 2016, Vol. 59
2016, Vol. 59


2. 中国科学院电磁辐射与探测技术重点实验室, 北京 100190;
3. 中国科学院大学, 北京 100049
2. Key Laboratory of Electromagnetic Radiation and Sensing Technology, Chinese Academy of Sciences, Beijing 100190, China;
3. University of Chinese Academy of Sciences, Beijing 100049, China
航空频率域电磁法以直升机、固定翼等作为飞行平台,可实现快速、经济、大面积的探测,目前已被广泛应用于近地表的地质环境普查、矿物勘探等领域.其中采用磁偶极子作为发射与接收装置的频率域电磁法的基本工作原理是:通过发射线圈产生单频或多频的一次磁场信号(即一次场);与大地或地下良导体作用产生感应涡流,进而产生相同频率的二次磁场信号(即二次场);系统通过接收线圈接收该二次场信号,可达到探测大地电性参数分布的目的.航空频率域电磁法仪器中较为常见的三种收发线圈架构分别为水平共面(Horizontal Coplanar,即HCP)、垂直共面(Vertical Coplanar,即VCP)、垂直共轴(Vertical Coaxial,即VCA).目前商业化的航空频率域电磁法仪器有加拿大Fugro公司的DIGHEM系统(Fraser, 1979, 1986)、RESOLVE系统(Cain,2004)以及美国Geophex公司的GEM-2A系统(Won et al., 2003)等.
依据航空频率域电磁法仪器的工作原理,在没有外部二次场输入、收发线圈位置固定的情况下,由接收线圈接收到的一次场可以理论算出,进而可以通过数据处理或者Bucking线圈(Won et al., 2003)消除掉接收线圈接收到的一次场值,实现系统输出为零.但由于收发线圈的位置偏差、接收线圈特性以及后续调理电路等因素的影响使得系统的输出不为零即为仪器偏置(Valleau,2000).一方面,该偏置的存在以及其所具有的随气压、温度、湿度等外部环境变化及收发线圈晃动影响而呈现的非线性变化特性,会导致相邻测线数据之间的不连续,出现“窗帘效应”的条带状零漂误差(Huang et al., 1999;Green,2003;李文杰,2007);无法实现对姿态误差的高精度校正(Yin et al., 2004;Fitterman et al., 2004);且反演得到的层状大地电导率、磁化率以及各层厚度等参数也会存在误差,以至于无法实现对海水深度及冰层厚度等的高精度探测(Haas et al., 2009;Reid and Bishop, 2004),因此需要对仪器偏置进行校正.另一方面,与时间域电磁法不同,频率域电磁法的一次场一直处于发射状态,且接收线圈接收到的二次场会受到外部环境如未知大地或良导体响应的影响,使得仪器偏置的校正实现起来较为困难.
对于地面频率域电磁法仪器而言,目前较为常用的仪器偏置校正方法主要有以下三种:在同一测量点处利用不同高度的测量值联合反演出仪器偏置(Sasaki et al., 2008;Minsley et al., 2014);将仪器抬至一定的高度直接测量得到仪器偏置(Mitsuhata and Imasato, 2009);采用标准的电阻率法仪器如直流电阻率法仪器实现对仪器偏置的校正(Deszcz et al., 1998;Minsley et al., 2012).航空频率域电磁法仪器偏置的校正可以采用相类似的校正方法,其中以将仪器抬至高空(如300 m)中直接测量仪器偏置的校正方法最为简单、方便、也较为常用.因此航空频率域电磁法常采用在测线飞行前后将仪器抬至高空中实现对仪器偏置的测量(Valleau,2000;Cain,2004),而飞行测量过程中的仪器偏置则可以通过线性插值方式获得,然后再通过调平的方式进一步消除“窗帘效应”的影响(Huang and Fraser, 1999;Green,2003;李文杰,2007).若仪器抬至的高度不够高,则不能完全消除未知大地及良导体的影响,使得测得的仪器偏置精度不高.另外上述传统的高空“零场值”标定方法还具有飞行难度大,飞行成本高,受外部环境(如测区海拔,温度,气压,湿度等)影响大,线性插值校正精度低等缺点.
已知航空频率域电磁法仪器在测线飞行的过程中,其姿态角发生变化是不可避免的.而仪器姿态角的变化,会对测量的二次场产生影响,需要对姿态角变化进行测量从而实现对二次场的姿态校正(Yin et al., 2004;Fraser and Hodges, 2007;嵇艳鞠等,2010;王琦等,2013;曲昕馨等,2014).另一方面,由磁通门传感器偏置的校正算法(Bracken et al., 2005;Pang et al., 2013)可知,磁通门的偏置不受其姿态角变化的影响,而频率域电磁法仪器与之类似.本文利用偏置与姿态角变化无关的特性以及三种常见线圈架构测得的二次场之间满足的等式关系,在航空频率域电磁法仪器测线飞行的过程中,通过测量仪器姿态角的变化信息实现对仪器偏置的实时校正.
2 层状大地正演模型及重叠偶极子模型航空频率域电磁法仪器的飞行平台以直升机最为常见,将电磁法仪悬挂于直升机的下方,如图 1所示.收发线圈沿x轴向分布,发射线圈的坐标为(0, 0, -h),接收线圈的坐标为(xr, yr, zr),其中h为频率域电磁法仪器距离地面的高度.

|
图 1 航空频率域电磁法仪器探测层状大地示意图 Fig. 1 Schematicdiagram of airborne frequency domain electromagnetic instrument detecting the layered earth |
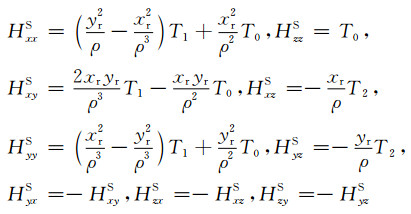
航空频率域电磁法仪器的收发线圈分别取xyz轴向,可以得到九种线圈架构(Tølbøll et al., 2007).在层状大地模型下,可相应地正演出九种线圈架构下二次场的张量矩阵HS(Ward and Hohmann, 1988;Yin et al., 2004):

|
(1) |
|
(2) |

|
(3) |
其中HabS分别对应于九种线圈架构在层状大地模型下求得的二次场,表示b轴向的发射,a轴向的接收,a, b∈{x, y, z};

|
(4) |
其中rTE为反射系数;

对于航空频率域电磁法仪器而言,其飞行高度h远大于收发距ρ,满足重叠偶极子模型(West and Macnae, 1991;Yin and Fraser, 2004;Fitterman et al., 2004;Fraser and Hodges, 2007),此时HCP、VCP以及VCA三种常见线圈架构下的二次场具有以下等式关系成立:

|
(5) |
航空频率域电磁法仪器在飞行探测的过程中其姿态角会发生变化,图 2所示为单个线圈姿态角的变化,线圈绕x轴旋转,产生摇摆角α;绕y轴旋转,产生俯仰角β;绕z轴旋转,产生偏航角γ.认为线圈在其姿态角未发生变化时处于参考坐标系(x, y, z)下,而发生姿态角旋转后,则处于线圈坐标系(x′, y′, z′)下.

|
图 2 线圈姿态旋转示意图 (a)摇摆旋转;(b)俯仰旋转;(c)偏航旋转. Fig. 2 The coil attitude rotation schematic (a) Swing rotation; (b) Pitch rotation; (c) Yaw rotation. |
在层状大地模型下,偏航角γ的变化对于二次场的测量没有影响,而摇摆角α,俯仰角β的变化则对二次场的测量影响较大,因此可以仅考虑α及β角变化的影响.由参考坐标系旋转为线圈坐标系,需要相应的姿态角旋转矩阵R.首先给出摇摆角α的旋转矩阵,即式(6),俯仰角β的旋转矩阵,即式(7),进而得到由摇摆角α,俯仰角β均发生变化时的旋转矩阵R,即式(8),且满足RT=R-1.
|
(6) |

|
(7) |

|
(8) |
由于收发线圈之间为硬连接,具有相同的姿态角变化.考虑二次场张量矩阵HS,收发线圈姿态角旋转矩阵R以及仪器偏置offset的影响,可得接收线圈接收到的二次场张量矩阵:

|
(9) |
对于以z轴发射,z轴接收的HCP线圈架构而言,其接收线圈测得的二次场为

|
(10) |
将式(5)代入,可进一步得到:

|
(11) |
若认为仪器姿态角变化前后,所测量的层状大地模型不变,即HzzS不变,且仪器偏置offset并不随着姿态角的变化而变化,可以通过式(11),利用仪器测线飞行过程中测量的姿态角变化信息实现对仪器偏置的高精度校正.具体的推导过程如下:
首先分别定义HxxS, HyyS与0.5HzzS的绝对误差Δexx, Δeyy:

|
(12) |
已知三种常见线圈架构下的二次场满足HxxS+HyyS=HzzS成立,则有Δexx=-Δeyy成立,可进一步得到HCP线圈架构在其姿态角发生变化前后任意两次测得的二次场值Hzzm1S及Hzzm2S:

|
(13) |

|
(14) |
由式(11)可知,忽略式(13),(14)中的误差项并联立,可求得仪器偏置offsetm:

|
(15) |
由实测仪器偏置offsetm与理论仪器偏置offset做差,可得到仪器偏置的绝对误差Δoffset:

|
(16) |
由式(16)可知,当α1=α2=α时,有Δoffset=2Δexxcos2α成立.而当β1=β2=β时,有Δoffset=-2Δexx/cos2β成立.即在一个参数(如α角)固定,另一个参数(如β角)取不同的值时,求出的仪器偏置值仅与固定的参数有关,而与变化的参数无关.需要指出的是,在采用式(15)求取仪器偏置时,应避免分母为零的情况发生,而推导得到的offsetm需要与HCP线圈架构下的一次场做比值才能得到仪器偏置的ppm值(×10-6).
4 模型仿真以Fugro公司的RESOLVE系统参数作为本文的模型仿真参数,其采用的HCP线圈架构收发距为7.9 m,飞行高度为30 m(Cain,2004).而RESOLVE系统中VCA线圈架构仪器偏置的求取与之类似(仅受俯仰角β影响),这里不再叙述.文中首先采用均匀大地模型分析了其他参数对仪器偏置校正精度的影响,并于文章最后采用三种常见的大地模型验证了本文仪器偏置校正方法的可行性.
4.1 三种线圈架构下的二次场利用VCA、VCP以及HCP线圈架构下求取的二次场实部、虚部分别与相应一次场的比值,可以得到相应线圈架构下同相分量(In-phase)与正交分量(Quadrature)的ppm值(×10-6)(Won et al., 2003),如图 3所示.

|
图 3 三种常用线圈架构下(a)同相分量与(b)正交分量随频率电导率乘积的变化 Fig. 3 The (a) In-phase and (b) Quadrature of three common coil configurations with the change of frequency-conductivity products |
由图 3可知,对于仪器发射频率与大地电导率的乘积(即频率电导率乘积fσ)较小时测得的二次场或VCA线圈架构测得的二次场而言,因其同相分量与正交分量值较小,仪器偏置的存在将严重限制大地电导率的反演精度.由于仪器的飞行高度h远大于其收发距ρ,满足重叠偶极子模型,此时VCA线圈架构得到的同相分量与正交分量为负值,且大小分别约为VCP线圈架构下同相分量与正交分量的1/2,HCP线圈架构下同相分量与正交分量的1/4(Frischknecht et al., 1991;Yin et al., 2004).
为进一步验证式(5)的正确性,式(12)中Δexx, Δeyy的实部、虚部分别与ΔHxx, ΔHyy的实部、虚部做比值,可分别求得Δexx, Δeyy实部、虚部的相对误差.在收发距固定不变的情况下,仪器高度在30~100 m之间变化,求得Δexx, Δeyy实部、虚部的相对误差,如图 4所示.

|
图 4 Δexx, Δeyy的相对误差:(a)Δexx实部;(b)Δexx虚部;(c)Δeyy实部;(d)Δeyy虚部. Fig. 4 The relative errors of Δexx, Δeyy in (a), (c) real parts and (b), (d) imaginary parts respectively |
由图 4可知,Δexx, Δeyy实部、虚部的相对误差受仪器高度以及频率电导率乘积变化的影响,且均随着高度的增大而减小,随着频率电导率乘积的增大而增大,幅度分别可以达到2.4%、4.1%.因此在满足重叠偶极子模型及5%的精度要求下,三种常见线圈架构下的二次场值满足关系等式即公式(5)成立.
4.2 偏置校正的误差分析由式(15)可知,单独由α角或β角变化,或α角、β角同时变化均可以实现对仪器偏置误差的测量.为进一步说明α角、β角的不同取值,对求取仪器偏置的影响.分析α角在-1~1 rad之间任意变化,β角取0、0.1、0.2、0.3 rad四个不同角度值时,β角的不同取值对求取仪器偏置测量的影响;类似地,分析β角由-1~1 rad之间任意变化,α角取0、0.1、0.2、0.3 rad四个不同角度值时,α角的不同取值对求取仪器偏置的影响.仪器偏置的大小在0.1~1000 ppm之间变化,系统采用的发射频率为10 kHz,而均匀大地模型的电阻率为50 Ωm即频率电导率乘积为200 Hz S/m.本文方法校正后仪器偏置的绝对误差,如图 5、图 6所示.

|
图 5 α角变化,β角取不同的值时,测得不同偏置(a)实部与(b)虚部的绝对误差 Fig. 5 The measured absolute errors of different bias (a) real parts and (b) imaginary parts with the change of α and specific value of β |

|
图 6 β角变化,α角取不同的值时,测得不同偏置(a)实部与(b)虚部的绝对误差 Fig. 6 The measured absolute errors of different bias (a) real parts and (b) imaginary parts with the change of β and specific value of α |
由图 5、图 6可知,本文方法校正后仪器偏置的绝对误差与偏置的大小无关,而与仪器所处的姿态角α、β有关.当采用α角单独变化求取仪器偏置时,β角越大,偏置实部与虚部的绝对误差越大,β角取0.3 rad时,偏置实部与虚部的绝对误差最大,分别为4.09 ppm,11.03 ppm;而当采用β角单独变化求取仪器偏置时,α角越大,偏置实部与虚部的绝对误差就越小,α角取零时,仪器偏置实部与虚部的绝对误差最大,分别为-3.74 ppm,-10.06 ppm.相较于α角单独变化求取仪器偏置,β角单独变化求取仪器偏置的绝对误差较小,这与式(16)的推导结果相吻合.
以下分析仪器偏置校正后的绝对误差对测量二次场的影响.在频率域电磁法仪器偏置实部与虚部均为100 ppm,频率电导率乘积在20 Hz S/m~2 MHz S/m间变化时,求得校正后仪器偏置实部与虚部的绝对误差.再与仪器HCP线圈架构下二次场HzzS的实部与虚部分别进行比值,得到校正后仪器偏置实部与虚部的相对误差值,如图 7、图 8所示.

|
图 7 α角单独变化,β角取不同的值时,不同频率电导率乘积下仪器偏置(a)实部与(b)虚部的相对误差 Fig. 7 Relative errors of bias (a) real parts and (b) imaginary parts with the change of frequency-conductivity products, α and specific values of β |

|
图 8 β角单独变化,α角取不同的值时,不同频率电导率乘积下仪器偏置(a)实部与(b)虚部的相对误差 Fig. 8 Relative errors of bias (a) real parts and (b) imaginary parts with the change of frequency-conductivity products, β and specific values of α |
由图 7、图 8可知,本文方法校正后频率域电磁法仪器偏置实部与虚部的相对误差均随着频率电导率乘积的增大而增大并逐渐趋于平稳.当采用α角单独变化求取仪器偏置时,β角越大,偏置实部与虚部的相对误差越大,分别可以达到2.84%,4.82%;而当采用β角单独变化求取仪器偏置时,α角越小,偏置实部与虚部的相对误差也越大,分别可以达到-2.59%,-4.40%,均满足反演大地电导率的精度要求.同样地,相较于α角单独变化求取仪器偏置,采用β角单独变化求取仪器偏置的相对误差较小.
4.3 与高空偏置校正的比较图 9所示为频率电导率乘积在20 Hz S/m~2 MHz S/m之间变化时,仪器在30 m常规飞行高度下,通过测量姿态角变化(β角取零值,α角单独变化)求得的仪器偏置值、将仪器抬至110 m高空测得的仪器偏置值与理论偏置值100 ppm的比较.从整个频率电导率乘积范围来看,在30 m处本文方法测得的仪器偏置精度接近于110 m高空测得的仪器偏置精度.具体地,在频率电导率乘积小于34.03 kHz S/m时,本文方法测得偏置实部的精度较高,在频率电导率乘积大于34.03 kHz S/m时,采用110 m高空测量偏置实部的精度较高;而在频率电导率乘积小于506 Hz S/m时,本文方法测得偏置虚部的精度较高,在频率电导率乘积大于506 Hz S/m时,采用110 m高空测量偏置虚部的精度较高.由式(16)、图 4、图 5、图 6的分析及高空偏置校正方法的原理可知,两种方法测得偏置的绝对误差值均与理论偏置大小无关,而与仪器所处的高度有关,且偏置精度均随着高度的增大而提高,经仿真可知仪器在60 m处采用本文方法测得的仪器偏置精度接近于340 m高空测得的仪器偏置精度.

|
图 9 理论偏置为100×10-6,30 m高度姿态变化与110 m高空测量偏置(a)实部与(b)虚部的对比 Fig. 9 Comparison of bias (a) real parts and (b) imaginary parts measured by attitude angle change at a height of 30 m and measured in a high altitude of 110 m, while theoretical bias is 100 ppm |
由于高空“零场值”偏置校正方法无法在测线飞行过程中实施,进而无法测得期间仪器偏置的非线性变化情况,若采用线性插值方式,偏置校正的精度会很低.与之不同,本文的方法可以实时测得仪器偏置的非线性变化,偏置校正具有较高的精度.在初始偏置实部与虚部均为100 ppm,频率电导率乘积为200 Hz S/m的情况下,若在测线飞行的20 min内仪器偏置受外部环境或收发线圈晃动影响而呈现幅度为10 ppm的非线性变化(以正弦变化为例),如图 10所示.可知在测线飞行的过程中不断地将仪器抬至190 m高空进行偏置校正,尽管可以反映出偏置的非线性变化,但在现实测量中不具备可操作性;在测线飞行前后采用190 m的高空标定方法测得的仪器偏置值相同,其实部与虚部分别为113.1 ppm、103.4 ppm,若采用线性插值的方式,该偏置值恒定不变,无法反映仪器偏置在飞行测量过程中的变化情况.而通过姿态角变化测得的仪器偏置则能够反映出这一变化,从而可以实现仪器偏置的高精度实时校正.

|
图 10 理论偏置正弦波变化时,30 m高度姿态变化与190 m高空测量的偏置(a)实部与(b)虚部对比 Fig. 10 Comparison of bias (a) real parts and (b) imaginary parts measured by attitude angle change at a height of 30 m and measured in a high altitude of 190 m, while theoretical bias varies in sine wave |
为进一步验证本文基于姿态变化求取仪器偏置的可行性.在发射频率为10 kHz的情况下,以下考虑三种常见的大地模型,在俯仰角β取不同值时,摇摆角α单独变化测得仪器偏置的相对误差,如图 11所示.其中K型的大地模型采用厚度分别为50 m、20 m,而电阻率分别为5、500 Ωm以及50 Ωm的三层大地模型;H型大地模型采用厚度分别为50、20 m,而电阻率分别为500、5 Ωm以及50 Ωm的三层大地模型;均匀大地模型电阻率为50 Ωm.可知,校正后三种常见大地模型的偏置相对误差均随着俯仰角的增大而增大,且均小于1.88%,验证了本文方法的可行性.

|
图 11 在三种常见大地模型下,测得的仪器偏置(a)实部与(b)虚部随俯仰角β变化的相对误差 Fig. 11 The measured relative errors of bias (a) real parts and (b) imaginary parts with the change of pitch β in three common earth models |
基于磁偶极子的航空频率域电磁法仪器在飞行测量的过程中由于仪器偏置的存在,且仪器偏置会随着外部环境以及收发线圈晃动的影响而发生变化,使得观测数据出现误差,因此需要对仪器偏置进行校正.本文基于仪器偏置与姿态角变化无关的特性,通过测量姿态角变化信息,在满足重叠偶极子模型的条件下,实现航空频率域电磁法仪器测线飞行过程中仪器偏置的实时高精度校正.本文分别求取了三种常用线圈架构下的二次场,并验证了在5%的精度要求条件下,满足相应的等式关系即公式(5)成立;再利用该等式关系,推导出公式(15),进而可以利用测得的仪器姿态角变化信息实现仪器偏置的测量,其绝对误差与仪器偏置的大小无关,而与仪器所处的姿态角、频率电导率乘积以及高度有关.文章最后采用三种常见的大地模型进一步验证了本文方法的可行性.针对HCP线圈架构下仪器偏置的求取,可知具有如下规律成立:
(1) 由摇摆角α单独变化求取仪器偏置时,仪器所处俯仰角β的值越大,求得仪器偏置的绝对误差与相对误差就越大;由俯仰角β单独变化求取仪器偏置时,仪器所处摇摆角α的值越小,求得仪器偏置的绝对误差与相对误差则越大,且采用俯仰角β单独变化求取仪器偏置的绝对误差与相对误差均较小;
(2) 当频率电导率乘积为200 Hz S/m时,校正后仪器偏置实部与虚部的绝对误差分别小于4.09 ppm,11.03 ppm;而频率电导率乘积在20 Hz S/m~2 MHz S/m之间变化时,校正后仪器偏置实部与虚部的绝对误差与所测量二次场的比值即相对误差均小于5%,满足反演大地电导率的精度要求.
(3) 频率电导率乘积在20 Hz S/m~2 MHz S/m间变化时,仪器在30 m常规飞行高度下,通过姿态角变化实时测得的仪器偏置精度接近于110 m高空中测得的偏置精度,且能够反映出飞行测量过程中仪器偏置的非线性变化,实现更高精度的实时偏置校正.
采用本文的仪器偏置校正方法及Yin等提出的姿态校正算法(Yin,2004;Fitterman and Yin, 2004)可以对三种常用线圈架构的航空频率域电磁法仪器,在飞行探测的过程中仪器偏置及姿态角变化所引起二次场误差的联合校正,也可以进一步提高姿态校正的精度.通过姿态角变化校正仪器偏置的算法简单,不仅减少了飞行的工作量,降低了飞行成本和飞行难度,而且还可以更加精确地实时获得飞行测量过程中仪器偏置的非线性变化值,提高航测数据的观测精度.
| Bracken R E, Smith D V, Brown P J, et al. 2005. Calibrating a tensor magnetic gradiometer using spin data. Scientific Investigations Report 2005-5045. Virginia State:US Geological Survey. | |
| Cain M J. 2004. Resolve survey for U.S. geological survey east poplar oil fields, Montana. Fugro Airborne Surveys Report #04034. Mississauga, Ontario:Fugro Airborne Surveys. | |
| Deszcz-Pan M, Fitterman D V, Labson V F. 1998. Reduction of inversion errors in helicopter EM data using auxiliary information. Exploration Geophysics , 29 (1-2) : 142-146. | |
| Fitterman D V, Yin C C. 2004. Effect of bird maneuver on frequency-domain helicopter EM response. Geophysics , 69 (5) : 1203-1215. DOI:10.1190/1.1801937 | |
| Fraser D C. 1979. The multicoil Ⅱ airborne electromagnetic system. Geophysics , 44 (8) : 1367-1394. DOI:10.1190/1.1441013 | |
| Fraser D C. 1986. Dighem resistivity techniques in airborne electromagnetic mapping. Airborne resistivity mapping.//Palacky G J ed. Airborne Resistivity Mapping. Canada:Geological Survey of Canada, 86-22. | |
| Fraser D C, Hodges G. 2007. Induction-response functions for frequency-domain electromagnetic mapping system for airborne and ground configurations. Geophysics , 72 (2) : F35-F44. DOI:10.1190/1.2405845 | |
| Frischknecht F C, Labson V F, Spies B R, et al. 1991. Profiling methods using small sources.//Nabighian M N ed. Electromagnetic Methods in Applied Geophysics. Tulsa:Society of Exploration Geophysicists, 105-270. | |
| Green A. 2003. Correcting drift errors in HEM data.//ASEG 16th Geophysical Conference and Exhibition. ASEG Extended Abstracts, 2:1. | |
| Haas C, Lobach J, Hendricks S, et al. 2009. Helicopter-borne measurements of sea ice thickness, using a small and lightweight, digital EM system. Journal of Applied Geophysics , 67 (3) : 234-241. DOI:10.1016/j.jappgeo.2008.05.005 | |
| Huang H P, Fraser D C. 1999. Airborne resistivity data leveling. Geophysics , 64 (2) : 378-385. DOI:10.1190/1.1444542 | |
| Ji Y J, Lin J, Guan S S, et al. 2010. Theoretical study of concentric loop coils attitude correction in helicopter-borne TEM. Chinese J. Geophys. , 53 (1) : 171-176. DOI:10.3969/j.issn.0001-5733.2010.01.019 | |
| Li W J. 2007. An automatic 2-D data leveling technique for frequency domain airborne electromagnetic survey. Journal of Chengdu University of Technology (Science & Technology Edition) , 34 (4) : 447-451. | |
| Minsley B J, Smith B D, Hammack R, et al. 2012. Calibration and filtering strategies for frequency domain electromagnetic data. Journal of Applied Geophysics , 80 : 56-66. DOI:10.1016/j.jappgeo.2012.01.008 | |
| Minsley B J, Kass M A, Hodges G, et al. 2014. Multielevation calibration of frequency-domain electromagnetic data. Geophysics , 79 (5) : E201-E216. DOI:10.1190/geo2013-0320.1 | |
| Mitsuhata Y, Imasato T. 2009. On-site bias noise correction in multi-frequency slingram-type electromagnetic induction measurements. Journal of Environmental & Engineering Geophysics , 14 (4) : 179-188. | |
| Pang H F, Li J, Chen D X, et al. 2013. Calibration of three-axis fluxgate magnetometers with nonlinear least square method. Measurement , 46 (4) : 1600-1606. DOI:10.1016/j.measurement.2012.11.001 | |
| Qu X X, Li T L, Wang F. 2014. A Study on the effect of bird's attitude on helicopter EM data and the correction method. Chinese J. Geophys. , 57 (4) : 1310-1321. DOI:10.6038/cjg20140428 | |
| Reid J E, Bishop J. 2004. Post-processing calibration of frequency-domain electromagnetic data for sea-ice thickness measurements. Exploration Geophysics , 35 (4) : 283-287. DOI:10.1071/EG04283 | |
| Sasaki Y, Son J S, Kim C, et al. 2008. Resistivity and offset error estimations for the small-loop electromagnetic method. Geophysics , 73 (3) : F91-F95. DOI:10.1190/1.2842044 | |
| Tølbøll R J, Christensen N B. 2007. Sensitivity functions of frequency-domain magnetic dipole-dipole systems. Geophysics , 72 (2) : F45-F56. DOI:10.1190/1.2409623 | |
| Valleau N C. 2000. HEM data processing-a practical overview. Exploration Geophysics , 31 (4) : 584-594. DOI:10.1071/EG00584 | |
| Wang Q, Lin J, Yu S B, et al. 2013. Study on influence and correction of coil attitude and bird swing for the fixed-wing time-domain electromagnetic system. Chinese J. Geophys. , 56 (11) : 3741-3750. DOI:10.6038/cjg20131115 | |
| Ward S H, Hohmann G W. 1988. Electromagnetic theory for geophysical applications.//Nabighian M N ed. Electromagnetic Methods in Applied Geophysics. Tulsa:Society of Exploration Geophysicists, 131-311. | |
| West G F, Macnae J C. 1991. Physics of the electromagnetic induction exploration method.//Nabighian M N ed. Electromagnetic Methods in Applied Geophysics-Applications, Part A and Part B. Tulsa:Society of Exploration Geophysicists, 5-45. | |
| Won I J, Oren A, Funak F. 2003. GEM-2A:a programmable broadband helicopter-towed electromagnetic sensor. Geophysics , 68 (6) : 1888-1895. DOI:10.1190/1.1635041 | |
| Yin C C, Fraser D C. 2004. Attitude corrections of helicopter EM data using a superposed dipole model. Geophysics , 69 (2) : 431-439. DOI:10.1190/1.1707063 | |
| 李文杰. 2007. 用于频率域航空电磁数据的二维自动调平. 成都理工大学学报(自然科学版) , 34 (4) : 447–451. | |
| 嵇艳鞠, 林君, 关珊珊, 等. 2010. 直升机航空TEM中心回线线圈姿态校正的理论研究. 地球物理学报 , 53 (1) : 171–176. DOI:10.3969/j.issn.0001-5733.2010.01.019 | |
| 曲昕馨, 李桐林, 王飞. 2014. 直升机吊舱姿态变化对电磁场测量的影响规律及其校正方法研究. 地球物理学报 , 57 (4) : 1310–1321. DOI:10.6038/cjg20140428 | |
| 王琦, 林君, 于生宝, 等. 2013. 固定翼航空电磁系统的线圈姿态及吊舱摆动影响研究与校正. 地球物理学报 , 56 (11) : 3741–3750. DOI:10.6038/cjg20131115 | |