
Research on Stealth Assistant Decision System of Submarine Voyage Stage
https://doi.org/10.1007/s11804-020-00143-5
-
Abstract
Stealth security has always been considered as an important guarantee for the vitality and combat effectiveness of submarines. In accordance with the stealth requirements of submarines performing stealth voyage tasks, this paper proposes a stealth assistant decision system. Firstly, the submarine stealth posture is acquired. A fuzzy neural network inference engine based on improved simplified particle swarm optimization is designed. The auxiliary decision-making scheme for state control and maneuver avoidance of submarine and its equipment is automatically generated. Secondly, the simulation and deduction of the assistant decision-making scheme are realized by the calculation modules of sound source level, propagation loss, and stealth situation. The assistant decision-making scheme and simulation result provide decision support for the commander. Thirdly, the simulation experiment platform of the submarine stealth assistant decision system is constructed. The submarine stealth assistant decision system described in this paper can quickly and efficiently produce assistant decision-making schemes, including submarine and equipment control and maneuver avoidance. The scheme is in line with the combat experience and the results of the pre-model simulation experiments, whereas the simulation deduction evaluates the rationality and effectiveness of the selected scheme. The submarine stealth assistant decision system can adapt to a complex battlefield environment in addition to rapidly and accurately providing assistance in decision-making.Article Highlights• Based on the improved simplified particle swarm optimization algorithm, the learning of a fuzzy neural network is realized, the optimization ability of particle swarm optimization is enhanced, and the convergence speed and training efficiency are effectively improved.• Based on the fuzzy neural network, the inference engine of the stealth assistant decision-making scheme is established, which can adapt to the generation of multi input and multi output nonlinear stealth assistant decision-making scheme.• The stealth assistant decision-making system including the stealth assistant decision-making module and simulation module is constructed. -
1 Introduction
Stealth security has always been considered as an important guarantee for the vitality and combat effectiveness of submarines (Wang 2010). In accordance with the means of detection, stealth of submarines can be divided into different types, such as acoustic stealth, infrared stealth, and radar stealth. Acoustic stealth is particularly critical for the operational use of submarines and an important prerequisite for the existence of the frontier and the safe implementation of their mission. This stealth type can be qualitatively described as the capability of submarines to effectively avoid passive enemy acoustic detection and perform missions safely in a specific maritime battlefield environment (Qiang et al. 2014.). With the rapid development of underwater acoustic detection technology, the acoustic stealth of submarines is greatly threatened. In actual combat applications, the stealth of submarine mainly depends on its detectability. Detectability is usually described by the safety radius of a given threat or the detection probability of different distances (Tang 2007). In the sea battlefield environment, submarine dynamic stealth measures, such as noise-source equipment control and tactical avoidance, must be implemented to effectively evade the acoustic detection by the enemy. These stealth measures are based on the operating conditions of the submarine, the assessment results of the integrated acoustic stealth situation of the submarine, and the information of the enemy detection platform. In the future, the sea battlefield environment will change rapidly. Submarine stealth decision-making requirement is impossible to meet by making decisions manually. A computer-aided decision-making system can effectively handle battlefield information and other relevant information and provide submarine stealth decision support recommendations to commanders. In particular, decision support systems that incorporate artificial intelligence technology can take advantage of the experience of commanders and military experts and then make recommendations for decision-making. Submarine commanders can directly or slightly modify these suggestions for operational guidance, to improve the stealth assistant decision-making capability of submarines (Shi et al. 2015). As a typical intelligent decision-making control technology, the fuzzy neural network (FNN) combines the fuzzy system and neural network, integrates parallel computation, distributed information storage, strong fault tolerance, and adaptive learning capabilities of the neural network, and expresses vague or qualitative knowledge of the fuzzy system. FNN has been widely used in MIMO nonlinear decision and control systems (Vostakolaee and Amirshahi 2016). The current study aims to reduce the detectability of submarines using ocean background noise (Eugene 2007), maneuver avoidance (Jian et al. 2011), noise control (Ovalle and García-Pelaez 2016; He et al. 2015; Pan et al. 2008.), and noise monitoring (Kui and Cheng 2010). The current research on submarine stealth assistant decision-making mainly focuses on the study of the acoustic characteristics of the marine environment (Sun et al. 2015) and providing the commander with stealth status; however, with regard to stealth assistant decision system, the research on scheme generation and simulation deduction is lacking. This article aims at the process of stealthy voyage missions for submarines. The passive sonar detection platform information of the enemy is known, and a submarine stealth assistant decision system, which includes automatic scheme generation and scheme simulation, is established. An improved neural network based on particle swarm optimization (PSO) algorithm is used for the FNN inference engine and maneuver avoidance algorithm to automatically generate schemes and implement scheme simulation by submarine acoustic stealth situation assessment model, thus improving the efficiency of decision-making and ensuring the rationality and effectiveness of the scheme. Finally, the dynamic acoustic stealth performance of the submarine can be improved.
2 Submarine Stealth Assistant Decision System
The submarine stealth assistant decision system described herein mainly includes the following parts:
1) Inference engine for submarine and equipment control scheme based on FNN: Based on the combat experience in the knowledge base and submarine acoustic radiation, transmission loss, and stealth situation assessment simulation test data, the FNN parameters are trained and deployed, and a FNN inference engine is obtained. During the operation, information, such as the current operating status of the submarine and its equipment, the stealth situation assessment results of the submarine, and the state of the passive sonar detection platform of the enemy, is used as inputs, and the control scheme for the submarine and its equipment is obtained.
2) Submarine maneuver avoidance module: In accordance with the relative position of the submarine and the passive sonar detection platform, a maneuver avoidance algorithm is used to determine the aiming heading and location for the submarine to avoid the platform.
3) Simulation deduction module: Based on the status of the submarine and equipment, relative position of the submarine, and passive sonar in the assistant decision-making scheme, simulation is performed through calculation models, such as source level, transmission loss, and detection probability. Information about the submarine stealth situation is obtained after the implementation of the candidate schemes.
The running flow of the submarine stealth assistant decision system is as follows:
The submarine stealth assistant decision system receives submarine stealth situation assessment results. Based on the current operating status of the submarine and equipment, submarine stealth situation assessment results, and status information of enemy passive sonar detection platforms, the FNN is trained through combat experience and submarine acoustic radiation, transmission loss, and stealth situation assessment simulation test data and the submarine maneuver avoidance algorithm to achieve the automatic generation of submarine stealth assistant decision-making schemes. In accordance with the schemes achieved and based on the model of stealth situation assessment, the submarine source level, transmission loss, and stealth situation are calculated under a specific frequency band, and the contrast with the current stealth situation is obtained, thus achieving simulation deduction of submarine stealth assistant decision schemes. If the mission requirements are met, the commander modifies, confirms, and executes the selected scheme; otherwise, the scheme will be revised. The system stores the successful case in the FNN training set and uses the improved simplified PSO algorithm to learn the case (Yang et al. 2016; Liao 2000). Figure 1 shows the submarine stealth decision-making system process.
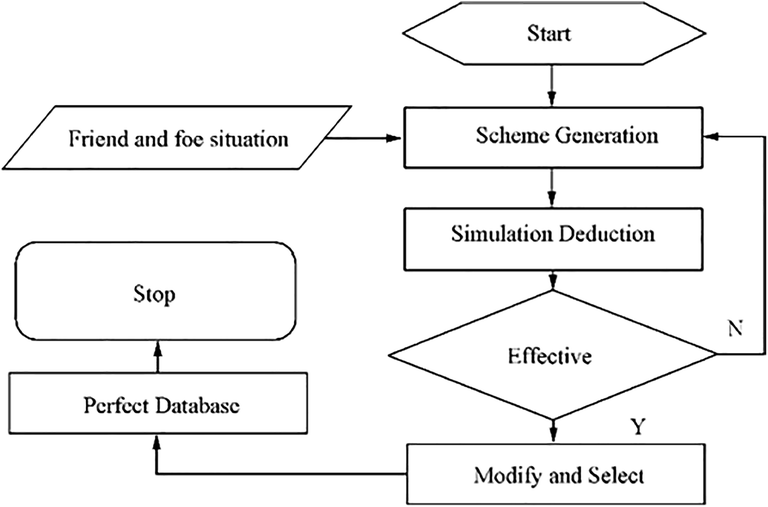 Figure 1 Submarine stealth assistant decision system flow
Figure 1 Submarine stealth assistant decision system flow3 Inference Engine Based on FNN
The submarine stealth assistant decision-making system needs to be generated in a complicated variable sea battlefield environment and should be based on multiple decision elements, including submarine stealth situation assessment results, exploration platform status and submarine status, automatic generation control scheme of submarine noise-source equipment, and submarine motion status. The system is a typical MIMO fuzzy system, and the noise-source equipment and the submarine motion status have nonlinear effects on the submarine source level and transmission loss at different frequency bands. Therefore, in this section, the submarine and its equipment control scheme library for stealth assistant decision-making is obtained through expert experience and model tests by integrated submarine acoustic radiation, acoustic transmission loss, and stealth situation assessment. The FNN inference engine improved by the simplified PSO algorithm is applied to the automatic generation of the scheme. The FNN inference engine is trained offline to realize the expression of the scheme and adaptive learning. The submarine and its equipment control scheme inference engine based on FNN improved by a simplified PSO algorithm have been constructed.
3.1 T-S FNN
The submarine and equipment state control scheme is obtained using the inference engine based on T-S FNN. T-S FNN is simplified into a multi-layer feed-forward neural network (Li 2012; Li et al. 2017), which is a MIMO system with n inputs, r outputs, and five layers.
First layer (input layer): Input status:
$$ X={\left({x}_1,{x}_2,\dots, {x}_n\right)}^{\mathrm{T}} $$ (1) Second layer (fuzzy layer): Here, Gaussian functions are selected. The degree of membership of each node is computed as follows:
$$ y=\exp \left(\frac{{\left(x-c\right)}^2}{\sigma^2}\right) $$ (2) $$ {\mu}_i^{S_i}=\exp \left(-\frac{{\left({x}_{i-{c}_{is_i}}\right)}^2}{\sigma_{is_i}^2}\right) $$ (3) where $ {c}_{is_i}\ \mathrm{and}\ {\sigma}_{is_i} $ indicate the membership center and width, respectively, i = 1, 2, …, n, si = 1, 2, …, mi, mi is the fuzzy division number of xi, and $ {\mu}_i^{s_i} $ is the membership function of the fuzzy set of input variables for each language variable value.
Third layer (fuzzy rule layer): The excitation intensity of each rule is calculated as follows:
$$ {T}_j={\mu}_i^{s_1}{\mu}_i^{s_{2j}}{\mu}_i^{s_{3j}}\dots {\mu}_i^{s_{nj}} $$ (4) where
$$ {s}_{1j}\in \left(1,2,\dots, {m}_1\right),\dots {s}_{nj}\in \left(1,2,\dots, {m}_n\right),j=1,2,\dots, m $$ (5) $$ m=\prod \limits_{i=1}^n{m}_i $$ (6) Fourth layer (fuzzy output layer): The percentage of the excitation intensity of each rule is calculated by the equation below:
$$ {T}_j=\frac{T_J}{\sum \limits_{j=1}^m{T}_J},j=1,2,\dots, m $$ (7) Fifth layer (output layer): The output layer is calculated as follows:
$$ {f}_k=\sum \limits_{j=1}^m{w}_{kj}{T}_j,k=1,2,\dots, r $$ (8) Given that the number of fuzzy divisions of the input component has been determined, the parameter to be learned is the connection weight of the last layer and the central value $ {c}_{is_i} $ and width $ {\sigma}_{is_i}\left(i=1,2,\dots, n;{s}_i=1,2,\dots, {m}_i\right) $ of the membership function in the second layer. The error cost function is obtained as follows: where ydk and yk represent the expected output and actual output of the neural network, respectively. Error backpropagation, $ \frac{d E}{{d w}_{kj}},\frac{d E}{{d c}_{is_i}},\frac{d E}{{d\sigma}_{is_i}} $ is calculated using the gradient descent method to adjust $ {w}_{kj},{c}_{is_i},{\sigma}_{is_i} $. The learning algorithm is as follows:
$$ {w}_{kj}\left(x+1\right)={w}_{kj}(x)-\beta \frac{dE}{dw_{kj}} $$ (9) $$ {c}_{{i\mathrm{s}}_i}\left(x+1\right)={c}_{is_i}(x)-\beta \frac{dE}{dc_{is_i}} $$ (10) $$ {\sigma}_{is_i}\left(x+1\right)={\sigma}_{is_i}(x)-\beta \frac{dE}{d{\sigma}_{is_i}} $$ (11) where β > 0 is the learning rate, x is the index of the current parameter, and x + 1 is the index of the updated parameter (Liu et al. 2016).
3.2 Improved Simplified PSO Algorithm
The above-mentioned typical FNN training process adopts backpropagation and gradient descent to adjust the parameters, which easily fall into the local optimum, whereas the convergence speed is slow (Esteban et al. 2017.). In this paper, the improved and simplified PSO is used to train the FNN to improve the training efficiency and generalization capability. The traditional PSO algorithm converges slowly in the late evolutionary stage and is easily trapped into local optima. A simplified PSO algorithm was proposed in a previous study (Hu 2007), as shown in Eq. (12):
$$ {x}_{id}^{t+1}={wx}_{id}^t+{c}_1{r}_1\left({p}_{id}^t-{x}_{id}^t\right)+{c}_2{r}_2\left({p}_{gd}^t-{x}_{id}^t\right) $$ (12) where w is the inertia factor, r1 and r2 are random numbers that follow the uniform distribution of [0, 1], c1 and c2 are acceleration factors, and xidt is the current position of the d-dimensional subspace of particle i in the tth iteration. During the iteration, the particle updates the position by tracking the individual extreme pi and the population extreme pg. In Eq. (12), the first part on the right represents the impact of the previous moment, and the global and local search capabilities can be balanced by adjusting the inertia factor. The second part characterizes the influence of the historical extreme value of the particle on the current particle motion trend and shows a strong local search capability. The third part describes the influence of population extremum on the current particle motion trend, which shows the information sharing of particle swarms. The algorithm removes the velocity term of the particle and can find the optimal solution by iterating under the condition of only the position information. The optimization equation is changed from second order to first order. As a result, the algorithm becomes simpler and more efficient.
Other studies are referenced (Zhou et al. 2015; Lee 2010) and used to achieve the following improvements in the simplified PSO algorithm to increase the population diversity, speed up convergence, and avoid premature phenomena. Based on the simplified PSO algorithm, the effects of random individual optimal candidate solutions are added, and the information shared between particles is expressed. Laplacian coefficients are introduced using inertia weight factors and learning factors to increase population diversity and speed up convergence, thereby improving training efficiency. The simplified PSO algorithm is improved by using Eq. (13), where xjdt is a random individual optimal candidate solution, and i and j are unequal, λ is a Laplacian coefficient, and ξ is a constraint function.
$$ {\displaystyle \begin{array}{l}{x}_{id}^{t+1}={wx}_{id}^t+{c}_1{r}_1\left({p}_{id}^t-{x}_{id}^t\right)\\ {}{c}_2{r}_2\left({p}_{gd}^t-{x}_{id}^t\right)+\lambda \xi \left({p}_{jd}^t-{x}_{id}^t\right)\end{array}} $$ (13) In accordance with the fitness of the error cost function in Section 2.2, the improved fuzzy PSO algorithm is used to adjust the parameters of the FNN. This step not only ensures the diversity of particle swarms and enhances the capability of local optimization, but also improves the generalization capability of the network.
3.3 Submarine and Equipment Control Inference Engine
The input probability of the submarine, the detection frequency of the detection platform, and the relative movement of the submarine and detection platform are considered as inputs. The submarine noise-source equipment operating conditions and the submarine movement status are used as outputs, and a FNN inference engine is constructed (Figure 2). The noise-source equipment includes a fifth cabin box, a hydraulic pump unit, a main hydrophobic pump, a bilge pump, a sea water pump, a shafting oil pump, and a propulsion motor, whereas the submarine motion status includes the change amounts of depth and speed.
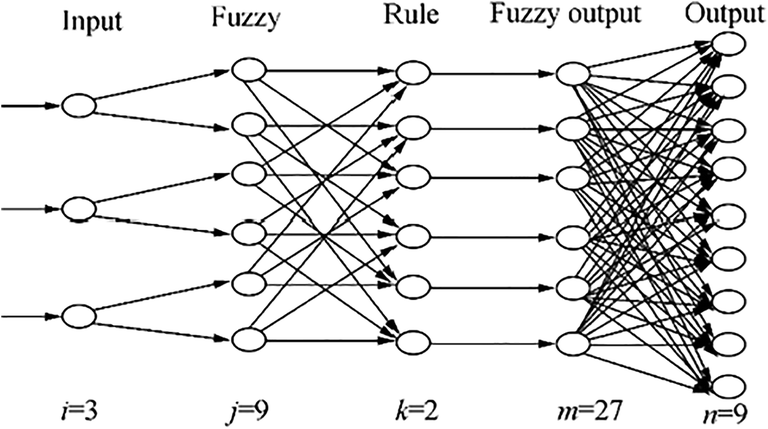 Figure 2 FNN inference engine
Figure 2 FNN inference engineIn accordance with the expert experience and model simulation tests, the training set required for the training of the FNN inference engine is formulated, as shown in Table 1, where NUM, DB, DP, MT, CD, CV, FCB, HP, DP, BP, WP, OP, and PM denote the number of samples, detection band, detection probability, movement trend, change in depth, change in velocity, fifth cabin box, hydraulic pump, drain pump, bilge pump, water pump, oil pump, and propulsion motor, respectively. The formulation of the training set mainly considers three aspects of the decision-making elements: the noise of each noise-source equipment at each frequency band, the influence of the submerged depth on transmission loss, and the relationship between the detection threshold and detection probability. Specifically, based on expert experience and test results, corresponding submarine motion conditions and submarine noise-source equipment control scheme are formulated for each detection frequency band, detection probability, and relative motion trend, forming a training set.
Table 1 FNN partial training samplesNUM DB (Hz) DP MT (m) CD (m) CV (m/s) FCB HP DP BP WP OP PM 1 200 0.5 − 200 5 0.5 0.9 0.9 0.9 0.1 0.9 0.9 0.9 2 200 0.5 200 0 0 0.9 0.9 0.9 0.1 0.9 0.9 0.9 3 200 0.6 − 200 10 1 0.9 0.9 0.9 0.1 0.1 0.9 0.9 4 200 0.6 200 5 0.5 0.9 0.9 0.9 0.1 0.1 0.9 0.9 5 200 0.7 − 200 15 1.5 0.9 0.9 0.9 0.1 0.1 0.9 0.7 6 200 0.7 200 10 1 0.9 0.9 0.9 0.1 0.1 0.9 0.7 7 200 0.8 − 200 30 2 0.9 0.9 0.9 0.1 0.1 0.1 0.7 8 200 0.8 200 25 1.5 0.9 0.9 0.9 0.1 0.1 0.1 0.7 9 200 0.9 − 200 50 2.5 0.9 0.1 0.1 0.1 0.1 0.1 0.5 10 200 0.9 200 45 2 0.9 0.1 0.1 0.1 0.1 0.1 0.5 11 200 1.0 − 200 70 3 0.1 0.1 0.1 0.1 0.1 0.1 0.3 12 200 1.0 200 65 2.5 0.1 0.1 0.1 0.1 0.1 0.1 0.3 The first layer is the input layer. This layer comprises three nodes corresponding to the detection frequency f (in Hz) of the probing platform, the probability of detection Pd of the submarine, and the relative motion trend d of the submarine and detection platform (represented by a change in distance after 60 s; the unit is m).
The second layer is the fuzzy layer. This layer consists of nine nodes representing nine membership functions that complete the membership function value. Each node represents a linguistic variable. The detection platform detects the frequency band in Hz and assigns three language variable values, namely, "high frequency, " "intermediate frequency, " and "low frequency." The membership center is 1000, 550, and 100, and the width is 900. The probability of detection of submarines is assigned to three language variables, namely, "large, " "medium, " and "small." The degree of membership is 1.0, 0.75, and 0.5, and the width is 0.5. The relative movement of the submarine and the detection platform, in units of m, gives three linguistic variables, namely, "approach, " "invariant, " and "away, " with a membership center of − 200, 0, and 200, and a width of 400.
The third layer is the fuzzy rule layer. This layer includes 27 nodes, each of which represents a fuzzy rule. The fitness of each rule is calculated.
The fourth layer is the fuzzy output layer; it contains 27 nodes that normalize the degree of regular fitness.
The fifth layer is the output layer. This layer comprises nine nodes that represent the change amounts of the depth and speed, operating conditions of the fifth cabin box, hydraulic pump unit, main hydrophobic pump, bilge pump, sea water pump, shafting oil pump, and propulsion motor. The submarine equipment operating conditions are as follows. Five working conditions are used for stages 0–4 of the propulsion motors, and two working conditions are used for opening and closing the other equipment. The thresholds for the four working conditions of the propulsion motors are 0.2, 0.4, 0.6, and 0.8, whereas that for the other two conditions of other equipment is 0.5. For the submarine movement status, the specific change amounts of the depth, and speed are calculated.
The improved and simplified PSO algorithm has a population size of 20 and iteration times of 100. The FNN parameters are adjusted through multiple iterations. At the same time, a comparative training process based on the backpropagation algorithm is given. The learning rate is set to 0.1 and the number of iterations is 100.
Figure 3 shows a mean square error diagram for the two training processes of the equipment control scheme. For the fifth cabin box control output, the mean square error of the backpropagation algorithm is reduced by 82 iterations to 0.01 and 100 iterations to 0.0089. The mean square error of the improved and simplified PSO algorithm is reduced to 0.01 by 60 iterations and 0.0027 by 100 iterations. The training results show that the improved simplified PSO algorithm can well generalize the test data, and the training efficiency of the algorithm is evidently better than the backpropagation algorithm. In future research, large-scale data training can significantly improve training efficiency.
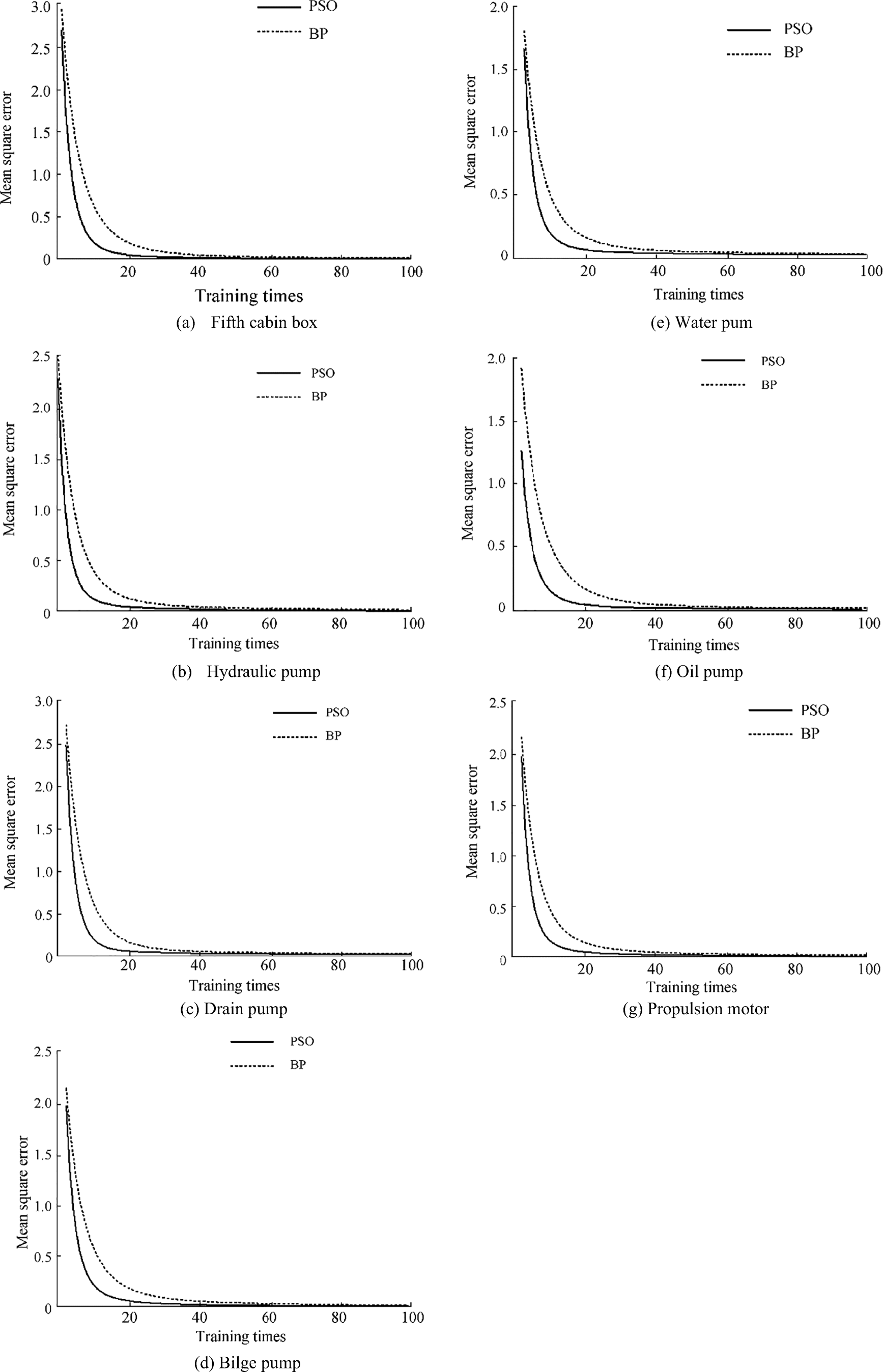 Figure 3 FNN training process
Figure 3 FNN training processIn addition, referencing previous studies (Zhang et al. 2012; Fewell et al. 2008) combined with the submarine stealth and other factors, the submarine maneuver avoidance algorithm for the detection platform is given as follows:
When the submarine detection probability given by the situation assessment is greater than 0.5, the location of submarine maneuver evading depends on the number of exploration platforms and the probability of detection of the submarine. A maneuver avoidance algorithm is established in the Cartesian coordinate system. Here, the stealth threat known to the submarine is considered to originate from the condition of a single detection platform, and the heading is changed to be opposite that of the straight direction of the detection platform.
In combination with the submarine status and equipment control plan described above, three submarine stealth assistant decision schemes are generated: scheme 1 for submarine speed and noise-source equipment control, scheme 2 for deep control and noise-source equipment control and maneuver avoidance, scheme 3 for submarine submersible deep control and maneuver avoidance.
4 Submarine Stealth Assistant Decision Simulation
In accordance with the aforementioned FNN training results, the training parameters are solidified into the FNN to form an inference engine based on the FNN. Based on the submarine movement status, equipment operating conditions and latitude and longitude of the maneuvering submarine are determined under the three schemes. The submarine sound source level corresponding to the scheme is calculated by the sound source level calculation model. The transmission loss corresponding to the solution is calculated through the underwater acoustic transmission loss model. The probability of detection of the submarine corresponding to the scheme is calculated through the stealth situation assessment model. The sound source level, transmission loss, and the probability of detection of the submarine are achieved under the candidate scheme. Depending on the current submarine sound source level, transmission loss, and detected probability, the change rate of sound source level, propagation loss, and probability of detection are calculated under the alternative scheme and compared with the current one as a scheme performance indicator. This step will provide the reference for the commander to evaluate the scheme.
Based on the submarine stealth assistant decision system proposed in this paper, VC++ software is implemented for the auxiliary decision-making scheme auto-generation module, the auxiliary decision-making scheme simulation deduction module, the scheme selection module, and the track display module.
4.1 Submarine Source Level
The sound source level calculation method based on the device acceleration and transfer function is adopted, in which the transfer functions and accelerations of the equipment under various working conditions have been given. As shown in Figure 4, the sound pressure assessment points are selected in the horizontal section of the horizontal plane of the hull and the base of the propulsion motor. The weekly assessment points are evenly distributed at an interval of 10° and are located at a distance of 1000 m from the center of the plane where 72 reference points are present. The 72 sound pressure level reference points from the sound pressure level are transferred to the 1-m hull to obtain the sound source level of 72 points around the hull (Chwaszczewski et al. 2010).
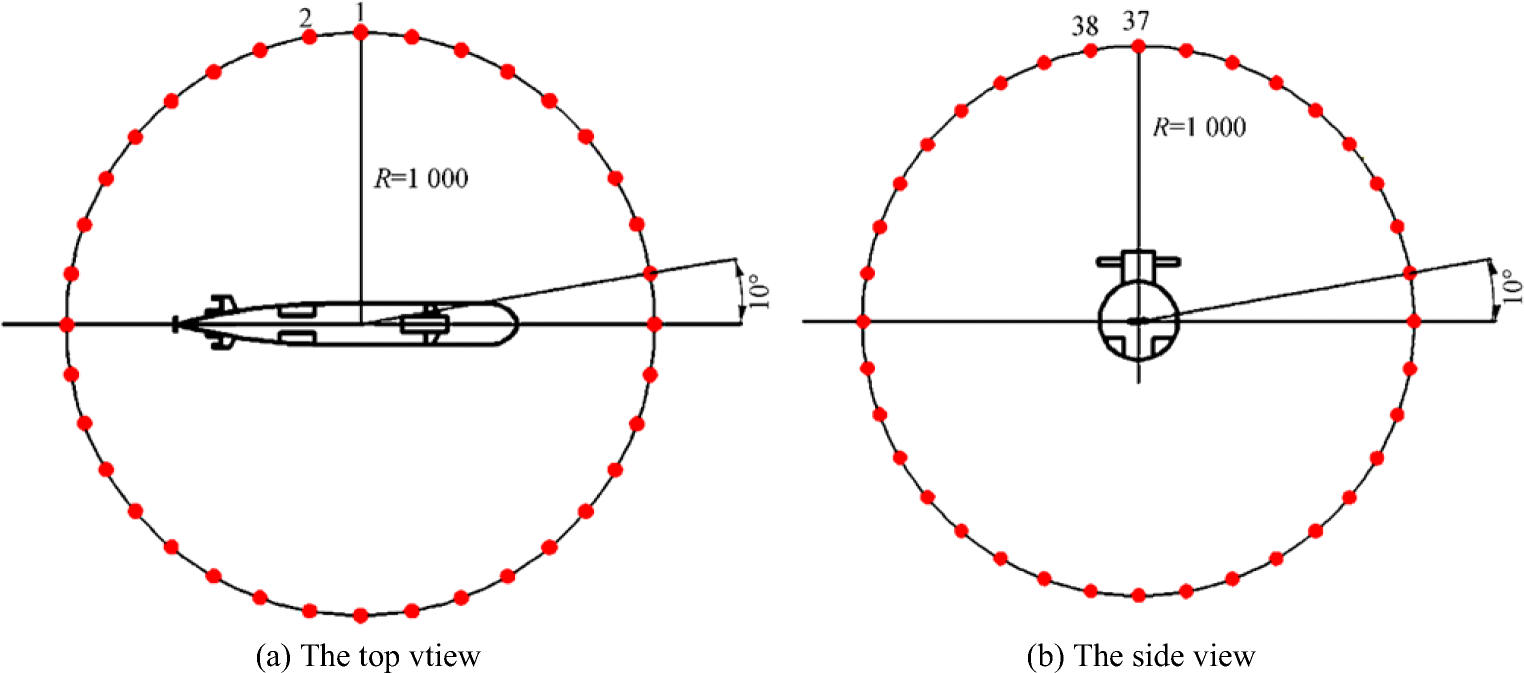 Figure 4 Submarine sound pressure assessment point diagram
Figure 4 Submarine sound pressure assessment point diagramThe equivalent sound source level at each point is obtained from the acoustic radiation calculation model:
$$ \mathrm{spl}={20}^{\ast }1g(a)+H $$ (14) $$ \mathrm{sp}={p_0}^{\ast }{10}^{spl/20} $$ (15) where spl is the sound source level (dB) of the stand-alone device, a is the device acceleration (m ∕ s2), H is the transfer function of the device to an equivalent sound source, sp is the sound pressure (Pa), and p0 is the reference sound pressure level with a value of 0.000001.
For the equivalent source point i, the sound pressure level spi from all equipment is calculated at this point; in the formula, j is the device number and N is the total number of devices:
$$ {\mathrm{sp}}_i=\sqrt{\sum\nolimits_{j=1}^N{\mathrm{sp}}^2} $$ (16) Given the above calculation process, the sound source levels of 72 equivalent sound source points can be sequentially calculated. The equivalent sound source level SL at the direction of the detection platform in the submarine hull coordinate system is calculated by interpolation.
4.2 Transmission Loss
Based on the M-S sound transmission loss calculation formula, the following estimation formula is used to calculate the sound transmission loss from the submarine to the detection platform (Sun et al. 2014).
First, the distance is defined as follows:
$$ R={\left[\frac{1}{3}\left(H+L\right)\right]}^{\frac{1}{2}} $$ where H is the depth of seawater, and L is the depth of the mixed layer on shallow sea surface; the unit is km. The following estimation formulas are used:
$$ TL=\left\{\begin{array}{c}20\lg (r)+ ar+60-{k}_L\left(r \lt R\right)\\ {}151\mathrm{g}(r)+ ar+{a}_r\left(\frac{r}{H}-1\right)+10\lg (H)+60-{k}_L\left(R \lt r \lt 8R\right)\\ {}10\lg (r)+ ar+{a}_r\left(\frac{r}{H}-1\right)+10\lg (H)+64.5-{k}_L\left(r \gt 8R\right)\ \end{array}\right. $$ (17) where r is the horizontal distance (km), a is the seawater absorption index (dB/km), KL is the near field propagation anomaly (dB/km), and ar is the shallow sea attenuation coefficient (dB/km).
4.3 Detection Probability
The following calculation method gives the probability of detection of a submarine (Ainslie 2010).
According to sonar equation:
$$ \mathrm{SL}-\mathrm{TL}\hbox{--} \mathrm{NL}+\mathrm{DI}=\mathrm{DT}. $$ $$ SE\ \mathrm{model}:\mathrm{SE}=\mathrm{SL}+\mathrm{DI}-\mathrm{TL}-\mathrm{NL}-\mathrm{DT}. $$ where the source level SL and the transmission loss TL have been calculated. The reception directional index DI and the marine environment noise NL are given as input, and the sonar detection threshold DT is calculated from the detection probability threshold pfa and the false alarm rate pT:
$$ \begin{gathered} \mathrm{DT}=10\lg\ \left(\frac{\lg \left({p}_{f\mathrm{a}}\right)}{\lg \left({p}_T\right)}-1\right) DT\\ =10\lg\ \left(\frac{\lg\ \left({p}_{fa}\right)}{\lg\ \left({p}_T\right)}-1\right) \end{gathered} $$ (18) The probing probability of the submarine is calculated using the detection platform:
$$ {P}_d={p_{fa}^{1+10}}^{\frac{1}{\frac{SL- TL- NL+ DI}{10}}} $$ (19) The sound source level, transmission loss, and probability of detection of the submarine under the candidate program are obtained. Given the current submarine sound source level, transmission loss, and detected probability, the change rate of sound source level, transmission loss, and probability of detection is calculated under the alternative scheme and compared with the current one. The result is used as a performance indicator of the scheme.
4.4 Simulation Results
The submarine's voyage path is set in advance, and a passive sonar detection platform with known performance parameters is set up near the path to perform simulation tests. Figure 5 shows a schematic of the stealth voyage process of a submarine in an area of the East China Sea. The submarine's normal status is assumed to use equipment that is fully open at a speed of 6.4 m/s and a submerged depth of 80 m. The circular area indicates the detection platform. If the submarine moves along the planned path, it will pass through the detection range of the unknown upper left corner detection platform. This process acquires the status information of the previously unknown detection platform by receiving the situation information. The detection probability at this time is 0.75. Based on the situation information, the submarine stealth assistant decision is made, and the assistant decision-making scheme, including the aiming equipment's condition, aiming position, aiming depth, and aiming speed, is obtained as shown in Figure 6, where NUM denotes the number; PM, the operating condition of propulsion motor; FCB, the operating condition of fifth cabin box; HP, the operating condition of the hydraulic pump; DP, the operating condition of drain pump; BP, the operating condition of bilge pump; WP, the operating condition of water pump; OP, the operating condition of oil pump; AD, the aiming depth; ALAT, the aiming latitude; ALON, the aiming longitude; AV, the aiming velocity; SL, the source level; TL, the transmission level; CSL, the change in source level; CTL, the change in transmission level; CASL, the change rate of source level; CATL, the change rate of transmission level; DP, the probability of detection. Scheme 1 only controls the submarine speed and noise-source equipment, thus reducing the sound source level; scheme 2 controls submarine depth and noise-source equipment and maneuver avoidance, which reduce the sound source level and increases transmission loss; scheme 3 controls the submarine depth and maneuver avoidance, which increase transmission loss. All three schemes are provided to achieve a zero probability of detection. This condition shows that the commander can select and modify the schemes in accordance with the requirements to meet the needs of stealth assistant decision-making.
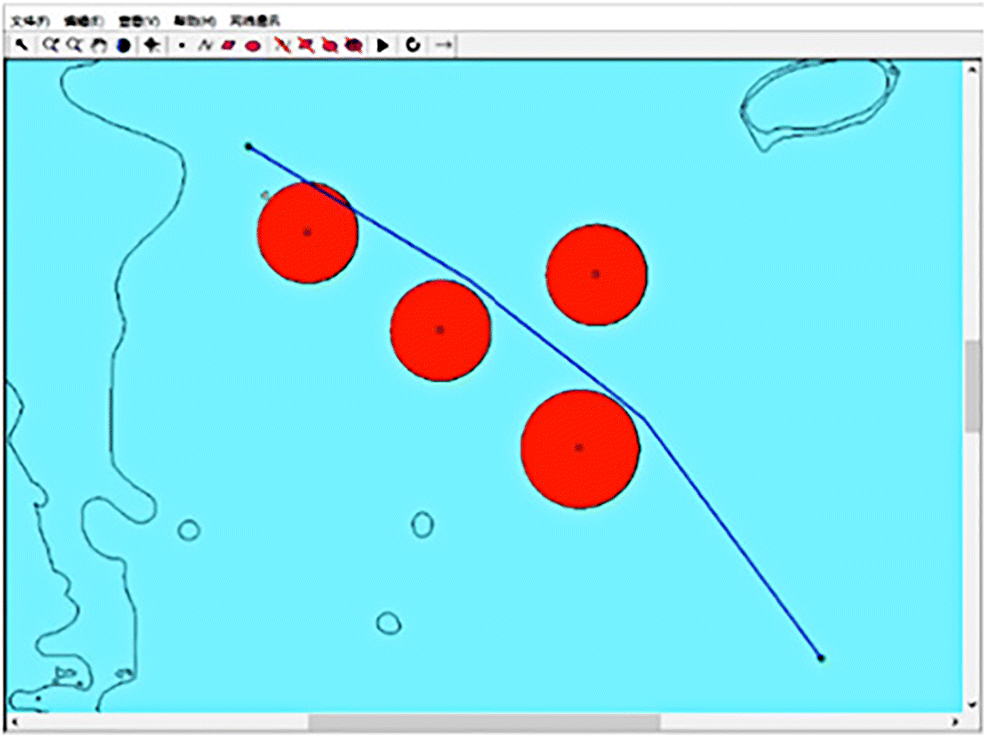 Figure 5 Submarine stealth ferry process
Figure 5 Submarine stealth ferry process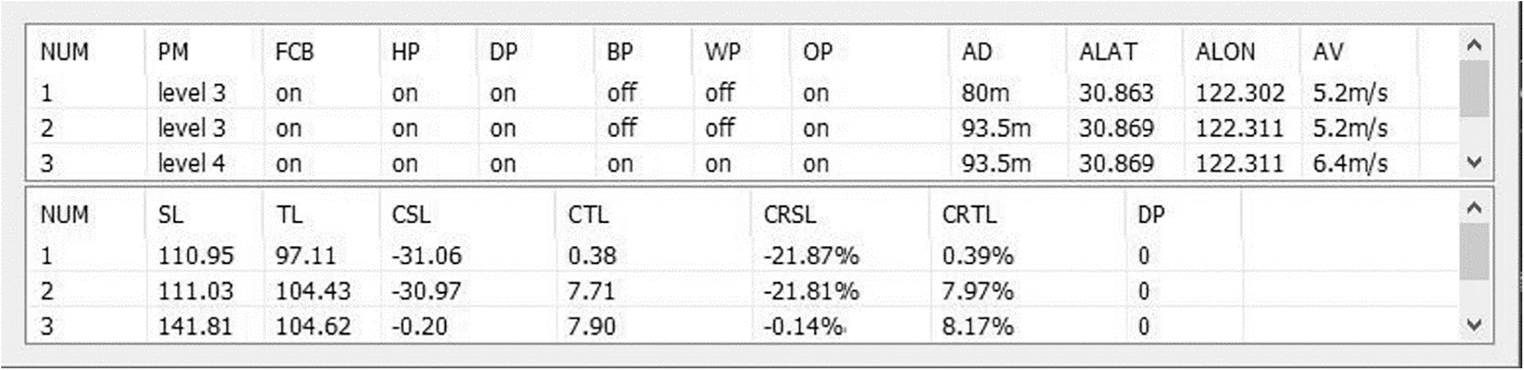 Figure 6 Simulation test results
Figure 6 Simulation test resultsThe experimental results show that the submarine stealth assistant decision system described in this paper can quickly and efficiently produce assistant decision-making schemes, including the submarine, and equipment control and maneuver avoidance. The schemes are in line with the combat experience and the results of the pre-model simulation experiments, and the simulation deduction evaluates the rationality and effectiveness of the selected scheme, providing the commander with adequate decision support.
5 Conclusions
In this paper, a submarine stealth assistant decision system is established for submarine stealth voyage missions. Combat experience and model simulation experiments are used to train the FNN inference engine based on the improved and simplified PSO algorithm. The system receives the submarine stealth situation assessment results, generates submarine and its equipment control schemes by the inference engine, uses the maneuver avoidance algorithm, and gives the submarine maneuver avoidance aiming location. Decision-making alternative schemes are achieved through submarine and its equipment control and maneuver avoidance. The system can improve the efficiency of decision-making.
1) The improved and simplified PSO algorithm enhances the optimization capability of the particle swarm, effectively improves the convergence speed and training efficiency, reduces the computational complexity, and is quick, accurate, and easy to implement.
2) Based on the submarine acoustic radiation model, underwater acoustic transmission loss model, and submarine stealth situation assessment model, the evaluation of the selected scheme ensures the rationality and effectiveness of the decision and provides decision support for the commander.
3) At the same time, the commander can use the software's scheme selection module to select and modify the final implementation of the scheme, increasing the scheme's adaptability. The implemented scheme self-learns through the FNN and can continuously enhance the adaptability of the inference engine.
The submarine stealth assistant decision system features the following deficiencies:
1) The location and performance parameters of the detection platform are difficult to obtain when performing actual stealth voyage missions.
2) The expert experience mentioned above comes from the relevant literature. Communication with experts and summary of relevant experience and knowledge are also needed.
-
Figure 1 Submarine stealth assistant decision system flow
Figure 2 FNN inference engine
Figure 3 FNN training process
Figure 4 Submarine sound pressure assessment point diagram
Figure 5 Submarine stealth ferry process
Figure 6 Simulation test results
Table 1 FNN partial training samples
NUM DB (Hz) DP MT (m) CD (m) CV (m/s) FCB HP DP BP WP OP PM 1 200 0.5 − 200 5 0.5 0.9 0.9 0.9 0.1 0.9 0.9 0.9 2 200 0.5 200 0 0 0.9 0.9 0.9 0.1 0.9 0.9 0.9 3 200 0.6 − 200 10 1 0.9 0.9 0.9 0.1 0.1 0.9 0.9 4 200 0.6 200 5 0.5 0.9 0.9 0.9 0.1 0.1 0.9 0.9 5 200 0.7 − 200 15 1.5 0.9 0.9 0.9 0.1 0.1 0.9 0.7 6 200 0.7 200 10 1 0.9 0.9 0.9 0.1 0.1 0.9 0.7 7 200 0.8 − 200 30 2 0.9 0.9 0.9 0.1 0.1 0.1 0.7 8 200 0.8 200 25 1.5 0.9 0.9 0.9 0.1 0.1 0.1 0.7 9 200 0.9 − 200 50 2.5 0.9 0.1 0.1 0.1 0.1 0.1 0.5 10 200 0.9 200 45 2 0.9 0.1 0.1 0.1 0.1 0.1 0.5 11 200 1.0 − 200 70 3 0.1 0.1 0.1 0.1 0.1 0.1 0.3 12 200 1.0 200 65 2.5 0.1 0.1 0.1 0.1 0.1 0.1 0.3 -
Ainslie M (2010) Principles of sonar performance modelling. Springer, Berlin. https://doi.org/10.1007/978-3-540-87662-5 Chwaszczewski RS, Slater Michael, Snyder Jennifer, Tietje E, Green Robert (2009) Reinventing submarine signature measurements: Installation of the High Gain Measurement System at SEAFAC. 1–6. https://doi.org/10.23919/OCEANS.2009.5422077 Esteban LG, Palacios PD, Conde M, Fernández FG, García-Iruela A, González-Alonso M (2017) Application of artificial neural networks as a predictive method to differentiate the wood of pinus sylvestris, l. and pinus nigra, arn subsp. salzmannii, (dunal) franco. Wood Sci Technol 51(5): 1249–1258. https://doi.org/10.1007/s00226-017-0932-7 Eugene M (2007) Can Russian strategic submarines survive at sea? The fundamental limits of passive acoustics. Sci Glob Secur 4(2): 213–251. https://doi.org/10.1080/08929889408426401 Fewell MP, Thredgold J, Kershaw DJ (2008) Benefits of sharing detections for networked track initiation in anti-submarine warfare. Edinburgh, S. Aust: Maritime Operations Division, Defence Science and Technology Organisation. http://pandora.nla.gov.au/pan/24592/20080825-1003/DSTO-TR-2086%20PR.pdf http://pandora.nla.gov.au/pan/24592/20080825-1003/DSTO-TR-2086%20PR.pdf He T, Sun YD, Wu WW, Wu YS (2015) Low noise collocation on fluid pipeline system. J Ship Mech 19(9): 1149–1159. https://doi.org/10.3969/j.issn.1007-7294.2015.09.011 Hu W, Li ZS (2007) A simpler and more effective particle swarm optimization algorithm. Journal of Software 18(4): 861-868. CNKI: SUN: RJXB. 0.2007-04-008 Jian WU, Dai J, Zhou J, Yuhua YU (2011) Active avoidance technique by stealth course planning in complicate battlefield environment. J Projectiles Rocket Missiles Guid 31(4): 172–171. https://doi.org/10.15892/j.cnki.djzdxb.2011.04.025 Kui DU, Cheng GL (2010) Method of submarine noise monitoring based on on-board equipment. Ordnance Industry Automation 2: 5–7 CNKI: SUN: BGZD. 0.2010-02-004 Lee CY (2010) Non-linear system control using a recurrent fuzzy neural network based on improved particle swarm optimisation. Taylor & Francis, Inc, Milton Park, pp 381–395. https://doi.org/10.1080/00207720903045783 Li SZ (2012) The research of assessment model for network learning based on adaptive network-based fuzzy inference system. Comput Technol Autom 31(2): 129–132. https://doi.org/10.3969/j.issn.1003-6199.2012.02.030 Liao SH (2000) Case-based decision support system: architecture for simulating military command and control. Eur J Oper Res 123(3): 558–567. https://doi.org/10.1016/s0377-2217(99)00109-5 Liu YJ, Jiang BB, Du L, Chen L (2016) The application of expert system based on FNN in decision on the optimum crop growth environment. J Shenyang Ligong Univ 35:26. https://doi.org/10.3969/j.issn.1003-1251.2016.03.005 Ovalle D, García-Pelaez J (2016) Minimizing underwater noise generated by submarine maneuvering: an optimal control approach. IEEE J Ocean Eng 41(2): 362–372. https://doi.org/10.1109/joe.2015.2444531 Pan X, Yan T, Juniper R (2008) Active control of radiated pressure of a submarine hull. J Sound Vib 311(1–2): 224–242. https://doi.org/10.1016/j.jsv.2007.09.001 Qiang SU, Wang GB, Zhu PF, Song Y (2014) Summarize of foreign submarine acoustic stealth frontier technologies development. Ship Sci Technol 1:1–9. https://doi.org/10.3404/j.issn.1672-7649.2014.01.001 Sun F, Gao F, Pan C, Shengquan LI, Wang B (2014) Comparative analysis of Marsh-Schulkin and Rogers model. Hydrogr Surv Charting 34(3): 44–47. https://doi.org/10.3969/j.issn.1671-3044.2014.03.012 Sun XH, Da LL, Li YY (2015) Research on underwater 3d acoustics energy field simulation and visualization method. Ship Sci Technol 9: 120–124 CNKI: SUN: JCKX. 0.2015–09-024 Tang Z (2007) Study on method of evaluating acoustic stealth situation of submarine. J Wuhan Univ Technol 31(1): 17–20. https://doi.org/10.3963/j.issn.2095-3844.2007.01.005 Vostakolaee ES, Amirshahi B (2016) Designing a DSS to explore cement mines using fuzzy neural networks. International Congress on Technology. IEEE. Wang Y (2010) A present situation and development of noise control for submarines abroad. Ship Electron Eng 1: 7–10 CNKI: SUN: JCGC. 0.2010–01-003 Yang M, Yang SL, Xu X, Ju RS, Huang KD (2016) Framework of operational analytic simulation in high level decision-making system. Syst Eng Electron 6:1440–1449. https://doi.org/10.3969/j.issn.1001-506X.2016.06.34 Zhang LL, Yang RJ, Gao XQ (2012) Research on submarine localization and evasion on sonobuoys array. Fire Control Command Control 37(5): 27–30. https://doi.org/10.1007/s11783-011-0280-z Zhou D, Nan JC, Gao MM (2015) Fuzzy neural network for modeling based on improved simplified particle swarm optimization. Appl Res Comput 32(4). https://doi.org/10.3969/j.issn.1001-3695.2015.04.009
