的主从式手术操作机器人Raven系统;围绕康复及助老助残,英国Argo 公司开发了著名的ReWalk外骨骼助行辅具,日本筑波大学开发了HAL外骨骼系统,美国UC Berkley将BLEEX外骨骼民用化为一种便携式康复辅具,应用前景广阔[7~9]。
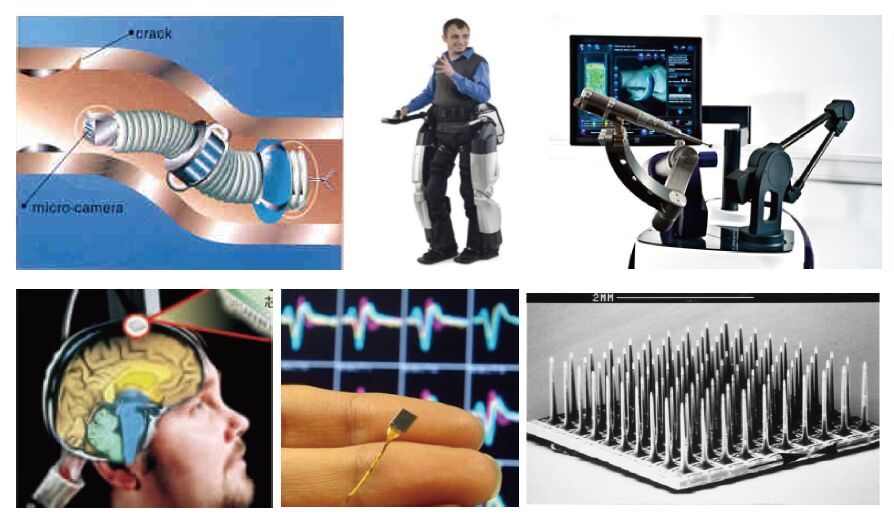
Fig. 9 Minimally invasive/non-invasive treatment robots and medical equipment
“十二五”期间,中国在智能健康系统相关的基础研究、关键技术及重点应用等方面进行了科学布局。仅科技部就在医学影像、体外诊断、先进治疗、医用材料等领域投入经费逾20亿元,支持了“基于影像的脑网络研究及其临床应用”、“聚焦超声无创治疗肿瘤的关键科学问题研究”、“新型医用材料的功能化设计及生物适配基础科学问题研究”等“973计划”;“数字化医疗工程技术开发”、“微创外科新技术研究及产品开发”、“体外诊断技术产品开发”、“新一代基因测序仪及配套产品研发”等“863计划”以及“无创检测、实时监测等新型医疗器械产品研发”、“影像导航、手术机器人等先进治疗装备研发”等国家科技支撑计划,取得一系列自主原创、从无到有、从低端到高端、从高端到普惠的重要突破,整体呈现出创新能力从弱到强、关键技术从低到高、重大产品从无到有、产业发展从小到大、普及推广由少到多的良好发展趋势。
智能健康领域的竞争正在向技术、人才、管理、服务、资本、标准等多维度、全方位拓展。通过“十二五”建设,中国已经初步建立了医疗健康产业科技创新体系,并在部分基础研究达到了国际一流水平,部分产品达到国际先进水平,但整体上仍处于跟踪模仿阶段,同国际先进水平仍有较大差距,主要体现在基础性突破不明显,关键技术成果难以物化,关键核心部件仍依赖进口,自主研发核心部件的性能和可靠性难以匹敌国际水平,在产业竞争中处于不利地位;产业集中度、品牌知名度不足,跨学科、产学研医协同创新能力有待提高。因此,迫切需要改进创新模式,提高中国智能健康系统的关键技术和核心部件的自主创新能力和产品国产化程度,并增强产业国际竞争力。
当前,国内已拥有一批优势研究机构、领军人物和团体,并拥有多种创新成果。在多源生理信息感知与健康监测方面,清华大学和北京品驰公司联合研制了植入脑起搏器产品,成为全球第二家、中国第一家在原产国获得脑起搏器注册证的企业;在远程虚拟现实与力反馈人机交互方面,上海交通大学建立了Med-X 医学中心,并创新了多种人机交互模式;在健康智能硬件的网络化及信息安全管控机制方面,华为、腾讯等公司开发了智能腕表微平台等,用于监测患者治疗效果;在植入式智能医疗器械的生物相容性与个性化创成方面,清华大学开发了用于人体组织器官构建的系列三维受控成形设备和工艺,四川大学、北京纳通集团等在生物材料相容性、个性化人工关节、人工器官等领域取得重要突破并形成创新产品;在多模态医学图像配与融合准技术方面,中国科学院自动化研究所开发的MITK 等医学影像处理软件平台已被国内外广泛使用,复旦大学等开发的手术导航产品已广泛用于临床;在健康大数据挖掘技术方面,基于临床大数据,电子科技大学、北京大学第三医院、中国科学院软件研究所所等开展了大量研究,成果以用于临床;在疾病早期诊断与预警方面,重庆金山科技(集团)有限公司的胶囊机器人、北京博奥生物芯片有限责任公司开发的智能生物芯片已大面积推广;在微创/无创治疗方面,如图 10 所示,北京航空航天大学、哈尔滨工业大学等开发的骨科手术机器人已获得医疗器械三类注册证并实现产品销售,天津大学开发的妙手机器人也已进入产品报批程序[10~16];在康复及助老助残方面,哈尔滨工业大学等单位开发了多种康复机器人系统、北京航天航空大学开发了智能轮椅床、陪护机器人等,均已开展示范应用[17~19]。
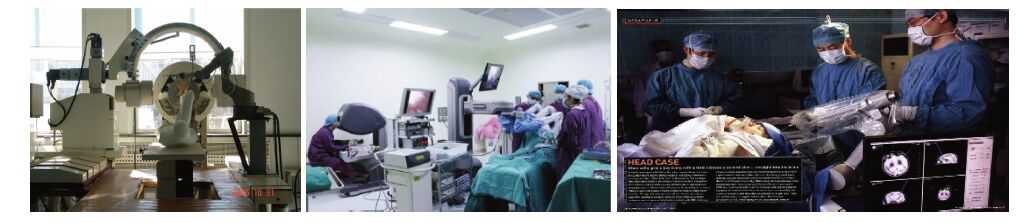
Fig. 10 Domestic medical surgical robot
智能健康能够以智能化形成以人为中心的新型健康理念和模式,以提高生活质量为目标,面向个人、家庭/社区、医院及未来社会发展,涵盖防病、看病、治病、康复等阶段,创新健康管理、疾病诊疗及康复过程的新技术、新系统及平台,实现人类未来社会生活的个性化、低价化、网络化和智能化。本文介绍了面向中国老龄化社会与民生科技发展必需,提出了智能健康系统的内涵与基本特征,介绍了智能健康系统的基础科学问题及关键技术,阐述了国内外研究前沿、热点与进展情况,为智能健康系统的发展提供参考与借鉴。
| [1] | 尚勇. 加快机器人科技和产业创新迎接即将到来的智能社会浪潮[N]. 科技日报, 2015-04-20. Shang Yong. To speed up the robot technology and industrial innovation and meet the coming wave of intelligent society[N]. Science and Technology Daily, 2015-04-20. |
| [2] | 宋瑞岭. 生物机电一体化假肢手的仿真系统[D]. 上海:上海交通大学, 2008. Song Ruiling. Simulation for biomechatronic prosthetic hand[D]. Shanghai:Shanghai Jiao Tong University, 2008. |
| [3] | Patel S, Park H, Bonato P, et al. A review of wearable sensors and systems with application in rehabilitation[J]. Journal of Neuroengineering & Rehabilitation, 2012, 9(12):1-17. |
| [4] | Grayson A C R, Shawgo R S, Johnson A M, et al. A BioMEMS review:MEMS technology for physiologically integrated devices[J]. Proceedings of the IEEE, 2004, 92(1):6-21. |
| [5] | Cao H, Leung V, Chow C, et al. Enabling technologies for wireless body area networks:A survey and outlook[J]. Communications Magazine, IEEE, 2009, 47(12):84-93. |
| [6] | 郭洁. 华生恒业:国际领先的基因分析服务提供商[J]. 国际融资, 2014(7):24-25. Guo Jie. Todaysoft:Providing international leading genetic analysis service[J]. International Finance, 2014(7):24-25. |
| [7] | Chan M, Estève D, Fourniols J Y, et al. Smart wearable systems:Current status and future challenges[J]. Artificial Intelligence in Medicine, 2012, 56(3):137-156. |
| [8] | Mohammed S, Amirat Y, Rifai H. Lower-limb movement assistance through wearable robots:state of the Art and challenges[J]. Advanced Robotics, 2012, 26(1-2):1-22. |
| [9] | 许红敬. 开启蓝海之旅有关可穿戴设备的机遇和赌注[J]. 消费电子, 2013(17):34-41. Xu Hongjing. Open the exploration of blue ocean:Opportunities and bet about wearable devices[J]. Consumer Electronics, 2013(17):34-41. |
| [10] | 王树新, 刘玉亮, 李进华, 等. 腹腔微创手术机器人远程控制平台开发及实验[J]. 天津大学学报:自然科学与工程技术版, 2015(12):1041-1049. Wang Shuxin, Liu Yuliang, Li Jinhua, et al. Development and experiment of a tele-operated platform for minimally invasive laparoscopic surgery based on microhand robot[J]. Journal of Tianjin University:Science and Technology, 2015(12):1041-1049. |
| [11] | 赵枝凯. 机器人辅助远程骨科手术时延控制研究[D]. 哈尔滨:哈尔滨工业大学, 2013. Zhao Zhikai. Research on time-delay control for robot-assisted remote orthopedic surgery[D]. Harbin:Harbin Institute of Technology, 2013. |
| [12] | 王满宜, 王军强. 计算机辅助导航骨科手术及医用机器人技术在创伤骨科的应用[C]//2006年骨科新进展研讨会. 2006:1004-1009. Wang Manyi, Wang Junqiang. Medical robots and computer assisted navigation used in surgery of orthopaedic trauma[C]//New progress in orthopaedic seminar in 2006. 2006:1004-1009. |
| [13] | 宋爱国. 力觉临场感遥操作机器人(1):技术发展与现状[J]. 南京信息工程大学学报:自然科学版, 2013, 5(1):1-19. Song Aiguo. Force telepresence telerobot(1):Review of the history and development[J]. Journal of Nanjing University of Information Science and Technology:Natural Science Edition, 2013, 5(1):1-19. |
| [14] | 徐兆红, 宋成利, 吴文武. 微创外科机器人力反馈跟踪控制[J]. 生物医学工程学杂志, 2012, 29(3):407-410. Xu Zhaohong, Song Chenli, Wu Wenwu. Haptic tracking control for minimally invasive robotic surgery[J]. Journal of Biomedical Engineering, 2012, 29(3):407-410. |
| [15] | 徐武夷, 杨文, 卢旺盛. 机器人远程手术研究状况与展望[J]. 转化医学杂志, 2015(2):94-96. Xu Wuyi, Yang Wen, Lu Wangsheng. Status and prospect of research on robot remote operation[J]. Translational Medicine Journal, 2015(2):94-96. |
| [16] | 高宝丰, 郭书祥. 现代医工学机器人技术在介入医疗及康复系统的应用研究[C]//第三届机器人产业链创新与发展及科技成果产业化推进科技论坛. 2014. Gao Baofeng, Guo Shuxiang. Robot technology of modern medical professionals in health care and rehabilitation system of applied research[C]//The Third Robot Industry Chain Innovation and Development and Industrialization of Scientific and Technological Achievements to Promote Science And Technology Forum. 2014. |
| [17] | 邢凯, 赵新华, 陈炜, 等. 外骨骼机器人的研究现状及发展趋势[J]. 医疗卫生装备, 2015, 36(1):104-107. Xing Kai, Zhao Xinhua, Chen Wei, et al. Research situation and development trend of robot exoskeleton[J]. Chinese Medical Equipment Journal, 2015, 36(1):104-107. |
| [18] | 龙亿, 杜志江, 王伟东. 基于人体运动意图卡尔曼预测的外骨骼机器人控制及实验[J]. 机器人, 2015, 37(3):304-309. Long Yi, Du Zhijiang, Wang Weidong. Control and experiment for exoskeleton robot based on kalman prediction of human motion intent[J]. Robot, 2015, 37(3):304-309. |
| [19] | 陈伟海, 徐颖俊, 王建华, 等. 并联式下肢康复外骨骼运动学及工作空间分析[J]. 机械工程学报, 2015, 51(13):158-166. Chen Weihai, Xu Yingjun, Wang Jianhua, et al. Kinematics and workspace analysis of parallel lower limb rehabilitation exoskeleton[J]. Journal of Mechanical Engineering, 2015, 51(13):158-166. |