 2017, Vol. 60
2017, Vol. 60


2. 中国科学院大学, 北京 100049
2. University of Chinese Academy of Sciences, Beijing 100049, China
精密单点定位 (PPP) 是20世纪90年代提出的一种新的定位技术,该技术只需要单个测站的观测数据,采用外部提供的高精度卫星轨道和钟差信息,严密地考虑各种GNSS测量误差并加以改正,即可在全球范围内获得厘米级的高精度测站绝对坐标 (Zumberge et al., 1997; Bisnath and Gao, 2009).该方法提出后,由于其高精度、高效率和灵活性被广泛地应用于精密定位领域.近年来,随着实时轨道和钟差解算技术的不断发展,实时PPP得以实现,并成功地应用于实时空间天气和地震监测与预警中 (张小红等, 2010; Li et al., 2013b, 2015a).
目前常用的PPP函数模型有“消电离层组合”、“UofC”和“非组合”三种.其中前两种模型均是基于消电离层组合观测值构建的,其差别在于是否引入“半和观测值”(Gao and Shen, 2002; 李博峰等, 2015).非组合模型是近年来提出的一种新的PPP函数模型,该模型基于原始伪距和载波相位观测值建立,除测站坐标、天顶对流层延迟、接收机钟差、相位模糊度等与另外两种模型相同的参数外,其待估参数还包含“受站星仪器偏差影响的电离层斜延迟”(张宝成等, 2011a, 2011b).非组合模型相对于传统消电离层组合模型的优势在于:(1) 直接使用原始载波相位和码观测值,避免了形成消电离层组合造成的3倍左右的观测噪声放大;(2) 避免形成消电离层组合,在未来的多频多模数据处理中更加灵活,可操作性更强;(3) 能够提供高精度的电离层斜延迟估计结果,为高精度电离层研究提供了更为可靠的观测值.
非组合PPP具有理论上的最优性、实施上的便利性、应用上的广泛性等优势,是当前GNSS精密定位领域的研究热点之一,相关学者已对非组合PPP算法与应用展开了研究,并取得了丰富的研究成果 (闫伟等,2011;章红平等,2013; Li et al., 2013a, 2015b; Tu et al., 2013; Zhang et al., 2013; 张小红等, 2013; Lou et al., 2016; Zhang, 2016).然而已有研究仍存在着不足,主要表现在:(1) 已有的非组合PPP研究主要是针对GPS系统,缺乏对BDS、GLONASS系统的研究,无法满足未来多模多频数据处理的需求. (2) 已有的BDS PPP模型中忽略了GEO卫星伪距长周期多路径效应产生的系统性偏差 (BGMB),其量级可达米级 (Wang et al., 2015),这会对定位性能产生不良影响. (3) 缺乏较为严密的GLONASS非组合PPP函数模型,GLONASS系统采用频分多址 (FDMA) 技术,由此产生了频间偏差 (IFB),频间偏差的处理是GLONASS数据处理的难点.研究表明,采用事先标定好的伪距IFB改正能够显著提高GLONASS消电离层组合PPP的收敛速度 (Shi et al., 2013);另一方面,按频率或卫星将伪距IFB作为待估参数进行估计则会引入过多参数,大大降低模型强度,甚至会引起秩亏,因此GLONASS PPP中常常忽略伪距IFB的影响,并对伪距进行降权处理 (Cai and Gao, 2013).
2014年,中俄两国进一步加强BDS和GLONASS系统联合与应用, 在此背景下,提升BDS和GLONASS系统联合定位的技术水平,并不断拓展新的应用领域,显得尤为迫切与必要.基于此,并充分考虑已有BDS/GLONASS非组合PPP研究的不足,本文提出了改进的BDS/GLONASS非组合PPP模型与算法.新模型在GPS非组合PPP模型的基础上,针对BDS和GLONASS系统各自的特点,考虑了BDS伪距BGMB和GLONASS伪距IFB的影响,并推导了满秩的函数模型和可估参数形式.采用实测数据对新模型与算法的正确性和有效性进行了验证,并对其定位性能进行了评估.
2 GPS非组合PPP函数模型GPS非组合观测方程为 (张宝成等, 2011a, 2011b):

|
(1) |
式 (1) 中ΔPr,fG,s[m]和ΔLr,fG,s[m]为接收机r到卫星s的原始伪距和载波相位观测值减计算值 (O-C),其中必要的改正 (潮汐效应、天线相位中心偏差与变化和相位缠绕等) 都已经加上;f为频段号,采用双频观测值时其取值为1或2;上标G表示GPS系统 (C表示BDS系统,R表示GLONASS系统,参考RINEX 3.02标准);erG,s表示卫星到接收机的单位向量;Δx[m]为测站坐标改正数;c[m·s-1]为光在真空中的速度;ΔtrG[s]和ΔtG,s[s]分别为接收机和卫星钟差;br,fG[s]和bfG,s[s]分别为接收机和卫星端的伪距硬件延迟;Ir, 1G,s[m]为卫星s频段1上的电离层斜延迟;μfG=(λfG,s/λ1G,s)2为电离层延迟与频率相关的系数,其中λfG,s[m]为卫星s频段f的波长;ZTDr[m]为测站天顶对流层延迟;mrG,s为卫星s对流层投影函数;Nr,fG,s为卫星s频段f上的相位模糊度,由于它吸收了接收机和卫星端的相位硬件延迟,所以是浮点数;εPG[m]和εLG[m]分别为伪距和相位观测值的观测噪声与其他未模型化误差之和.
由于国际GNSS服务组织 (International GNSS Service, IGS) 机构在求解卫星钟差时使用的是消电离层组合,因此最后发布的钟差产品中包含了伪距硬件延迟的无电离层组合 (Kouba and Héroux, 2001),即

|
(2) |
式 (2) 中

|
(3) |
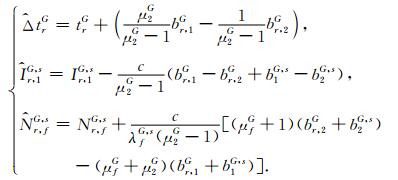
式 (3) 中带有^上标的符号表示重组之后的参数,其具体形式在相关文献中已有详细的推导 (张宝成等, 2011a, 2011b),这里不再重复推导,直接给出:
|
(4) |
从式 (4) 中可以看出,在GPS非组合PPP函数模型中,可估的接收机钟差中包含了接收机伪距硬件延迟的无电离层组合,电离层斜延迟中包含了站星差分码偏差 (Differential Code Bias, DCB),相位模糊度中除吸收了站星相位硬件延迟外,还吸收了站星伪距硬件延迟.GPS非组合PPP模型的待估参数包括测站坐标、天顶对流层延迟、接收机钟差、电离层斜延迟和相位模糊度.
3 BDS/GLONASS非组合PPP函数模型已有的GPS非组合PPP模型在理论上是严密的,但是由于BDS和GLONASS系统自身的特殊性,将现有的GPS非组合模型直接应用到BDS和GLONASS系统上是不严密的,主要表现在:(1) BDS系统GEO卫星存在显著的长周期伪距多路径效应,现有GPS模型中未考虑其造成的系统性偏差;(2) GLONASS采用FDMA技术,不同频率之间存在IFB,而GPS系统采用CDMA技术,所有卫星采用相同的频率,因此现有的GPS模型没有考虑到GLONASS系统存在的IFB.这些不严密性必然会对BDS/GLONASS非组合PPP的性能产生不良影响.
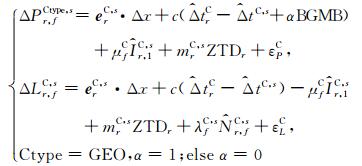
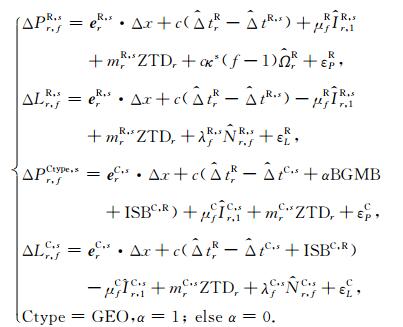
3.1 顾及伪距BGMB的BDS非组合PPP函数模型BDS系统与GPS系统相似,采用的都是CDMA技术,不同的是BDS系统星座由GEO、IGSO和MEO三类卫星构成,而GPS系统星座全部由MEO组成.由于GEO卫星与地球保持相对静止,其产生的近似恒定的伪距多路径效应不能类似于MEO和IGSO那样通过增加观测时段长度和多历元求平均的方法来修正,其对伪距的影响类似于长周期的系统性误差,这种系统性的误差会对BDS PPP的性能产生不良影响.在本文中,GEO卫星由于长周期多路径效应引起的系统性伪距偏差被当作参数来估计,用以抵偿和削弱其对BDS PPP造成的不良影响.基于此,并参考GPS非组合PPP模型,顾及伪距BGMB的BDS非组合PPP模型为:
|
(5) |
式 (5) 中Ctype表示不同类型BDS卫星,用以区分GEO、IGSO和MEO;BGMB为GEO卫星伪距长周期多路径效应引起的系统性伪距偏差;α为其系数,当卫星为GEO时设置BGMB参数;其他变量含义与式 (3) 中相同.从式 (5) 中可以看出,相比GPS,BDS非组合PPP模型中多出了一个伪距BGMB参数,模型强度会有所减弱,但是通过引入合理的动态模型 (如在一天内将其当作常数进行估计) 对BGMB的变化加以约束可以弥补这一不足.
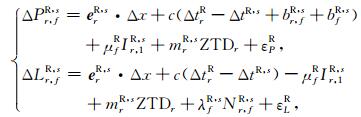
3.2 顾及伪距IFB的GLONASS非组合PPP函数模型与GPS和BDS系统不同的是,GLONASS系统采用FDMA技术,不同卫星信号的频率不同,导致其在接收机内部产生的通道延迟不一样,这种不同频率之间硬件延迟的差异称为IFB,分为伪距IFB和相位IFB.由于模糊度参数可以吸收相位上的硬件延迟,所以相位IFB在浮点解的情况下不会影响定位结果.研究表明,GLONASS伪距IFB可达25 ns (Kozlov et al., 2000;Defraigne and Baire, 2011),忽略这种量级的偏差会对GLONASS PPP的性能产生不良影响.线性化后的GLONASS非组合PPP观测方程为:
|
(6) |
式 (6) 中各变量含义与式 (1) 中相同,将两者对比可以发现,GLONASS观测方程中的伪距硬件延迟br, fR, s与卫星相关,而式 (1) GPS观测方程中br, fG则与卫星无关.处理GLONASS伪距IFB严密的做法是将其模型化为卫星或频率相关的偏差参数并同其他参数一起进行估计 (Defraigne and Baire, 2011; Shi et al., 2013; Chen et al., 2013; Li et al., 2015b),但这种方式会引入大量的参数,大大降低模型的强度,甚至会导致秩亏.另一方面,有研究表明GLONASS伪距硬件延迟与频率号存在近似的线性关系 (Reussner and Wanninger, 2011; Wanninger, 2012; Al-Shaery et al., 2013; Chen et al., 2013; Shi et al., 2013).考虑到伪距观测值在PPP数据处理中一般会给予较小的权重,本文中将GLONASS伪距硬件延迟模型化为频率号的线性函数:

|
(7) |
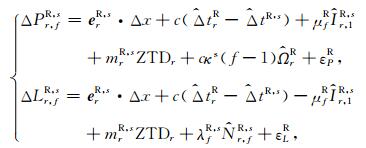
式 (7) 中κs为s卫星对应的频率号 (-7,-6,…,+6, 参考ICD 5.1),Ωr, fR为重新定义的频段f上的伪距IFB,br, fR为对应频段上频率号为0的卫星的伪距硬件延迟.将式 (7) 代入式 (6) 中,并参考GPS非组合模型推导过程中的参数重组方法,可得到如下GLONASS非组合函数模型:
|
(8) |
类似地,式 (8) 中带有^上标的符号表示重组之后的参数,其含义与式 (3) 中相同,其中

|
(9) |
从式 (9) 中可以看出,将GLONASS伪距IFB模型化为频率号的线性函数后,GLONASS非组合PPP模型的待估参数相对于GPS模型只增加了一个伪距IFB参数
基于3.1节和3.2节分别构建的BDS和GLONASS非组合PPP函数模型,可以进一步得到两个系统联合处理的模型:
|
(10) |
从式 (10) 中可以看出,BDS和GLONASS两系统联合处理时,GLONASS观测方程没有发生变化,只是将式 (5) BDS模型中的接收机钟差模型化为GLONASS接收机钟差和两者之间的系统偏差ISBC, R,其他参数的物理含义和可估形式均保持与之前建立的单系统模型一致.在BDS/GLONASS联合处理模型中,待估参数包括测站坐标、GLONASS接收机钟差、BDS与GLONASS的系统间偏差、BDS伪距BGMB、GLONASS伪距IFB、天顶对流层延迟、电离层斜延迟以及浮点相位模糊度,参数向量X表示为:

|
(11) |
式 (11) 中上标T表示卫星系统类型 (C或R).至此,BDS/GLONASS非组合PPP函数模型已经构建完成.
4 实验数据与处理策略为了验证本文提出的BDS/GLONASS非组合PPP函数模型的正确性和有效性,并在此基础上进一步测试其性能,选取了2015年年积日200~230共一个月的来自MGEX观测网络的11个跟踪站的数据进行处理.选取的测站分布如图 1,从中可以看出,所有测站都分布在亚太及印度洋周边地区,这是考虑到目前BDS系统主要覆盖这些地区,这些地区的GNSS跟踪站能够观测到足够数量的BDS卫星来保证BDS非组合PPP的实施与测试.

|
图 1 选取的MGEX测站分布 Fig. 1 Distribution of selected MGEX stations |
在BDS/GLONASS非组合PPP数据处理中,逐天逐测站采用最小二乘滤波对待估参数进行估计,具体实施时采用正向和反向滤波平滑得到最终结果 (崔希璋等,2009).另外,在数据处理中还使用了德国地学研究中心 (GFZ) 的精密卫星轨道/钟差产品 (Li et al., 2015b) 以及中国科学院测量与地球物理研究所 (IGG) 的多系统DCB产品 (Li et al., 2012; Yuan et al., 2015; Wang et al., 2016),其他与数据处理有关的模型、算法及策略见表 1.
|
|
表 1 BDS/GLONASS非组合PPP模型、算法及策略 Table 1 Models, algorithms and strategies of BDS/GLONASS uncombined PPP |
需要指出的是,在本文中,ISB、IFB和BGMB均当作天常数来估计,这样做的依据是:(1) 对于ISB,已有研究表明其在一天内的变化较小,为伪距噪声水平,在一天内当作常数来估计能够有效增加模型强度 (Chen et al., 2013; Li et al., 2015b). (2) 伪距IFB源于伪距硬件延迟,研究表明硬件延迟具有时间稳定性 (Sardónet al., 1994),将IFB当作天常数来估计是合理的,同时也能进一步增加模型强度. (3) 本文将伪距BGMB当作天常数来进行估计,但其时变特性需要进一步研究,本文研究表明,伪距BGMB在一天内的变化与伪距噪声水平相当,因此将其当作天常数来进行估计是合理的.
5 结果分析 5.1 BDS伪距BGMB及其对BDS非组合PPP的影响如前文所述,首先需验证将伪距BGMB当作天常数来进行估计的合理性.利用2015年年积日第215天的数据进行实验,实验中将式 (11) 中的ISBC, R和BGMB均当作白噪声来进行估计,用以考察在一天内BDS伪距BGMB是否具有类似ISB的稳定性.
图 2给出了各测站ISB和BGMB的估值时间序列,其中所有测站时间序列中均扣除了当天的均值,以更清楚地反映两者的时变特性.从图中可以看出,绝大多数测站ISB在一天内的变化维持在均值±1.0 ns以内,伪距BGMB的稳定性略差,但也基本上维持在均值±1.5 ns以内; 相对于ISB,BGMB时间序列较离散,噪声特征明显,这主要是由于BGMB是由伪距多路径效应产生,而ISB则主要是由伪距硬件延迟造成的.ISB和伪距BGMB在一天内的波动幅度都维持在伪距噪声水平,因此将它们当作常数来估计是合理的.

|
图 2 BDS/GLONASS ISB及BDS伪距BGMB时间序列 (2015年年积日215) Fig. 2 Time series of BDS/GLONASS ISB and BDS code BGMB (DOY 215, 2015) |
图 3给出了1个月内各天ISB和伪距BGMB估计结果均值的时间序列.从图 3a中可以看出,各测站BDS/GLONASS ISB的量级在几十个纳秒,这种量级的系统性偏差必须在定位中加以考虑,否则会导致PPP结果异常.KRGG站和NNOR站与其他测站的ISB存在明显的系统性差异,这是由于它们使用的接收机分别为LEICA GR10和SEPT POLARX4,而其他测站均为TRIMBLE NETR9,且ISB与接收机类型相关 (Chen et al., 2013).各测站一个月ISB时间序列具有十分相似的变化趋势,这是因为ISB估计结果还与PPP数据处理中使用的卫星钟差有关,不同天的卫星钟差产品引入的钟差基准不一样,这种基准变化会被吸收到所有测站的ISB中,进而表现出所有测站ISB具有相同的变化趋势,图 3a中第210天各测站ISB出现的约100 ns的跳跃则正好说明了这一点.从图 3b中可以看出,相比于ISB,BDS伪距BGMB在量级上则要小得多,但仍然能达到10 ns左右,在PPP中也应当加以考虑.不同于ISB,各测站伪距BGMB的变化没有相同的趋势,这是因为BGMB与测站周围的观测环境 (多路径效应) 有关.

|
图 3 BDS/GLONASS ISB及BDS伪距BGMB天均值时间序列 (2015年年积日200~230) Fig. 3 Time series of one-day mean BDS/GLONASS ISB and BDS code BGMB (DOY 200~230, 2015) |
图 4给出了第215天所有测站BDS非组合PPP定位误差RMS随时间的变化曲线 (前4个小时),分两种情况:考虑和不考虑伪距BGMB,处理时只采用向前滤波,用以评估伪距BGMB对BDS非组合PPP收敛速度的影响,其中图 4a为水平方向,图 4b为垂直方向.从图中可以看出,考虑伪距BGMB后,BDS非组合PPP的收敛速度在水平方向和垂直方向均有显著提高:不考虑BGMB时,水平方向收敛到0.4 m/0.2 m需要2.0 h/2.5 h; 而考虑BGMB时,对应收敛时间只需要1.5 h/2 h,分别提高了约25%和20%;另外,垂直方向的收敛速度也有类似水平方向的提高.表 2给出了两种情况下各测站伪距残差的平均RMS,从中可以看出,考虑伪距BGMB后,各测站的伪距残差均有不同程度的减小,平均约为19.7%,进一步证明了本文提出的BDS BGMB估计模型的正确性与有效性.

|
图 4 伪距BGMB对BDS非组合PPP收敛速度的影响 Fig. 4 Influences of code BGMB on convergence speed of BDS uncombined PPP |
|
|
表 2 伪距BGMB对BDS非组合PPP伪距残差的影响 Table 2 Influences of code BGMB on code residuals of BDS uncombined PPP |
类似地,采用第215天数据对所有测站进行GLONASS非组合PPP数据处理,也分为两种情况:考虑和不考虑伪距IFB,并对两种情况下的PPP收敛速度和伪距残差进行分析,以考察伪距IFB对GLONASS非组合PPP的影响及本文提出的伪距IFB线性模型的改进效果.
图 5为两种情况下所有测站GLONASS非组合PPP定位误差RMS随时间的变化曲线 (前4个小时),其中图 5a为水平方向,图 5b为垂直方向.从图中可以看出,相对于BDS系统 (图 4),GLONASS系统收敛速度要快得多,BDS收敛到1 dm需要3 h左右,而GLONASS则不到1 h,这是由于目前BDS星座主要覆盖亚太地区,单系统PPP几何强度不高,加之目前BDS系统卫星轨道和钟差精度均不如GLONASS系统 (Li et al., 2015b; Lou et al., 2016).采用本文提出的线性函数来模型化伪距IFB后,GLONASS PPP收敛速度在水平方向和垂直方向均有显著的提升:不考虑伪距IFB时,水平/垂直方向收敛至1 dm需要约57 min/56 min,而考虑IFB后,对应收敛时间为33 min/21 min, 分别提高了42%和62%.表 3给出了两种情况下各测站伪距残差的平均RMS,从中可以看出,考虑IFB后,所有测站伪距残差均有所减小,不同测站之间的差异较大,KRGG站减小了59.53%,而DJIG站和SIN1站则几乎没有变化,所有测站伪距残差RMS平均减少13.48%.收敛速度的提升和伪距残差的减小一方面表明了GLONASS伪距IFB对PPP收敛速度的不良影响和在PPP中考虑伪距IFB的必要性,另一方面也证明了本文提出的线性模型的正确性与有效性.

|
图 5 伪距IFB对GLONASS非组合PPP收敛速度的影响 Fig. 5 Influences of code IFB on convergence speed of GLONASS uncombined PPP |
|
|
表 3 伪距IFB对GLONASS非组合PPP伪距残差的影响 Table 3 Influences of code IFB on code residuals of GLONASS uncombined PPP |
图 6给出了一个月内所有测站BDS/GLONASS非组合PPP定位误差分布,同时给出了BDS和GLONASS单系统结果供比较分析.双系统联合定位误差RMS在北、东、高三个方向分别为6.9 mm、9.1 mm、19.3 mm.从图中可以看出,定位误差在垂直方向存在约2 cm的系统性偏差,造成这种系统性偏差的主要原因有:(1) 所选测站都能观测到绝大多数的BDS卫星 (为了确保BDS单系统PPP能够实施),在BDS/GLONASS PPP中BDS卫星数目一般大于GLONASS卫星数目,而目前BDS卫星轨道和钟差精度与GLONASS还有差距,尤其是GEO卫星,而本文在数据处理中对BDS系统和GLONASS系统给予了相同的权重,因此BDS会对定位结果造成不良的影响 (Lou et al., 2016),这种不良影响通过对比图 6中BDS和GLONASS单系统定位误差分布能够十分清楚的发现.(2) 目前还没有精确的BDS卫星相位中心改正参数,数据处理时接收机端的相位中心改正参数也认为与GPS系统一样,这会导致定位结果出现系统性偏差.图 7为各测站1个月定位误差RMS,其中大多数测站水平定位误差RMS在1 cm左右,垂直定位误差RMS在2 cm左右.

|
图 6 不同系统联合的非组合PPP定位误差分布 Fig. 6 Positioning error distribution of uncombined PPP with different system combinations |

|
图 7 各测站BDS/GLONASS非组合PPP定位误差RMS Fig. 7 RMS of BDS/GLONASS uncombined PPP positioning errors for all stations |
图 8给出了第215天所有测站BDS单系统、GLONASS单系统及BDS/GLONASS双系统非组合PPP定位误差RMS随时间的变化曲线 (前4个小时).从图中可以看出,GLONASS单系统和BDS/GLONASS双系统非组合PPP收敛速度在水平方向和垂直方向均要明显快于BDS单系统.双系统联合处理在水平方向的收敛速度要略快于GLONASS单系统,但提升不大,而在垂直方向的收敛速度却要略慢于GLONASS单系统,这主要是由于在等权重处理模式下BDS系统的不良影响造成的.从这个意义上来讲,在当前BDS系统轨道钟差精度还有待提升、相关精密改正参数还不完善的情况下,确定合理的BDS/GLONASS处理权重有待进一步研究.

|
图 8 不同系统联合的非组合PPP收敛速度 Fig. 8 Convergence speeds of uncombined PPP with different system combinations |
本文在GPS非组合PPP模型的基础上,针对已有BDS和GLONASS非组合PPP模型研究的不足,结合BDS和GLONASS系统各自的特点,提出了较为严密的BDS和GLONASS非组合PPP函数模型,并进一步构建了BDS/GLONASS联合处理的模型,该模型具有以下特点与创新:(1) 考虑了BDS伪距BGMB的影响,并将其当作待估参数进行估计;(2) 考虑了GLONASS伪距IFB的影响,将其模型化为频率号的线性函数,并在此条件下推导了满秩的函数模型及可估参数形式.利用一个月的实测数据验证了模型的正确性与有效性,结果表明:(1) BDS系统GEO卫星存在显著的由于长周期多路径效应引起的系统性伪距偏差,在非组合PPP中将其模型化为参数进行估计能够有效地提高收敛速度,并减少伪距残差;(2) GLONASS伪距IFB对非组合PPP收敛速度产生不良影响,采用本文提出的线性模型能够显著提高GLONASS单系统PPP的收敛速度,并减小伪距残差;(3) 本文提出的BDS/GLONASS非组合PPP模型与算法具有良好的定位性能.
本文的研究丰富了多系统非组合PPP的理论与方法,但总体上而言,目前多系统非组合PPP研究还比较有限,诸多问题,如多系统联合处理时各系统间权重的确定、更为严密与有效的GLONASS非组合PPP模型的建立、多系统非组合PPP模糊度固定及多系统非组合PPP在高精度电离层建模方面的应用等,都有待进一步研究,也是本文继续研究的方向.
致谢国际MGEX观测网络为本文提供了实验所用的多模GNSS数据,德国GFZ提供了精密卫星轨道和钟差产品,国际GNSS监测评估系统 (iGMAS) 及中国科学院测量与地球物理研究所GNSS分析中心提供了多系统DCB产品,在此一并表示感谢.
| Al-Shaery A, Zhang S C, Rizos C. 2013. An enhanced calibration method of GLONASS inter-channel bias for GNSS RTK. GPS Solut., 17(2): 165-173. DOI:10.1007/s10291-012-0269-5 | |
| Bisnath S, Gao Y. 2009. Current state of precise point positioning and future prospects and limitations.//Observing Our Changing Planet. Berlin Heidelberg:Springer, 615-623. | |
| Cai C S, Gao Y. 2013. Modeling and assessment of combined GPS/GLONASS precise point positioning. GPS Solut., 17(2): 223-236. DOI:10.1007/s10291-012-0273-9 | |
| Chen J P, Xiao P, Zhang Y Z, et al. 2013. GPS/GLONASS system bias estimation and application in GPS/GLONASS combined positioning.//China Satellite Navigation Conference (CSNC) 2013 Proceedings. Berlin Heidelberg:Springer, 323-333. | |
| Cui X Z, Yu Z C, Tao B Z, et al. Generalized Surveying Adjustment. (2nd ed). Wuhan: Wuhan University Press, 2009. | |
| Defraigne P, Baire Q. 2011. Combining GPS and GLONASS for time and frequency transfer. Advances in Space Research, 47(2): 265-275. DOI:10.1016/j.asr.2010.07.003 | |
| Gao Y, Shen X B. 2002. A new method for carrier-phase-based precise point positioning. Navigation, 49(2): 109-116. DOI:10.1002/navi.2002.49.issue-2 | |
| Kouba J, Héroux P. 2001. Precise point positioning using IGS orbit and clock products. GPS Solut., 5(2): 12-28. DOI:10.1007/PL00012883 | |
| Kozlov D, Tkachenko M, Tochilin A. 2000. Statistical characterization of hardware biases in GPS+GLONASS receivers.//Proceedings of ION GPS-2000. US Institution of Navigation Salt Lake City, Utah, 817-826. | |
| Li B F, Ge H B, Shen Y Z. 2015. Comparison of Ionosphere-free, Uofc and Uncombined PPP Observation Models. Acta Geodaetica et Cartographica Sinica , 44(7): 734-740. | |
| Li W, Teunissen P, Zhang B C, et al. 2013a. Precise point positioning using GPS and Compass observations.//China Satellite Navigation Conference (CSNC) 2013 Proceedings. Berlin Heidelberg:Springer, 367-378. | |
| Li X X, Ge M R, Zhang X H, et al. 2013b. Real-time high-rate co-seismic displacement from ambiguity-fixed precise point positioning:application to earthquake early warning. Geophys. Res. Lett., 40(2): 295-300. DOI:10.1002/grl.50138 | |
| Li X X, Zus F, Lu C X, et al. 2015a. Retrieving of atmospheric parameters from multi-GNSS in real time:Validation with water vapor radiometer and numerical weather model. J. Geophys. Res., 120(14): 7189-7204. | |
| Li X X, Ge M R, Dai X L, et al. 2015b. Accuracy and reliability of multi-GNSS real-time precise positioning:GPS, GLONASS, BeiDou, and Galileo. J. Geod., 89(6): 607-635. DOI:10.1007/s00190-015-0802-8 | |
| Li Z S, Yuan Y B, Li H, et al. 2012. Two-step method for the determination of the differential code biases of COMPASS satellites. J. Geod., 86(11): 1059-1076. DOI:10.1007/s00190-012-0565-4 | |
| Lou Y D, Zheng F, Gu S F, et al. 2016. Multi-GNSS precise point positioning with raw single-frequency and dual-frequency measurement models. GPS Solut., 20(4): 849-862. DOI:10.1007/s10291-015-0495-8 | |
| Reussner N, Wanninger L. 2011. GLONASS inter-frequency biases and their effects on RTK and PPP carrier phase ambiguity resolution.//Proceedings ION-GNSS-2011, Institute of Navigation. Portland, OR, 712-716. | |
| Sardón E, Rius A, Zarraoa N. 1994. Estimation of the transmitter and receiver differential biases and the ionospheric total electron content from Global Positioning System observations. Radio Science, 29(3): 577-586. DOI:10.1029/94RS00449 | |
| Shi C, Yi W T, Song W W, et al. 2013. GLONASS pseudorange inter-channel biases and their effects on combined GPS/GLONASS precise point positioning. GPS Solut., 17(4): 439-451. DOI:10.1007/s10291-013-0332-x | |
| Tu R, Ge M R, Zhang H P, et al. 2013. The realization and convergence analysis of combined PPP based on raw observation. Advances in Space Research, 52(1): 211-221. DOI:10.1016/j.asr.2013.03.005 | |
| Wang G X, de Jong K, Zhao Q L, et al. 2015. Multipath analysis of code measurements for BeiDou geostationary satellites. GPS Solut., 19(1): 129-139. DOI:10.1007/s10291-014-0374-8 | |
| Wang N B, Yuan Y B, Li Z S, et al. 2016. Determination of differential code biases with multi-GNSS observations. J. Geod., 90(3): 209-228. DOI:10.1007/s00190-015-0867-4 | |
| Wanninger L. 2012. Carrier-phase inter-frequency biases of GLONASS receivers. J. Geod., 86(2): 139-148. DOI:10.1007/s00190-011-0502-y | |
| Yan W, Yuan Y B, Ou J K, et al. 2011. Feasibility of precise timing with uncombined PPP. Geomatics and Information Science of Wuhan University , 36(6): 648-651. | |
| Yuan Y B, Li Z S, Wang N B, et al. 2015. Monitoring the ionosphere based on the Crustal Movement Observation Network of China. Geodesy and Geodynamics, 6(2): 73-80. DOI:10.1016/j.geog.2015.01.004 | |
| Zhang B C, Ou J K, Li Z S, et al. 2011a. Determination of ionospheric observables with precise point positioning. Chinese J. Geophys. , 54(4): 950-957. DOI:10.3969/j.issn.0001-5733.2011.04.009 | |
| Zhang B C, Ou J K, Yuan Y B, et al. 2011b. Calibration of Slant Total Electron Content and Satellite-receiver's Differential Code Biases with Uncombined Precise Point Positioning Technique. Acta Geodaetica et Cartographica Sinica , 40(4): 447-453. | |
| Zhang B C. 2016. Three methods to retrieve slant total electron content measurements from ground-based GPS receivers and performance assessment. Radio Science, 51(7): 972-988. DOI:10.1002/rds.v51.7 | |
| Zhang H P, Gao Z Z, Niu X J, et al. 2013. Research on GPS precise point positioning with un-differential and un-combined observations. Geomatics and Information Science of Wuhan University , 38(12): 1396-1399. | |
| Zhang H P, Gao Z Z, Ge M R, et al. 2013. On the convergence of ionospheric constrained precise point positioning (IC-PPP) based on undifferential uncombined raw GNSS observations. Sensors, 13(11): 15708-15725. DOI:10.3390/s131115708 | |
| Zhang X H, Li X X, Guo F, et al. 2010. Server-based real-time precise point positioning and its application. Chinese J. Geophys. , 53(6): 1308-1314. DOI:10.3969/j.issn.0001-5733.2010.06.009 | |
| Zhang X H, Zuo X, Li P. 2013. Mathematic model and performance comparison between ionosphere free combined and uncombined precise point positioning. Geomatics and Information Science of Wuhan University , 38(5): 561-565. | |
| Zumberge J F, Heflin M B, Jefferson D C, et al. 1997. Precise point positioning for the efficient and robust analysis of GPS data from large networks. J. Geophys. Res., 102(B3): 5005-5017. DOI:10.1029/96JB03860 | |
| 崔希璋, 於宗俦, 陶本藻, 等. 广义测量平差. (第二版). 武汉: 武汉大学出版社, 2009. | |
| 李博峰, 葛海波, 沈云中. 2015. 无电离层组合、Uofc和非组合精密单点定位观测模型比较. 测绘学报, 44(7): 734–740. | |
| 闫伟, 袁运斌, 欧吉坤, 等. 2011. 非组合精密单点定位算法精密授时的可行性研究. 武汉大学学报 (信息科学版), 36(6): 648–651. | |
| 张宝成, 欧吉坤, 李子申, 等. 2011a. 利用精密单点定位求解电离层延迟. 地球物理学报, 54(4): 950–957. DOI:10.3969/j.issn.0001-5733.2011.04.009 | |
| 张宝成, 欧吉坤, 袁运斌, 等. 2011b. 利用非组合精密单点定位技术确定斜向电离层总电子含量和站星差分码偏差. 测绘学报, 40(4): 447–453. | |
| 章红平, 高周正, 牛小骥, 等. 2013. GPS非差非组合精密单点定位算法研究. 武汉大学学报 (信息科学版), 38(12): 1396–1399. | |
| 张小红, 李星星, 郭斐, 等. 2010. 基于服务系统的实时精密单点定位技术及应用研究. 地球物理学报, 53(6): 1308–1314. DOI:10.3969/j.issn.0001-5733.2010.06.009 | |
| 张小红, 左翔, 李盼. 2013. 非组合与组合PPP模型比较及定位性能分析. 武汉大学学报 (信息科学版), 38(5): 561–565. | |