 2020, Vol. 63
2020, Vol. 63



2. 地球信息探测仪器教育部重点实验室, 长春 130026
2. Key Laboratory of Geo-Exploration and Instrumentation, Ministry of Education, Changchun 130026, China
磁共振测深(Magnetic Resonance Sounding,缩写为MRS)方法,由于其具有对游离氢质子的固有敏感性,能够直接探测地下水(Legchenko et al., 2002).MRS方法的深度探测能力主要受其激发线圈的尺寸、激发脉冲矩、介质的电导率、环境的噪声水平以及地球磁场值的限制,其信号幅度反映了游离水的含量.MRS反演结果通常表示为含水量随探测深度的分布情况(Vouillamoz et al., 2008).目前,地面磁共振探测在仪器系统检测技术和数据反演方法方面都趋于成熟,并且被广泛地应用到地下水探测中(Chalikakis et al., 2008).随着研究领域的扩展,人们尝试将MRS方法应用到地下工程勘探.
利用地下磁共振测深(Underground Magnetic Resonance Sounding,UMRS)方法能够直观获取施工隧道前方地质体的含水情况.然而,地下工程施工环境复杂,隧道空间狭窄,探测线圈尺寸受到严重限制,且空腔周围的异常水体影响不可忽略,因此不能直接将地面磁共振方法引入隧道探测中,需要对探测技术以及数据处理方法开展进一步研究.山东大学孙怀凤等(2013)模拟了隧道UMRS模型的全空间响应,验证了利用磁共振测深进行隧道超前地质预报的可行性;与此同时,吉林大学磁共振技术研究组在隧道磁共振理论方法和仪器关键技术等方面均取得了突破性进展(林君等, 2013, 2017;林婷婷等,2013),并通过现场探测,证明了利用UMRS技术可以直接探测施工隧道前方的含水信息(Lin et al., 2018a);Costabel等(2017)评估了移动式磁共振测深仪器在隧道和矿井探测中的应用前景,并分析了实验室获取的隧道磁共振信号特征及弛豫时间分布;长安大学李貅团队利用有限元方法模拟了UMRS信号响应,基于不等式约束和考虑罚项的最小二乘目标函数,实现了隧道磁共振全弛豫信号的三维反演(赵威等,2018);Qin等(2018)从大型隧道模拟实验装置中探测到了磁共振信号并给出了可靠的反演结果.
目前,MRS数据的反演方法有以下几种:初始振幅反演(Initial Value Inversion,IVI),基于不同脉冲矩序列下磁共振信号的初始幅值,反演得到含水体参数(Legchenko and Shushakov, 1998);时间分步反演(Time Step Inversion,TSI),通过建立不同时间下部分含水量与其赋存位置间的关系,获取含水体和弛豫时间参数(Legchenko and Valla, 2002);QT反演,有效利用MRS全数据集进行反演,实现了单指数和多指数弛豫时间以及含水体的准确评估(Müller-Petke and Yaramanci, 2010;Behroozmand et al., 2012).此外,为提高MRS数据反演的可靠性,与其他电磁法进行联合探测也是一种在国际上被广泛认可的方案(Braun and Yaramanci, 2003;万玲等,2013;Metwaly et al., 2014).然而,对于隧道磁共振探测数据,无论采用何种反演方法,其解释结果中各项参数的确定性都是一个值得深入研究的课题.
Auken等人在研究层状大地横向约束二维电阻率反演方法时,首次提出标准偏差因子的概念(Auken and Christiansen, 2004).随后,Behroozmand等(2013)针对地面磁共振与瞬变电磁联合探测数据,考查了反演参数确定性的影响因素.此外,Müller-Petke和Yaramanci(2006)详细分析了三种不同线圈铺设方式(重叠,半覆盖和边对边)对地面磁共振核函数以及分辨率分布的影响.然而,在以往的隧道磁共振测深研究成果中,对模型参数的不确定性评价却少有研究.林君团队(2018)在进行隧道UMRS准全空间理论建模时,从核函数的角度出发分析了电阻率、隧道尺寸、以及线圈偏转角度等参数对核函数分布的影响(Lin et al., 2016);在研究地下超前探测磁共振响应特征时,从仪器接收灵敏度的角度出发明确了不同激发脉冲矩、线圈匝数、以及噪声水平等参数影响下的最大超前探测距离(检测信号灵敏度为5 nV时,最大超前探测距离为30 m).
本文在以往研究基础上,从误差估计的角度出发,基于UMRS模型协方差矩阵,计算标准偏差因子,探究了隧道环境中模型参数的不确定度.通过划分参数的不确定度等级,直观地讨论了电阻率、含水量、水体厚度、发射线圈边长、匝数、线圈旋转角度以及噪声水平等参数对目标含水体测定的影响.最后,总结了隧道UMRS探测模型参数不确定度的一般性结论.
1 隧道磁共振矩形线圈激发场计算 1.1 水平电偶极子在层状导电介质中产生的磁场在地下隧道全空间内建立直角坐标系,在层状模型中将激发源置于i=0层,记隧道掘进前方为“+”方向,后方为“-”方向.根据电磁场基本理论,地磁场强度与矢量势A有如下关系(Xiong,1989):

|
(1) |
与地面磁共振测深线圈铺设方式不同,隧道中的线圈需要直立放置,其法线方向为x方向,因此,沿着z方向的单位电流水平电偶极子的矢量势为

|
(2) |

|
(3) |

|
(4) |
|
(5) |
式中

以i=0作为初始激发项,且

|
(6) |

|
(7) |
其中,

|
(8) |

|
(9) |
其中,
从而磁场强度H在直角坐标系上的三分量分别为

|
(10) |
|
(11) |

|
(12) |
其中径向坐标
以长导线中心为坐标原点,导线长度为l,沿直角坐标系z方向放置,对式(10)、(11)、(12)在z轴方向积分得

|
(13) |
|
(14) |

|
(15) |
其中,

在推导矩形线圈激发磁场表达式时,将其看作四段有限长导线源.以线圈中心O为原点建立坐标系,由于坐标系原点位置发生改变,因此需要进行坐标转换.如图 1所示,将四边长均为l的矩形线圈与yz面平行放置,并通入顺时针方向的交变电流,则x坐标不发生改变.假设线圈边上某点坐标为(xi, yi, zi),则导线L1、L2、L3和L4相对于线圈的坐标分别转换为(xi, -zi-l/2, yi),(xi, yi-l/2, zi),(xi, zi-l/2, -yi),(xi, -yi-l/2, -zi).

|
图 1 矩形线圈模型空间坐标及磁场分量示意图 Fig. 1 Spatial coordinate and magnetic field component diagram of the rectangular coil model |
由于坐标的转换,矩形线圈激发的总磁场方向相对于每段导线也发生了旋转,具体方向示意如图 1所示,用Bxi, Byi, Bzi分别表示导线Li的原始磁场,其中i=1, 2, 3, 4,原始磁场的z分量与电流方向一致.旋转后的总磁场按照如下公式计算:

|
(16) |

|
(17) |

|
(18) |
则矩形线圈的激发场在坐标系xyz下可表示为

|
(19) |
磁共振测深方法在隧道中的应用以全空间模型为基础,在考虑了已挖空区域的情况,隧道超前探测的磁共振响应是准全空间含水体的综合响应.准全空间模型的磁共振响应及核函数如下所示:

|
(20) |
|
(21) |
|
(22) |
其中E0是磁共振信号的初始振幅;d表示探测距离;K(q, x)为核函数;w(x)是含水量(0 < w(x) < 1);L是隧道掌子面宽度;ωL是拉莫尔频率;M0是氢质子磁化强度;γp是旋磁比;q=I0·t是激发脉冲矩,I0是电流脉冲强度幅值,t是激发时间;BT+和BR-为发射和接收场垂直分量B⊥的顺时针和逆时针旋转分量,B⊥=BT++BT-,对于收发共线线圈有BT+=BT-;ζT/R是椭圆极化场相位参数.
在隧道磁共振探测过程中,激发场垂直分量B⊥与地磁偏角D和地磁倾角I有关,同时也与线圈的法向偏角α和倾角β有关(林君等,2018).

|
(23) |
其中,
|
(24) |
|
(25) |
由此,旋转后的激发场垂直分量为:

|
(26) |
基于以上理论,建立隧道准全空间磁共振仿真模型:拉莫尔频率为2330 Hz,地磁倾角I为60°,地磁偏角D为11°;线圈直立放置于掌子面,发射和接收采用同一线圈(边长为6 m,匝数为20),其旋转角度α和β均为0°;假设含水模型为层状分布,已开挖层从-30 m到掌子面(0 m),含水量为0.01 %,掘进前方第一层从掌子面到探测前方5 m,含水量为1%,第二层为5~25 m,含水量为30%,第三层为25~30 m,含水量为1%;各层电阻率均为100 Ωm.计算得到的准全空间核函数和响应信号结果分别如图 2和图 3所示,由于隧道已挖空区域的存在,导致掌子面后方-30 m~0 m区域内的核函数明显小于探测前方0~30 m区域内的核函数,图 3的信号是掌子面前方和后方各层含水体的综合响应.

|
图 2 隧道磁共振模型核函数仿真结果 Fig. 2 Simulation of the kernel for UMRS model |

|
图 3 隧道磁共振模型响应信号仿真结果 Fig. 3 Simulation of the signal for UMRS model |
隧道磁共振测深观测数据dobs与模型参数m之间可描述为非线性可微关系,一般采取对数据方程进行一阶泰勒展开的线性化逼近:

|
(27) |

|
(28) |

|
(29) |
其中,dobs是观测数据;F是正演响应函数;m0是初始模型参数;m是反演模型参数;G是雅克比矩阵;eobs是观测误差.
模型参数不确定度的计算是基于正演响应的线性化近似.误差通过测量数据的标准偏差引入,从而参数的不确定度可通过模型的协方差矩阵来进行估计(Tarantola and Valette, 1982;Auken and Christiansen, 2004).

|
(30) |
其中,Cest是模型的协方差矩阵;Cobs是观测数据的协方差,可由下式得到,

|
(31) |
含水量及其所处位置是隧道磁共振反演的主要结果,存在于不同位置的含水体参数,其标准偏差因子STDF(w)可由协方差矩阵对角元素的平方根得到,

|
(32) |
在对数正态分布假设下,反演模型中的含水体参数落入公式(33)所示区间的概率为68.27%;落入公式(34)所示区间的概率为95.45%;落入公式(35)所示区间的概率为99.73%.

|
(33) |

|
(34) |
|
(35) |
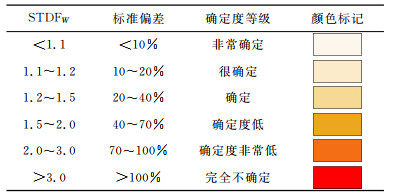
由于磁共振参数标准偏差因子的计算是基于正演的线性化逼近,因此,对参数不确定度的分析必须是定性而非定量地考虑.根据误差估计可以知道,标准偏差因子STDFW越接近1表示含水体参数的误差越小,也就是不确定度越低;STDFW越大表明含水体误差越大,即不确定度越高.本文将隧道含水体参数的不确定度划分为6个等级,对应的误差及颜色标记如表 1所示.
|
|
表 1 参数不确定度等级划分表 Table 1 Parameter uncertainty levels |
为了使得本文的参数不确定度分析符合实际意义,在正演信号中加入仿真噪声来模拟隧道实际探测条件.本文数据模拟过程中加入标准偏差为16 nV的高斯噪声,并且叠加了3%的正演数值作为均匀噪声.
4 仿真案例分析隧道磁共振测深超前探测模拟观测数据采用如下条件获得:拉莫尔频率为2330 Hz;地磁倾角为60°,地磁偏角为11°;采用收发共线模式,方形线圈直立放置(α=0°,β=0°)于掌子面,边长为6 m,匝数为20;隧道掌子面宽度为10 m;激发脉冲矩为0.1~4 As.对于所有仿真案例的分析,除了所分析的参数外,其余参数均与基本模型保持一致.
隧道磁共振探测基本模型示意如图 4所示:探测线圈-30~0 m为已开挖层,其含水量W0为0.01%,电阻率R0为1000 Ωm;掘进前方设置三层,含水量W1、W2、W3均为30%,电阻率R1、R2、R3均为100 Ωm,将掘进前方第二层作为目标层,其厚度H2为4 m,考查其所处位置扫描范围为2~30 m内的含水体反演不确定度情况.通过改变单一参数(电阻率、含水量、含水层厚度、发射线圈边长、匝数、线圈旋转角度,以及噪声水平)来进行多次仿真,分析目标层含水体标准偏差因子STDFW2的变化情况.各层详细参数设置如表 2所示.

|
图 4 隧道磁共振探测基本模型示意图 Fig. 4 Diagram of tunnel UMRS detection model |
|
|
表 2 隧道基本模型参数设置表 Table 2 Model parameters details in tunnel |
首先分析电阻率的影响,设置两组模型,分别改变掘进前方第一层和第二层的电阻率值,其余参数按照表 2设置,观察目标层含水体的不确定度变化.
在第一组模型中,将掘进前方第一层电阻率R1作为变量参数,设置R1=[1,10,50,100,500,1000,5000]Ωm,模型如图 5a所示.计算的STDFw2结果如图 6a所示,当R1从1 Ωm变化到10 Ωm,STDFW2有明显降低,且随着R1的增加,目标层含水体的探测距离分辨率增大,形成倾斜特征.具体表现为:W2的“非常确定”(STDFW2 < 1.1)探测距离由11 m增大至13 m;“完全不确定”(STDFW2>3)探测距离由16 m增大至24 m.当R1大于10 Ωm后,STDFW2没有明显变动.具体表现为:W2的“非常确定”探测距离保持在13 m不变,在26 m以下的含水体参数是完全不确定的.说明在隧道环境中,掘进前方第一层电阻率在低阻范围内(1~10 Ωm)的增大,能够有效改善UMRS探测目标层含水体的探测距离分辨率.

|
图 5 电阻率变化模型. (a)掘进前方第一层电阻率变化模型;(b)目标层电阻率变化模型 Fig. 5 Resistivity model. (a) The first layer resistivity change model; (b) The target layer resistivity change model |
第二组模型如图 5b所示.设置目标层电阻率R2=[1,10,50,100,500,1000,5000] Ωm.计算结果如图 6b所示,当R2从1 Ωm增加到5000 Ωm时,STDFW2没有明显变动.具体表现为:W2的“非常确定”探测距离保持在13 m左右,且26 m以外的W2是完全不确定的.说明在隧道环境中,目标层含水体的不确定度几乎不受该层电阻率的变化而影响.

|
图 6 电阻率变化对目标层含水体不确定度的影响. (a)掘进前方第一层电阻率变化的影响;(b)目标层电阻率变化的影响 Fig. 6 Effect of resistivity on the uncertainty of water body in target layer. (a) Effect of resistivity in first layer on STDFW2; (b) Effect of resistivity in target layer on STDFW2 |
地层导电性作为磁共振核函数计算的重要参数,尤其当介质电阻率小于100 Ωm时,其对地面磁共振测深数据反演结果的准确性产生重要影响(Shushakov,1996;翁爱华等,2007).而在隧道磁共振探测过程中,正如以上两组分析,对于探测目标含水体前方介质的电阻率大于10 Ωm的情况,电阻率值对目标含水体不确定度及其探测距离分辨率的影响几乎可以忽略;对于电阻率小于10 Ωm的实际情况,其变化对提高探测模型参数的确定度有着不可忽视的作用.因此,可以考虑借助瞬变电磁法等适用于隧道环境勘探的技术手段获取准确的电阻率参数,将其作为反演的先验信息(李貅等,2015).
4.2 含水情况对STDFW2的影响分析地层的含水情况包括含水量以及含水层厚度的大小.本小节设置三组模型,在前两组模型中,分别将掘进前方第一层和第二层的含水量W1和W2作为变量参数,等间隔分布于1%~100%之间.图 7a是W1的变化模型,已开挖层含水量为0.01%,目标层和掘进前方第三层含水量均为30%;目标含水体厚度为4 m,其观测距离在2~30 m之间;已开挖层电阻率为1000 Ωm,其余各层介质的电阻率均为100 Ωm.计算的STDFW2结果如图 8a所示,STDFW2随含水量W1的增加而增大.具体表现为:当W1从1%增大到100%时,W2的“非常确定”探测距离由15 m缩短至11 m;“完全不确定”距离由30 m缩短至21 m.结果证明,目标前方地层含水量越高,目标层含水体的不确定度越大.

|
图 7 含水量变化模型. (a)掘进前方第一层含水量变化模型;(b)目标层含水量变化模型 Fig. 7 Water content model. (a) The first layer water content change model; (b) The target layer water content change model |
图 7b是W2的变化模型,W2分布在1%~100%之间,厚度为4 m,其观测距离在2~30 m之间;已开挖层的含水量为0.01%,掘进前方第一层和第三层含水量均为30%;其余参数同基本模型参数一致.计算结果如图 8b所示,当W2从1%增大到100%时,目标层含水体的探测距离分辨率保持为平台趋势.具体表现为:W2参数的“非常确定”探测距离保持在13 m,“完全不确定”距离在26 m左右,变化不明显.这表明,目标层含水量的改变不影响其自身的不确定度.

|
图 8 含水情况变化对目标层含水体不确定度的影响. (a)掘进前方第一层含水量变化的影响;(b)目标层含水量变化的影响;(c)目标层厚度变化的影响 Fig. 8 Effect of water content on the determination of water body in target layer. (a) Effect of water content in first layer on STDFW2; (b) Effect of water content in target layer on STDFW2; (c) Effect of water thickness in target layer on STDFW2. |
在地面磁共振参数不确定度分析中,无论是顶层还是目标层的含水量值对目标含水体的不确定度均不产生影响(Behroozmand et al., 2013).然而,在隧道准全空间探测模型中,UMRS信号相对地面磁共振信号更加微弱,若探测目标体前方存在含水量较大的含水体,由于其会引起探测信号振荡幅度变化剧烈,从而导致目标体的探测灵敏度下降.
设置第三组模型,分析目标含水层厚度H2对W2不确定度的影响,分别设计厚度为1~10 m的目标含水体,其观测距离在2~30 m之间;电阻率、含水体及其他关键参数均按照表 2的基本模型设置.STDFW2的计算结果如图 8c所示,随着目标含水层厚度从1 m增加至10 m,其含水体参数W2的“非常确定”探测距离由10 m增大至15 m;“完全不确定”距离由19 m扩大为30 m.可见,目标含水体越厚,其参数的确定度越高.
4.3 线圈参数对STDFw2的影响分析前面分析的参数(电阻率,含水量,含水层厚度)均为反演模型参数,然而,仪器系统参数也是影响反演结果的重要因素.考虑到隧道有限空间的限制,探测线圈的尺寸相对地面大大减小,且放置方向也有所不同.一般情况下,地面MRS探测采用边长为50~150 m的单匝线圈,水平放置,而在隧道内则须利用有效空间布设边长为4~8 m的多匝线圈,直立放置.在本节研究中,将探测线圈的相关参数作为研究对象,设置四组模型,分别探究线圈边长CS、线圈匝数CT、线圈法向偏角α、以及法向倾角β的变化对含水体参数造成的影响.
首先考查线圈边长CS的影响,将其设置为CS=[4, 5, 6, 7, 8] m,其余参数均与表 2中的基本模型相同.计算结果如图 9a所示,随着发射线圈边长从4 m增加到8 m,目标层含水体的探测距离分辨率得到有效改善.具体表现为:“非常确定”的探测距离由9 m扩大到14 m;“完全不确定”距离由18 m扩大到28 m.

|
图 9 发射线圈参数变化对目标层含水体不确定度的影响. (a)线圈边长变化的影响;(b)线圈匝数变化的影响;(c)线圈法向偏角α变化的影响;(d)线圈法向倾角β变化的影响 Fig. 9 Effect of transmitting coil on the determination of water body in target layer. (a) Effect of coil side length on STDFW2; (b) Effect of coil turns on STDFW2; (c) Effect of normal declination of the coil on STDFW2; (d) Effect of normal inclination of the coil on STDFW2. |
接下来考虑通过增大线圈匝数CT来改善含水体的不确定度.将匝数设置为CT=[5, 10, 15, 20, 25, 30].结果如图 9b所示,随着发射线圈匝数从5增加到30,W2的“非常确定”距离从8 m增大到13 m,“完全不确定”距离从16 m增大到27 m.然而,在线圈匝数增加过程中,STDFW2的变化斜率变缓.
第三组模型将线圈的法向偏角α作为研究对象,该角度是矩形线圈的法线方向自北向东偏离的角度,其观测值在-90°~ 90°之间等间隔分布,间隔为30°.观测结果如图 9c所示,当α从-90°改变至90°时,目标含水体的“非常确定”距离在14 m左右,其“完全不确定”距离在27 m左右,其变化不明显.
第四组模型将线圈的法向倾角β作为研究对象,该角度是矩形线圈的法线方向水平向下倾斜的角度,其观测范围同样为-90°~90°之间.观测结果如图 9d所示,当β从-90°改变至90°时,结论与模型三基本一致.可见,线圈的旋转角度对目标含水体确定度的影响不大.
值得注意的是,在进行实际隧道探测时,线圈尺寸和匝数的增加在扩大有效探测距离的同时会导致噪声水平增加.此外,通过本小节前两组模型分析可知,盲目地增加线圈匝数并不一定能够显著降低含水体的不确定度,而应该根据现场空间条件和具体地质情况预先进行不确定度分析,从而合理地配置发射线圈参数.对于线圈旋转角度,虽然其对隧道UMRS探测模型参数的不确定度影响不大,但是线圈法线方向的变化对增大磁共振信号幅度至关重要(林君等,2018).因此,实际探测时应适当调整线圈角度,以获取有效的衰减信号.
4.4 噪声水平对STDFW2的影响分析最后一组模型研究了噪声水平对含水体不确定度的影响.重复了4.3小节中发射线圈匝数作为变量的案例,将高斯噪声标准偏差水平分别设置为16 nV,50 nV,和100 nV.研究结果如图 10所示,随着噪声水平的增加,处在同一位置的目标含水体标准偏差明显增大.以线圈匝数20为例,在三种噪声环境中,STDFW2的“完全不确定”距离依次缩短,分别为24 m、19 m、和16 m.

|
图 10 不同背景噪声水平下,发射线圈匝数变化对目标层含水体不确定度的影响. (a)随机噪声水平为10 nV;(b)随机噪声水平为50 nV;(c)随机噪声水平为100 nV Fig. 10 Effect of turns of transmitting loop on the determination of water body in target layer under different noise levels. (a) Random noise level is 10 nV; (b) Random noise level is 50 nV; (c) Random noise level is 100 nV |
隧道环境复杂,强噪声的存在会严重干扰磁共振信号,是造成反演结果存在误差的重要因素,这严重制约了UMRS的应用范围.因此,在实际探测中,为保证探测结果的确定度,应该尽量降低环境噪声,移开干扰源.在噪声复杂的情况下,可采取有效的信号消噪方法来排除干扰.从信号采集方面考虑,可以采用多通道采集系统,利用参考消噪方式进行噪声抵消(Walsh,2008;Larsen et al,2014),除此之外,利用高灵敏度SQUID传感器进行信号采集也可大大提高数据的信噪比(董慧,2011);从软件算法方面考虑,时频峰值滤波法是一种实用且高效的抑制磁共振信号中随机噪声的方法(Lin,2018b),此外,在实际观测数据中直接提取有效的衰减信号也是一种可行的手段(Müller-Petke,2016).
5 结论本文基于地面磁共振探测理论,推导了隧道矩形发射线圈激发场计算表达式,模拟了基于准全空间核函数的隧道磁共振响应,为进行反演参数不确定度分析提供正演计算基础.研究了隧道磁共振探测模型参数不确定度分析方法,计算模型协方差矩阵,获得参数标准偏差因子,划分参数不确定度等级.通过调整模型参数,在正演响应基础上加入仿真噪声模拟隧道探测综合数据,分别研究了电阻率,含水量,含水层厚度,发射线圈边长,匝数,线圈旋转角度以及噪声水平对目标含水体探测分辨率的影响.通过对比分析,总结出各参数对含水模型不确定度影响的一般性结论.
本文的研究成果通过计算隧道磁共振测深超前探测参数不确定度,为反演结果中各模型参数的准确性评估提供依据.同时,在实际隧道探测实验中,根据具体探测目标预先进行参数不确定度计算,将有助于指导和优化仪器参数配置,提高探测效率.
Auken E, Christiansen A V. 2004. Layered and laterally constrained 2D inversion of resistivity data. Geophysics, 69(3): 752-761. |
Behroozmand A A, Auken E, Fiandaca G, et al. 2012. Efficient full decay inversion of MRS data with a stretched-exponential approximation of the T2* distribution. Geophysical Journal International, 190(2): 900-912. DOI:10.1111/j.1365-246X.2012.05558.x |
Behroozmand A A, Dalgaard E, Christiansen A V, et al. 2013. A comprehensive study of parameter determination in a joint MRS and TEM data analysis scheme. Near Surface Geophysics, 11(5): 557-567. DOI:10.3997/1873-0604.2013040 |
Braun M, Yaramanci U. 2003. Inversions of Surface-NMR signals using complex kernels.//Proceedings of the 9th EAGE/EEGS Meeting. Prague, Czech Republic: European Association of Geoscientists & Engineers.
|
Chalikakis K, Nielsen M R, Legchenko A. 2008. MRS applicability for a study of glacial sedimentary aquifers in Central Jutland, Denmark. Journal of Applied Geophysics, 66(3-4): 176-187. DOI:10.1016/j.jappgeo.2007.11.005 |
Costabel S, Skibbe N, Dlugosch R, et al. 2017. The potential of mobile nuclear magnetic resonance sensors for moisture detection in tunnels and mines.//Proceedings of 2017 Innovative Feuchtemessung in Forschung und Praxis. Karlsruhe: Competence Center for Material Moisture.
|
Dong H. 2011. SQUID-based Ultralow Field NMR/MRI Study[Ph. D. thesis] (in Chinese). Shanghai: Shanghai Institute of Microsystem and Information Technology, Chinese Academy of Sciences.
|
Larsen J J, Dalgaard E, Auken E. 2014. Noise cancelling of MRS signals combining model-based removal of powerline harmonics and multichannel Wiener filtering. Geophysical Journal International, 196(2): 828-836. DOI:10.1093/gji/ggt422 |
Legchenko A, Valla P. 2002. A review of the basic principles for proton magnetic resonance sounding measurements. Journal of Applied Geophysics, 50(1-2): 3-19. DOI:10.1016/S0926-9851(02)00127-1 |
Legchenko A, Baltassat J M, Beauce A, et al. 2002. Nuclear magnetic resonance as a geophysical tool for hydrogeologists. Journal of Applied Geophysics, 50(1-2): 21-46. DOI:10.1016/S0926-9851(02)00128-3 |
Legchenko A V, Shushakov O A. 1998. Inversion of surface NMR data. Geophysics, 63(1): 75-84. |
Li X, Liu W T, Zhi Q Q, et al. 2015. Three-dimensional joint interpretation of nuclear magnetic resonance and transient electromagnetic data. Chinese Journal of Geophysics (in Chinese), 58(8): 2730-2744. DOI:10.6038/cjg20150810 |
Lin J, Jiang C D, Lin T T, et al. 2013. Underground Magnetic Resonance Sounding (UMRS) for detection of disastrous water in mining and tunneling. Chinese Journal of Geophysics (in Chinese), 56(11): 3619-3628. DOI:10.6038/cjg20131103 |
Lin J, Zhang J, Yi X F. 2017. Design and experiment of small antenna for magnetic resonance sounding in underground applications. Chinese Journal of Geophysics (in Chinese), 60(11): 4184-4193. DOI:10.6038/cjg20171106 |
Lin J, Zhao Y, Yi X F, et al. 2018. Characteristics of underground magnetic resonance and advanced detection of hazardous water. Chinese Journal of Geophysics (in Chinese), 61(4): 1615-1627. DOI:10.6038/cjg2018L0444 |
Lin T T, Wan L, Qu Y X, et al. 2013. Quasi-whole space magnetic resonance theory and its application in tunnel advanced detection. The Chinese Journal of Nonferrous Metals (in Chinese), 23(9): 2413-2421. |
Lin T T, Zhang Y, Wan L, et al. 2016. A Para-whole space model for underground magnetic resonance sounding studies. IEEE Journal of Selected Topics in Applied Earth Observations and Remote Sensing, 9(1): 264-271. DOI:10.1109/JSTARS.2015.2457445 |
Lin T T, Yang Y J, Yi X F, et al. 2018a. First evidence of the detection of an underground nuclear magnetic resonance signal in a tunnel. Journal of Environmental and Engineering Geophysics, 23(1): 77-88. |
Lin T T, Zhang Y, Yi X F, et al. 2018b. Time-frequency peak filtering for random noise attenuation of magnetic resonance sounding signal. Geophysical Journal International, 213(2): 727-738. DOI:10.1093/gji/ggy001 |
Metwaly M, Elawadi E, Moustafa S S R, et al. 2014. Combined Inversion of electrical resistivity and transient electromagnetic soundings for mapping groundwater contamination plumes in Al Quwy'yia Area, Saudi Arabia. Journal of Environmental and Engineering Geophysics, 19(1): 45-52. |
Müller-Petke M, Yaramanci U. 2006. Analysis of magnetic resonance tomographic (MRT) kernels for optimized field layouts.//Near Surface 2006, 12th European Meeting of Environmental and Engineering Geophysics. Helsinki, Finland: EAGE, 37-40.
|
Müller-Petke M, Yaramanci U. 2010. QT inversion -Comprehensive use of the complete surface NMR data set. Geophysics, 75(4): WA199-WA209. |
Müller-Petke M, Braun M, Hertrich M, et al. 2016. MRSmatlab-A software tool for processing, modeling, and inversion of magnetic resonance sounding data. Geophysics, 81(4): WB9-WB21. |
Qin S W, Ma Z J, Lin J, et al. 2018. New method for detecting risk of tunnel water-induced disasters using magnetic resonance sounding. IEEE Geoscience and Remote Sensing Letters, 15(6): 843-847. DOI:10.1109/LGRS.2018.2812103 |
Shushakov O A. 1996. Groundwater NMR in conductive water. Geophysics, 61(4): 998-1006. |
Sun H F, Li S C, Li X, et al. 2013. Feasibility of using magnetic resonance sounding in prediction of water bearing structures in front of a tunnel face. Journal of Shandong University (Engineering Science) (in Chinese), 43(1): 92-97, 103. |
Tarantola A, Valette B. 1982. Generalized nonlinear inverse problems solved using the least squares criterion. Reviews of Geophysics, 20(2): 219-232. DOI:10.1029/RG020i002p00219 |
Vouillamoz J M, Favreau G, Massuel S, et al. 2008. Contribution of magnetic resonance sounding to aquifer characterization and recharge estimate in semiarid Niger. Journal of Applied Geophysics, 64(3-4): 99-108. DOI:10.1016/j.jappgeo.2007.12.006 |
Wait J R. 1981. Wave Propagation Theory. New York: Pergamon Press.
|
Walsh D O. 2008. Multi-channel surface NMR instrumentation and software for 1D/2D groundwater investigations. Journal of Applied Geophysics, 66(3-4): 140-150. DOI:10.1016/j.jappgeo.2008.03.006 |
Wan L, Lin T T, Lin J, et al. 2013. Joint inversion of MRS and TEM data based on adaptive genetic algorithm. Chinese Journal of Geophysics (in Chinese), 56(11): 3728-3740. DOI:10.6038/cjg20131114 |
Weng A H, Wang X Q, Liu G X, et al. 2007. Nonlinear inversion of surface nuclear magnetic resonance over electrically conductive medium. Chinese Journal of Geophysics (in Chinese), 50(3): 890-896. |
Xiong Z H. 1989. Electromagnetic fields of electric dipoles embedded in a stratified anisotropic earth. Geophysics, 54(12): 1643-1646. DOI:10.1190/1.1442633 |
Zhao W, Li X, Liu J P. 2018. Research on full-relaxation signal 3D inversion of tunnel nuclear magnetic resonance. Progress in Geophysics (in Chinese), 33(2): 900-908. |
董慧. 2011.基于超导量子干涉器件的极低场NMR/MRI研究[博士论文].上海: 中国科学院(上海微系统与信息技术研究所).
|
李貅, 刘文韬, 智庆全, 等. 2015. 核磁共振与瞬变电磁三维联合解释方法. 地球物理学报, 58(8): 2730-2744. DOI:10.6038/cjg20150810 |
林君, 蒋川东, 林婷婷, 等. 2013. 地下工程灾害水源的磁共振探测研究. 地球物理学报, 56(11): 3619-3628. DOI:10.6038/cjg20131103 |
林君, 张健, 易晓峰. 2017. 地下核磁共振小尺寸线圈设计和实验. 地球物理学报, 60(11): 4184-4193. DOI:10.6038/cjg20171106 |
林君, 赵越, 易晓峰, 等. 2018. 地下磁共振响应特征与超前探测. 地球物理学报, 61(4): 1615-1627. DOI:10.6038/cjg2018L0444 |
林婷婷, 万玲, 曲永星, 等. 2013. 隧道超前探测准全空间磁共振理论及应用. 中国有色金属学报, 23(9): 2413-2421. |
孙怀凤, 李术才, 李貅, 等. 2013. 核磁共振测深进行隧道超前地质预报的可行性. 山东大学学报(工学版), 43(1): 92-97, 103. |
万玲, 林婷婷, 林君, 等. 2013. 基于自适应遗传算法的MRS-TEM联合反演方法研究. 地球物理学报, 56(11): 3728-3740. DOI:10.6038/cjg20131114 |
翁爱华, 王雪秋, 刘国兴, 等. 2007. 导电性影响的地面核磁共振反演. 地球物理学报, 50(3): 890-896. |
赵威, 李貅, 刘金鹏. 2018. 隧道磁共振全弛豫信号三维反演研究. 地球物理学进展, 33(2): 900-908. |