 2018, Vol. 61
2018, Vol. 61


国内外具备空间磁场探测功能的航天器,如TC-1、TC-2、DEMETER、CLUSTER、Rosetta、MagSat、CHAMP、Swarm等卫星,都采取了严格的磁洁净控制措施,来保证空间磁场的探测精度(Narvaez,2004;Ludlam et al., 2008;陈斯文,2009;冯彦等,2010;Weikert et al., 2012).为了尽可能降低卫星本身的磁场干扰,磁测卫星一是需要进行整星的磁洁净控制,二是需要采用长伸杆的方式将磁强计安装在远离卫星本体的位置.经该方式处理后,磁测卫星的磁场干扰量一般可控制到1 nT量级的水平.
地球LEO轨道的磁测卫星,其磁场干扰一般明显大于地球中高轨道的卫星和大部分的深空探测器,主要原因在于:一是LEO轨道地球磁场强度大,最高可达50000 nT以上,这将直接作用于卫星,使之产生较大的感应磁场,且感应磁场的大小和方向会随着轨道位置的变化而变化,其影响甚至占干扰磁场的主要部分;二是近些年我国的LEO三轴稳定卫星,技术成熟度高,平台基本都配置了磁力矩器,用于姿态控制(郑育红和王平,2000;Mohammed et al., 2006;贾飞蕾等,2010),磁力矩器产生的干扰磁场很大,需加以控制(黄琳和荆武兴,2005).例如我国新一代的低轨磁测卫星—电磁监测卫星使用了长达4.5 m的伸杆,同时实施严格的磁洁净设计和控制措施,来保证伸杆顶部磁强计安装位置的干扰磁场最小(周斌等,2014).电磁监测卫星使用了一组100 A·m2、两组50 A·m2的磁力矩器,经评估在磁力矩器关机时,卫星在轨仍会产生 < 1 nT的剩磁场干扰、2~3 nT左右的感应磁场干扰(肖琦等,2016).为了提高卫星的空间磁场探测精度,就需要通过整星磁场标定和在轨数据处理的方法来进一步减小干扰磁场的影响.
卫星1 nT量级的弱磁场标定十分困难,需要解决测试场地的环境磁场干扰、卫星状态变化带来的剩磁场变化、在轨地磁场环境模拟和感应磁场测量等难题.为此本文提出新的测量、标定和数据修正方法,并应用于低轨磁测卫星极弱干扰磁场的处理.
1 卫星干扰磁场标定方法研究 1.1 磁场标定条件分析卫星干扰磁场标定需要大尺寸、高稳定度、均匀的零磁场和标准磁场环境.目前国内最高性能的大型磁环境模拟设备,磁场模拟范围±100000 nT,磁场模拟分辨力1 nT,环境磁场干扰不大于1 nT/10 min.需在零磁场环境中测量卫星的剩磁场以及剩磁场变化量,在标准磁场环境中测量卫星的感应磁场.磁环境模拟设备的性能指标决定了磁场测量和标定精度,采用传统方法可实现的最优精度在1 nT左右,为达到更高的精度,需建设更好的设备或研究更优的方法.
1.2 极弱磁场测量方法磁测卫星在磁强计安装位置产生的剩磁场很小,一般可控制到 < 1 nT;由卫星状态变化引起的剩磁场变化量更小,一般可控制到 < 0.5 nT.由于试验场地存在环境磁场波动的干扰,此时很难准确测量卫星的剩磁场.由于磁强计安装在远离卫星本体的位置,而卫星本体的磁场干扰一般随着距离的三次方衰减,因此可测量卫星近场的磁场分布(选择合适距离,使此位置干扰磁场值达到几十nT),建立高精度的磁性模型,进而计算磁强计位置的剩磁场值.为获得卫星圆周的磁场分布,国内外都采用固定探测器、旋转卫星360°的方式,一般探测器布置在卫星水平中心面不同距离处.如图 1所示,为本文使用的另一种近场测量法示意图,传感器布置在同一中心距、不同高度位置处,这更有利于多磁偶极子方法建模(齐燕文,2005).

|
图 1 磁场测量示意图 Fig. 1 Schematic of magnetic field measurement |
卫星尺寸较大,磁强计即使通过伸杆远离卫星本体,在其安装位置也不会是一个很好的磁偶极子场,因此卫星可定义为多磁偶极子模型.多磁偶极子计算式为
|
(1) |
式中:μ0为真空磁导率,值为4π×10-7H·m-1;Mi为第i个偶极子磁矩;r为计算点位置;ri为第i个偶极子位置.
根据卫星圆周的磁场测量数据,采用反演算法,对磁矩Mi和位置ri进行优化,最终可得到符合精度要求的多磁偶极子模型.
下面简单介绍采用的反演算法原理,记3m维向量M为m个磁源的未知磁矩,3m维向量r为磁源的未知位置,3n维向量Bc为理论计算磁场值,3n维向量Bt为n个测量点的磁场测量值.则按照多磁偶极子模型(M, r),公式(1)由向量和矩阵形式表达则变换为

|
(2) |
其中G=G(r),它为3n×3m维矩阵.
定义e为

|
(3) |
定义磁场计算值和测量值的方差函数为

|
(4) |
模型参量M和r的优化值由函数C(M, r)的最小化原理确定.即磁矩优化要求为

|
(5) |
位置优化要求为
|
(6) |
下面给出位置优化和磁矩优化的计算式,假设Rk为经过k步优化后的磁偶极子位置向量,则第k+1步的磁偶极子位置向量的计算式为

|
(7) |
其中,J为e的Jacobi矩阵,λ为步长因子值,可以通过线性搜索算法获得.
计算获得第k+1步优化后的磁偶极子位置向量Rk+1后,根据公式(2)可计算获得第k+1步的G矩阵,则第k+1步的磁偶极子组合的磁矩向量计算式为

|
(8) |
通过磁矩优化和位置优化的双重多次叠代,可得到最优的多磁偶极子模型(M, r),最后将模型(M, r)的值代入公式(1)即可计算卫星远场任意位置的磁场值.
1.3 干扰磁场标定方法卫星在轨期间受到地磁场作用,在不同轨道位置其感应磁场会有明显变化.因此在地面就需要模拟轨道磁场环境,测量不同磁场环境下卫星干扰磁场的大小,并建立计算方程,求解卫星感应磁场、剩磁场系数.卫星在轨时可利用地面标定得到的方程式计算干扰磁场值,用于空间磁场测量数据修正,提高探测精度(Lühr et al., 2013).
为简化卫星磁场标定过程,使用尽量少的参数来描述标定方程,提高实用性,首先利用某型号卫星开展干扰磁场特性研究.试验坐标系定义为:卫星中心为坐标原点,地理正东为+X向,地理正南为+Y向,垂直向下指向地心为+Z向.建立Y向的标准磁场环境,其Y向的干扰磁场(剩磁场和感应磁场)值如表 1所示.需要注意的是,表中的外磁场严格按序号逐个建立,保证磁化过程确定.
|
|
表 1 磁场测量结果 Table 1 Results of magnetic field measurement |
将表 1中卫星在不同外磁场环境下产生的干扰磁场值作图,结果如图 2所示.可以看出卫星感应磁场在地磁场强度范围内和外磁场基本成线性关系.但在经历不同的磁化过程后,在零磁场环境下卫星的剩磁场有明显变化,变化量达到0.88 nT.

|
图 2 磁场测量结果 Fig. 2 Results of magnetic field measurement |
进一步的测试分析表明,剩磁场的变化主要由磁力矩器不同的磁化状态引起(磁力矩器正向断电后,存在一定的正向剩磁矩;负向断电后,存在一定的负向剩磁矩).因此提出干扰磁场计算模型,表达式为

|
(9) |
式中,A为感磁系数矩阵,BE为地磁场强度(卫星坐标系),B0为磁力矩器正向断电卫星剩磁向量,D为磁力矩器负向断电系数矩阵,I为磁力矩器负向断电单位向量.
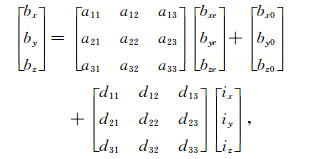
公式(9)展开形式为
|
(10) |
式中,X向磁力矩器负向断电时ix=1,正向断电时ix=0;Y向磁力矩器负向断电时iy=1,正向断电时iy=1;Z向磁力矩器负向断电时iz=1,正向断电时iz=1.
在大型磁环境模拟设备内,建立X、Y、Z方向的标准磁场和零磁场,并设置磁力矩器的不同断电状态,可标定出公式(10)的所有系数.
需要指出的是,零磁场环境下干扰磁场测量采用1.2小节介绍的方法,可有效提高测量精度.标准磁场环境下若卫星发生旋转,则感应磁场会跟随发生变化,这导致无法应用1.2小节的测量方法.这就要尽可能加大标准磁场强度,让感应磁场值变大,这样可以提高矩阵A的标定精度.
2 试验验证按照上文提出的方法,在我国CM2大型磁环境模拟设备中,对电磁监测卫星开展了干扰磁场标定,结果如表 2所示.其中±60000 nT的标准磁场环境下,磁强计位置干扰磁场为直接测量结果.在零磁场环境下,磁强计位置的干扰磁场通过近场测量、再由反演的多磁偶极子模型正演计算得到.
|
|
表 2 磁场标定结果 Table 2 Results of magnetic field calibration |
利用表 2结果求解公式(10)的系数,得到干扰磁场修正计算式为

|
(11) |
为评估公式(11)的准确性,设置5组磁场进行验证,结果如表 3所示,其中修正值由公式(11)计算得到.可以看出,实际测量值和修正值之间的偏差最大不超过0.26 nT,将卫星极弱的干扰磁场影响进一步降低一个量级.
|
|
表 3 试验验证结果 Table 3 Verification results |
我国以往搭载磁强计的卫星重点关注磁强计安装位置剩磁场的控制和测量,对于高磁洁净度要求的低轨磁测卫星,其磁场干扰情况更为复杂,仅仅关注剩磁场是不够的.本文提出基于感磁矩阵、剩磁向量、磁力矩器干扰矩阵的综合标定与修正方法,用以解决低轨磁测卫星复杂磁场干扰问题,并且通过优化方法将卫星磁场测量与标定最大误差从1 nT左右,提升到优于0.3 nT,这对于我国未来的高精度空间磁场探测任务具有十分重要的意义.
Chen S W. 2009. Control and measure of satellite magnetic cleanliness. Progress in Geophysics, 24(2): 797-800. DOI:10.3969/j.issn.1004-2903.2009.02.061 |
Feng Y, An Z C, Sun H, et al. 2010. Geomagnetic survey satellites. Progress in Geophysics, 25(6): 1947-1958. DOI:10.3969/j.issn.1004-2903.2010.06.009 |
Huang L, Jing W X. 2005. Research on time-sharing scheme for magnetometer and magnetorquer. Aerospace Control, 23(5): 37-41. |
Jia F L, Xu W, Li H N, et al. 2010. The study of control algorithm for spacecraft attitude control based on the combination of reaction wheels and magnetorque. Aerospace Control, 28(3): 16-19. |
Ludlam M, Angelopoulos V, Taylor E, et al. 2008. The THEMIS magnetic cleanliness program. Space Science Review, 141(1-4): 171-184. DOI:10.1007/s11214-008-9423-3 |
Lühr H, Yin F, Bock R. 2013. Magnetic properties of CHAMP and their effects on in-orbit calibration. Journal of Sensors and Sensor System, 2(1): 9-17. DOI:10.5194/jsss-2-9-2013 |
MohammedA M S, Boudjemai A, Chouraqui S, et al. 2006. Magnetorquer control for orbital manoeuvre of low earth orbit microsatellite. //Proceedings of the 5th WSEAS International Conference on Applied Computer Science. Hangzhou: WSEAS, 5: 944-947.
|
Narvaez P. 2004. The magnetostatic cleanliness program for the Cassini spacecraft. Space Science Review, 114(1-4): 385-394. DOI:10.1007/s11214-004-1433-1 |
Qi Y W. 2005. Space magnetic environment simulation technology. Spacecraft Environment Engineering, 22(1): 19-23. DOI:10.3969/j.issn.1673-1379.2005.01.004 |
Weikert S, Mehlem K, Wiegand A. 2012. Spacecraft magnetic cleanliness prediction and control. //2012 ESA Workshop on Aerospace EMC. Venice, Italy: IEEE.
|
Xiao Q, Zhang W B, Meng L F. 2016. Research on application of magnetorquerin magnetic cleanliness satellite platform. Journal of Astronautics, 37(2): 235-239. DOI:10.3873/j.issn.1000-1328.2016.02.015 |
Zheng Y H, Wang P. 2000. A new approach to control satellite attitude via magnetorquers. Journal of Astronautics, 21(3): 94-99. DOI:10.3321/j.issn:1000-1328.2000.03.016 |
Zhou B, Cheng B J, Zhang Y T, et al. 2014. Magnetic field detection method of China seismo-electromagnetic satellite. Chinese Journal of Space Science, 34(6): 843-848. DOI:10.11728/cjss2014.06.843 |
陈斯文. 2009. 卫星磁洁净的控制和测量. 地球物理学进展, 24(2): 797-800. DOI:10.3969/j.issn.1004-2903.2009.02.061 |
冯彦, 安振昌, 孙涵, 等. 2010. 地磁测量卫星. 地球物理学进展, 25(6): 1947-1958. DOI:10.3969/j.issn.1004-2903.2010.06.009 |
黄琳, 荆武兴. 2005. 关于磁强计与磁力矩器分时工作方案的研究. 航天控制, 23(5): 37-41. |
贾飞蕾, 徐伟, 李恒年, 等. 2010. 基于联合飞轮和磁力矩器的航天器姿态控制算法研究. 航天控制, 28(3): 16-19. |
齐燕文. 2005. 空间磁环境模拟技术. 航天器环境工程, 22(1): 19-23. DOI:10.3969/j.issn.1673-1379.2005.01.004 |
肖琦, 张文彬, 孟立飞. 2016. 磁力矩器在磁洁净卫星平台中的应用技术研究. 宇航学报, 37(2): 235-239. DOI:10.3873/j.issn.1000-1328.2016.02.015 |
郑育红, 王平. 2000. 一种用磁力矩器控制卫星姿态的新方法. 宇航学报, 21(3): 94-99. DOI:10.3321/j.issn:1000-1328.2000.03.016 |
周斌, 程炳钧, 张艺腾, 等. 2014. 电磁监测试验卫星矢量磁场探测方法. 空间科学学报, 34(6): 843-848. DOI:10.11728/cjss2014.06.843 |