 2019, Vol. 62
2019, Vol. 62



2. 中国科学院页岩气与地质工程重点实验室, 北京 100029;
3. 中国科学院大学, 北京 100049
2. Key Laboratory of Shale Gas and Geoengineering, Chinese Academy of Sciences, Beijing 100029, China;
3. University of Chinese Academy of Sciences, Beijing 100049, China
随钻测量(Measurement While Drilling, MWD)是指在钻井过程中利用测量得到井下仪器位置信息, 从而进行井眼轨迹的调整(杨全进等, 2014; Sognnes et al., 1996).目前随钻测量是通过加速度计和磁力仪分别测量地球重力场和地磁场来计算井下方位信息(徐涛, 2006), 其中加速度计测量受到的影响较小且校正方法成熟可靠, 而磁力仪的磁场测量值受外界影响较大, 因此整个随钻测量的重点和难点在于磁方位的校正(刘庆龙, 2013; Priest, 2014).而磁方位校正的精度直接影响着钻井风险、钻遇率和井眼轨迹的调整(Lowdon et al., 2003; Nyrnes et al., 2005).随着水平井、多分支井等定向井的出现, 随钻测量行业对磁方位精度的需求越来越高, 迫切需要一套高精度的磁方位校正方法, 而单测点磁方位校正的精度非常有限(刘庆龙等, 2013;徐宝昌等, 2013).
在20世纪90年代随钻测井出现后, 井下方位信息一直是随钻测井行业的难点和焦点.国外在21世纪之前大都是以单测点为基础来进行磁方位校正, 直到Brooks提出多测点分析磁方位校正后, 磁方位校正才由单测点走向多测点.Brooks的多测点磁干扰校正理论的基本原理是参照当地实测磁场强度来进行磁干扰校正(Brooks et al., 1998).由于水平井、多分支井的出现又对磁方位精度有了更高的要求, 也开始突显出传统多测点分析法的缺点:数据量大, 运算复杂, 对地磁场依赖较大, 而且大部分算法适用性较差、收敛性差.因此各大石油公司为了追求更高的磁方位精度开始优化多测点磁方位校正的方法, 来进一步的提高井下方位信息的精确性.
国内随钻测量行业主要采用单测点磁方位校正, 得到的方位校正精度在2°左右(周树道等, 2015;许昊东等, 2014).中国石油渤海钻探公司的BH-MWD高温随钻测量仪器在常规地层的磁方位精度在1°左右, 上海神开石油设备有限公司FMWD无线随钻测量中磁方位精度在2°以内.由于多测点分析法的使用和优化, 国外的随钻测量中磁方位的精度控制在0.2°左右(Buchanan et al., 2013; Hanak et al., 2015).而国内随钻测量行业起步较晚, 井下方位信息都以单测点磁方位校正为主, 尚未引进多测点分析法.笔者根据国际磁方位校正的发展, 基于Brooks的多测点理论将单测点校正的方法和多测点校正的方法结合起来, 以收敛性为前提推导和优化多测点分析法.在深入分析姿态测量原理和多测点分析法理论的基础上, 改进多测点分析法, 从而进一步的提高井下方位角的精度, 得到一套高精度的磁方位校正方法.通过实验验证本文改进的多测点分析理论, 用改进的多测点分析法得到的方位角精度能达到0.2°以内, 大幅度提高了井下方位角的精度.
1 多测点姿态测量的原理 1.1 姿态测量原理姿态测量过程中仪器的坐标位置会不断的发生变化, 而作为参考坐标系的地理坐标系始终保持不变.所谓的姿态测量就是测量仪器在地理坐标系下的姿态, 但是传感器只能观测到仪器坐标下的值, 因此需要通过换算将仪器坐标系转换到地理坐标系上来最终获得井下方位信息(刘永旺等, 2013;张慧慧等, 2011).
如图 1所示, 以右手法则建立“北(N)、东(E)、地(G)”地理坐标系, 将其作为参考坐标系.以右手法则建立仪器坐标系oXYZ, 其中Z轴为仪器的轴线方向, X轴为工具面的法线方向, 与Y轴一起组成右手直角坐标系.θ角为仪器轴线Z轴与竖直方向的夹角, 即井斜角; 仪器轴线Z轴在水平面上的投影与地磁正北方向的夹角, 即方位角(Weston et al., 2014; Xue et al., 2013).

|
图 1 地理坐标系和仪器坐标系 Fig. 1 Geographic coordinates and instrumental coordinates |
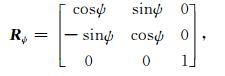
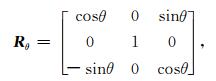
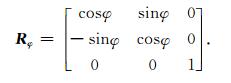
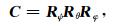
在任一个固定的位置, 仪器总能从对应的一个姿态通过三次旋转和坐标转换得到当前姿态, 并且可以用旋转矩阵表示.以地理坐标系北东地oX0Y0Z0为参考坐标系, 经过绕Z0轴旋转ψ到oX1Y1Z1, 再绕Y1轴旋转θ到oX2Y2Z2, 最后绕Z2轴旋转φ得到当前的姿态oXbYbZb, 如图 2所示.

|
图 2 仪器坐标系和地理坐标系转换 Fig. 2 Transformation of instrumental coordinates and geographic coordinates |
那么三个旋转矩阵依次为:
|
(1a) |
|
(1b) |
|
(1c) |
故可得旋转矩阵:
|
(2) |
其中ψ为方位角, θ为井斜角, φ为工具面角.
由图 2可知, 仪器坐标系oXbYbZb和地理坐标系oX0Y0Z0的关系可以表示为:

|
(3) |
用gx、gy、gz表示加速度计测量的数据, Bx、By、Bz表示三分量磁力仪的测量数据.当钻井仪器开始处在参考地理坐标系的位置时, 即钻井仪器竖直放置, 那么有gx0=gy0=0, gz0=+g.当前姿态下加速度计测量值可以用矩阵表示为:

|
(4) |
由此可推算出井斜角θ和工具面角φ的值为:

|
(5) |
|
(6) |
在当地水平面上, 磁力仪在(北/东/地)方向的测量值可以表示为:

|
(7) |
其中H为当地地磁场大小, Ω为当地磁倾角.则有:
|
(8) |
由此可以推出方位角ψ的大小为:

|
(9) |
Brooks(1998)提出多测点分析的基本原理, 即:

|
(10) |
式中Bhi是组成地磁场的垂直磁场分量, Bvi是组成地磁场的水平分量.Bhi和Bvi都可以通过磁力仪和加速度计测量出来.
|
(11) |

|
(12) |

|
(13a) |

|
(13b) |

|
(13c) |
式中Bxmeasi、Bymeasi和Bzmeasi是指磁力仪分别在第i个测点的X轴、Y轴、Z轴方向的磁场测量值, Bxcorri、Bycorri和Bzcorri分别是磁力仪X轴、Y轴、Z轴方向校正后的磁场值.Gxi、Gyi和Gzi是指加速度计分别在第i个测点的X轴、Y轴、Z轴方向的加速度值.
由式(10)—(13)可知εx、εy和εz是使式(10)的V最小, 从而得到的X、Y、Z轴校正值.因此只需要求V最小情况下的εx、εy和εz的值, 便是最后的磁场校正值.
1.3 多测点分析算法缺点及优化常规多测点分析算法一般都是由以下求得(ElGizawy et al., 2010):

|
(14a) |

|
(14b) |

|
(14c) |
通过式(14)理论上能得出εx、εy和εz的值, 实际上是εx和εy的值远小于εz的值, 而且具有多个极值点, 在大多数情况下依然无法得到真正的校正值.部分钻井工程中, 将εx和εy的值设为0, 但在实际过程中对X轴和Y轴的测量依然有微弱影响, 校正后方位的精确度还有待提高.
为了提高方位的精确度, 需要将X轴、Y轴的测量值校正与Z轴的测量值校正分开进行.先用常规的椭圆校正法校正X轴和Y轴的测量数据, 再用多测点分析法校正Z轴的测量数据.在实际过程中校正Z轴时, Z轴的校正极值点波动很大, 无法获取真正的校正值.因此首先需要得到Z轴校正值的置信区间, 然后在特定范围内进行多测点分析从而得到Z轴校正值.
2 多测点分析算法改进 2.1 椭圆校正磁场X轴和Y轴在实际钻井过程中, 钻井仪器旋转一圈时, 钻进深度可以忽略不计, 可以当作仪器在原地旋转了一圈.如图 1所示, 在这种情况下钻进一圈时, 磁力仪的Z轴的磁场测量值可以认为没有发生变化, 而X轴和Y轴的磁场测量值不断发生变化(Weston et al., 2016).由于地球磁场值短时间内可以看成一个固定值, 可以得到:

|
(15) |
常数const在无干扰的情况下指的是当地的地磁场值.由于Z轴的值在一圈中固定, 所以:

|
(16) |
由式(16)可以知道在无任何磁场干扰的情况下, X轴和Y轴数值的平方和趋近于一个圆, 因此根据式(16)的原理使得X轴和Y轴的数据能拟合成一个圆, 从而达到对X轴和Y轴的数据进行校正.
根据椭圆校正的原理可以得到X轴和Y轴的校正系数(Flook et al., 2013):

|
(17) |

|
(18) |

|
(19) |
|
(20) |

|
(21) |

|
(22) |
先对X轴和Y轴的数据用式(17)—(22)进行校正求取X轴和Y轴的磁场校正值, 然后再用多测点分析法求Z轴的校正值.
2.2 多测点分析多测点分析的第一步是求取多个测点中平均点的磁场校正值εz0.
多测点分析法和单测点法主要的区别就是多测点法要用到多个测点一起去校正, 能够降低偶然性带来的误差, 这样校正的精度更高一点.根据实际钻井过程, 以地磁场参考模型Bh和Bv为参考点画出测点图.如图 3所示, 点R0是所有测点到地磁参考点的平均点, ri是第i个测点到平均点的向量, Ri是指第i个测点到参考点的向量.

|
图 3 多测点分布图 Fig. 3 Distribution of multi-station |
图 3中, Ri=R0+ri即为第i个测点的测量数据.因此公式(10)可以写成:

|
(23) |
将式(23)展开可以写成:

|
(24) |
由于
因此式(24)可以简化成:

|
(25) |
其中
由此可以得到:

|
(26) |
其中
将式(11), (12)代入式(26), 可以求得多测点的平均点的磁场校正值εz0:

|
(27) |
通过式(27)解得εz0, εz0的值指的是测点平均点的Z轴磁场校正值, 其他测点的Z轴磁场校正值必然在εz0的附近.
多测点分析法的第二步是通过获得Z轴误差值可靠的取值范围, 来求取Z轴误差值的置信区间.
通过井眼轨迹函数和剩磁场干扰可以得到Z轴误差值随坐标递增量(Buchanan, 2013; Bulychenkov, 2013):

|
(28) |
其中σmin=σ(εz0), 是式(26)求得εz0后的σ值.rxy在理想状态即井下没有任何磁干扰的情况下为0, 但是rxy对于磁干扰很敏感在实际情况中不可能为0, 根据经验可知rxy值介于0.1~0.2之间, 在实际计算过程中rxy只要取到0.1~0.2之间, 对整体几乎没有影响, 可以忽略不计(Nyrnes et al., 2009; Bulychenkov, 2013).

|
(29) |
rxy0是环境磁干扰与钻具磁干扰之间的校正系数.其中
|
(30) |

|
(31) |
σk是向量kl的偏差, kl是在轴向钻具干扰为1 nT的情况下, 第i个测点偏离参考点的偏差量.式(31)可以进一步简化成:

|
(32) |
Δεz的意义是指测点到平均点的Z轴误差的增加值或减少值.因此通过式(28)可以得到Z轴校正值的置信区间为[εz0-Δεz, εz0+Δεz].得到轴向校正值的取值区间, 这样将校正值限定在可靠的取值区间内, 简化多测点分析法复杂性, 排除了不应该出现的误差值, 进一步保证了整个算法的收敛性, 即在求取Z轴校正值时只有一个极值点.
多测点分析法的最后一步是在[εz0-Δεz, εz0+Δεz]区间内求取式(10)中V最小的Z轴校正值εzf:
|
(33) |
通过式(33)得到最后的Z轴校正值εzf.
3 实验数据分析实验时施加一定干扰条件, 给予Z轴2000 nT左右的磁干扰, X轴和Y轴的磁场干扰值80 nT左右.选取一组东西向的数据来说明改进后多测点分析算法的效果.
3.1 椭圆校正磁场X轴和Y轴以实验室数据分析为例, 取一组旋转数据, 共1323个样点的X轴和Y轴的数据来进行X轴和Y轴校正.
由图 4可以看出校正前X轴和Y轴的数据磁干扰较大, 经过校正后X轴的数据和Y轴的数据能拟合成一个平滑的圆, 说明X轴和Y轴的磁干扰校正得较好.

|
图 4 校正前(a)、后(b)X轴和Y轴数据 Fig. 4 The X-axis and Y-axis data before (a) and after (b) calibration |
图 4中拟合成圆的参数就是校正系数, 通过式(17)—(22)计算得到:

|
使用校正系数来校正X轴和Y轴的所有测量数值, 从而得到X轴和Y轴的磁场校正值.按此方法来依次对每圈的X轴和Y轴数据进行校正.
3.2 改进多测点算法实验数据分析第一步求出多测点的平均点的磁场校正值εz0, 通过式(23)—(27)可得到图 5.

|
图 5 多测点的中间解 Fig. 5 Intermediate solution of multi-station |
一般钻井工具用的是无磁钻杆和一些磁性很弱的钻具, 其磁性干扰不可能超过地磁场的值.因此图 5中的上限是±10000 nT.从图 5可以看出求取中间解时收敛性好, 极值点非常明确, 很容易得到εz0=2777 nT.
第二步求取Z轴校正值εzf的置信区间, 通过式(28)—(32)可以计算得到误差值的坐标增量Δεz=1255.4 nT.
第三步求取Z轴的误差校正值εzf, 通过式(33)可以得到图 6.

|
图 6 Z轴校正值 Fig. 6 Z axis correction value |
通过图 6可以看出改进后的多测点分析算法收敛性很好, 极值点明显, 最终的误差校正值εzf=2015.6 nT.
最终得到的X轴和Y轴的误差校正值和真实的干扰值差别很小, 维持在10 nT的范围内.实验室给予的Z轴干扰是2000 nT左右, 改进后的多测点分析算法得到的是2015.6 nT, 和Z轴的误差校正值也十分接近.总体磁干扰校正值的精度在数十纳特范围内.
3.3 改进后方位角数据分析将求得的Z轴校正值代入方位角计算公式即式(9)得到仪器在多个测点的方位角, 校正后的方位角和原始数据下的方位角如图 7所示.

|
图 7 改进多测点分析法磁方位和真实磁方位对比图 Fig. 7 A comparison of improved magnetic multi-station analysis azimuth and real magnetic azimuth |
从图 7可以看出使用改进后的多测点分析法校正后的方位角和真实的方位角基本重合, 由于磁干扰并不可能完全消除, 所以两条线也没有完全重合, 误差在0.2°左右.图 8中可以看出校正前后的方位角差别4°左右, 这说明如果不对原始数据进行任何磁方位校正, 原始方位角的精度很低无法满足实际钻井要求.从图 7和图 8可以看出改进后多测点分析法大幅度的提高了井下方位角的精度.

|
图 8 改进多测点分析法磁方位和处理前磁方位对比 Fig. 8 A comparison of improved magnetic multi-station analysis azimuth and pre-data processing azimuth |
如图 9所示, 从常规的多测点分析法得到的磁方位与改进后多测点分析法得到的磁方位对比来看, 常规的多测点磁方位校正依然存在精度低的问题.只校正Z轴的多测点分析得到的校正值偏大, 方位曲线向上移动, 精度比改进后的多测点分析低.若对X轴和Y轴、Z轴都校正, Z轴校正值偏低, X轴和Y轴的校正值偏高, 因此整个方位曲线往下移.在常规的测点计算中, 由于没有Z轴取值的置信区间的限制, 常规多测点分析求取极值的曲线不易收敛波动性, 并不适合在大斜度钻井过程中的井下高精度定位.

|
图 9 改进多测点分析磁方位和其他常规多测点分析校正对比图 Fig. 9 A comparison of improved magnetic multi-station analysis azimuth and conventional magnetic multi-station analysis azimuth |
图 4到图 9选取的是接近东西向的磁方位数据.之所以优先选取东西向数据是因为钻井工程中, 磁方位最难确定的位置就是东西向.东西向的井下方位信息难以确定的原因主要和地磁场有关, 在东西向磁场强度最弱, 测量得到的地磁场值小, 外界误差干扰大且不容易消除, 因而造成东西的方位精度低.从图 1可以看到钻头指向东和指向西是对称的, 北和南是对称的.地球磁场方向是南北向最大, 东西向最小.因此选取东方向和西方向中的任意一个方向, 南方向和北方向中的任意一个方向就可以验证改进后多测点分析法的效果, 图 10为南北向的改进后的多测点分析法校正得到的磁方位对比图.

|
图 10 北方向的改进多测点分析磁方位和处理前磁方位, 真实磁方位对比图 Fig. 10 A comparison of improved magnetic multi-station analysis azimuth, pre-data processing azimuth and real magnetic azimuth in north direction |
从图 10中可以看出三条方位曲线的差别并没有图 8和图 9中的那么大, 磁干扰下获得的原始磁方位和真实磁方位差别不大, 误差在0.2°以内, 校正后的磁方位和真实磁方位基本重合.图 8、图 9和图 10展示了改进后的多测点分析能够360°全方位的对磁方位进行校正, 进而提高井下的方位信息的精度.
4 结论(1) 常规单测点磁方位校正在随钻测量的磁方位校正中精度很差, 在东西方向无法使用, 因而降低了钻井效率; 改进后的多测点分析法能够实现360°全方位的对磁方位进行校正, 得到接近真实的磁方位值, 使仪器更精确的钻到目标层, 节约时间人力物力, 极大提高了钻井效率.
(2) 改进后的多测点分析法是综合使用多个测点得到的磁方位, 降低了测点磁方位的偶然性误差, 且磁方位校正精确度更高, 保证了随钻技术中井下方位信息的精确性.
(3) 与常规多测点分析法相比, 改进后的多测点分析算法的精度能控制在0.2°内, 接近国际钻井工程中磁方位校正的精度.由于改进后的多测点分析需要用到磁方位的井眼轨迹坐标递增量, 因此在井斜角变化较大的大斜度钻井工程中效果更好, 对于井斜角变化较小的钻井过程中的效果和所期待的效果仍有差距, 下一步将开展减小井斜角变化对多测点分析法精度的影响研究.
Bowler A, Sugiura J, Lowdon R, et al. 2013. An innovative survey method using rotating sensors significantly improves the continuous azimuth and inclination measurement near vertical and offers improved kickoff capabilities. //83rd Ann. Internat Mtg., Soc. Expi. Geophys.. Expanded Abstracts.
|
Brooks A G, Gurden P A, Noy K A. 1998. Practical application of a multiple-survey magnetic correction algorithm. //68th Ann. Internat Mtg., Soc. Expi. Geophys.. Expanded Abstracts.
|
Buchanan A, Finn C A, Love J J, et al. 2013. Geomagnetic referencing-the real-time compass for directional drillers. Schlumberger, 25(3): 32-47. |
Bulychenkov K. 2013. Improving multistation analysis of MWD directional magnetic surveys. //83th Ann. Internat Mtg., Soc. Expi. Geophys.. Expanded Abstracts.
|
ElGizawy M, Noureldin A, Georgy J, et al. 2010. Wellbore surveying while drilling based on Kalman filtering. American Journal of Engineering and Applied Sciences, 3(2): 240-259. DOI:10.3844/ajeassp.2010.240.259 |
Flook R, Alexander W, List D, et al. 2013. At-Bit inclination, gamma, and imaging system tracks productive zone in complex geology. Society of Petroleum Engineers, 65(3): 30-32. |
Hanak F C, Wilson H, Gjertsen M. 2015. Assessment of the validity of MWD survey accuracy following multistation analysis. //85th Ann. Internat Mtg., Soc. Expi. Geophys.. Expanded Abstracts.
|
Liu Q L. 2013. On research and application of rotating magnetic guidance method. Well Logging Technology (in Chinese), 37(3): 249-252. |
Liu Y W, Guan Z C, Zhao G S, et al. 2013. Screwdrill-based near-bit deviation MWD error and correction. China Petroleum Machinery (in Chinese), 41(4): 1-5. |
Lowdon R M, Chia C R. 2003. Multistation analysis and geomagnetic referencing significantly improve magnetic survey results. //73rd Ann. Internat Mtg., Soc. Expi. Geophys.. Expanded Abstracts.
|
Nyrnes E, Torkildsen T. 2005. Error properties of magnetic directional surveying data. //75th Ann. Internat Mtg., Soc. Expi. Geophys.. Expanded Abstracts.
|
Nyrnes E, Torkildsen T, Wilson H. 2009. Minimum requirements for multi-station analysis of MWD magnetic directional surveys. //79th Ann. Internat Mtg., Soc. Expi. Geophys.. Expanded Abstracts.
|
Priest J, Quinn T, Frost E Jr. 2014. Magnetic interference effects on accelerometer and magnetometer data: detection, quality control and correction. //84th Ann. Internat Mtg., Soc. Expi. Geophys.. Expanded Abstracts.
|
Sognnes R, Smith B, McElhinney G, et al. 1996. Improving MWD survey accuracy in deviated wells by use of a new triaxial magnetic azimuth correction method. //66th Ann. Internat Mtg., Soc. Expi. Geophys.. Expanded Abstracts.
|
Weston J, Ledroz A. 2016. All-attitude gyrocompass tool offers significant enhancement in survey accuracy over the highest performance MWD magnetic system. //86th Ann. Internat Mtg., Soc. Expi. Geophys.. Expanded Abstracts.
|
Weston J L, Ledroz A G, Ekseth R. 2014. New gyro while drilling technology delivers accurate azimuth and real-time quality control for all well trajectories. Society of Petroleum Engineers, 29(3): 295-303. |
Xu B C, Zuo X, Xue H X, et al. 2013. An unscented Kalman filter method for attitude measurement of rotary steerable drilling assembly. Acta Petrolei Sinica (in Chinese), 34(6): 1168-1175. |
Xu H D, Huang G L, Zhang R, et al. 2014. Method of magnetic interference correction in survey with magnetic MWD. Petroleum Drilling Techniques (in Chinese), 42(2): 102-106. |
Xu T. 2006. Research on MWD surveying method and locating technique of horizontal directional drilling [Ph. D. thesis] (in Chinese). Changsha: National University of Defense Technology.
|
Xue Q L, Huang L L, Liu B L, et al. 2015. Dynamic measurement of spatial attitude of bottom rotating drillstring. The International Society of Offshore and Polar Engineers: 1519-1526. |
Yang Q J, Jiang H X, Zuo X. 2014. A new solution for dynamic direction measurement while down-hole drill string rotating. Oil Drilling & Production Technology (in Chinese), 36(1): 40-43. |
Zhang H H, Zong Y B, Shi X F. 2011. Research and application of dynamical measurement of drill tool attitude in vertical drilling. Well Logging Technology (in Chinese), 35(5): 422-426. |
Zhou S D, Jin Y Q, Wei K J, et al. 2015. Attitude measurement of MEMS devices by using the Kalman filter algorithm. Research and Exploration in Laboratory (in Chinese), 34(2): 38-42. |
刘庆龙. 2013. 旋转磁场导向定位方法研究与应用. 测井技术, 37(3): 249-252. DOI:10.3969/j.issn.1004-1338.2013.03.006 |
刘永旺, 管志川, 赵国山, 等. 2013. 基于螺杆钻具的近钻头井斜测量误差及修正. 石油机械, 41(4): 1-5. DOI:10.3969/j.issn.1001-4578.2013.04.001 |
徐宝昌, 左信, 蒋海旭, 等. 2013. 旋转导向钻具姿态的无迹卡尔曼滤波方法. 石油学报, 34(6): 1168-1175. |
徐涛. 2006.水平定向钻进随钻测量方法及定位技术研究[博士论文].长沙: 国防科技大学.
|
许昊东, 黄根炉, 张然, 等. 2014. 磁力随钻测量磁干扰校正方法研究. 石油钻探技术, 42(2): 102-106. |
杨全进, 蒋海旭, 左信. 2014. 一种用于井下钻具旋转中动态方位测量的新方法. 石油钻采工艺, 36(1): 40-43. |
张慧慧, 宗艳波, 史晓锋. 2011. 垂直钻井中钻具姿态动态测量算法研究与应用. 测井技术, 35(5): 422-426. DOI:10.3969/j.issn.1004-1338.2011.05.007 |
周树道, 金永奇, 卫克晶, 等. 2015. 采用卡尔曼滤波算法的MEMS器件姿态测量. 实验室研究与探索, 34(2): 38-42. DOI:10.3969/j.issn.1006-7167.2015.02.010 |