
蔡自兴, 中南大学信息科学与工程学院教授, 国际导航与运动控制科学院院士、 纽约科学院院士, 2014年吴文俊人工智能科技奖“成就奖”获得者。中国人工智能、智能控制、智能机器人学的学术带头人之一,被誉为“中国智能科学的开拓者”“中国智能控制的奠基者”“智能机器人学科的创始人” 和 “中国人工智能教育第一人”。
对话中国智能机器人学开拓者——蔡自兴
2014年,蔡自兴获得中国人工智能领域的最高奖项——吴文俊人工智能科技奖 “成就奖”。颁奖词写道,“他是一位敢为人先的开拓者,首先在我国人工智能、智能控制、机器人学的 3个学科群构建理论体系和基础课程,他用科学实践的方法论,推动着我们智能科学技术教学与研究的新发展”。 自 20世纪 80年代初,蔡自兴开始对机器人学产生了浓厚兴趣,当时,国内机器人学的研究与教学均未正式起步。1983年,蔡自兴前往美国普渡大学电气工程系高级自动化实验室和内华达大学电气工程与计算机科学系机器人研究中心学习研究机器人学, 1985 年学成回国,开始为我国机器人学的建立、建设和发展做了大量开拓性工作。 之后带领科研团队攻关克难,进行智能移动机器人研究,取得了丰硕研究成果;他牵头建立了中国人工智能学会智能机器人分会,是我国智能机器人学科的开拓者和智能机器人教育与研究的先行者。 时隔 40年,国内机器人学取得了很大进展,智能机器人更多地应用在各种场合之中。在 2015世界机器人大会召开前夕,《科技导报》专访了这位中国智能机器人学的开拓者,与他一起回顾 40年来机器人学的发展历史,展望机器人学的未来。 《科技导报》(以下简称《科》): 1984年,你率先提出机器人规划专家系统,实现了人工智能专家系统技术与机器人技术的结合。你是如何提出这个思想的,它对机器人学的发展意义何在? 蔡自兴(以下简称蔡): 1983—1985 年,我作为国家派遣的访问学者,赴美国研究机器人学和人工智能。在普渡大学,师从美国国家工程科学院院士傅京孙教授学习与研究这两门当时十分前沿、现在仍然非常先进的学科。在研修过程中,我冥思苦想如何把人工智能基本理论和技术用于机器人学研究,实现人工智能与机器人学的结合。我提出的应用专家系统理论和技术进行机器人高层规划的设想,得到傅教授的赞同与支持,取得了突破性研究成果。 1985年回国后,我继续深入研究, 先后完成了机器人任务规划、机器人避障运动路径规划、机器人柔性装配规划、机器人零件运送规划和多机器人协调运动规划等研究,提高了规划性能, 这些对于提高生产自动化和智能化水平具有重要意义,在一定程度上推动了国内外机器人规划研究的发展。没有想到,这是国际上开发的第一个用于机器人高层规划的专家系统,实现了人工智能专家系统技术与机器人技术的结合,为基于知识的生产过程自动规划和高层控制开辟了一条新途径。 《科》:现代机器人学研究的一个重要方面是如何使各种机器人更智能,能否请你谈一下高级智能机器人的智能控制理论技术的难点在哪里? 蔡:智能机器人,包括智能机器人的控制研究,的确面临不少困难与挑战。一方面,智能机器人要处理的任务比一般工业机器人的任务更为复杂和困难;另一方面,人工智能技术以及其他与机器人学相关的技术,并不是随便就可以应用于机器人系统的。寻找适宜的智能控制技术用于相关的智能机器人系统控制是研究者面临的一个艰巨而又实实在在的任务, 这应该是高级智能机器人智能控制理论的技术难点所在。例如, 要解决智能移动机器人的导航控制问题, 到底采用哪一种智能技术?如果采用计算智能技术, 又到底使用什么计算方法?这需要研究者通过理论与实践, 反复尝试才能解决。 《科》: 你首先在我国人工智能、 智能控制、 机器人学3个学科群构建理论体系和基础课程, 请谈一谈你的这些研究是如何将3个方面有序结合的? 蔡: 我本科是学习自动控制的, 这是我的知识基础。后来我于 20世纪 80 年代和 90年代 2次出国研究人工智能、 机器人学和智能控制, 面临新的学习任务与研究课题。经过长期深入学习和刻苦钻研, 我抓住了学科的关键及相关学科的内在联系, 发现人工智能理论和方法是智能控制与机器人学研究与应用的重要基础, 而智能控制与机器人学是人工智能的两个十分 “友好” 的应用领域与试验场。我研究的 “智能控制四元交集结构理论” 和 “机器人学三元结构理论” 思想都是在人工智能理论指导下取得的。我们科研团队进行的智能移动机器人研究都是创造性地应用人工智能技术特别是计算智能技术的结果。在人工智能、 智能控制、 智能机器人中, 三者关系极为密切, 有序结合。 我的智能科学研究, 是以人工智能理论和技术为指导、 以自动控制和智能控制为基础、 以机器人学特别是移动智能机器人为应用背景展开的。 《科》: 你在从事研究工作之余, 不失时机地传播机器人学知识, 对机器人学在中国的普及工作做出很大贡献。 1987 年出版的科幻中篇小说《机器人王国考察记》 影响力尤为突出, 也对机器人学的研究带来了新的思路。虽然目前机器人已经在工业、 医学等领域广泛应用, 但还未能普及到公众的生活, 在你看来, 机器人走入人们的日常生活还需要多长时间? 蔡: 机器人, 包括工业机器人和服务机器人等, 能够极大地减轻人类的体力劳动和智力劳动强度, 使人类最大限度地摆脱危险的劳动。现在, 工业机器人已遍及各行各业, 服务机器人即将进入各种服务业和千家万户。可以预期, 机器人即将很快全方位进入大众的日常生活, 为百姓提供周到的服务。 要让机器人真正普及到日常生活中, 突破口包括: 第一, 面向人类需求进一步提高机器人的技术水平, 包括平稳性、 可靠性、 通用性和舒适性等; 第二, 进一步开发新一代人-机-机器人 “三元” 接口, 实现简易、 方便、 安全、 亲和、 环保等技术保障; 第三, 进一步降低机器人成本, 使公众能够买得起、 用得上; 第四, 进一步发展生产, 提高国民收入, 为普及使用机器人打下经济基础。 《科》: 随着机器人越来越广泛地进入公众的生活, 机器人与人类关系的变化值得深思。而您早在 《机器人学》 杂志上就曾提出过这样的思考: 机器人与人类的关系会不会发生根本性变化? 经过这么多年的研究, 现在你怎么看待这个问题? 蔡: 史蒂芬·霍金曾多次警告说, “未来 100 年内, 人工智能将比人类更为聪明, 机器人将控制人类。” 这一直是学术界、 科技界甚至全社会长期以来争论不休的问题, 谁胜谁负难有定论。 人工智能已在许多科技领域 “超过” 人类智能, 如计算速度、 博弈能力等。不过, 这些 “智能” 都是人类开发与设计的, 是人类赋予的。人类具有的自然情感与灵感、 社会 “公德”、 自繁殖、 自供能等能力, 都是机器人所没有的, 在未来 100 年内人工智能无法解决, 100 年后也难以解决, 就更不要谈在总体上 “比人类更聪明” 和 “控制人类” 了。 1997年我在中国第五届机器人学术会议上以 “机器人的进化与智能机器人” 为题的大会报告中提出: 机器人学是一门高度交叉的前沿学科。在诸多相关学科 (科学) 中, 关系最为密切的是机械学、 人类学和生物学。图 1表示出它们之间的学科内在关系, 即学科结构图, 我们称之为机器人学的三元交集结构图。 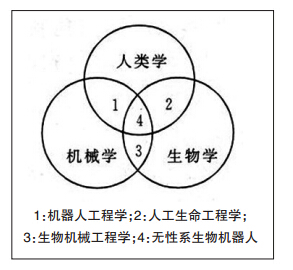 图1 机器人学的三元交集结构图 大部分工业机器人和行走机器人, 是模仿人类上肢和下肢功能的机器人或机械人, 是机械人工程学的研究领域。应用生物工程 (包括遗传工程或基因工程)技术研究人类生命和生殖问题, 是机械学与人类学交叉的人工生命工程学的研究范畴; 如果把生物视为一种内含 DNA(脱氧核糖核酸)链的特种机械装置, 那么人类学与生物学交叉的人工生命工程学是研究有生命的机器人问题。而生物学与机械学的交集, 产生了生物机械工程学, 研究仿生机械和机器人。 人类学、 生物学和机械学三者之交集部分, 即图 1中的 “4” 区域, 是研究用生物工程方法和技术制造拟人机器人, 即无性系生物机器人或无性系人, 也可称为克隆人。这应是研究的一个禁区, 也是目前人们极为关注和激烈争论的一个研究领域。 人类从幻想能够制造出像人一样的机器, 到百万机器人的 “机器人王国” 或 “机器人家族” 的现实, 经历了三千多年历史。从第一台工业机器人的诞生到克隆哺乳动物的出现, 只经历了短短的 30多年。这足以说明现代科学技术的飞跃发展。面对可能制造出真正的 “人工人” 或克隆人的现实, 我们不得不对机器人学的一些根本问题进行重新审议与研究。到底什么是机器人?机器猫和克隆羊是否都属于机器人范畴?机器人的进化与人类的进化是否有本质的差别?机器人智能与人类智能是否能相提并论?克隆技术是否属于人工智能?机器人与人类的关系会不会发生根本性变化?所有这些问题都值得展开讨论与研究, 并得出结论或取得共识。这些是我正在思考并希望机器人学研究人员探讨的问题, 也是我对史蒂芬·霍金上述命题的反问。 《科》: 作为中国机器人早期研究的领军者, 你被誉为 “中国智能机器人学科的开拓者”, 你对当前中国机器人领域的研究、 对从事机器人研究的年轻后辈们有什么样的意见和建议呢? 蔡: 关于当前中国机器人研究, 建议国家专门制订中国机器人学路线图、 严密组织国内各方力量形成机器人学的研究开发与产业合力, 高度注意建立中国自己的机器人学知识产权; 设计与制造高质量的国产机器人产品并占领国内外机器人市场; 努力培养大批高素质的各级机器人学人才, 实现中国机器人学的强国之梦。 当前我国从事机器人学研究与学习的年轻人数以万计, 他们是我国机器人学研究开发的生力军, 是追逐与实现我国机器人学强国梦的希望所在。在国内外机器人学热潮的面前, 他们受到极大鼓舞, 正在或即将为我国机器人学的发展做出重要贡献。借此机会, 我想对他们提几点建议。 第一, 机器人学是一门高度交叉的前沿学科, 也是一门高新技术, 要树立中国机器人学强国梦的理想, 勇敢地接受困难挑战, 在克服困难中前进。 第二, 要追求创新, 掌握机器人学的核心技术, 拥有自己的知识产权。 第三, 在开发研究过程中要学会打持久战, 力戒浮躁, 树立精品意识, 精益求精地打造机器人精品, 脚踏实地一步一个脚印地迈向目标。 第四, 年轻人的成长需要国家的关怀培养和老一代机器人学专家的言传身教, 要培养大批机器人学学科带头人、 技术精英和能工巧匠, 发挥团队集体作用, 团结合作, 攻坚克难。  2014年 6月 24日,日本全国新兴科技展媒体观摩在东京全国博物馆举行。图为新型智能美女机器人 “OTONAROID” (左)和 “KODOMOROID” 与两名科学家在一起。 (新华社/西霸) 文/刘志远 作者单位:《科技导报》编辑部。 (责任编辑 李娜) |