 2020, Vol. 63
2020, Vol. 63

2. 兰州大学地质科学与矿产资源学院, 兰州 730000;
3. 浙江大年科技有限公司, 宁波 315400;
4. 天津航海仪器研究所, 天津 300131;
5. 西南交通大学地球科学与环境工程学院, 成都 611756
 , MA GuoQing1, ZHOU WenNa2
, MA GuoQing1, ZHOU WenNa2 , YU Ping1, ZHOU Shuai1, WANG TaiHan1, TANG ShuiLiang3, DAI WeiMing3, MENG ZhaoHai4, ZHANG ZhiHou5
, YU Ping1, ZHOU Shuai1, WANG TaiHan1, TANG ShuiLiang3, DAI WeiMing3, MENG ZhaoHai4, ZHANG ZhiHou5
2. College of geological science and mineral resources, Lanzhou University, Lanzhou 730000, China;
3. Zhejiang Danian Technology Co., Ltd, Ningbo 315400, China;
4. Tianjin Navigation Instrument Research Institute, Tianjin 300131, China;
5. Faculty of Geosciences and Environmental Engineering, Southwest Jiaotong University, Chengdu 611756, China
磁法勘探是地球物理勘探中最为常用且有效的勘探方法之一,分为地面、航空、海洋、井中四种测量方式,其中航磁测量以其适用面积广、受地形影响小、效率高等优点得到快速发展,并成功应用到地质调查、资源勘探、水下磁性目标探测及辅助导航等领域(管志宁,1997).无人机航磁测量作为传统有人机航磁测量的补充(Funaki et al., 2014),以其体积小、成本低、人为干预少、无人员安全隐患等优势得到物探单位青睐,其中多旋翼无人机航磁测量是其中重要组成部分,适用于中小面积大比例尺航磁详查工作,可作为大型有人机航磁测量和地面磁法测量的补充(李志鹏等,2018;李添才等,2019).
无人机航磁数据包含由飞行平台产生的较大电磁干扰误差(Forrester et al., 2014)和受限于制作工艺导致三轴磁通门传感器存在的转向差(焦秉刚等,2011;周榕军等,2011).为获取准确地磁场信息,需要对干扰误差项进行补偿处理,按照补偿方式,航磁平台补偿可分为在飞行平台安装线圈用以抵消机动干扰的“硬补偿”和基于数学物理模型通过计算机算法实现的“软补偿”(何敬礼,1991;Zhang et al., 2011).硬补偿最初常用于大型有人机航磁系统中,但由于安装补偿线圈增加成本,而且会带来新的干扰(李晓禄和蔡文良,2006),所以目前国内外专家学者多是基于Tolles-Lawson模型开展无人机平台软补偿研究(Tolles and Lawson, 1950;王林飞等, 2013;骆遥等, 2015;胡浪, 2019).三轴磁通门转向差校正需要在屏蔽实验室进行标定,测试设备昂贵且流程复杂并且需要不定期进行标定测试(庞鸿锋等, 2011),这给实际生产过程带来诸多不便.
本文基于Tolles-Lawson模型建立飞行平台机动干扰补偿模型和转向差校正模型,根据模型结构相似性将二项补偿简化为野外一次性综合补偿,方法快速高效,方便实用,实测数据综合补偿后精度达到高精度磁测要求.为了验证综合补偿研究效果,在辽宁省兴城市夹山同一工区开展1:2000地面磁测和无人机航磁测量工作,综合补偿后的航磁数据有效去除了条带状干扰,使异常梯度带更加清晰.补偿后的航磁数据与地面磁测数据具有良好对应关系,验证了补偿效果,同时进一步证明了无人机航磁具有高效、准确、实用的优点.
1 多旋翼无人机航磁系统组成本次研究基于浙江大年科技有限公司自主研发的多旋翼无人机航磁系统(型号:MAG-DN20G4),该系统主要由电动四旋翼无人机飞行平台,三轴磁通门测量仪,毫米波雷达高度计三部分组成.为减少无人机平台对航磁传感器的干扰,无人机机体结构选用高强度碳纤维和铝制连接件等无磁或弱磁材料,航磁传感器安装位置尽量远离无人机机体,但综合考虑飞行安全和试验数据将航磁设备采用硬连接的方式固定在无人机机架下方,如图 1所示.

|
图 1 多旋翼无人机航磁系统 Fig. 1 Multi-rotor UAV aeromagnetic system |
多旋翼无人机航磁测量数据是地磁场和无人机载体干扰场及仪器误差叠加在一起的综合场(王婕等, 2016),无人机载体干扰场主要由载体机电设备产生的高频电磁场和载体运动状态下产生的机动相关的干扰场组成,此外受制作工艺限制,三轴磁通门传感器本身存在转向差误差,为获得准确的地磁场信息,必须对三轴传感器误差和载体干扰进行分析、补偿.
2.1 机电设备干扰多旋翼无人机航磁系统机电设备主要包括无人机平台通讯天线、数传、GPS、毫米波雷达等,这些设备工作时不断接收和发射电磁波信号对航磁传感器测量数据产生干扰误差.为分析系统机电设备对传感器的干扰影响的大小及特点,选取地势平坦,磁场平稳,干扰较小试验场地进行航磁系统静态测试并对测试数据进行频谱分析研究机电干扰特性(如图 2).

|
图 2 静态测试数据及频谱分析 (a)、(b)单独传感器静态测试;(c)、(d)系统断电静态测试;(e)、(f)系统通电静态测试. Fig. 2 Static test data and spectrum analysis (a), (b) Static test of single sensor; (c), (d) Static test of system with power off; (e), (f) Static test of system with power on. |
对比表 1航磁系统静态测试数据,系统机电设备产生的主要干扰来源于系统通讯天线、GPS天线、数传、雷达高度计等机电设备工作时产生5 Hz、10、25、50、75 Hz的个频电磁干扰场.相对于低频目标地磁场,航磁系统机电设备干扰属于高频干扰场,可通过以下方式进行改善:(1)增大传感器与机电设备间距离,但会降低无人机的抗风能力,对系统安全带来隐患;(2)对机电设备进行电磁屏蔽,但会增加生产成本,增加无人机机体重量,减少航时,降低作业效率;(3)设计合理的滤波器进行滤波处理.本文根据机电干扰分析结果设计截止频率为5 Hz的Butterworth低通滤波器进行误差处理.
|
|
表 1 航磁系统静态测试数据 Table 1 Static test data of aeromagnetic system |
多旋翼无人机航磁作业中,由于机体运动产生的干扰称为机动干扰场,主要包括固定干扰场,感应干扰场和涡流干扰场(刘德华,2019).机动干扰场影响大且频带与地磁场频率相近,所以很难通过滤波进行处理,必须研究针对这部分干扰的补偿技术.
本文基于Tolles-Lawson模型建立T-L坐标系如图 3所示,X、Y、Z为空间坐标轴,无人机沿Y轴方向飞行,横轴为X轴方向,Z轴垂直XOY平面向下,Bg表示传感器所在位置的地磁场,x、y、z是地磁场Bg与坐标轴的夹角,Bd是误差干扰场,B是地磁场与误差场综合场,在此基础上建立机动干扰场的特征模型:

|
图 3 Tolles-Lawson模型坐标系 Fig. 3 The coordinate system of Tolles-Lawson model |
(1) 固定干扰场:航磁系统中一些硬磁材料长期在外界磁场作用下,形成跟地磁场一定关系的固定干扰场,短时间内稳定不变,用Bf表示:

|
(1) |
其中Bfx,Bfy,Bfz表示固定干扰场Bf在T-L坐标系下投影三分量.
(2) 感应干扰场:无人机软磁材料在外界地磁场作用下形成大小和方向与外磁场相关的感应干扰场,随姿态变化而发生变化,用Bi表示:

|
(2) |
其中,aij为感应干扰场的感应系数,该系数与易感软磁材料属性及与传感器的空间位置有关,[Bgx Bgy Bgz]T为地磁场Bg在载体坐标系下的投影分量.
(3) 涡流干扰场:无人机飞行过程中,机体上构成闭合环路导体材料做切割地磁场产生涡流干扰磁场,干扰场的大小与无人机上构成闭合导体材料切割磁力线的速率有关,模型中表现为与地磁场在无人机载体坐标系下分量的变化率成正比,用Be表示:
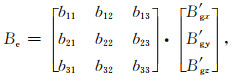
|
(3) |
其中,bij为涡流干扰场系数,该系数与导体属性及与传感器的空间位置有关,[B′gx B′gy B′gz]T表示无人机载体坐标系下地磁场投影分量的变化率.
2.3 航磁传感器误差受生产工艺限制,磁通门磁力仪存在三轴不能严格垂直正交(图 4),传感器灵敏度、零偏不一致的误差,测量中表现为存在空间转向误差.转向差不可避免且会对测量过程带来误差,需要进行标定测试获取传感器三轴间实际夹角,灵敏系数零偏置量,测试设备昂贵,流程繁琐,并且随着使用频次不同需要进行不定期标定.

|
图 4 三轴正交坐标系 Fig. 4 Three axis orthogonal coordinate system |
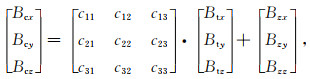
本文建立转向差误差校正模型如下:

|
(4) |

|
(5) |
|
(6) |
其中,cij为转向误差中的刻度因子误差和非正交误差综合误差系数,Bzx,Bzy,Bzz分别是传感器三轴零偏误差,[Btx Bty Btz]T表示理想传感器三分量真实值,[Bcx Bcy Bcz]T表示三轴传感器测量输出值.
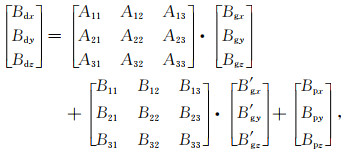
3 综合误差补偿由式(1)—(6)可以看出,机动干扰补偿模型和三轴校正模型都是线性补偿模型,可将两者简化合并作为整体模型进行综合补偿,本文将建立综合误差补偿模型.

|
(7) |
整理得:

|
(8) |
|
(9) |
其中:
|
(10) |
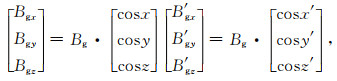
式中Bd表示测量误差,A,B,Bp为新模型的误差参数,[Bgx Bgy Bgz]T是地磁场在机载坐标系下的分量投影,x、y、z为地磁场与无人机载体坐标系各坐标轴的夹角.
由于误差值相对于地磁场值很小,传感器测量总量与地磁场夹角很小,所以误差总量ΔB可以表示为误差场与地磁场单位向量的乘积.

|
(11) |
由于cosx2+cosy2+cosz2=1,cosx′cosx+cosy′cosy+cosz′cosz=0,可以消除cosz2,cosz′cosz两项,可简化为令A33、B33为0,同时令Aij=Aji,可将上式简化为

|
(12) |
其中:C=[Bg·A11, Bg·A12, Bg·A13, Bg·A22, Bg·A23, Bg·B11, Bg·B12, Bg·B13, Bg·B21, Bg·B22, Bg·B23, Bg·B31, Bg·B32, Bpx, Bpy, Bpz], T=[cosx2, cosxcosy, cosxcosz, cosy2, cosycosz, cosx′cosx, cosy′cosx,cosz′cosx, cosx′cosy, cosy′cosy, cosz′cosy, cosx′cosz, cosy′cosz, cosx, cosy, cosz].
式中cosx, cosy, cosz使用三轴传感器分量与总量计算求得,再通过使用最小二乘法求解超定线性方程组得到16个综合误差补偿参数,进行航磁数据综合补偿处理(如表 2所示).
|
|
表 2 综合补偿参数 Table 2 Comprehensive compensation parameters |
无人机航磁补偿测量参考有人机四方位飞行补偿测量,选取磁场平稳区域进行补偿测量,无人机航磁系统在离地100 m高空分别沿90°、0°、270°和180°航向上依次做侧滚、俯仰和侧滑三组动作,根据公式(12)求取综合补偿参数详见表 3,使用综合补偿参数进行补偿处理,补偿前后的数据如图 5所示,蓝色为补偿前测量值,红色为补偿后值.其精度按照软补偿评价指标计算方法进行评估,补偿之后的标准差为0.682 nT.
|
|
表 3 四方位测试补偿参数 Table 3 Compensation parameters of four-directional test |

|
图 5 航磁四方位补偿测试 Fig. 5 Aeromagnetic four-directional compensation test |
为验证补偿效果,在姿态补偿校准附近地势平坦、磁场平稳区域进行米字交叉点飞行测试,高度20 m,航速6 m·s-1,采样率200 Hz,如图 6所示.

|
图 6 无人机飞行轨迹 Fig. 6 UAV flight path |
使用工区四方位补偿参数(表 3)对米字测线数据进行综合补偿,以图 6米字测线交点位置为圆心半径为5 m的范围截取数据,计算4条测线圆内补偿前后平均值计为测量值和补偿值,并计算每条测线补偿值与补偿值均值的差值,如表 4所示.补偿前不同方向最大差值73.14 nT(测线3和测线4),补偿后最大差值2.41 nT(测线1和测线3),不同方向补偿后数据与均值差值最大1.22 nT(测线1),验证综合补偿的可靠性.
|
|
表 4 交叉点航磁数据 Table 4 Aeromagnetic survey data at intersection |
辽宁省兴城地区位于华北地台北部,燕山褶皱带,区内断裂沿着平行块体边界发育,形成若干长条延伸断块,隆起和凹陷带沿北东向相间排列.兴城地区早期构造强烈,结晶基底由变质岩系构成,太古界地层存在大面积混合花岗岩,中古生界地层为海相陆源碎屑岩和内源碳酸岩建造,下部长城系由砾岩石英砂岩页岩和灰岩组成,如图 7所示.

|
图 7 兴城市夹山地区地质图 Fig. 7 Geological map of Jiashan area in Xingcheng city |
为了测试综合补偿研究效果,验证无人机航磁数据的准确性,在兴城夹山地区开展1:2000无人机航磁测量工作(图 7红色五角星表示工区位置),本次航磁测量采用平飞模式,平均海拔高度155 m,线距20 m.对航磁数据进行综合补偿处理,并与地面磁测数据进行对比,结果如图 8所示.

|
图 8 兴城夹山1:2000磁异常图 (a)原始航磁异常图;(b)补偿后航磁异常图;(c)地磁异常图;(d)地磁上延50 m异常图. Fig. 8 1:2000 magnetic anomaly map of Jiashan area in Xingcheng city (a) Original aeromagnetic anomaly map; (b) Aeromagnetic anomaly map after compensation; (c) Ground magnetic anomaly map; (d) Anomaly map of ground magnetic data with upward continuation of 50 m. |
图 8a为原始航磁数据异常,由于受飞行平台干扰和传感器转向差影响,航磁异常有明显沿测线方向的条带状干扰(图 8a红色箭头指示飞行测线方向), 工区中部异常梯度带模糊.利用本文研究方法进行综合补偿处理,获得8b所示异常图,可以看出,综合补偿处理有效去除了传感器转向差和机动干扰引起的沿测线方向的条带状异常,磁异常梯度带更加清晰.
通过对比图 8b补偿后航磁异常、图 8c地面磁测异常及图 8d地磁向上延拓异常验证航磁良好的应用效果:三者异常形态具有良好的对应关系,均表现为测区中部呈现北北西向高磁异常,两侧逐渐减弱.航磁异常与地磁向上延拓异常均未显示出测区东部条带状高磁异常,推测该处高磁异常可能是由浅部高磁异常体引起;地磁上延异常在工区北部并未出现与地磁和航磁类似的高值异常,是由于向上延拓算法具有一定局限性,需要利用测点周围数据进行计算,对于周围均为低值的局部高值异常会造成异常信息削弱现象,而航磁实测数据能够很好反映了该处高磁异常.
6 结论(1) 多旋翼无人机航磁系统误差主要包括无人机平台机电设备干扰,无人机飞行过程产生机动干扰误差(固定干扰场、感应干扰场、涡流干扰场)及三轴磁通门转向差(刻度因子误差、不正交误差、零偏误差).
(2) 通过航磁系统野外静态测试数据及频谱分析得出:机电设备干扰主要来源于无人机载体机电设备工作时产生的5、10、25、75 Hz个频干扰.相较于目标信号低频特性,机电干扰属于高频干扰,本文通过设计5 Hz Butterworth低通滤波器进行处理.
(3) 本文基于Tolles-Lawson模型建立无人机航磁机动干扰误差补偿模型和转向差校正模型,根据模型结构相似性特点合并建立综合误差补偿模型,实测数据进行综合补偿后的精度达到高精度磁测要求.
(4) 本文将综合补偿研究应用到辽宁省兴城市夹山地区1:2000航磁数据,并与地面磁测数据及上延数据进行对比分析:综合补偿处理可以有效去除载体干扰和仪器转向差引起的条带状干扰,获得准确航磁数据.航磁异常与地面磁测异常具有良好的对应关系,进而验证了研究的有效性和实用性.
致谢 感谢导师黄大年教授生前对我学习和生活上的帮助,科研方向的指引及专业兴趣的培养.感谢吉林大学兴城实习基地和浙江大年科技有限公司为本文研究提供数据支持.
Forrester R, Huq M S, Ahmadi M, et al. 2014. Magnetic signature attenuation of an unmanned aircraft system for aeromagnetic survey. IEEE/ASME Transactions on Mechatronics, 19(4): 1436-1446. |
Funaki M, Higashino S I, Sakanaka S, et al. 2014. Small unmanned aerial vehicles for aeromagnetic surveys and their flights in the South Shetland Islands, Antarctica. Polar Science, 8(4): 342-356. DOI:10.1016/j.polar.2014.07.001 |
Guan Z N. 1997. Researches and progresses of magnetic prospecting in China. Acta Geophysica Sinica (in Chinese), 40(S1): 299-307. |
He J L. 1991. History, present and trends of airborne magnetic compensation and compensator. Equipment for Geotechnical Engineering, (3): 1-7. |
Hu L. 2019. Research on geomagnetic vector measurement error compensation algorithm in aeromagnetic geomagnetic detection[Master's thesis] (in Chinese). Wuhan: Huazhong University of Science & Technology.
|
Jiao B G, Gu W, Zhang S Y. 2011. Error calibration of three-component fluxgate sensor's nonorthogonality. Modern Electronics Technique (in Chinese), 34(13): 123-126. |
Li T C, Meng L, Jiao J, et al. 2019. Study on application of aeromagnetic detection system integration based on UAV platform. Subgrade Engineering (in Chinese), (5): 137-140. |
Li X L, Cai W L. 2006. The assembly and compensation of the aeromagnetic gradiometic system on the Y-5 aircraft. Geophysical and Geochemical Exploration (in Chinese), 30(3): 224-228, 232. |
Li Z P, Gao S, Wang X B. 2018. New method of aeromagnetic surveys with rotorcraft UAV in particular areas. Chinese Journal of Geophysics (in Chinese), 61(9): 3825-3834. DOI:10.6038/cjg2018L0588 |
Liu D H. 2019. Research on magnetic interference compensation algorithm for aeromagnetic measurement platform[Master's thesis] (in Chinese). Chengdu: University of Electronic Science and Technology of China.
|
Luo Y, Luo F, Wang M, et al. 2015. Removing the earth's main field in processing of airborne magnetic data. Computing Techniques for Geophysical and Geochemical Exploration (in Chinese), 37(5): 552-559. |
Pang H F, Luo S T, Chen D X, et al. 2011. Error calibration of fluxgate magnetometers in arbitrary attitude situation. Journal of Test and Measurement Technology (in Chinese), 25(4): 371-375. |
Tolles W E, Lawson J D. 1950. Magnetic Compensation of MAD Equipped Aircraft. Mineola, NY: Airborne Instruments Lab Inc.
|
Wang J, Guo Z Q, Liu J Y. 2016. Analysis on magnetic compensation model of fixed-wing UAV aeromagnetic detection system. Acta Aeronautica et Astronautica Sinica (in Chinese), 37(11): 3435-3443. |
Wang L F, Xue D J, Xiong S Q, et al. 2013. The method of quality assessment for digital magnetic compensation and software realization. Geophysical and Geochemical Exploration (in Chinese), 37(6): 1027-1030. |
Zhang B G, Guo Z Q, Qiao Y C. 2011. A simplified aeromagnetic compensation model for low magnetism UAV platform. 2011 IEEE International Geoscience and Remote Sensing Symposium. Vancouver, BC, Canada: IEEE: 3401-3404.
|
Zhou R J, Liu D M, Hong Z H, et al. 2011. An error correction method to nonideal triaxial fluxgate magnetometers. Ship Science and Technology (in Chinese), 33(3): 85-89. |
管志宁. 1997. 我国磁法勘探的研究与进展. 地球物理学报, 40(S1): 299-307. |
何敬礼. 1991. 飞机磁补偿磁补偿器的历史现状及发展趋势. 地学仪器, (3): 1-7. |
胡浪. 2019.航空地磁探测中地磁矢量测量误差补偿算法研究[硕士论文].武汉: 华中科技大学.
|
焦秉刚, 顾伟, 张松勇. 2011. 三分量磁通门传感器非正交性误差校正. 现代电子技术, 34(13): 123-126. |
李添才, 孟亮, 焦健, 等. 2019. 基于无人机平台的航磁探测系统集成应用研究. 路基工程, (5): 137-140. |
李晓禄, 蔡文良. 2006. 运五飞机上航磁梯度测量系统的安装与补偿. 物探与化探, 30(3): 224-228, 232. |
李志鹏, 高嵩, 王绪本. 2018. 特殊区域旋翼无人机航磁测量研究. 地球物理学报, 61(9): 3825-3834. DOI:10.6038/cjg2018L0588 |
刘德华. 2019.航磁测量平台磁干扰补偿算法研究[硕士论文].成都: 电子科技大学.
|
骆遥, 罗锋, 王明, 等. 2015. 航空磁测中正常地磁场校正. 物探化探计算技术, 37(5): 552-559. |
庞鸿锋, 罗诗途, 陈棣湘, 等. 2011. 任意姿态变化下的磁通门传感器误差校正. 测试技术学报, 25(4): 371-375. |
王婕, 郭子祺, 刘建英. 2016. 固定翼无人机航磁探测系统的磁补偿模型分析. 航空学报, 37(11): 3435-3443. |
王林飞, 薛典军, 熊盛青, 等. 2013. 航磁软补偿质量评价方法及软件实现. 物探与化探, 37(6): 1027-1030. |
周榕军, 刘大明, 洪泽宏, 等. 2011. 非理想条件下三轴磁通门传感器误差修正方法. 舰船科学技术, 33(3): 85-89. |