 2017, Vol. 60
2017, Vol. 60



2. 四川理工学院, 四川自贡 643000;
3. 地质灾害防治与地质环境保护国家重点实验室(成都理工大学), 成都 610059
2. Sichuan University of Science and Engineering, Sichuan Zigong 643000, China;
3. State Key Lab of Geohazard Prevention and Geoenviroment Protection (Chengdu University of Technology), Chengdu 610059, China
相比于其他的地表结构调查方法,如浅层折射法、面波勘探法、探地雷达法、高密度电法等,微测井方法具有更高的精度和效率,并且在起伏较大的复杂地表更为适用(查文锋和于小磊,2014).地面微测井通常采用垂直地震剖面测井方式(即微VSP),其通过获取地震波场信息在垂向的分布,研究地质构造变化情况.由于微VSP是在地质介质内部直接观测,因而可以避开或减弱剖面上部低速带的影响及周边环境的噪声干扰,从而更直接、更有效地研究地震波的传播特性和动力学特征(Hardage,1985;朱光明,1988;Sullivan et al., 2014;刘守伟等,2012).微测井技术已被广泛用于调查表层速度、地质构造勘查及隧道超前预报等领域,在油气勘探及地质勘查方面发挥了极为重要的作用(杜金玲等,2013;陈生昌等,2012;斯兴焱等,2012).
目前微测井仪器通常由常规浅震设备改装而成,通过井下检波器加浅层地震仪的方式进行微VSP的数据采集工作(董斌等,2011).三分量模拟检波器一般采用气压推动的方式完成与井壁推靠,同时还需要一根承担拉力的线缆完成检波器的上提或下放,每根探管的三分量检波器还需要6根数据线传输井下的震动信号,较多的线缆容易造成故障,影响系统的整体稳定性;由于采用气压推动方式,井下各级探管通常采用多个检波器直接串联的形式,以便于控制各级探管的推靠臂,但是这样也导致了各级探管难以拆卸,在野外复杂山地环境中,不易随机拆卸的各级探管会大大降低仪器的便携性,而且在井下相对复杂未知的环境中,气压管极易被损坏;另外三分量检波器在井中的三个分量随机分布,尤其是水平分量,并且每支检波器的分布状态也不尽相同(Naville et al., 2015;郑儒等, 2013;刘洋等,2008),因此检波器下井后,井上操作人员无法获取其状态信息(如方位及倾斜状态),因此难以确定较好的震源激发方位.
2 数字三分量地震微测井仪器设计针对目前常规微测井仪器的不足,分别利用MEMS传感器结合相应调理电路来设计数字检波器,从而提高仪器的采集质量和连接便利性;同时集成了姿态检测模块,快速获取检波器状态信息,便于确定震源激发方位,也为数据校正提供基础数据;设计中基于Ethernet-RS485构建了分布式总线网络,在提高数据传输可靠性的同时,改进了探管组合的任意性.
2.1 系统整体结构设计改进的系统包括数字检波器(内置于井下探管)、数据采集站、分布式数据传输网络、控制主机,具体如图 1.其中数字检波器用于实时采集地震信号和探管倾角及方位信息;数据采集站为暂存各级数字检波器上传的地震数据;分布式数据传输网络由RS485总线构成,负责检波器与采集站之间的相互通信;控制主机通过Wifi无线网络收集采集站暂存的数据,其可以是任意支持Wifi无线传输的控制终端.其中数据传输网络为了实现级联探管的可任意组合功能,采用了基于RS485的地址自适应的设计方法;井下探管的推靠装置采用了电机系统驱动,实现远程控制井下探管自动伸收臂功能,提高施工效率;控制主机以选择方式向各数字检波器发送配置指令和配置参数,并实时检测采集站的回传数据指令,接收回传的地震数据,并执行实时的波形显示、相关的预处理操作.这种模块化的设计方法,保证系统功能的多样性和兼容性,且具体更高的可靠性.

|
图 1 地震微测井系统框图 Fig. 1 Principle of seismograph micro-logging system |
数字检波器主要包括三分量MEMS传感器及标准信号源、信号调理电路、高分辨率24位A/D转换器、姿态检测模块、次级通信控制、直流电机控制检测单元、主控单元、电源管理等,具体如图 2. ①三分量MEMS传感器采用高灵敏度的MEMS加速度计实时采集人工震源产生的地震信号,标准信号源用于产生标准信号对后级电路进行测试,实现系统的自检测功能;②信号调理电路包括了放大、滤波、信号转换.其中程控放大器的输入偏置电压通常较大(如本系统所采用的PGA205为50 μV,也是当前最低的),为进一步降低调理系统的最小信号响应水平,调理前端先接入TL2652以10倍固定增益放大,再级联至两级PGA205,由此系统可响应最小信号为5 μV;抗混叠滤波电路采用低失真度放大器AD8551设计为二阶有源低通滤波器,以防止假频干扰;由于A/D转换器ADS1255的差分输入端电平要求必须为高电平,而地震信号为单端信号,因此电路中采用了AD8138构成单端转差分电路,其参考电压和ADC为同一参考电压源,以便将差分输出的信号两端抬至高电平以上;③高分辨率24位A/D转换器负责对模拟地震信号进行快速的数字化;④姿态检测模块主要用于快速的检测井下探管的水平和倾斜状态;⑤次级通信控制主要是协调各级RS485节点的数据传输,各个数字检波器的采集节点单元设计上是相互独立的,并由RS485接口并联接入RS485总线,同时为了改进RS485节点的地址自适应,加入了模拟开关控制次级链路节点的通断,即各级探管随机连接后再逐级分配地址;⑥直流电机控制检测用于控制数字检波器外部探管的推靠器,通过控制电机的正反转结合合理的机械结构实现推靠臂的伸展与收缩功能,同时利用电流检测起停电机;⑦主控单元不仅需要驱动控制可配置信号调理电路及A/D转换器,及时响应系统参数的调整以配置相应模块,还必须控制驱动以及实现数字检波器部分的RS485通信协议,保证数据和指令的正常高效传输,设计中采用了24位多驱动接口的ARM微控制器;⑧电源管理部分负责分配各单元模块的供电需求,同时也需要保证电源的稳定以及较低的纹波和噪声,以满足数据采集的高精度要求.

|
图 2 数字检波器内部框图 Fig. 2 Principle of digital geophone probe |
数据采集站主要用于响应同步指令并启动数据采集、以及暂存数据,其主要包括了同步触发单元、数据通信单元、扩展存储器、通信链路的逻辑控制单元,如图 3所示. ①同步触发单元负责响应外部同步采集指令.其在接收到外部锤击开关或遥爆装置的脉冲信号后,经衰减和施密特与非门进行门限判别,避免干扰的误启动,有效脉冲会直接触发主控制器外部中断,并立即通过向各级联数字检波器传输同步电平切换信号,以便同步启动各个数字检波器的数据采集功能;②数据通信单元包括了RS485、以太网及Wifi.其中R485主要用于各级探管之间以及探管与采集站之间的数据传输,以太网及Wifi则作为向控制主机上传数据的通信接口;③扩展存储器用于暂存各级检波器上传的地震数据,检波器直接上传数据到采集站的存储器,由采集站打包数据上传至控制主机,一方面提高传输效率,另一方面避免外部操作干扰采集工作;④通信链路的逻辑控制部分负责切换同步指令及数据传输功能.由于数据采集站与井下探管之间为四芯电缆连接,即两根电源线和两根RS485的差分信号线,如采用RS485发送同步指令的方式,同步采集的时延会较大,因此,设计中利用高速模拟开关复用了RS485的信号线作为同步信号的传输线,保证同步信号的实时性.

|
图 3 数据采集站框图 Fig. 3 Principle of data acquisition station |
为了提升整个系统的通信效率,设计中将各级探管数据通过RS485全部上传暂存至数据采集站,再由数据采集站通过以太网上传至控制主机,从而构成了高效的Ethernet-RS485分布式总线网络.RS485是采用平衡式发送、差分式接收的数据收发器来驱动总线(王书根等,2011),在工业应用场合中,较为广泛的组网方式是节点分配固定地址,由主机采用分时切换查询的方式逐次与各级节点进行通信(耿立中等,2008).本系统也充分利用RS485的这种多机通信机制,各级探管以RS485的从机形式并联在该总线上,从而构成分布式的数据传输系统.当然,此处的设计需要充分考虑到RS485在通信距离和速率的兼容性问题,即可靠的通信距离下尽量提高的其通信速率.在微VSP系统中,正常的通信距离要求在150 m左右,这里以16节探管为来计算,参数设置为24位A/D、采样率250 μs、采样长度为1024 ms,单节的数据量为12288个字节,即98.304 kb.为保障施工效率,RS485的速率应在2Mbps以上,这里采用高速全双工的ADM2582E来构建该网络,在保证通信速率的前提下增大通信距离,如图 4所示.

|
图 4 分布式RS485网络 Fig. 4 Distributed RS485 network |
同时为了满足微VSP的各级探管能够任意裁剪与扩展的需求,且单个探管的报废不影响系统的正常工作.而RS485的各个从机节点均需要分配固定的地址.为满足设计需求,强制RS485网络中各节点地址具有自适应性,这里通过控制连接至次级探管RS485差分信号线的方式来实现这一功能,即采用高速模拟开关控制实现RS485信号线A、B的软中断.组装连接的各级探管在系统启动之前不分配地址,且默认情况下模拟开关处于断开状态,即连接到次级探管的RS485信号线A、B默认是断开的.系统开机启动后主机首先分配第一级探管的通信地址,分配完成后由第一级探管控制模拟开关接通次级探管的RS485总线信号线,同时分配相应地址,以此方式递进完成整体系统中各级探管地址的分配.同时B线通过模拟开关接入外部中断接口,分配地址后临时用于响应锤击开关的同步脉冲.
2.5 系统主要技术参数(1) 系统理论最大可连接节点为255个(实际扩展时会受到同步脉冲传输延时的影响,从而影响仪器的同步性能);
(2) 最大采样率为30 kbps,0.0625 ms、0.125 ms、0.25 ms、0.5 ms、1 ms、2 ms多种采样率可选;
(3) 检波器输入动态范围大于120 dB;
(4) 浮点增益为0~36 dB可调;
(5) 频率响应范围0~800 Hz;
(6) 采用延时设置可在0~1000 ms内可选;
(7) 系统支持SEG-2、SEG-Y两种数据格式;
(8) 支持内、外触发,可用锤击开关、爆破、电火花触发以及断线或接通触发等多种方式;
(9) 井下探管的直径小于70 mm、长度小于550 mm、最大臂距150 mm;
(10) 整个仪器的操作温度在-25~60 ℃之间;
(11) 数据采集站功耗 < 10 W、数字检波器 < 8 W.
3 关键技术方法 3.1 随机三分量数据的校正由于井下数字检波器状态的随机性,水平分量的检波器相对于炮点至接收点的径向方向而言,会在2π范围内任意随机变化(Lawton and Bertram, 1993;Zeng and McMechan, 2006;Naville et al., 2015),因此需要采取有效的方法实现三分量数据的准确校正.当前国内外主要通过能量近似估算的方法(即利用三个分量资料的直达波能量)计算水平分量方位角(MacBeth et al., 1995;傅旦丹等,2003;Oye and Ellsworth, 2005;Pevzner et al., 2011;Grigoli et al., 2012),以此为基础进行旋转校正,这一方法在长期的海上三分量地震勘探中发挥了重要作用,也取得了比较好的效果,但不可否认其自身也存在两个固有问题:(1)利用校正前的测试数据近似估算方位角,再利用该方位角进行校正,测试数据本身就是未校正的,那么求取的方位角自身是有误差的,数据校正的真实性和精度值得商榷;(2)涉及大量的数据计算,复杂度较高,尤其是在当前大规模三分量勘探领域,应用上有一定限制.
因此,为提取三分量地震记录中标准的三个分量:垂直分量、径向分量和切向分量(本文所涉及的标准三分量是以锤击方位为基准的径向分量建立的),需要获取准确的水平分量检波器方位和倾角信息,对数据直接进行校正.同时兼顾井中检波器旋转的随机性,实时获取检波器的姿态信息,有助于选择合理的震源激发位置.设计中从硬件设计的角度出发来快速获取检波器的姿态信息,主要研究集成于检波器硬件中的方位检测技术和三分量校正技术,并借助OpenGL三维图形显示函数,完成检波器姿态检测的可视化.
3.1.1 姿态检测MEMS惯性传感器组检波器姿态检测的数字集成主要是检波器三个轴向上同轴连接MEMS惯性传感器组,以 惯性传感器为基础组合实现倾角与方位信息的快速测量,主要包括测量地磁分量的三 轴电子罗盘,测量倾角的三轴加速度传感器和对整个系统进行动态补偿的三轴陀螺仪 . MEMS惯性传感器组中电子罗盘可以感知地磁的大小,从而根据地磁的大小测出传感器 敏感轴的方位指向,但当电子罗盘倾斜或者受到地磁外强磁场干扰时,会影响其精度 ,造成测量结果的不准确(Chiang et al., 2015 );加速度传感器可以测量加速度的大小,当没有外界加速度时,测量的是地球的重 力加速度在其各个轴向的分量,通过各个分量的大小即可测出传感器组的相对于水平 面的倾斜角度,而通过计算出的倾斜角度,又可以对电子罗盘做相应的倾斜补偿(Bagalà et al., 2012).考虑到应用的场合,检波器固定时,能对加速度传感器造成影响的仅有地震传 感器接收到的地震波,可以通过陀螺仪对其补偿,得到需要的输出;陀螺仪可以测量 传感器沿其各个轴向的角速度( D'Alessandro and D′Anna,2014;Kratz et al., 2013 ),主要用于做动态补偿,考虑到地震检波器一般情况下处于静止状态,这里陀螺仪 主要起辅助作用.
3.1.2 检波器姿态检测方法(1) 坐标变换
为了得到检波器的方位角,设计中选用大地坐标系做参考,进而计算检波器与地理北方向的夹角.当检波器垂直放于井下时,检波器三个分量的轴向如图 5所示,图中,Xh, Yh, Zh为地磁在电子罗盘三个轴向上的分量,δ为磁偏角(地磁北和地理北的夹角),可以直接查出,因此,可以轻松地求出X轴与地理北的夹角,即方位角yaw(ψ),其范围是0~360°,则

|
图 5 电子罗盘三轴地磁分量分布(N为地理北,H为地磁在XY平面的分量,T为地磁总量) Fig. 5 Distribution of geomagnetic on compass (seismometer is tilt) (N is the geographic north, H is the geomagnetic component in the XY plane, T is the total geomagnetic) |
|
(1) |
当检波器略有倾斜(井斜或者由于井壁过软支撑臂的撑开导致检波器倾斜)时,检波器三个分量的轴向如图 5所示,由于此时电子罗盘也处于倾斜的状态,因此需要对电子罗盘进行倾斜补偿,具体方法如下.
图 5中检波器的位置可以看作是由虚线向实线有限次的旋转得到,每一次旋转相当于一次坐标变换,绕不同轴向选装对应的旋转矩阵分别为

|
(2) |
|
(3) |
|
(4) |
通过“aerospace rotation sequence”(航空旋转顺序),将重力的作用折算到加速度传感器的三个轴上,即
|
(5) |

|
(6) |
从而可以得到检波器上下方向上的俯仰角pitch(φ)、左右方向上的翻滚角roll(θ)和传感器倾斜方向为倾斜角(α)分别为
|
(7) |
式中,Ax,Ay,Az为加速度传感器三轴的输出,通过求得的俯仰角(φ)和翻滚角(θ)可以对电子罗盘进行φ倾斜补偿

|
(8) |
补偿后,传感器组X轴与正北方向的夹角仍可以用公式
(2) 数据融合算法
针对多MEMS惯性传感器的数据融合,目前比较常用的两种数据融合算法是互补滤波算法和扩展卡尔曼滤波算法,经过郭晓鸿等(2011)的研究和试验表明,在静止、无运动加速度、有运动加速度等条件下的实验,两种滤波算法均能对传感器所在载体的姿态给出在1°精度范围内的估计,不过当在载体自由运动时,扩展卡尔曼滤波的收敛速度要优于互补滤波(沈统等,2014;Carminati et al., 2012);可是在算法实现上,互补滤波只用修改截至频率便可以改变整个滤波器的特性,因而相对于扩展卡尔曼滤波算法,互补滤波算法的实现更为简单.考虑到实际应用中,检波器一般处于稳定的位置,不会有大的震动,而且采集单元还要执行大量的数据传输及预处理,因此采用占用系统资源少并且可以到达系统要求精度的互补滤波算法对传感器的数据进行融合(Kubelka and Reinstein, 2012;王书根等,2011;耿立中等,2008).
互补滤波器的原理框图如图 6所示.

|
图 6 互补滤波器示意图 Fig. 6 Schematic diagram of balance filter |
陀螺仪具有良好的动态特性,可以通过积分得到短时的姿态变化信息,但由于零点漂移和积分时间的误差,进行长时间姿态解算时,会产生累积误差.电子罗盘和加速度传感器的测量没有累积误差,但是其动态特性不好.从图中可以看出互补滤波器可以同时滤除高频和低频干扰,从而综合陀螺仪和电子罗盘与加速度传感器计算的角度得到滤波之后稳定的输出结果.
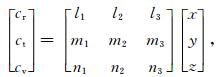
3.1.3 水平分量数据校正地震微测井数据采集时,检波器旋转校正示意图如图 7所示,主要是将水平分量数据校正到统一的震源激发方向.参考刘洋等(2008)提出的井中VSP定向方法,实际测试得到的检波器三个分量构成的直角坐标系c1、c2、c3,其中c3沿着检波器倾斜方向,c1、c2沿着检波器的倾斜平面随机取向,并且c1、c2相互垂直. x、y、z直角坐标系为大地坐标系,表示为:z轴铅垂向下,x轴与y轴垂直,并且俯仰角φ表示x轴到c1轴的夹角、翻滚角θ表示y轴到c2轴的夹角、倾斜角α表示z轴到c3轴的夹角.当然,为了充分利用设计中所直接测量的方位角信息,文中将各分量校准到以锤击方位为基准的坐标体系中,即以cr为基准,三分量检波器旋转定向后的直角坐标系cr、ct、cv定义为:cv轴铅垂向下(垂直分量), cr轴沿震源与检波器连线的水平方向(径向分量), ct轴垂直于过震源与检波器连线方向的铅垂面(切向分量).校正之前,VSP采集的三个分量的数据是在c1、c2、c3坐标系中,校正之后三分量的数据表示在直角坐标系cr、ct、cv中.具体校正算法如下所述.

|
图 7 检波器校正示意图 Fig. 7 The graph of calibration |
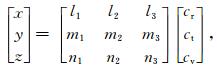
设VSP井中三分量检波器所记录的三分量分别为c1、c2、c3,将三分量旋转到x、y、z直角坐标系中可得到:

|
(9) |
x、y、z直角坐标系由三分量检波器校正之后的直角坐标系cr、ct、cv表示为:
|
(10) |
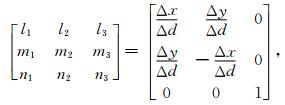
其中:
|

|
(11) |
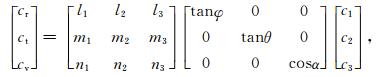
将式(3)代入(4)、式(4)代入式(5)可得:
|
(12) |
式(12)为三分量VSP检波器的校正算法关系式.当震源点位置和检波器位置确定时,震源与检波器连线方向是确定的,所以式(10)和式(11)中的参数矩阵都是确定的.三分量检波器的俯仰角、翻滚角和倾斜角也可由惯性传感器组直接读取,所以式(12)中的φ、θ和α也已知.
4 性能测试本文以遂宁某大型物探基地为测试平台.测试方法为:1)首先在指定的井下,按深度从1~15 m依次布置15只检波器;2)连续多次测试检波器检测的姿态信息,并记录下地质罗盘的方位信息;3)在不同的地方进行人工敲击触发采集并记录其波形数据; 4)对波形数据进行检波器的姿态校正.
4.1 方位测试文中采用标准的方位校准进行测试,姿态显示结果如图 8,显示了检波器的姿态信息.表 1显示在10°的倾斜范围内,惯性传感器的方位角输出和地质罗盘测量的方位角之间的对比.

|
图 8 检波器三维姿态显示效果 Fig. 8 3D gesture detector display |
|
|
表 1 方位精度测量 Table 1 Azimuth measurement precision |
从上述显示结果中可以看出,检波器的方位角精确度能保证在1°以内,足以满足后期校正处理的要求.
4.2 数据校正测试由于检波器的水平分量是随机的,因此在任意方位激发地震波,其记录的数据在理论上是各种属性地震波的组合,即无规律可循,但是利用文中所提出的方法,可以将该数据校正到统一的震源激发方向,以获取较为准确的水平分量数据.为验证本文设计的检波器姿态校正技术应用效果,将校正前的三分量水平分量数据校正前后进行对比分析.为便于分析,本文将系统接收到的结果进行抽道集处理,即每个分量单独显示.限于篇幅,这里仅给出左边1 m震源位置的抽取结果,如图 9所示.从图可以看出微测井采集数据的三个分量结果校正之后,波形数据的同相轴信息更为清晰,初至明显.

|
图 9 校正波形抽道集显示((a)为校正前;(b)为校正后) Fig. 9 Calibration waveform of trace gathering ((a) Pre-calibration; (b) Post-calibration) |
相对于模拟检波器,MEMS检波器具有更好的幅频响应特性(在有效频带范围内对信号基本无衰减)、其动态范围可达120 dB,因此更能有效记录反射至浅层低速带的微弱地震信号,同时其畸变值较低,非常适于复杂地质条件.为验证MEMS三分量检波器与模拟三分量检波器的测试效果,将自主开发的地震数据采集系统与模拟三分量检波器(采用Geometrics公司48道接收主机)在相同条件进行对比测试.测试方法仍采用井中测试的方式,利用同一触发信号和激发震源,两台仪器的采样率均为4 k,记录长度2048点(512 ms).本系统增益为1,模拟检波器为36 dB(64倍),采用横向锤击方式,偏移5 m激发,从井中26 m以3 m间距逐级测量,直至井口4.5 m.为便于分析,文中将检波器测试结果进行抽道集处理,限于篇幅,这里仅给出Z分量抽取结果,最终测试数据中各层位Z分量抽道集结果分别如图 10所示(图中2663~2719为仪器记录文件号).

|
图 10 对比测试波形((a)为数字检波器;(b)为模拟检波器) Fig. 10 Contrast test wave ((a) The digital geophone; (b) The analog geophone) |
分析检波器的对比测试波形,可以看出在14 m以下的测试波形相近,而在11 m至4.5 m的范围内模拟检波器的测试波形出现严重失真,无法识别初至波,而MEMS检波器的波形走势效果则比深层的采集效果更好,波形平滑,且初至波时间较为明显,综合来看MEMS检波器从浅至深采集的波形非常规则,Z分量抽道集效果明显优于模拟检波器,尤其初至波时间的定位.究其原因可能包括:①MEMS检波器具有更好的幅频特性和高动态范围,保证了其仍能清晰的记录浅层低速层的反射波信号,同时也进一步验证了MEMS检波器更适于微测井应用;②全数字的设计结构,可以有效降低现场环境中的环境噪声干扰;③模拟检波器的采集系统采样率较低,所以在低速层高频信号时容易产生信号失真;④模拟检波器的信号线之间会相互影响,极易引入串扰.
5 结论及展望结合三分量微测井地震资料采集需求,针对实际应用过程中的井下探管的方位随机、级联通信网络之间的故障影响等关键功能进行了改进.首先利用MEMS惯性传感器组合实现对三分量检波器的姿态检测,并针对多传感器的组合输出进行互补滤波的数据融合,为检波器的三个分量在校正处理时提供准确的参考值,文中结合三维空间坐标系(以锤击方位为基准)的转换给出了检波器中三个分量的校正公式,同时快速显示检波器三维姿态,有助于选取震源激发位置,从而提高施工效率及地震资料采集的质量.文中结合实际勘探工区验证了这一校正方式及算法的可行性,数据校正前后的对比效果也显示该方位能进一步提高地震资料解释的精度,较于传统方法,这一方法能根据真实数据反应真实的校正结果;同时,也与传统仪器进行了对比测试,测试结果也表明本系统在井下测试时效果优于传统设备.
致谢中国石油集团川庆钻探工程地球物理勘探公司秦自耕和许冠庆等提供的三分量VSP测井数据;中国地质大学邓明教授提出宝贵建议;匿名评审专家提供了参考建议和修改意见.在此一并致谢.
Bagalà F, Becker C, Cappello A, et al.
2012. Evaluation of accelerometer-based fall detection algorithms on real-world falls. PLoS One, 7(5).
|
|
Carminati M, Ferrari G, Grassetti R, et al.
2012. Real-time data fusion and MEMS sensors fault detection in an aircraft emergency attitude unit based on Kalman filtering. IEEE Sensors Journal, 12(10): 2984-2992.
DOI:10.1109/JSEN.2012.2204976 |
|
Chen S C, Wang H C, Chen L.
2012. A high efficient super-gather migration method for 3D VSP data. Chinese Journal of Geophysics, 55(1): 232-237.
DOI:10.6038/j.issn.0001-5733.2012.01.022 |
|
Chiang C Y, Jeng J T, Lai B L, et al.
2015. Tri-axis magnetometer with in-plane giant magnetoresistance sensors for compass application. Journal of Applied Physics, 117(17): 17A.
|
|
D'Alessandro A, D'Anna G.
2014. Retrieval of Ocean Bottom and Downhole Seismic sensors orientation using integrated MEMS gyroscope and direct rotation measurements. Advances in Geosciences, 40: 11-17.
DOI:10.5194/adgeo-40-11-2014 |
|
Dong B, Chen S J, Xin Y S.
2011. Test and comparison among the low velocity layer seismic instrument systems of GDZ48A, GDZ24A, NX-24 and R24. Petroleum Instruments, 25(3): 34-36.
|
|
Du J L, Cai Y T, Zhang G L, et al.
2013. VSP data application in reservoir prediction. Oil Geophysical Prospecting, 48(2): 268-272.
|
|
Fu D D, Liu Y F, Wen S L, et al.
2003. Orientation correction for horizontal components in marine multi-component seismic exploration. Geophysical Prospecting for Petroleum, 42(4): 460-463, 468.
|
|
Geng L Z, Wang P, Ma C, et al.
2008. Design and implement of RS485 high speed data communications protocol. Journal of Tsinghua University (Science and Technology), 48(8): 1311-1314.
|
|
Grigoli F, Cesca S, Dahm T, et al.
2012. A complex linear least-squares method to derive relative and absolute orientations of seismic sensors. Geophysical Journal International, 188(3): 1243-1254.
DOI:10.1111/gji.2012.188.issue-3 |
|
Guo X H, Yang Z, Chen Z, et al.
2011. Application of extended Kalman filter and complementary filter in attitude estimation. Transducer and Microsystem Technologies, 30(11): 149-152.
|
|
Hardage B A.
1985. Vertical seismic profiling. The Leading Edge, 4(11): 59-59.
DOI:10.1190/1.1487141 |
|
Kratz S, Rohs M, Essl G. 2013. Combining acceleration and gyroscope data for motion gesture recognition using classifiers with dimensionality constraints.//Proceedings of the 2013 International Conference on Intelligent User Interfaces. Santa Monica, California, USA: ACM: 173-178.
http://dl.acm.org/ft_gateway.cfm?id=2449419&ftid=1353281&dwn=1 |
|
Kubelka V, Reinstein M. 2012. Complementary filtering approach to orientation estimation using inertial sensors only.//2012 IEEE International Conference on Robotics and Automation (ICRA). Saint Paul, MN: IEEE, 599-605.
http://ieeexplore.ieee.org/xpls/abs_all.jsp?arnumber=6224564 |
|
Lawton D C, Bertram M B.
1993. Azimuthal responses of some three-component geophones. The Leading Edge, 12(11): 1118-1123.
DOI:10.1190/1.1436926 |
|
Liu S W, Wang H Z, Chen S C, et al.
2012. Joint imaging method of VSP upgoing and downgoing reflection wave. Chinese Journal of Geophysics, 55(9): 3126-3133.
DOI:10.6038/j.issn.0001-5733.2012.09.030 |
|
Liu Y, Wei X C, Zhao W, et al.
2008. Orientation method of 3-C geophone in incline well VSP. Oil Geophysical Prospecting, 43(1): 34-40.
|
|
MacBeth C, Zeng X W, Li X Y, et al.
1995. Multicomponent near-surface correction for land VSP data. Geophysical Journal International, 121(1): 301-315.
DOI:10.1111/gji.1995.121.issue-1 |
|
Naville C, Tavernetti R, Sweeney M, et al. 2015. Orientation of 3 component rig-source VSPs.//3rd EAGE Workshop on Borehole Geophysics. EAGE.
http://dx.doi.org/10.3997/2214-4609.201412278 |
|
Oye V, Ellsworth W L.
2005. Orientation of three-component geophones in the San Andreas fault observatory at depth pilot hole, Parkfield, California. Bulletin of the Seismological Society of America, 95(2): 751-758.
DOI:10.1785/0120040130 |
|
Pevzner R, Gurevich B, Urosevic M.
2011. Estimation of azimuthal anisotropy from VSP data using multicomponent S-wave velocity analysis. Geophysics, 76(5): D1-D9.
DOI:10.1190/geo2010-0290.1 |
|
Shen T, Tuo X G, Li H L, et al.
2014. Orientation method of 3C seismometer based on MEMS sensors. Instrument Technique and Sensor(10): 1-6.
|
|
Si X Y, Li L M, Xu L J, et al.
2012. 3D-VSP multiple velocity analysis method and its application. Geophysical Prospecting for Petroleum, 51(1): 56-64.
|
|
Sullivan E C, Hardage B, Strickland C, et al.
2014. Application of three-component VSP technology at seismically difficult sites: An example from the FutureGen 2.0 site, Morgan County, Illinois, USA. Energy Procedia, 63: 5051-5062.
DOI:10.1016/j.egypro.2014.11.535 |
|
Wang S G, Wang Z S, Liu X Y.
2011. Design and application of communication device for RS485 bus based on Modbus protocol. Automation & Instrumentation, 26(5): 25-28.
|
|
Zeng X X, McMechan G A.
2006. Two methods for determining geophone orientations from VSP data. Geophysics, 71(4): V87-V97.
DOI:10.1190/1.2208935 |
|
Zha W F, Yu X L.
2014. The optimal selection and comprehensive application of the static correction in the complex shallow surface structure areas. Progress in Geophysics, 29(2): 958-965.
DOI:10.6038/pg20140265 |
|
Zheng R, Jiang J M, Peng G Y.
2013. Orientation method of 3C well seismometer in VSP. Petroleum Geophysics, 11(1): 31-34.
|
|
Zhu G M. 1988.
Vertical Seismic Profiling. Beijing: Petroleum Industry Press.
|
|
陈生昌, 王汉闯, 陈林.
2012. 三维VSP数据高效偏移成像的超道集方法. 地球物理学报, 55(1): 232–237.
DOI:10.6038/j.issn.0001-5733.2012.01.022 |
|
董斌, 陈少军, 辛永胜.
2011. GDZ48A浅层地震仪与GDZ24A、NX-24、R24仪器的测试对比. 石油仪器, 25(3): 34–36.
|
|
杜金玲, 蔡银涛, 张固澜, 等.
2013. VSP资料在储层预测中的应用. 石油地球物理勘探, 48(2): 268–272.
|
|
傅旦丹, 刘一峰, 温书亮, 等.
2003. 海上多分量地震勘探水平分量方位校正. 石油物探, 42(4): 460–463, 468.
|
|
耿立中, 王鹏, 马骋, 等.
2008. RS485高速数据传输协议的设计与实现. 清华大学学报(自然科学版), 48(8): 1311–1314.
|
|
郭晓鸿, 杨中, 陈哲, 等.
2011. EKF和互补滤波器在飞行姿态确定中的应用. 传感器与微系统, 30(11): 149–152.
DOI:10.3969/j.issn.1000-9787.2011.11.045 |
|
刘守伟, 王华忠, 陈生昌, 等.
2012. VSP上下行反射波联合成像方法研究. 地球物理学报, 55(9): 3126–3133.
DOI:10.6038/j.issn.0001-5733.2012.09.030 |
|
刘洋, 魏修成, 赵伟, 等.
2008. 斜井VSP三分量检波器定向方法. 石油地球物理勘探, 43(1): 34–40.
|
|
沈统, 庹先国, 李怀良, 等.
2014. 基于MEMS传感器的三分量检波器定向方法. 仪器技术与传感器(10): 1–3, 6.
|
|
斯兴焱, 李录明, 胥良君, 等.
2012. 三维VSP多波速度分析方法及应用. 石油物探, 51(1): 56–64.
|
|
王书根, 王振松, 刘晓云.
2011. Modbus协议的RS485总线通讯机的设计及应用. 自动化与仪表, 26(5): 25–28.
|
|
查文锋, 于小磊.
2014. 浅表层结构复杂区静校正的优化选取及应用. 地球物理学进展, 29(2): 958–965.
DOI:10.6038/pg20140265 |
|
郑儒, 蒋健美, 彭光艳.
2013. VSP三分量检波器定向. 油气地球物理, 11(1): 31–34.
|
|
朱光明. 1988.
垂直地震剖面方法. 北京: 石油工业出版社.
|
|