
A Review of Current Research and Advances in Unmanned Surface Vehicles
https://doi.org/10.1007/s11804-022-00276-9
-
Abstract
Following developments in artificial intelligence and big data technology, the level of intelligence in intelligent vessels has been improved. Intelligent vessels are being developed into unmanned surface vehicles (USVs), which have widely interested scholars in the shipping industry due to their safety, high efficiency, and energy-saving qualities. Considering the current development of USVs, the types of USVs and applications domestically and internationally are being investigated. USVs emerged with technological developments and their characteristics show some differences from traditional vessels, which brings some problems and advantages for their application. Certain maritime regulations are not applicable to USVs and must be changed. The key technologies in the current development of USVs are being investigated. While the level of intelligence is improving, the protection of cargo cannot be neglected. An innovative approach to the internal structure of USVs is proposed, where the inner hull can automatically recover its original state in case of outer hull tilting. Finally, we summarize the development status of USVs, which are an inevitable direction of development in the marine field.Article Highlights• Existing applications and models of unmanned ships are evaluated by literature review. At the moment, most of them are small and are used to measure some needed data, and large unmanned vessels are still in the development stage.• The maritime supervision of unmanned surface vehicles (USVs) is discussed. Old regulations do not meet the profile of unmanned vessels.• Three key technologies are reviewed, ie., USV information collection, USV motion model and control, and USV path planning and navigation stability.• Finally, the design trend is analyzed for USV internal structure, which enables cargo to be stored independently and ensures the stability of the cargo transported during the ship's navigation. -
1 Introduction
The development of autonomous control technologies in recent years has seen scholars constantly improving the research status of unmanned control technologies in industrial automation, ground transportation, military, air, and maritime activities. For example, unmanned ground vehicles and wheeled robots are widely used in industrial automation, warehouse management, space material detection, lunar rovers, rescue missions, intelligent transportation, and military operations (Arai et al., 2002; Farinelli et al., 2004; Yuan et al., 2007).
In terms of ships, the development of the world economy has to date resulted in the use of various levels of technologies that are gradually increasing in complexity and are constantly developing to facilitate greater specialization. Under the umbrella of big data, with the development of ship sensor technologies and other computer sciences, normal ships will eventually become intelligent unmanned surface vehicles (USVs).
Many scholars have researched the hull structures of USVs, in addition to information acquisition, independent decision-making and other aspects. However, there are some loopholes in the international regulation of USVs. A particular point of concern is the fact that there will be no sailors onboard; therefore, USVs must be stable and have a higher level of intelligent technology support to ensure its safety while under way.
In this paper, the automation level of USVs, the research status of USVs, an existing model, and key technologies of USVs are summarized. The gaps in the regulation of USVs are highlighted and a proposal for the internal structure design of USVs is presented.
2 USV Necessity and automation
2.1 Necessity for USV development
Following advances in the electronic and electrical industries, the information technology capabilities of ships have improved significantly. However, maritime traffic must consider more factors than land traffic when operating in their respective environments. Emergencies easily occur when ships are at sea, such as when failed electrical equipment cannot be repaired in time, the ship may not have enough power to avoid bad weather, the crew's safety may be put at risk, and the ship may suffer structural damage, all of which will cause economic losses.
The sea environment is changeable and harsh. If there is a problem in the reception of the ship's positioning signal, it is easy to deviate from the intended course and waste large quantities of fuel. This will put the ship in danger and threaten the safety of the crew, with possible economic loss.
To solve the shortage of crewed ships and promote the use of science and technology in shipping, the development of ships toward more advanced and intelligent autonomous control using independent collection of surrounding environmental information, route design, and route planning can be achieved. These ships can also be used to perform work in areas where humans cannot reach.
2.2 USV automation definitions
Both USVs and traditional ships have floating capacity, they maneuver on water, can be used for transporting persons or goods or both, and are engaged in maritime navigation (Xu et al., 2021). The USV uses a variety of sensor technologies to obtain information about the marine environment around the ship. An autonomous system is used to control the ship instead of its crew's skills. Ships' autonomous systems were defined by the International Maritime Organization (IMO) at the 99th Maritime Safety Committee Conference held in 2018 as systems that use artificial intelligence or computer programs to manage and control ship functions independently of personnel supervision and control (Sun et al., 2020). USVs were defined as ships that can operate with varying degrees of crew control.
2.3 USV automation level
Ship automation is divided into seven levels, ie., AL0- AL6, in Wrobel's (2016) Ship Right Program Guide (Krzysztof et al., 2018; Wrobel et al., 2018). In an article published by the Norwegian Forum for Autonomous Ships, Rødsethø (2017) divided the level of ship autonomy into four categories. A Danish Maritime Authority (DMA) report (2017) mentions four levels of autonomous control for ships, including M, R, RU, and A levels.
In 2017, the Industry Code for Design, Construction and Operation of Autonomous Maritime System was issued by the Maritime Autonomous Systems Regulatory Working Group (MASRWG), which divided ships' autonomous control into six levels in terms of control behavior ability (MASRWG, 2017). The Guidelines for Autonomous Shipping (Bureau Veritas 2017) divided autonomous control into five levels. At the 99th Maritime Safety Committee Conference, the IMO adopted the ship autonomy levels from the DMA's analysis report (Zhou et al., 2019).
The IMO made a preliminary definition of ship automation level based on mass divided into four levels: Level 1: some operations are autonomous; Level 2: remote control and partial crew control; Level 3: fully remote controlled; and Level 4: fully autonomous control.
Scholars currently mainly focus on shore-based remote control of autonomous ships by obtaining their navigation status using signal transmission data. Autonomous unmanned ships are expected to sail by themselves with the help of artificial intelligence. Further research into these two fields of interest is needed.
3 Research status of USVs
3.1 Existing USV studies
Scholars are increasingly studying USVs as a new product area. In terms of intelligent operation and maintenance, Yang (2015) analyzed USVs with ship or shore-based systems. Wu (2017) described the research status, advantages, existing problems, and technical difficulties of USVs. Liu (2021) analyzed the stability of power plants, navigation techno- logy, automatic obstacle avoidance, and development trends, advantages, and problems.
In terms of unmanned technology, Fu (2015) combined ground unmanned technology to analyze unmanned ship systems. Gong and Ji (2016) analyzed ship identification and tracking technology and proposed requirements for functions and technologies for autonomous control. Ye (2017) analyzed the technology, advantages, and characteristics of autonomous control. Su et al. (2018) analyzed USVs' perceptive technology, supervision, and path planning.
In terms of USVs' technical framework, Wang et al. (2018a) established the overall architecture based on e-Navigation applications and proposed a maritime cloud-based network framework. Liu (2021) designed a hardware system, a sensor-sensing module, a control system circuit, and a heading control system workflow. Lv et al. (2021) proposed a distributed model using predictive control method based on an extended state observer to realize distributed formation tracking control for underactuated USV collision avoidance.
Sun et al. (2021) used delay compensation and normal distribution of a control set to balance the contradiction between calculation and guidance accuracies, and collision avoidance guidance and control based on adaptive sliding model control theory, which was adapted to resist the influence of strong disturbance and realize collision avoidance guidance and control of the boat.
3.2 Application and model of foreign USVs
At present, USVs are mainly underwater robots, small sub-marines, or small surface boats. USVs with higher intelligence still must be crewed. Most USVs are used for ocean information collection, sample collection, measurements, or special military missions. The lengths of small USVs are about 2-5 m and their speed in quiet water is about 40 kn. They are lightweight and can only carry a small amount of goods. The related technology is relatively mature for small USVs (United States Navy 2007). Most large USVs are still in the development, construction, or testing stages.
In 1898, Tesla registered wireless control technology and demonstrated a robot ship to the public. This was considered to be the first unmanned ship.
In 1961, the "Jin Hua Shan Wan" bulk carrier was built in Japan with centralized cabin control and remote control.
In the 20th century, the United States (US) developed USVs to realize the functions of maritime target searching and monitoring (United States Navy, 2007). Vasudevan and Baskaran (2021) used USVs to provide relevant data support for water-quality detection.
Israel, which is the second leading country in USV technologies after the US, built the Protector USV during the early 21st century and troops have now been equipped with it (Chen, 2019).
In April 2016, Finland Rawls announced that the Advanced Autonomous Waterborne Applications Initiative would be used and tested on Stella.
The Microtransat Challenge was launched in 2005, where unmanned vessels attempted to cross the Atlantic. More than 20 boats sank up during the challenge. However, an unmanned vessel named SB Met left Newfoundland, Canada on June 7th and arrived in Northern Ireland on August 26, 2018.
Campbell et al. (2012) described the Measuring Dolphin (MESSIN) developed by the University of Rostock in Germany. The Italian Institute of Intelligent Automation Systems developed an autonomous catamaran called Charlie for collecting sea surface samples (Bibuli et al., 2008). As shown in Figure 1(a), the Springer USV was built by the University of Plymouth, UK, for environmental and hydrological surveys of coastal waters.
 Figure 1 USV model
Figure 1 USV modelAs shown in Figure 1(b), the US placed weapons on their USVs and piloted a new unmanned antisubmarine ship which named Sea Hawk in 2016. Table 1 presents a timeline of applications and types of foreign USVs
Table 1 A timeline table of application and model of foreign USVTime Creator Country or institution Application or model of USV 1898 Nikola
TeslaUSA - 1961 - Japan Jin Hua Shan Wan 20th century - USA Maritime target searching and relevant data support for water quality detection Early 21st century - Israel Protector USV 2016 - Finland Rawls AAWA project used on Stella
USV2016 - USA Sea Hawk 2018 - Canada SB Met - - University of Rostock Measurement dolphin - - Italian institute of intelligent automation systems Charlie USV - - University of Plymouth Springer USV 3.3 Application and model of domestic USV
Compared with China, foreign research on USVs began at an earlier stage during World War Ⅱ. The technology developed rapidly during the Cold War between the US and the then Soviet Union. Although China started USV research late compared with the rest of the world, Chinese developments have gone from the conceptual phase to practical applications.
In 1985, the Hudong Shipyard built a container ship called the Berlin Express, which was equipped with automatic navigation and other intelligent systems and equipment. Yunzhou designed the first USV for environmental measurement in addition to the first stealth USV in China. Developed by Shenyang Xinguang Company, the USV Tianxiang I was used to provide meteorological information for the Qingdao Olympic Sailing events at the Beijing Olympic Games. From 2009 to 2018, the USV research group of the First Institute of Oceanography of China had developed two "Jiu Hang" series USVs (Cao and Wang, 2018). Zhao et al.(2021) used the ESM30, which is a small USV with sensors, to sample and analyze the water quality of the inland river in Zhangpu Town in Kunshan City (Figure 2). Ning (2021) used an unmanned measuring ship to measure underwater terrain in the downstream of the Fen River Reservoir in Shanxi. A timeline of applications and types of domestic USVs is presented in Table 2.
 Figure 2 Esm30 USVTable 2 A timeline table of application and model of domestic USV
Figure 2 Esm30 USVTable 2 A timeline table of application and model of domestic USVTime Creator Country or institution Application or model of USV 1985 - Hudong Shipyard Berlin Express - - Yunzhou The first USV for environmental measurement and the first stealth USV - - Shenyang Xinguang Company Tianxiang I 2009-2018 - The First Institute of Oceanography Jiu Hang 2021 Zhao Tongsheng - Water quality sampling 2021 Ning Xinlong - Measurement of underwater terrain Considering the above USVs types, China is relatively new to USV development compared with foreign countries because most foreign developers had begun their research on technologies related to USVs considerably earlier than China.
4 Advantages and problems of USV
In the future, USVs are expected to be an important part of the ship industry. Considering hull construction, ship operations, and other businesses, the application of USVs has changed the ship industry greatly. In addition, if all classes of ships were replaced by USVs, hundreds of sailors would be out of work. However, the shipping industry would experience a boom period.
4.1 USV advantages
Compared with crewed ships, USVs have obvious advantages because they are equipped with more intelligent equipment in communication, observation, perception, computing, and other aspects, and they can improve the safety and reliability of ships' navigation.
Crews are no longer required with USVs, which can save labor. Space is usually restricted on USVs; therefore, many ships cannot carry recreational facilities or have wireless networks. Crew life at sea is monotonous and it is easy to suffer from mental illness. In addition, crews cannot meet their families for a long time and staying away from land makes it difficult to recruit sailors, which is a big problem for shipping companies.
Thus, USVs solve a major problem for shipping companies because they do not need crew to work onboard, which reduces the cost of crewing ships. Unmanned ships do not need as many lounges and other cabins as crewed ships, which would not only free up space for more cargo, but can also reduce the weight of the ship, make the ship more flexible and easier to control, and reduce the fuel required for propulsion to achieve energy-saving and consumption-reduction benefits.
Intelligent route design is used to automatically plan global and local routes, where the control system automatically controls the ship according to the route planning, which reduces the energy loss resulting from human control.
Autonomous control technologies adopt sensor information fusion, which integrates the information collected by different sensors to compensate for each other's shortcomings, provide more accurate information, and detect ship obstacles that may have been missed by the crew. Therefore, the safety and reliability of ship navigation is improved. When USVs encounter storms, collisions, or other unsafe events, the absence of a crew removes the risk of crew safety or losses.
The uniquely designed structures of USVs' usually do not provide pirates with opportunities to board the ship. Host computers are installed within a closed space and cannot be accessed by pirates to take control of the USVs. In the event of an attempted attack, the host computer can also automatically control the ship to slow down until surveillance ships or intervention forces arrive. The absence of a crew again reduces the risk of harm because pirates cannot take any crew members hostage.
4.2 Problems caused by USV application
Although USVs use intelligent equipment, which improves the ship's intelligence level, its service efficiency, and its safety, problems may result from their operations.
For example, the relevant regulatory provisions and definitions for USVs are not suitable for existing international maritime conventions. Most international maritime conventions were established for crewed ships and cannot be applied to USVs and must be modified. Therefore, the largescale application of USVs involves the modification of complex maritime treaties, which will be described in detail in Section 4.3.
USVs no longer need large crews, which leads to the development of the professional abilities of crew members toward integration and higher technical requirements (Liang et al., 2018; Wang et al., 2021a).By the end of 2020, China had 1.716 million seafarers on duty. If USVs replace crewed ships, most of the crew will be laid off as a result. This enormous number of redundant crew will become a serious problem and provisions must be made to employ them elsewhere.
USVs automatically collect and process information, plan paths, and transmit the data back to shore-based monitoring stations. Whether this method is safe, how the shorebased personnel find the ship when the USV signal is lost, in addition to issues such as information interaction, anti-interference, real-time data transmission problems, and communication priority strategies, must be considered.
At the same time, there is discussion on whether USVs should comply with the Convention on the International Regulations for Preventing Collisions at Sea (COLREGS). In the USV collision avoidance system, some obstacle avoidance algorithms do not consider the COLREGS. If there are no standardized rules for USVs, however, they may disturb the order of maritime navigation and bring some difficulties to the regulation and oversight of sea ship navigation.
4.3 USV maritime supervision
Both USVs and traditional ships are controlled during navigation at sea. Most developed USVs are small and managed by the operating country to which they belong (Sun and Cai, 2020). Thus, each country can develop their own management system for USVs according to their level of USV technology research and the operating USV technologies. However, if USVs sail in other countries, conflicts may occur due to regulatory differences between countries. Most international maritime conventions and domestic legislation are based on crewed ships and some clauses are contrary to the characteristics of USVs or even lack provisions for certain USV-specific aspects.
Xu and Zhang (2017) analyzed the oversight problems brought by the application of USVs to maritime authorities and pointed out that the legal regulations for USVs are lagging behind the rate of USV technology development. In terms of legislation, Xu and Zhang (2017) suggest that the experience of unmanned cars and unmanned aerial vehicles (UAVs) can be referenced to revise or add new legal regulations for ship crews, collision avoidance, ship structures, and other international conventions. Cooperation between countries should simultaneously be strengthened and matching conventions should be formulated as early as possible, which is a necessary requirement for the effective regulation of USVs.
Zhang et al. (2020) analyzed the issue of whether USVs can be considered as ships and their links with the flag state by combining the United Nations Convention on the Law of the Sea (UNCLOS), Considering the Safety of Life at Sea Convention (SOLAS), and the Convention on Standards of Training, Certification and Watchkeeping for Seafarers. However, this paper analyzes whether legal regulations on ship construction, lifesaving equipment, navigation, crews, and training among others are applicable to USVs. The findings show that the current conventions are also applicable to USVs and corresponding adjustments to the existing convention framework can be made according to the characteristics of USVs.
SOLAS stipulates that "each flag State shall furnish a ship with qualified crew according to its own minimum manning requirements, " which is obviously contrary to USV features. In normal mode, a low-grade unmanned ship has no crew to work (Tasikas, 2004). Fully autonomous ships are completely controlled by their own intelligent computers. To some extent, the SOLAS Convention does not apply to USVs, and some clauses must be modified. However, Chapters Ⅱ-1 and Ⅱ-2 can be applied to USVs, where the monitoring, sensing alarms, and safety operating systems are located in the shore-based control center, which is referred to as the ships' cab. Chapter Ⅲ of the Convention should be changed to reduce the use of unnecessary USV lifesaving equipment and increase the availability of rescue equipment. In Articles 4, 9, 12, and 13 of Chapter V, the supply and technical modes of ship service must be transformed into automatic and intelligent modes. Considering the requirements for crew safety mentioned in Chapter V, the IMO considered a minimum crew level related to the ship's level of automation and the degree of shore-based assistance for the ship. Corresponding provisions should be made by USV development status associations and other organizations.
Most international shipping regulations currently only apply to ships with a gross tonnage of at least 500 tons (McLaughlin, 2004). Comite Maritime International issued a questionnaire on whether a USV is a ship, including an unmanned cargo ship with a gross tonnage of more than 500 tons, which constitutes a ship in domestic law. The analysis of the collected results shows that the UNCLOS and the domestic laws and regulations of most countries do not deny that USVs are classed as ships.
If USVs are not identified as ships, they are not bound by international shipping laws and regulations, and could then sail freely at sea, which will cause interference to ships sailing in a standard way and their operators may have difficulties related to IMO participation and international oversight (Fraser, 2011). In particular, when a USV sails in narrow waters, and if the existing regulations cannot be strictly observed, it is easy to disrupt the normal navigation order, which will pose a risk to the safety of other ships that sail in the same waters.
Most marine accidents are caused by human factors. In theory, adopting unmanned technology could reduce accidents by two-thirds. However, the number of traffic accidents involving unmanned cars make people doubt the maturity of unmanned technology. In addition, criminals may attempt to control an unmanned ship by hacking the ship's computer systems and using the ship to transport prohibited substances.
Hence, SOLAS and other conventions may be incompatible with USVs because of the following:
1) Different countries have achieved different levels of USV research and development; therefore, it is difficult to set uniform regulations.
2) The automation levels of ships sailing at sea differ.
3) USV technology is developing and is updated rapidly.
4) Many regulations and conventions must be modified, which may take a long time to accomplish.
USVs are currently not excluded from the definition of ships in SOLAS, COLREGS, and other international treaties. However, there are challenges for USVs based on the crew-related requirements (Li et al., 2019). There is no doubt that the transformation of crewed ships into USVs is a large transition with are significant differences in the features of the different ships. As a result, conventions established by referring to crewed ships must largely be revised.
5 Key USV technologies
5.1 Automatic collectionof environmental information
Ships sail in a complicated and changeable ocean environment; therefore, it is very important that their surrounding environmental information be obtained and identified, including not only the weather, other ships, large marine garbage, islands, underwater reefs, suspended marine garbage under the water surface and other obstacles, but also channel water levels, ship traffic volumes, and other information. Yin et al. (2020) proposed building a monitoring tower to establish a wired fiber backbone network for the whole waterway to obtain water levels and equipment status.
Information collection previously used a single sensor to obtain information about objects on the surface or underwater. Marine radar is the most common device used for navigation and obstacle avoidance of ships because it can obtain information over a large distance. Based on visual water surface target detection, Yang et al. (2015) designed a water surface target detection, recognition, and tracking system using deep learning and segmentation detection. However, the visual sensor's recognition performance is significantly reduced in bad weather, such as heavy rain.
Because each sensor has certain deficiencies, a variety of sensor information fusion technologies were proposed, which use the information from sensors in different external effective environments and optimizes it using information processing technologies to obtain a more accurate and reliable result (Xu, 2020; Yang, 2020). Bar-Shalom, Willett, and other foreign teams, such as Qin Yongyuan from North-western Polytechnical University and Deng Zili from Heilongjiang University in China, made significant contributions to information fusion technology and promoted the development of relevant technologies (Peng et al., 2013; Yang et al., 2015). Jiang and Mekonnen (2013) used a federated Kalman filter to complete the information fusion.
Tuan et al. (2018) analyzed the feasibility of accurate positioning in cities by using closely coupled integration of information from GPS/BDS/GLONASS RTK/INS, and proposed strategies of AR and Kalman waves, to solve unusual values in the measured information. However, with long power outages, it is difficult for GNSS to reach centimeterlevel accuracy and there is no acceptable solution for multipath errors.
Dai (2019) used clustering and Gauss-Kruger projection to find spatiotemporally identical data for AIS and radar. A fuzzy mathematics algorithm is used to find the required data for the target ship and a weighted fusion algorithm is used to assign weights for two kinds of data to achieve the purpose of data fusion. Zuo and Zhong (2017) solved the asynchronous multirate problem in fusion technology by using a multiscale system modeling method. M.J. García-Ligero et al. (2015) proposed a fusion algorithm of a distributed weighted robust Kalman filter, and a sequential fusion algorithm proposed by Lin and Sun (2016), which solved the problem of noise correlation that is easily ignored in information fusion (Lu et al., 2017).
Following the continuous research on information fusion technology, this technology has moved from theoretical research to practical application and has been applied to small USVs to collect information about their surroundings. The relevant multi-sensor technology is currently relatively mature.
5.2 Ship motion model and control
The motion control of a USV is a technical challenge because the marine environment is complex and ships are prone to be troubled by environmental factors such as waves, strong winds, and ocean currents when operating at sea. Wide swings, large angle rolls, and other situations lead to large yaw disturbances. In addition, unstable headings also present challenges. Large swings could lead to ships capsizing (Pu et al. 2020). Therefore, it is necessary to build a more comprehensive and accurate ship kinematics model to achieve ship motion prediction and compensation in advance.
A ship kinematics model is divided into linear global response and nonlinear separation models (Wang et al., 2021b). Do et al. (2004) established a six degrees of freedom (DOF) USV motion mathematical model for waves, swaying, and yawing motion, which ignores wave, wind, and ocean current effects. The 6-DOF model of ship motion is shown in Figure 3. In the sea, the roll, pitch, and heave are usually neglected. Nan et al. (2022) analyzed the vessel 3-DOF and its mathematical model can be expressed as follows:
$$ \left\{\begin{aligned} \dot{p} &=\boldsymbol{R}_{\psi}(\psi) v_{r}+V_{c} \\ \dot{\psi} &=r \end{aligned}\right. $$ 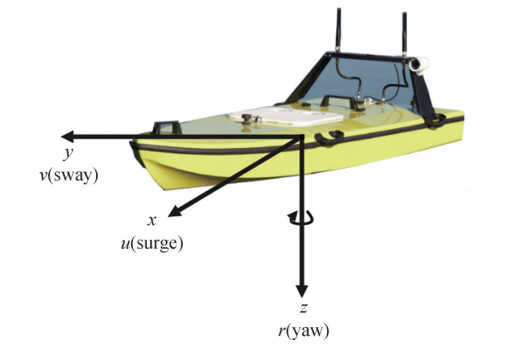 Figure 3 Definition of surge, sway and yaw modes of motion
Figure 3 Definition of surge, sway and yaw modes of motionThe Rφ is a rotation matrix, which is expressed as follows:
$$ \boldsymbol{R}_{\psi}(\psi)=\left[\begin{array}{lr} \cos \psi & -\sin \psi \\ \sin \psi & \cos \psi \end{array}\right] $$ Based on this model, the control objectives for autonomous mobile vehicle (AMV) paths moving on a two-dimensional plane were set and the guiding method to be followed for single and multiple AMVs were described. McCue (2016) and Fossen (2011) added environmental factors outside the ship into the 6-DOF motion and constructed a nonlinear motion model. Based on a 3-DOF vessel model, Nan et al. (2022) described two estimation methods for achieving high-performance motion control, that is, disturbance observers and extended state observers, and analyzed the applications of the above two estimation methods for trajectory tracking, path following, and formation control of fully actuated AMVs.
Li et al. (2022) designed a position control law and stabilized attitude errors using an attitude controller, which is based on the 3-DOF model of UAVs and the 6-DOF model of USVs. From these two methods, a robust adaptive neural cooperative control algorithm was proposed to realize the cooperative motion of UAVs and USVs.
Zhang et al. (2021) presented a robust adaptive neural control algorithm for wing-sail-assisted vehicles. By adopting multiport event-triggering, the computing load and the occupancy of the channel from the sensor to the controller was reduced. Two learning parameters were designed to compensate for uncertainty in the gain function. Compared with the existing algorithms, the control and adaptive laws were triggered when the state error event-triggered rule was satisfied. The algorithm is comparable with the traditional RBF-NNS. Although it can improve the simplicity and reduce the burden, it is not a simple task to compress information about weights into a norm-based parameter. Li et al.(2021) used a proportional integral sliding mode manifold to stabilize the state errors calculated according to the heading and yaw subsystems.
Considering the uncertainty resolving system and the influence caused by external disturbances, an event-triggered mechanism was designed in addition to a hyperbolic tangent function to make the input change smooth and satisfy the input saturation constraint. Based on these functions, an eventtriggered robust adaptive control law was designed. Through the established kinematic model, the ship's real-time roll, pitch, speed, and other information are obtained. Combined with the size and direction of wind, waves, and current, the ships restore torque, resistance, and their own characteristics are used to predict the ships' possible motion. Following calculations, motion compensation is performed in advance to ensure that USVs will not stall and buckle when sailing at sea.
A multi-degree-of-freedom mathematical model benefits more accurate path planning because it results in path planning that is closer to the actual situation. The control of unmanned ships is currently developing from controlling a single ship to controlling multiple ships. Peng et al. (2021) described the structure and method of motion coordination control for multiple autonomous surface vehicles (ASVs) and the latest progress of motion coordination control in the Tactical Air Command Center.
5.3 Independent planning of ship route
Route planning is a very important research topic in USVs. The curves or sequence points between the starting point and destination can be regarded as the path and path planning is the strategic method to formulate routes for navigation (Xie et al., 2020). Autonomous robot path planning is similar to route planning for USVs. However, due to the characteristics of the marine environment and the ship itself, the existing robot path algorithm must be improved to be applied to USVs (Zhou, 2020).
Considering local paths, Lee et al. (2004) improved the artificial potential field using fuzzy reasoning and realized obstacle avoidance path planning with COLREGS under typical ship meeting situations. Based on COLREGS, Cheon et al. (2018) realized an optimal path-planning method that used variable space search and a fuzzy reasoning algorithm. Wei et al. (2018) used sensing parameters to determine the direction of obstacle avoidance and designed a forward prediction method for USVs' local obstacle avoidance based on vector field histograms.
Wang et al. (2018b) established an action space containing eight discrete actions, established a nonlinear incentive function with the ship distance from the target point and the obstacle point as the threshold, and adopted strategy to assign selected probabilities for actions with different reward values. A path-planning algorithm based on Q-learning reinforcement learning was also proposed, which considers fewer ship discrete actions and has a slower convergence speed and more iterations.
Wu et al. (2012) aimed at the difficult design of state and action spaces in dynamic environments, and the traditional deep Q-network (DQN) algorithms, which exploit the situation of overestimating the Q value, and established a dueling Q-network autonomous navigation and obstacle avoidance (ANOA) algorithm based on the DQN algorithm. Using a constructed 6-DOF model of the ship, ANOA establishes state-value and action dominance functions to evaluate the Q value and reduce the DQN coupling. The ANOA algorithm was specifically used to deal with path planning in a dynamic environment. However, the influences of wind speed and direction on the planned path were not considered. Yang and Zhao (2018) reduced the degree of collision risk and loss function values by improving the simulated annealing algorithm.
In global path planning, Xue et al. (2018) used a particle swarm optimization algorithm to solve path nodes in the face of static obstacles. Based on the improvement of the genetic algorithm, Sun (2016) used the Bézier curve to optimize the path turning points and established a global path-planning algorithm. Meanwhile, a local path-planning algorithm based on velocity resolution was used for dynamic obstacle avoidance, but the interface between global and local path planning in the simulation process, as well as in some qualifications, such as vessel speed and acceleration, must be optimized further.
Hu et al. (2017) used a multi-objective optimization method based on risk discrimination to realize global and local ship path planning that conformed to COLREGS requirements.
Lin (2020) proposed the D* algorithm, which adopted the ship domain model by Fujii Ra to realize path planning in static and dynamic environments. Liu (2014) combined methods using a potential field and dynamic raster to create a potential field dynamic raster method with a simple structure that was easy to realize. The dynamic refinement of the raster accurately modeled environmental information using an improved potential field method with reduced path fold processing, reduced path nodes, and reduced computational complexity to achieve better global planning results. However, this paper does not consider the influence of hydrometeorological factors, such as wind and wave flow, on path planning when modeling.
Yan et al. (2021) established an USVs ANOA (UANOA) algorithm with 13 discrete actions. The UANOA algorithm established reward functions in terms of collision occurrence, relative position to the target point, and roaming. Based on a double DQN, the algorithm incorporated a gated recurrent unit network to increase the memory capacity of previously perceived information. This algorithm achieved path planning for dynamic and static obstacles, but only considered the rudder angle and did not consider propulsion changes.
There is more dependence on the known environmental information in global path planning, which cannot start in time when facing dynamic obstacles. Most local path-planning methods consider DCPA, TCPA, or data collected by sensors, such as laser radar, to determine whether USVs must avoid obstacles. However, using local path planning alone will easily lead to ships being unable to restore their routes; therefore, path-planning algorithms generally adopt a combination of global and local paths.
Ship path-planning algorithms favor machine learning, reinforcement learning, and deep reinforcement learning, among other algorithms, which have a higher accuracy than the traditional algorithms because they can learn by themselves and search for an accurate path faster when facing a real situation. Most learning algorithms applied in the field of ship path planning currently set the ships' speed to a fixed value and do not consider the influence of wind, waves, and currents on the path planning. Therefore, path-planning algorithms cannot be applied to actual navigation. In addition, the paths created by many algorithms are not rounded enough and lack a certain continuity, which is not in line with vessel motion trajectories. Future research will focus on these points in vessel path planning.
5.4 Navigation stability
The stability of USVs sailing at sea includes aspects, such as signal strength, power units, and equipment self-tests. USVs adopt unmanned design concepts; therefore, the security of signal transmission is an important problem. USVs use specific signals to transmit all data to prevent being intercepted by pirates while navigating. Accessible signal information would enable interceptions of USVs by calculating the relevant information and sending error guidance information to USVs.
Unmanned USVs are not crewed; therefore, a highly stable propulsion system is essential for USVs to keep sailing in contrast to land traffic where continuity of security can be provided. In the marine environment, the nature of ocean transportation is such that when a ship's power plant fails at sea, it will be difficult to provide maintenance in a reasonable time. Therefore, it is important to inspect USVs before beginning the navigation to ensure the stability of the equipment during navigation.
6 USV internal design outlook
Although USVs' intelligent systems are updated constantly, the protection of cargo has not changed much. USVs' cargo holds are not under constant surveillance and if one section of the cargo hold has leaked, caught fire, or suffered some other type of damage, it is likely that other cargo sections and the vessel's navigation will also be affected. In addition, bad weather at sea may tilt ships and their cargo may be affected by accidents.
Large USVs are generally used for international cargo transport; hence, their routes are characterized by long distances and long voyage times, and the cargo should not move or be handled during the voyage. Based on these characteristics, a raster design is generally used for the hold of a large cargo ship, such as an inner hull grid structure. For different types of cargo carriers, different clapboards are used for each compartment, such as fire and anticorrosion barriers. Hence, if the cargo in one compartment spontaneously combusts or suffers leakage, it will not interfere with the other cargo because they are in separate compartments. If a fire occurs, a closed cargo hold helps to extinguish the fire.
Enclosed compartments can protect the cargo from corrosion by the elements, such as high salinity in the sea air. Fixtures can also be provided in the cargo holds, which can automatically activate to secure the cargo when the cargo hold is closed to prevent the goods from colliding within the cargo hold when the ship sails in strong winds, high waves, or other bad environmental effects that may lead to the hull shaking violently. Figures 4 and 5 show longitudinal and traverse hull sections, respectively.
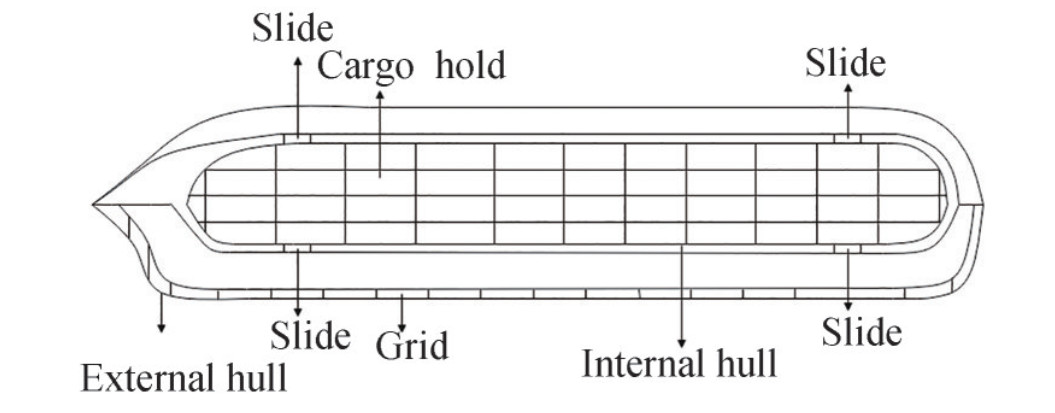 Figure 4 Ideal USV longitudinal section
Figure 4 Ideal USV longitudinal section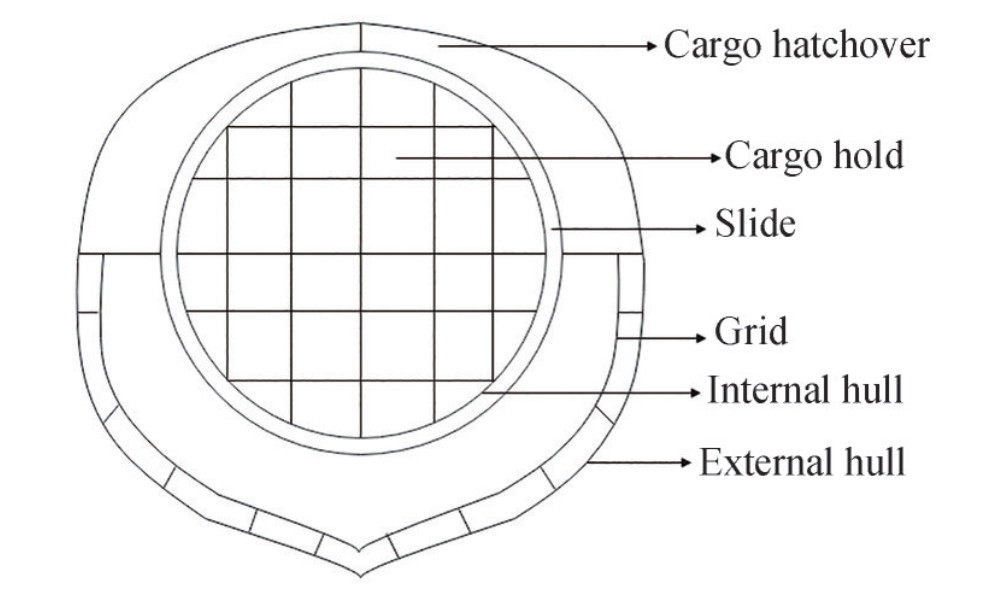 Figure 5 Ideal USV cross section
Figure 5 Ideal USV cross sectionThe hull of USVs can be designed as an internal and external double hull structure, where the outer hull can be a lattice so that when a hull collision does occur, only the damaged part of the grid is flooded, which will enable USVs to still have enough buoyancy to keep sailing.
A further design concept is the adoption of a slide contact between the interior and exterior of the ship's hull. Considering the internal hull, enough weight is put on the lower part so that the center of gravity of the inner hull is closer to the lower part, thereby increasing the stability of the hull. The hull tilts when it is disturbed by strong winds, high waves, and other environmental effects; therefore, the location of the internal hull's center of gravity designed to not be in its center, which produces a restoring torque. This is achieved by relying on the slide and the characteristic of its low center of gravity to restore the inner hull to its original state within the outer hull. In Figure 6, the ship tilts 20 degrees to the right while the center of gravity of the internal hull is on the left side of the internal hull rather than in a vertical direction. Gravity generates a torque, which makes the internal hull rotate back to its original position using the slide. Figure 7 shows the final state. The closed hull design simultaneously makes the hull form a closed space, which will not be invaded by sea water, even if the ship capsizes.
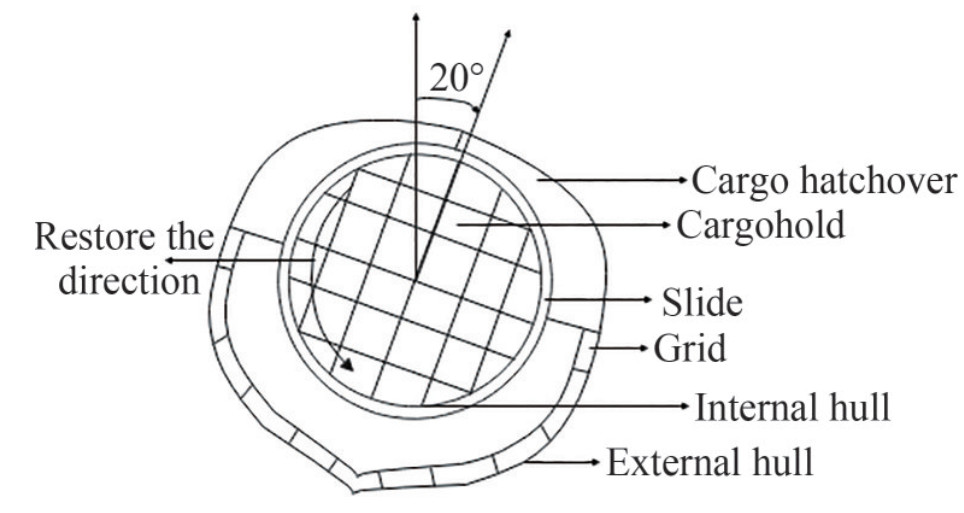 Figure 6 USV under rolling condition
Figure 6 USV under rolling condition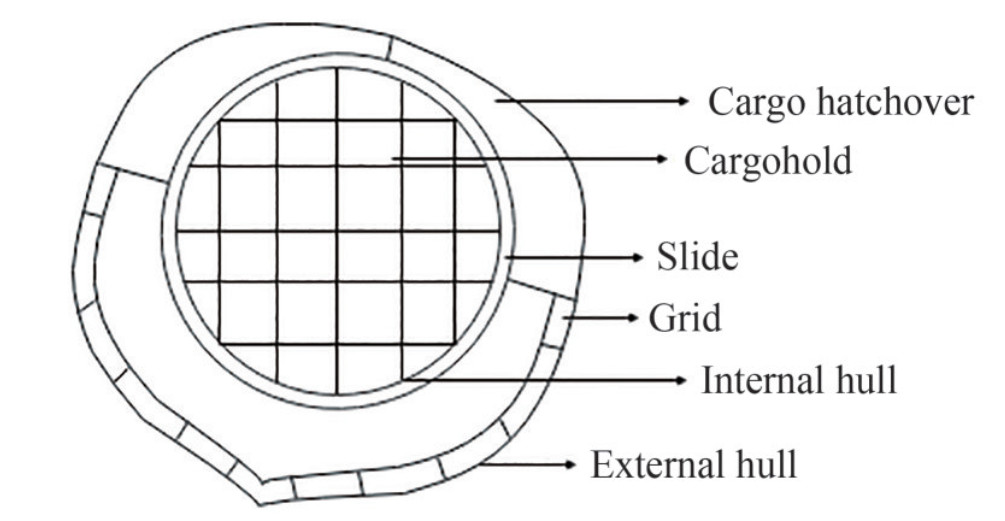 Figure 7 Ideal USV under rolling condition
Figure 7 Ideal USV under rolling condition7 Conclusions
Intelligent systems are products of technology development. The marine industry among others is inevitably developing in this direction because intelligent systems refer to the thinking process of the human brain and have the ability to think by themselves and complete tasks without relying on human involvement.
The technology of small USVs is relatively mature and unmanned ships are developing toward large transport vessels. This paper describes the types of USVs that have been developed and their applications. The advantages of USVs, the incompatibility of the characteristics of USVs with the existing legal regulations, the large-scale unemployment of sailors, and other problems were analyzed. In addition, four key technologies in the current USV research field were also analyzed.
Most current research on intelligent vessels is focused on systems, but few studies explore the security of cargo on USVs. Therefore, this paper proposes an inner hull grid structure, where the grid design enables cargo to be stored independently so that, even if one cargo section catches fire, leaks, or is otherwise damaged, it will not affect the cargo in other sections or the USVs' navigation. Moreover, this hull structure can generate a recovery torque by using the different characteristics between the left and right ends when the ship is tilted and using a slide and recovery torque to restore the inner hull to its original position. To some extent, this ensures the stability of the cargo transported during the ship's navigation.
However, this proposed design is still at a theoretical stage and has not yet been tested in the real world. The proposed hull design should consider the inclusion of rescue rooms and other spatial demands, which may affect the amount of cargo that can be loaded and the installation of facilities and equipment. In the future, these aspects will be studied in greater depth to complete the transformation of the design from theoretical to practical stages.
-
Figure 1 USV model
Figure 2 Esm30 USV
Figure 3 Definition of surge, sway and yaw modes of motion
Figure 4 Ideal USV longitudinal section
Figure 5 Ideal USV cross section
Figure 6 USV under rolling condition
Figure 7 Ideal USV under rolling condition
Table 1 A timeline table of application and model of foreign USV
Time Creator Country or institution Application or model of USV 1898 Nikola
TeslaUSA - 1961 - Japan Jin Hua Shan Wan 20th century - USA Maritime target searching and relevant data support for water quality detection Early 21st century - Israel Protector USV 2016 - Finland Rawls AAWA project used on Stella
USV2016 - USA Sea Hawk 2018 - Canada SB Met - - University of Rostock Measurement dolphin - - Italian institute of intelligent automation systems Charlie USV - - University of Plymouth Springer USV Table 2 A timeline table of application and model of domestic USV
Time Creator Country or institution Application or model of USV 1985 - Hudong Shipyard Berlin Express - - Yunzhou The first USV for environmental measurement and the first stealth USV - - Shenyang Xinguang Company Tianxiang I 2009-2018 - The First Institute of Oceanography Jiu Hang 2021 Zhao Tongsheng - Water quality sampling 2021 Ning Xinlong - Measurement of underwater terrain -
Arai T, Pagello E, Parker, LE (2002) Advances in Multirobot Systems. IEEE Transactions on Robotics & Automation 18(5): 655–661. https://doi.org/10.1109/TRA.2002.806024 Bibuli M, Bruzzone G, Caccia M, Indiveri G, Zizzari AA (2008) Line following guidance control: Application to the Charlie unmanned surface vehicle. IEEE/RSJ International Conference on Intelligent Robots & Systems Bureau Veritas (2017) Guidelines for Autonomous Shipping. Paris: Bureau Veritas Campbell S, Naeem W, Irwin GW (2012) A review on improving the autonomy of unmanned surface vehicles through intelligent collision avoidance manoeuvres. Annual Reviews in Control 36(2). https://doi.org/10.1016/j.arcontrol.2012.09.008 Cao Juan, Wang Xuesong (2018) Development status and future prospects of USV at home and abroad. China Ship Survey (5): 4. https://doi.org/CNKI:SUN:ZGCJ.0.2018-05-026. Chen Yingbin (2019) Overview of USV development status and key technologies. Scientific and Technological Innovation (2): 2. https://doi.org/CNKI:SUN:HLKX.0.2019-02-036. Cheon YH, Lee SG, Kim M, Kim HO, Lee SI (2018) The Association of Disease Activity, Pro-Inflammatory Cytokines, and Neurotrophic Factors with Depression in Patients with Rheumatoid Arthritis. Brain Behavior and Immunity, 73. https://doi.org/10.1016/j.bbi.2018.05.012 Dai Guangshu (2019) Data fusion application technology in marine unmanned driver technology. Ship Science and Technology 41(14): 55–57. https://doi.org/10.3404/j.issn.1672-7649.2019.7A.019 Danish Maritime Authority (2017) Analysis of regulatory barriers to the use of autonomous ships. Korsor: Danish Maritime Authority Do KD, Jiang ZP, Pan J (2004) Robust adaptive path following of underactuated ships. Automatica 40(6): 929–944. https://doi.org/10.1016/j.automatica.2004.01.021 Farinelli Alessandro, Iocchi Luca, Nardi Daniele (2004) Multirobot systems: a classification focused on coordination. IEEE transactions on systems, man, and cybernetics. Part B, Cybernetics: a publication of the IEEE Systems, Man, and Cybernetics Society 34(5): 2015–2028. https://doi.org/10.1109/TSMCB.2004.832155 Fossen TI (2011) Handbook of Marine Craft Hydrodynamics and Motion Control. https://doi.org/10.1002/9781119994138.ch4 Fraser KC (2011) Ship: 5000 Years of Maritime Adventure. Reference Reviews 25(3) Fu Jun (2015) Analysis of ship unmanned system. Information Technology and Informatization (04): 140–141. https://doi.org/10.3969/j.issn.1672-9528.2015.4.61 García-Ligero MJ, Hermoso-Carazo A, Linares-Pérez J (2015) Distributed fusion estimation in networked systems with uncertain observations and Markovian random delays. Signal Processing 106: 114–122. https://doi.org/10.1016/j.sigpro.2014.07.003 Gong Ruiliang, Ji Yuguan (2016) Intelligent ship technology and unmanned navigation technology[J]. Ship & Boat 27(05): 82–87. https://doi.org/10.19423/j.cnki.31-1561/u.2016.05.082 Hu L, Naeem W, Rajabally E, Watson G, Mills T, Bhuiyan Z, Salter I (2017) COLREGs-Compliant Path Planning for Autonomous Surface Vehicles: A Multiobjective Optimization Approach. IFAC PapersOnLine 50(1): 13662–13667. https://doi.org/10.1016/j.ifacol.2017.08.2525 Jiang D, Mekonnen TM (2013) INS/GPS/MNS Integrated Navigation System with Federated Kalman Filtering. Advanced Materials Research. https://doi.org/10.4028/www.scientific.net/AMR.718-720.1207 Krzysztof W, Jakub M, Pentti K (2018) Towards the development of a system theoretic model for safety assessment of autonomous merchant vessels. Reliability Engineering? System Safety 178(Oct. ): 209–224. https://doi.org/10.1016/j.ress.2018.05.019 Lee SM, Kwon KY, Joh J (2004) A fuzzy logic for autonomous navigation of marine vehicle satisfying COLR- EG guidelines. International Journal of Control Automation & Systems 2(2): 171–181. https://doi.org/10.1007/s00170-003-1782-z Liang Mincang, Liu Hu, AI Wanzheng, Dong Hongcang (2018) Development countermeasures of high-quality crew under the background of ship intelligence. Shipping Management 40(12): 26–30. https://doi.org/10.13340/j.jsm.2018.12.010 Li Jiqiang, Zhang Guoqing, Li Bo (2022) Robust Adaptive Neural Cooperative Control for the USV-UAV Based on the LVS-LVA Guidance Principle. Journal of Marine Science and Engineering. https://doi.org/10.3390/jmse10010051 Li Jiqiang, Zhang Guoqing, Zhang Xianku, Zhang Weidong (2021) Event-triggered robust adaptive control for path following of the URS in presence of the marine practice. OCEAN ENGINEERING. https://doi.org/10.1016/j.ocean-eng.2021.110139 Li Rui, Li Jiaxin, Zeng Yan (2019) On the legal status of unmanned ships. China Oceans Law Review (04): 149–190 Lin H, Sun S (2016) Optimal estimator for a class of non-uniform sampling systems with missing measurements. 2016 35th Chinese Control Conference (CCC). https://doi.org/10.1109/ChiCC.2016.7553675 Lin Xu (2020) Dynamic Path Planning for Collision Avoidance of USV based on D* Algorithm. International Core Journal of Engineering, 6(5): 73–83. https://doi.org/10.6919/ICJE.202005_6(5).0013 Liu Chunyang (2021) Research on ship navigation automation and navigation intelligence. Marine Equipment Materials & Marketing 29(5): 65–66. https://doi.org/10.19727/j.cnki.cbwzysc.2021.05.025 Liu Jian (2014) Research on path planning technology of unmanned surface vehicles. Jiangsu University of Science and Technology. Liu Zuopung (2021) The application of intelligent technology and unmanned driving technology in ship design. Ship Science and Technology 43(4): 7–9 Lu J, Yan L, Xia Y, Qiao G, Fu M, Lu K (2017) Asynchronous multirate multisensor data fusion over unreliable measurements with correlated noise. IEEE Transactions on Aerospace & Electronic Systems 53(99): 2427–2437. https://doi.org/10.1109/taes.2017.2697598 Lv Guanghao, Peng Zhouhua, Wang Haoliang, Liu Lu, Wang Dan, Li Tieshan (2021) Extended-state-observer-based distributed model predictive formation control of under-actuated unmanned surface vehicles with collision avoidance. Ocean Engineering 238. https://doi.org/10.1016/j.oceaneng.2021.109587 Masrwg (2017) Maritime autonomous surface ships UK code of practice. Southampton: MASRWG Mccue L (2016) Handbook of marine craft hydrodynamics and motion control. IEEE Control Systems 36(1): 78–79. https://doi.org/10.1109/MCS.2015.2495095 Mclaughlin R (2004) Unmanned naval vehicles at sea: USVs, UUVs, and the adequacy of the law. Journal of Law Information & Science 21(2). https://doi.org/10.5778/JLIS.2011.21.McLaughlin.1 Nan Gu, Dan Wang, Zhouhua Peng, Jun Wang, Qing-Long Han (2022) Disturbance observers and extended state observers for marine vehicles: A survey. Control Engineering Practice 123: 0967–0661. https://doi.org/10.1109/TSMC.2022.3162862 Ning Xinlong (2021) Brief analysis on the application prospect of unmanned survey ship in underwater topographic survey. Water Conservancy Construction and Management 41(3): 4. https://doi.org/10.16616/j.cnki.11-4446/TV.2021.03.12 Peng Z, Qi W, Deng Z (2013) Centralized Fusion Steady-State Robust Kalman Filter for Uncertain Multisensor Systems. Lecture Notes in Electrical Engineering 255: 219–226. https://doi.org/10.1007/978-3-642-38460-8_25 Peng Z, Wang J, Wang D, Han QL (2021) An Overview of Recent Advances in Coordinated Control of Multiple Autonomous Surface Vehicles. IEEE Transactions on Industrial Informatics 17(02): 732–745. https://doi.org/10.1109/TII.2020.3004343 Pu Jinjing, Liu Han, Jiang Yunhua, Huang Jian, Kuang Guangshen, Bruce Lee (2020) Summary of the Status and Development Trends of Unmanned Surface Vehicle. Marine Information 35(1): 6–11. https://doi.org/CNKI:SUN:HTXX.0.2020-01-002. Rødsethø J, Nordahl H (2017) Definitions for autonomous merchant ships. Trondheim: Norwegian Forum for Autonomous Ships. https://doi.org/10.13140/RG.2.2.22209.17760 Sun Xiaojie (2016) Research on Real-time Path Planning System for Unmanned Surface Vessel. Dalian Maritime University Sun Xiaojie, Wang Guofeng, Fan Yunsheng (2021) Collision avoidance guidance and control scheme for vector propulsion unmanned surface vehicle with disturbance. Applied Ocean Research 115. https://doi.org/10.1016/j.apor.2021.102799 Sun Xu, Cai Yuliang (2020) Ship technology: from automation to autonomy. China Ship Survey (5): 46–48. https://doi.org/CNKI:SUN:ZGCJ.0.2020-05-016. Su Shibin, Liu Yingce, Lin Hongshan, Wu Ronghui, Zhou Xiaoying (2018) Development and Key Technologies of Unmanned Transport Ship. Ship & Ocean Engineering 47(05): 56–59. https://doi.org/10.3963/j.issn.1671-7953.2018.05.013 Tasikas V (2004) Unmanned aerial vehicles and the doctrine of hot pursuit: A new era of coast guard maritime law enforcement operations. Tulane Maritime Law Journal (29): 59–80 Tuan L, Hongping Z, Zhouzheng G, Qijin C, Xiaoji N (2018) High-Accuracy Positioning in Urban Environments Using Single-Frequency Multi-GNSS RTK/MEMS-IMU Integration. Remote Sensing 10(2): 205. https://doi.org/10.3390/rs10020205 United States Navy (2007) The Navy Unmanned Surface Vehicle (USV) Master Plan Vasudevan Shriram K, Baskaran Balraj (2021) An improved realtime water quality monitoring embedded system with IoT on unmanned surface vehicle. Ecological Informatics 65. https://doi.org/10.1016/j.ecoinf.2021.101421. Wang Chengbo, Zhang Xinyu, Li Junjie (2018a) Development ideas of unmanned ship navigation technology based on e-navigation. Journal of Jimei University (Natural Science) 23(5): 354–359. https://doi.org/10.19715/j.jmuzr.2018.05.006 Wang Chengbo, Zhang Xinyu, Zou Zhiqiang, Wang Shaobo (2018b) On path planning of unmanned ship based on Q-learning. Ship & Ocean Engineering 47(5): 168–171. https://doi.org/10.3963/j.issn.1671-7953.2018.05.038 Wang Yunhui, Chen Yuao, Liang Mincang (2021a) Research on the impact of the development of USV on Seafarers' career and its countermeasures. Shipping Management 43(8): 41–44. https://doi.org/10.3340/j.jsm.2021.08.015 Wang Yuanyuan, Liu Jialun, Ma Feng, Wang Xingping, Yan Xinping (2021b) Review and prospect of remote control intelligent ships. Chinese Journal of Ship Research 16(1): 18–31. https://doi.org/10.19693/j.issn.16733185.01939 Wei Xinyong, Huang Yesheng, Hong Xiaobin (2018) Local obstacle avoidance method for unmanned surface vehicle based on VFH* algorithm. China Measurement & Test 44(12): 39–45. https://doi.org/10.11857/j.issn.1674-5124.2018.12.007 Wrobel K, Montewka J, Kujala P (2018) System-theoretic approach to safety of remotely-controlled merchant vessel. Ocean Engineering 152: 334–345. https://doi.org/10.1016/j.oceaneng.2018.01.020 Wu X, Chen HL, Chen CG, Zhong MY, Xie SR, Guo YK, Fujita H (2012) The autonomous navigation and obstacle avoidance for USVs with ANOA deep reinforcement learning method. Knowledge-Based Systems 196. https://doi.org/10.1016/j.knosys.2019.105201 Wu Zhaolin (2017) Ship automatic navigation and navigation intelligence. China Maritime Safety (08): 16–19. https://doi.org/10.16831/j.cnki.issn1673-2278.2017.08.007 Xie Boyu, Li Maoqing, Yue Lili (2020) Research on Route Real-Time Planning of UAV-Intelligent Platoons Cooperative Systems. Computer Engineering and Applications 56(20): 8. https://doi.org/10.3778/j.issn.1002-8331.2002-0038 Xu Chunsong, Zhang Renping (2017) Thoughts on the development of unmanned ships and the revision of maritime conventions. World shipping 40(03): 20–22. https://doi.org/10.16176/j.cnki.21-1284.2017.03.004 Xu Daguang (2020) Research on Object Detection Technology of USV based on Information Fusion Technology. Jimei University, (5): 4–51. https://doi.org/10.27720/dxnki.gjmdx.2020.000252 Xue Min, Xu Haicheng, Wang Shuo (2018) Path planning of unmanned craft based on particle swarm optimization algorithm. China Science and Technology Information (24): 69–70. https://doi.org/10.3969/j.issn.1001-8972.2018.24.025 Xu Xiaofeng, Xiao Yingjie, Zhang Xuelai (2021) A Review on Optimization of Unmanned Ship Path Based on Collision Avoidance Rules. Journal of Transport Information and Safety 39(02): 1–8. https://doi.org/10.3963/j.jssn.1674-4861.2021.02.001 Yan N, Huang S, Kong C (2021) Reinforcement Learning-Based Autonomous Navigation and Obstacle Avoidance for USVs under Partially Observable Conditions. Hindawi. https://doi.org/10.1155/2021/5519033 Yang Baicheng, Zhao Zhilei (2018) Multi-ship encounter collision avoidance decisions based on improved simulated annealing algorithm. Journal of Dalian Maritime University 44(02): 22–26. https://doi.org/10.16411/j.cnki.issn1006-7736.2018.02.004 Yang Bo (2015) Intelligent ship operation and maintenance technology. Maritime China (12): 68–69. https://doi.org/10.3969/j.issn.1673-6664.2015.12.022 Yang C, Yang Z, Deng Z (2015) Guaranteed cost robust weighted measurement fusion steady-state Kalman predictors with uncertain noise variances. Aerospace Science and Technology 46(Oct. –Nov. ): 459–470. https://doi.org/10.1016/j.ast.2015.08.014 Yang J, Xiao Y, Fang Z, Zhang N, Wang L, Li T (2015) An object detection and tracking system for unmanned surface vehicles. Society of Photo-Optical Instrumentation Engineers (SPIE) Conference Series. Society of Photo-Optical Instrumentation Engineers (SPIE) Conference Series Yang Yi (2020) Information fusion of an unmanned surface vehicle integrated navigation system. Dalian Maritime University https://doi.org/10.26989/dxnki.gdlhu.2020.00038 Ye Qiang (2017) Research on intelligent ship technology and unmanned technology. Shandong Industrial Technology (15): 106. https://doi.org/10.16640/j.cnki.37-1222/t2017.15.098 Yin Qun, Liu Tian, Mao Wenqiang (2020) Some thoughts on Key Technologies of intelligent ship. Marine Equipment/Materials & Marketing (10): 5–6. https://doi.org/10.19727/j.cnki.cbwzysc.2020.10.003 Yuan Kui, Li Yuan, Fang Lixin (2007) Recent researches and development on multirobot system. Journal of Automation, 33(8): 785–794 Zhang Guoqing, Li Jiqiang, Jin Xu, Liu Cheng (2021) Robust adaptive neural control for wing-sail-assisted vehicle via the multiport event-triggered approach. IEEE Transactions on Cybernetics, 2168–2267. https://doi.org/10.1109/TCYB.2021.3091580 Zhang Weipeng, Zhang Zhimin (2020) Research on the legal applicability of the requirement of maritime safety governance and navigation guarantee service on unmanned ships and associated countermeasures. China Maritime Safety (9): 31–34. https://doi.org/10.16831/j.cnki.issn1673-2278.2020.09.012 Zhao Tongqiang, Han Chao, Xu Yuliang (2021) Application of unmanned surface vehicle in urban river water quality monitoring. China Water & Wastewater 37(7): 7. https://doi.org/10.19853/j.zgjsps.1000-4602.2021.07.010 Zhou X, Cheng L, Li W, Zhang C, Li M (2020) A comprehensive path planning framework for patrolling marine environment. Applied Ocean Research 100:1021 55. https://doi.org/10.1016/j.apor.2020102155 Zhou Xiangyu, Wu Zhaolin, Wang Fengwu, Liu Zhengjiang (2019) Definition of autonomous ship and its autonomous level. Journal of Traffic and Transportation Engineering 19(06): 149–162. https://doi.org/CNKI:SUN:JYGC.0.2019-06-016. Zuo J, Zhong X (2017) Particle filter for nonlinear systems with multisensor asynchronous random delays. Journal of Systems Engineering and Electronics. https://doi.org/10.21629/JSEE.2017.06.04
