武汉劳雷绿湾船舶科技有限公司,湖北 武汉 430083
收稿日期: 2022-02-23.
作者简介: 马卫泽(1966-),男,高级工程师,研究方向为高速船舶及推进装置设计与制造
Research on surface piercing propeller hydrodynamic performance of 50 kn high-speed unmanned boat
Wuhan Greenbay Marine Technology Co., Ltd., Wuhan 430083, China
0 引 言 半浸式螺旋桨(以下简称“半浸桨”)是应用于高速艇或超高速艇上的一种比较特殊的螺旋桨类型,是部分桨叶露出水面而正常工作的螺旋桨。这类桨与常规螺旋桨相比,可获得较高的效率。相对于常规桨而言,高速时不但可获得较高的敞水效率,而且由于桨轴等附件露出水面,从而大大减小了附体阻力[1]。Szantyr[2]和Rain[3]对半浸桨和常规空泡桨以及喷水推进器进行了对比研究,证实了在高速时使用半浸桨的船舶整体性能明显优于其他类型推进装置的船舶。尽管半浸式螺旋桨的设计和使用从20世纪就已开始,但是仍然没有一个比较精准的设计方法,都是在不断试错的过程中逐步调整设计参数,通过多次的实船试验取得最终的设计结果。
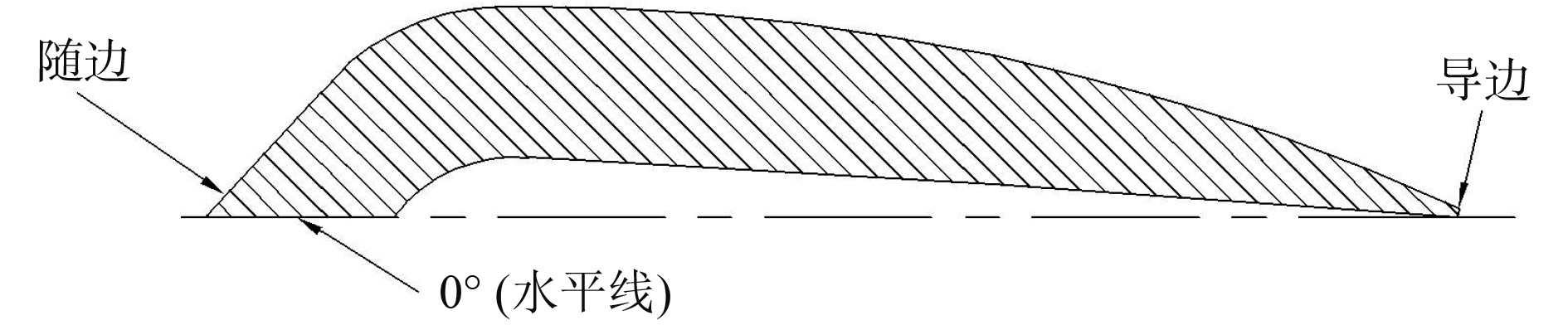
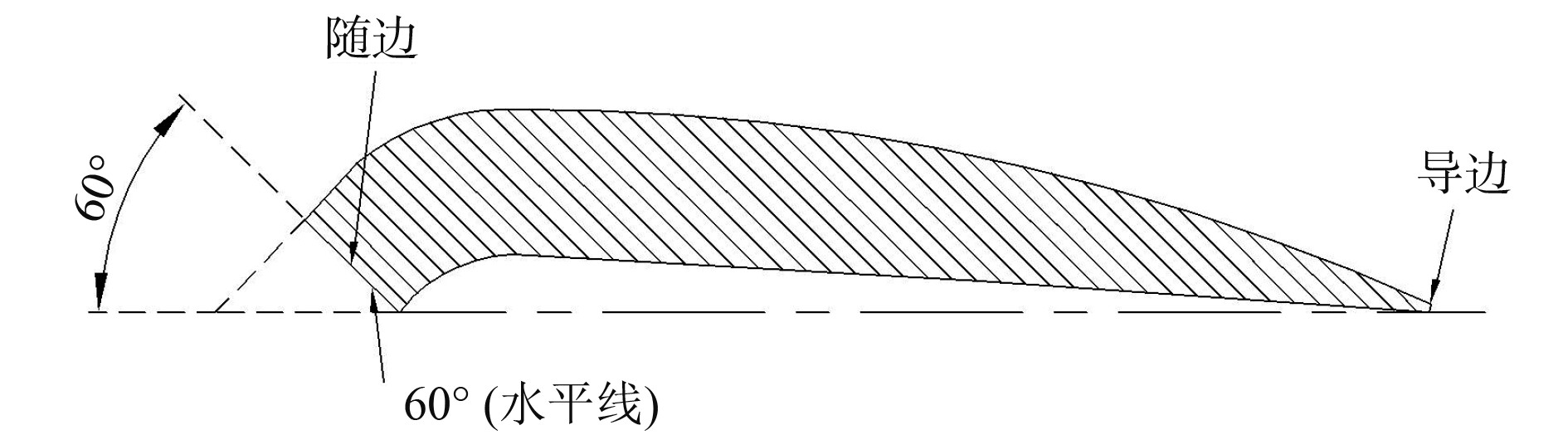
2012年,Misra等[4]发表了关于半潜式螺旋桨的实验研究结果,这种螺旋桨具有常规螺旋桨在不同浸泡比下的共同几何形状。比较了实验数据如叶片的力和力矩与计算流体动力学方法的结果,开发了一系列的不同横截面的四叶半浸桨,随边楔形面角度分别为0°,30°和60°。实验结果表明,在所有浸深比下,60°楔形面角度对半浸桨的性能有较大的影响,此时半浸桨的效率达到最大值。
本文对10.3 m高速艇半浸桨叶进行设计和对比,通过实船航行试验验证了桨叶随边楔形角对效率的影响,在实船初期航速不达标的情况下,通过对桨叶随边位置楔形角进行更改设计后再试验,最终航速达到并超过了设计航速。
1 关键问题 1.1 半浸桨的受力分析 当半浸桨全部浸没在水中,它的推力与扭矩大小都是恒定的,由水流产生的压力大小可忽略不计。然而半浸式螺旋桨在运转时其桨叶一半在水面上,另一半在水面下,且桨叶交替入水(见图1),产生的推力和扭矩是随着船舶的航行状态的变化而变化的,从而对半浸式螺旋桨的桨叶产生了不同的交变应力(见图2)。
表 1(Tab. 1)

表 1 10.3 m无人高速艇主尺度参数
Tab. 1 10.3 m high speed oat data
| 参数 |
数值 |
参数 |
数值 |
| 船长/m |
10.3 |
主机额定转速/r·min−1 |
3500 |
| 船宽/m |
2.8 |
减速比 |
1.55 |
| 满载排水量/kg |
6200 |
推进器型号Greenbay Marine |
MSD300 |
| 主机功率/hp |
450×2 |
重心位置/m |
距艉封板2.74 |
|
表 1 10.3 m无人高速艇主尺度参数
Tab.1 10.3 m high speed oat data
|
当半浸桨在运转过程中,桨叶有一半处于水面下,整个桨叶的受力分布有着很大的不均匀性和不对称性,因此半浸桨除了能产生推力外,还会产生垂向升力及侧向水平力,这2个力同样具有周期性和不对称性,且半浸桨桨轴在水平方向有一定倾角时,能得到水平力与对力的合成应力,从而形成对船艇的更大的推力。
1.2 半浸桨的受力计算方程 对于半浸桨在水中各项数值的定义方程式为:水平推力系数:
$ {K_T} = \dfrac{T}{{\rho {n^2}{D^4}}} $
;力矩系数:
$ {K_Q} = \dfrac{Q}{{\rho {n^2}{D^5}}} $
;转矩:
$ Q = \rho {n^2}{D^5}{K_Q} $
;进速系数:
$ J = \dfrac{{{V_A}}}{{nD}} $
;推进效率:
$ \eta = \dfrac{{T{V_A}}}{{2{\text{π}} nQ}} = \dfrac{{{K_T}}}{{{K_Q}}}\dfrac{J}{{2{\text{π}} }} $
;负载函数:
${\raise0.7ex\hbox{${{{{K}}_Q}}$} \mathord{\left/ {\vphantom {{{{{K}}_Q}} {{{{J}}^{\text{5}}}}}}\right.} \lower0.7ex\hbox{${{{{J}}^{\text{5}}}}$}} =\sqrt {\dfrac{{{{{P}}_d}{{{n}}^{\text{2}}}}}{{2{{{\text{π}} \rho }}{{{V}}^{\text{5}}}}}} $
;推力:
${{T}} = {\eta}\dfrac{{2{{{\text{π}} \rho }}{{{V}}^4}}}{{{{{n}}^2}}}\left( {{\raise0.7ex\hbox{${{{{K}}_Q}}$} \mathord{\left/ {\vphantom {{{{{K}}_Q}} {{{{J}}^5}}}}\right.} \lower0.7ex\hbox{${{{{J}}^5}}$}}} \right)$
。
1.3 半浸桨原始计算分析 根据计算方程式,并结合图3~图8的ROSE图谱得出相应的螺距比,求得半浸桨最佳参数为:直径560 mm;螺距850 mm;盘面比0.86;叶数4 ;螺旋桨在浸没面积为47%时效率最高为0.64。
表 2(Tab. 2)
表 2 10.3 m无人高速艇半浸桨设计参数
Tab. 2 Surface piercing propeller blades dimension and profile
| 桨叶名称 |
直径/mm |
螺距/mm |
盘面比 |
螺距比 |
叶数 |
| SPP01 |
560 |
850 |
0.85 |
1.52 |
4 |
| 桨叶剖面 |
|
|
表 2 10.3 m无人高速艇半浸桨设计参数
Tab.2 Surface piercing propeller blades dimension and profile
|
在进行半浸桨效率及推力计算时,主机功率、转速以及半浸桨桨叶吸收功率(见图9)是影响计算结果的重要数值,见表3。
表 3(Tab. 3)
表 3 半浸桨计算关联参数数据表
Tab. 3 Related data of surface piercing propeller calculation
| 航速/kn |
20 |
25 |
30 |
35 |
40 |
45 |
50 |
| 主机转速/r·min−1 |
2500 |
2800 |
3000 |
3120 |
3200 |
3340 |
3550 |
| 主机功率/hp |
300 |
330 |
350 |
380 |
420 |
430 |
450 |
| 螺旋桨效率 |
0.41 |
0.46 |
0.51 |
0.58 |
0.62 |
0.65 |
0.67 |
| 船体有效推进效率 |
0.38 |
0.42 |
0.47 |
0.53 |
0.57 |
0.59 |
0.61 |
|
表 3 半浸桨计算关联参数数据表
Tab.3 Related data of surface piercing propeller calculation
|
表 5(Tab. 5)
表 5 无人艇2.74 m重心位置半浸桨水动力特性计算(h/D=47%)
Tab. 5 USV Hydrodynamic characteristics (h/D=47%, LCG=2.74 m)
| 半浸桨参数航速/kn |
$ J $
|
$ {K_T} $
|
$ {K_Q} $
|
$ {\raise0.7ex\hbox{${{K_Q}}$} \mathord{\left/ {\vphantom {{{K_Q}} {{J^5}}}}\right.} \lower0.7ex\hbox{${{J^5}}$}} $
|
$ \eta $
|
${\text{T}}$
/kg
|
| 20 |
0.854 |
0.118 |
0.0571 |
0.013 |
0.46 |
901 |
| 30 |
1.025 |
0.01 |
0.0366 |
0.032 |
0.55 |
897.7 |
| 40 |
1.139 |
0.076 |
0.0254 |
0.013 |
0.61 |
896.1 |
| 50 |
1.22 |
0.056 |
0.0171 |
0.006 |
0.64 |
805.8 |
|
表 5 无人艇2.74 m重心位置半浸桨水动力特性计算(h/D=47%)
Tab.5 USV Hydrodynamic characteristics (h/D=47%, LCG=2.74 m)
|
通过计算所得桨叶在30%,47%,58%三种浸没面积下的推力值(见表4~表6)与船模水池试验的阻力值对比结果显示,该船预报可达到最高航速为52 kn。但是通过后期的航行试验,实际最高航速只能达到46 kn,与预报航速52 kn还有6 kn的差距。通过改变桨叶直径、调整重心、调节半浸桨装置的纵向角度,以及在船底相关位置增设断级结构均无法有效提高航速。
表 4(Tab. 4)
表 4 无人艇2.74 m重心位置半浸桨水动力特性计算(h/D=30%)
Tab. 4 USV hydrodynamic characteristics (h/D=30%, LCG=2.74 m)
| 半浸桨参数航速/kn |
$ J $
|
$ {K_T} $
|
$ {K_Q} $
|
$ {\raise0.7ex\hbox{${{K_Q}}$} \mathord{\left/ {\vphantom {{{K_Q}} {{J^5}}}}\right.} \lower0.7ex\hbox{${{J^5}}$}} $
|
$ \eta $
|
T/kg
|
| 20 |
0.529 |
0.057 |
0.0219 |
0.529 |
0.22 |
695.7 |
| 30 |
0.709 |
0.057 |
0.0178 |
0.010 |
0.36 |
867.4 |
| 40 |
0.827 |
0.050 |
0.0131 |
0.034 |
0.5 |
993.9 |
| 50 |
0.945 |
0.042 |
0.0103 |
0.013 |
0.62 |
992 |
|
表 4 无人艇2.74 m重心位置半浸桨水动力特性计算(h/D=30%)
Tab.4 USV hydrodynamic characteristics (h/D=30%, LCG=2.74 m)
|
表 6(Tab. 6)
表 6 无人艇2.74 m重心位置半浸桨水动力特性计算(h/D=58%)
Tab. 6 USV hydrodynamic characteristics (h/D=58%, LCG=2.74 m)
| 半浸桨参数航速/kn |
$ J $
|
$ {K_T} $
|
$ {K_Q} $
|
$ {\raise0.7ex\hbox{${{K_Q}}$} \mathord{\left/ {\vphantom {{{K_Q}} {{J^5}}}}\right.} \lower0.7ex\hbox{${{J^5}}$}} $
|
$ \eta $
|
T/kg
|
| 20 |
0.882 |
0.134 |
0.052 |
0.098 |
0.36 |
585.4 |
| 30 |
0.992 |
0.109 |
0.037 |
0.038 |
0.47 |
849.3 |
| 40 |
1.058 |
0.073 |
0.022 |
0.017 |
0.56 |
885.4 |
| 50 |
1.181 |
0.057 |
0.018 |
0.008 |
0.6 |
867.3 |
|
表 6 无人艇2.74 m重心位置半浸桨水动力特性计算(h/D=58%)
Tab.6 USV hydrodynamic characteristics (h/D=58%, LCG=2.74 m)
|
2 半浸桨改进方法 从文献[5]可知半浸桨的通风条件和压力分布。空化效率对楔形面水动力特性的影响。但在不同的流速比下,这种现象也有不同的表现:在进速较低时时,吸入侧压力和水流量相对自由;进速较快时,吸入侧压力差较大,使空气充分吸入低压区。由此产生的空腔的最高点离吸入侧足够远,以平衡空腔内的压力和环境压力,水流的动态压力只作用于桨叶表面产生的气模上。在这种情况下压力很稳定,随着桨叶入水深度的增加,空腔与周围的空气断开。当空腔完全消失时,吸力面前部附近的气泡仍留在吸力面后部,发生部分气穴现象,叶片受到的合力大大减小。
通过将随边楔形面的水平角度改为60°,叶片进水时产生的空腔完全消失后,楔形面随之进入水中。60°角的楔形面可以带入一些空气,结合吸入侧残留的蒸汽泡来抵消冲击。在这种情况下,该区域的压力降低,叶片两侧的压力差增大,叶片的综合力也增大。
表 7(Tab. 7)
表 7 桨叶更改数据表
Tab. 7 Surface diercing propeller blades data
| 桨叶名称 |
直径/mm |
螺距/mm |
盘面比 |
螺距比 |
叶数 |
| SPP02 |
560 |
850 |
0.85 |
1.52 |
4 |
| 桨叶剖面 |
|
|
表 7 桨叶更改数据表
Tab.7 Surface diercing propeller blades data
|
对半浸桨的改进方法采用了Misra等相关文献图谱进行插值计算,对半浸桨叶随边楔形面角度进行更改,如图10和图12所示,计算结果如表8~表10所示。
表 8(Tab. 8)
表 8 半浸桨改进后水动力性能计算(h/D=30%)
Tab. 8 Hydrodynamic calculation of improved blades (h/D=30%)
| 半浸桨参数航速/kn |
$ J $
|
$ {K_T} $
|
$ {K_Q} $
|
$ {\raise0.7ex\hbox{${{K_Q}}$} \mathord{\left/ {\vphantom {{{K_Q}} {{J^5}}}}\right.} \lower0.7ex\hbox{${{J^5}}$}} $
|
$ \eta $
|
T/kg
|
| 20 |
0.683 |
0.081 |
0.031 |
0.45 |
0.28 |
587.5 |
| 30 |
0.854 |
0.065 |
0.021 |
0.01 |
0.42 |
685.5 |
| 40 |
1.068 |
0.066 |
0.02 |
0.01 |
0.54 |
793.2 |
| 50 |
1.22 |
0.056 |
0.017 |
0.009 |
0.64 |
805.8 |
|
表 8 半浸桨改进后水动力性能计算(h/D=30%)
Tab.8 Hydrodynamic calculation of improved blades (h/D=30%)
|
表 9(Tab. 9)
表 9 半浸桨改进后水动力性能计算(h/D=40%)
Tab. 9 Hydrodynamic calculation of improved blades (h/D=40%)
| 半浸桨参数航速/kn |
$ J $
|
$ {K_T} $
|
$ {K_Q} $
|
$ {\raise0.7ex\hbox{${{K_Q}}$} \mathord{\left/ {\vphantom {{{K_Q}} {{J^5}}}}\right.} \lower0.7ex\hbox{${{J^5}}$}} $
|
$ \eta $
|
T/kg
|
| 20 |
0.683 |
0.141 |
0.031 |
0.21 |
0.49 |
1028.2 |
| 30 |
0.854 |
0.09 |
0.021 |
0.04 |
0.58 |
946.6 |
| 40 |
1.068 |
0.076 |
0.02 |
0.01 |
0.62 |
910.7 |
| 50 |
1.22 |
0.059 |
0.017 |
0.006 |
0.67 |
843.5 |
|
表 9 半浸桨改进后水动力性能计算(h/D=40%)
Tab.9 Hydrodynamic calculation of improved blades (h/D=40%)
|
表 10(Tab. 10)
表 10 半浸桨改进后水动力性能计算(h/D=70%)
Tab. 10 Hydrodynamic calculation of improved blades (h/D=70%)
| 半浸桨参数航速/kn |
$ J $
|
$ {K_T} $
|
$ {K_Q} $
|
$ {\raise0.7ex\hbox{${{K_Q}}$} \mathord{\left/ {\vphantom {{{K_Q}} {{J^5}}}}\right.} \lower0.7ex\hbox{${{J^5}}$}} $
|
$ \eta $
|
T/kg
|
| 20 |
0.683 |
0.104 |
0.031 |
0.21 |
0.38 |
797.4 |
| 30 |
0.854 |
0.073 |
0.021 |
0.046 |
0.49 |
799.7 |
| 40 |
1.068 |
0.069 |
0.02 |
0.015 |
0.58 |
852 |
| 50 |
1.22 |
0.047 |
0.017 |
0.005 |
0.55 |
615.5 |
|
表 10 半浸桨改进后水动力性能计算(h/D=70%)
Tab.10 Hydrodynamic calculation of improved blades (h/D=70%)
|
可知,半浸桨叶随边楔形剖面角度更改后的推力值得到提高,半浸桨的推进效率也比之前的桨叶效率有所提高,无人艇的最终航速预报为52 kn。
3 实船试验结果分析 3.1 数据分析 通过对原始设计桨叶(SPP01)与随边楔形面角度更改后的桨叶(SPP01-1)水动力数据进行对比(见表11)可发现,更改后的桨叶理论计算数据结果较原始设计桨叶,在浸深比同为40%~47%左右的条件下,楔形面角度更改后的桨叶效率值及水平力系数值都有相应的提高。
表 11(Tab. 11)
表 11 10.3 m无人高速艇半浸桨水动力参数对比表
Tab. 11 Hydrodynamic data comparison for 10.3 m high speed boat SPP
|
$ \eta $
(SPP01)
|
$ {K_T} $
(SPP01)
|
$ \eta $
(SPP02)
|
$ {K_T} $
(SPP02)
|
| 20 kn |
0.46 |
0.118 |
0.49 |
0.141 |
| 30 kn |
0.55 |
0.01 |
0.58 |
0.09 |
| 40 kn |
0.61 |
0.076 |
0.62 |
0.076 |
| 50 kn |
0.64 |
0.056 |
0.67 |
0.059 |
|
表 11 10.3 m无人高速艇半浸桨水动力参数对比表
Tab.11 Hydrodynamic data comparison for 10.3 m high speed boat SPP
|
3.2 实船试验分析 根据上述计算结果,在桨叶的直径及螺距等相关尺寸保持不变的情况下,重新制作了一对随边楔形面角度进行更改后的桨叶SPP02,安装于实船后进行航行试验,其最高航速可达57 kn,稳定最高航速为55 kn。
为了验证半浸桨随边楔形面角度对效率和推力的影响大小,重新制作了一对直径为610 mm,螺距为860 mm,盘面比为0.86的螺旋桨SPP04,并对进行直径更改过的一对533 mm直径的螺旋桨叶SPP03随边位置楔形断面也按照60°夹角进行设计,安装到实船上进行了2轮试验。2轮试验当中,SPP03桨叶最高航速为52.2 kn,SPP04桨叶的最高航速为54.6 kn。
通过上述的数据对比分析和实船试验(见表12)发现,不管是对船体进行优化还是桨叶的直径进行优化,所达到的效果均没有优化桨叶随边楔形面角度的效果好。更改楔形面角度后,半浸桨的通气性能增加,随着航速的提高,通气性能对推力系数的影响小于对扭矩系数的影响,使通气半浸桨的效率大于不通气半浸桨效率,证明了楔形面角度可以改变半浸桨的通气性,对于提高高速艇的水动力性能和航速是有效的。
表 12(Tab. 12)
表 12 10.3 m无人高速艇半浸桨实船试验对比表
Tab. 12 10.3 m USV test comparison
桨叶名
项目
|
SPP 01 |
SPP 02 |
SPP 03 |
SPP 04 |
螺旋桨
尺寸/mm
|
D560
P850
|
D560
P850
|
D533
P850
|
D533/610
P850/860
|
主机转
速/r·min−1 |
3420 |
3550 |
3550 |
3550 |
最大航
速/kn
|
46 |
55 |
52.2 |
54.6 |
优化
内容
|
原始数据 |
楔形面角度由
0°改为60°
|
桨叶直径减小,
楔形面角度由0°
改为60°
|
桨叶直径增大,
楔形面角度为60°
|
|
表 12 10.3 m无人高速艇半浸桨实船试验对比表
Tab.12 10.3 m USV test comparison
|
4 结 语 本文采用数据对比分析和实船试验的方式进行验证。通过对半浸桨桨叶随边位置楔形面角度的设计更改、理论性能分析和最后的实船航行试验,探讨了通气性对半浸桨水动力特性的影响。结果表明楔形面呈一定角度的情况下可以有效提高桨叶的通气性能,最终通过实船航行试验验证了此结论的正确性。
半浸桨的通气性能决定了高速航行的效率,而半浸桨随边位置的楔形断面角度的大小是影响半浸桨通气性能的关键。在以往各种对半浸桨进行的研究,其设计基础均设立在常规母型桨和常用的Rose图谱上,均没有考虑到随边楔形面角度所带来的影响。本文以Misra等研究所得出的模型试验结果为理论基础,最终通过实船试验进行验证,为后续半浸桨桨叶的设计优化提供了一定的参考。
 2022, Vol. 44
2022, Vol. 44













