 2012, Vol. 55
2012, Vol. 55


2. 中国地震局工程力学研究所,哈尔滨 150008
2. Institute of Engineering Mechanics, China Earthquake Administration, Harbin 150008,China
随着我国城市化建设进程的加快,大城市、特大城市不断涌现,城市中的高层、超高层建筑逐渐增多;另一方面,我国很多人口密集的大中城市都位于高地震活动性的地区,这都使得它们更易受到地震灾害的影响.近几年来全球发生的一系列破坏性地震---尤其2008年5月12日发生在我国四川的汶川8.0 级特大地震和2010 年4 月14 日青海玉树7.1级地震,都为我们敲响了警钟.如何才能有效地防御破坏性地震,减少地震造成的灾害损失,切实保障人民群众生命财产安全成为全社会关注的热点话题.“九五"、“十五"建设期间,国家投入大量资金建设了一大批地震观测台站,它们在这两次大地震中都发挥了重要的作用,但仍远不能满足社会公众的实际需求,仍有相当潜力可供挖掘.
地震预警是目前世界上公认的、能够充分利用现有地震监测台网资源减轻地震灾害的有效手段之一.地震预警系统利用电磁波传播速度远大于地震动传播速度的特性,在可能发生破坏性地震的地区周围布设一定密度的地震监测台站,因而当破坏性地震发生后很短时间内就可以由震中周围台站的记录对地震的规模和位置迅速做出判断,并在破坏性地震动到达之前,向周围可能遭受地震危害的区域发布警报.经过演练的民众接收到警报后就可以及时采取一些紧急逃生避险措施,最大程度地减少地震造成的人员伤亡,减轻地震引起的财产损失,最终达到有效抵御地震灾害的目的.
地震预警的构想最早是在1868年美国旧金山大地震后由J.D.Cooper[1]提出的.他设想在距旧金山100km 外、地震活动性很高的Hollister地区布设地震观测台站,那么一旦地震发生就可以利用电磁波传播时间与地震动传播时间之间的时间差,在震后很短时间内,及时敲响旧金山市议政厅里的警钟,从而人们就可以采取一些相应的紧急逃生避险措施,以减少地震造成的人员伤亡.随着计算机技术、数据传输处理技术、地震监测仪器以及地震观测方法的不断发展,Cooper[1]的这一设想正逐渐变为现实.过去20余年间,世界上多个地震频发的国家和地区都已建立起多个针对特定设施、单个城市甚至更大区域的地震预警系统,并在实际运行中取得了显著的减灾实效.如日本的紧急地震速报系统(http://www.jma.go.jp/jma/en/Activities/eew.html, Osamu[2-3])和日本铁路预警系统UrEDAS、美国ElarmS系统(http://www.elarms.org, Allenetal.[4-5])、墨西哥SAS 系统(A.Iglesias 等[6],http://www.geomuseum.com/ewc98/)、土耳其伊斯坦布尔的地震预警系统(IERREWS,M.Erdik等[7])、罗马尼亚布加勒斯特地震预警系统(http://www.infp.ro/publications/ews.html)、意大利地震预警系统(Zollo等[8-9])、以及我国台湾地区的地震预警系统(Hsiao等[10],Wu等[11])等.2008年汶川大地震发生后不久,日本宫城岩手县也发生了一次M7.2级地震,日本气象厅应用紧急地震速报系统提前12s向宫城石卷市发布地震警报,从而有效地减少了地震造成的人员伤亡和财产损失.而更著名的日本UrEDAS 系统也已多次成功发布地震预警信息,大大提高了日本新干线铁路运行的可靠性.这些预警系统的成功经验也使人们看到利用地震预警系统减轻地震灾害的希望.因此,尽早建立我国地震预警系统是一项十分有意义的工作.我国学者长期以来也一直采取多种手段在对地震预警技术进行追踪研究[12-16],首都圈、福建等地区也都已建立了实验性地震预警系统,针对这些预警系统的研究也正在进行中.
地震定位是地震学中的基本问题之一,也是地震预警系统中必须首先解决的关键问题之一.地震预警定位结果的速度和质量将直接影响到地震预警系统的成败.由于地震预警对于信息高度时效性要求,地震预警定位中可用的信息十分有限,往往只有震中附近少数几个台站触发.因此,常规地震定位方法并不适用于地震预警.可以说,地震预警是一种“超级地震速报",因此必须发展一套准确、稳定、可靠的地震预警实时定位方法.
国际上实时地震定位技术的研究开始较早,也取得了相当好的进展,提出了很多实用的实时定位方法.Anderson(1981)[17]最早提出了一种根据台站到时顺序进行实时地震定位的算法,Rosenberger(2009)[18]发展深化了该算法,并对其重新进行研究,研究结果表明该算法具有一定的精度,但对触发台站的相对顺序有较高要求;Kanamori[19]于1993年提出采用地震动幅值衰减进行实时定位的算法,但由于定位结果较为粗略,因而并没有在实时预警系统中应用;而HuaweiZhou[20]于1994 年提出的主站法(MasterStation)思想也影响了很多人,后来的很多研究都是借鉴了他的方法;日本紧急地震速报系统中的地震定位则采用了Odaka等(2003)[21]提出的B-Δ 方法,即对P波初始阶段波形求取包络函数,并采用包络函数中参数B与震中距Δ 的经验统计关系来估计震中;Rydelek等(2004)[22]提出“双台子阵"(Two-StationSubarray)的概念并将其应用于地震预警定位研究中,他们认为相对于精确的定位结果而言,节省定位用时更为重要,这实际上也是考虑了定位精度与定位用时之间的平衡;Horiuchi(2005)[23]提出的“着未着"方法则更为奇特,这种方法不仅充分利用已到台的信息,也恰当地考虑未到台对定位结果的约束,还能排除一些错误触发的信息,因而可以得到可靠的定位结果;Sariano 等(2008)[24]借鉴Horiuchi的方法并结合概率密度函数,认为将定位结果看做一个概率密度分布更为合适,只给出概率最大的点作为参考震中位置;马强(2008)[25]在他的博士论文中对预警定位方法也进行了一些研究,主要采用了Voronoi图、Delaunay三角剖分、台站方位角以及双台双曲线方法,定位结果也有很好的精度.
本研究在借鉴了上述预警定位方法基础上,从首台触发开始逐渐将可能的震中区域缩小,实现了预警定位过程的连续过渡.本文还从地震动传播的基本规律出发,推导了一套利用前三个触发台站的到时信息的简明预警定位公式.本文选用福建台网记录对该方法进行测试验证,测试结果表明本文推导的定位公式具有一定的可靠性和适应性,因此可以用于地震预警定位.
2 利用首个触发台站信息的地震预警定位为满足地震预警系统对于信息的高度时效性要求,从首个地震观测台站触发开始就必须对可能的震中区域做出一些判断,以便及时对可能的震灾情况进行估计,尽早地向可能遭受地震破坏的地区发布警报,满足广大人民群众的实际需求.如图 1所示的一个地震观测台网(图中三角形表示观测台站所在位置,X、Y坐标只表示相对位置),如果各个观测台站都在正常运转(没有台站停止工作或工作异常),或是异常台站可以预先获知,那么事先就可以采用Voronoi剖分方法[17]对该台网各观测台站的职守区域进行划分,如图 1所示.换言之,若该区域内波速是均匀的,如果台网中某个台站是首个触发台站,那么震中只可能位于该台站职守区域以内,而绝不可能超出该区域.

|
图 1 观测台站及其Vomnoi剖分示意图 Fig. 1 Schematic diagram of monitoring stations and Voronoi subdivision |
如果观测台网内某一地点发生一次足够大的地震(图 2a中五角星位置,暂时不考虑震源深度),那么,在首个台站触发之前,由现有观测记录是无法对地震进行定位的(如图 2a,图中黑色圆圈表示该地震的P波波前面).而一旦首个台站触发,那么就可以根据Voronoi剖分图确定可能的震中所处范围,即首个触发台站的职守区域,如图 2b所示.此时就可以对震中做出粗略的判断,本文将该区域的形心位置确定为首次定位震中.也有学者将首个触发台站所在位置确定为首次定位震中[15],显然这两种定义方法所确定的震中与真实震中之间可能都有着不小的差距,但由于此时没有更多信息可供利用,因此本文认为这两种定义方法都是合理可行的.随着时间进程的继续(第二个台站尚未触发之前),首个触发台站的职守区域会逐渐缩小,即首个台站的值守区域内不满足触发条件的一部分面积会逐渐被排除,此时震中只可能位于剩下的这些区域范围内,同样定义此时所剩区域的形心为参考震中位置(如图 2c所示).

|
图 2 单台预警定位示意图 (a)台站都未触发时;(b)首个台站触发及其Voronoi职守区域;(c)第二台尚未触发前首个触发台站Voronoi控制区域逐渐缩小. Fig. 2 Schematic diagram of single station location method (a) Stations did not triggered yet; (b) First station triggered and its; Voronoi control zone; (c) Voronoi zone gradually reduced over time before the second station triggered. |
Voronoi剖分图的边界线最初是直线段,即相邻两个台站连线的垂直平分线,但随着时间进程的继续,这些边界线逐渐演变为双曲线.如图 3 所示,假设震中位于(x,y),首个触发台站坐标为(xs1,ys1),与它相邻的另一个台站坐标为(xs2,xs2),震源深度为h,P波速度为Vp, 当前时间距首台触发Δt,此时Voronoi图的边界线方程可写为

|
(1) |
当Δt=0时,(1)式即为两台间的垂直平分线方程(即Voronoi剖分图边界线);当Δt>0 时,(1)式则变为以这两台站为焦点、与Δt相关的双曲线方程中的一支(开口朝向首个触发台站).第二个台站触发之前,随着Δt的增加,双曲线将逐渐靠近首个触发台站.

|
图 3 首个触发台站与相邻台站的边界线方程推导 Fig. 3 Derivation of the boundary line equation between the tirst triggered station and an adjacent station |
上述定位过程中忽略了由于线路传输或者其他原因可能造成的到时信息延迟.为弥补定位过程中的这些缺陷,保证定位结果的质量,本研究根据台网运行现状将等待时间选为1s, 即允许触发延时误差小于1s的区域存在,一旦首个触发台站判定出现错误就立即根据新的首个触发台站重新对预警定位结果进行更新,充分保证定位结果的可靠性,这也使本文定位方法具备了一定的稳健性.以下连续定位过程中作者都采取了相同的处理策略,不再赘述.
3 利用前两个触发台站信息的地震预警定位当第二个台站触发后,根据前两个触发台站的信息就可以进一步将可能的震中区域缩小,从而得到更加精确的地震定位结果,即根据前文的推导,此时震中只可能位于由这两台到时差确定的双曲线段上,双曲线的方程如式(1)所示,此时Δt即为这两台的P波到时差(图 4a).前文推导中忽略了震源深度的影响,式(1)实际上只表示震源深度为0km 时可能的震中位置.考虑不同震源深度,此时就能获得一簇双曲线段,即此时可能的震中只可能位于这簇双曲线段上.随着时间进程的继续,这簇双曲线段中有一部分区域也将因为与现有已知信息(触发顺序、等待时间)矛盾而逐渐被排除(图 4b),此时震中只可能是位于剩下的这些区域内.由于每条双曲线段都代表着一定的震源深度,因此在实际应用中就可以根据本地区最有可能的震源深度范围选择最合理的结果.例如在福建地区,震源深度大都处于0~30km之间[26],本研究据此在两台触发后进一步将震中限定在一个较小的范围内,并同样将该区域的形心定义为参考震中位置.同样选择将等待时间设置为1s, 充分保障定位结果的可靠性.

|
图 4 双台定位方法示意图 (a)第二个台站触发,震中只可能位于由前两台到时信息确定的双曲线段上;(b)第三台尚未触发前双曲线段逐渐缩短. Fig. 4 Schematic diagram of double station location method (a) When the second station triggered, hyperbolic segment that determined by the first two stations is the only possible position for the epicenter; (b) Before the third station triggered, the hyperbolic segment gradually shorten. |
当三个以上观测台站触发后,能够利用的信息更加丰富,此时就可以将可能的震中区域范围进一步缩小,定位结果也将更准确.本文从地震动传播基本规律出发,推导得到如下利用前三台P 波到时信息的地震预警定位公式.
公式推导采用如下局部坐标系(图 5),该坐标系以首个触发的台站S1 所在位置为坐标原点,连接首个触发台站S1 至第二个触发台站S2 的方向为局部坐标系的X轴正向,显然,满足右手定则的方向即为局部坐标系的Y轴正向.此时,前三个触发台站在这个局部坐标系内的位置坐标分别为(0,0),(d12,0),(x3,y3).d12,d23,d13分别表示台站两两间的台间距,即
|
(2) |

|
图 5 三台以上定位公式推导所采用的局部坐标系 Fig. 5 Local coordinate system used in location equation derivation when three or more stations triggered |
若震中位于五角星O(x,y)处,设震源深度为h,那么这三个台站的震中距Δi及震源距ri可分别表示如下:

|
(3) |
同样采用波速局部均匀化假定,假定P 波传播速度恒为Vp, 那么由地震动走时方程可以定义第二个、第三个触发台站与首个触发台站的震源距之差参数S21、S31:

|
(4) |
这两个参数的引入在本文定位公式推导中起到了关键的过渡作用.对(4)式进一步推导可得:

|
(5) |
将(3)式代入(5)式,容易得到

|
(6) |
对(6)式进一步进行分析,可以得到如下简洁方程:
|
(7) |
参数p1,p2,b1,b2 的表达式分别如下:

|
(8) |
即震中位置坐标可以写成与首个触发台站S1 的震源距r1 相关的参数方程,显然这是一个直线方程.这也说明由前三台P 波到时信息就可以将震中限制在一条有限长度的直线段上,即得到一条震中轨迹线,如式(9)所示.

|
(9) |
其中
|
(10) |
实际上,仅由前三台P 波到时信息并不能准确计算得到震源距r1,此时只能将可能的震中位置限制在一段直线段中.线段上的每个点都是可能的震中位置,但轨迹线上所有的点并不都是满足要求的,还要由一些其他条件进行限制,例如可能的触发顺序、走时差等.下文还将具体介绍本研究采用的定位步骤.
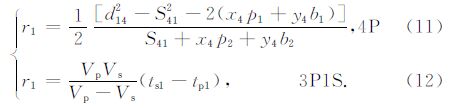
当捡拾到第四个触发台站P波到时信息(4P 情形)或是捡拾到首个触发台站的S 波到时信息(3P1S情形),那么参数r1 就可以计算得到,震中所在位置坐标因此也就可以求解得出.此时参数r1 的表达式分别为
|
式(11)、(12)中ts1为首个触发台站的S波到时,Vs为S波波速,参数d14,S41的定义与前文中参数d13,S31等类似.
得到的震中轨迹线方程(9)表面上看只是一条直线方程,实际上它却是一条空间曲线,已知信息中包含着对震源深度的约束.
由

|
(13) |
进一步可写为

|
(14) |
其中
|
(15) |
式(14)说明震中轨迹线上的每一点都对应着一定的深度.对于一个合理可靠的定位结果而言,震源深度参数也应该有比较合理的取值.因此,对于发生在福建地区的地震,本文只选取震中轨迹线上深度介于0~30km 的点作为可能的震中位置.同时,震中轨迹上的每个点也都会对应着一定的台站触发顺序.为更合理地考虑由于数据传输等原因造成的台站到时信息获取延时,作者设定以下判定准则,即认为震中轨迹线上所有理论计算得到的前五个触发台站中有三台与已知三台的相对触发顺序相同的区段都是可能的震中位置所在区段,这样也就能够进一步将可能的震中位置明确下来.
由于本文上述定位方程都是基于图 5所示的局部坐标系推导得到的,因此还需要进行一些坐标转换才能得到真正的震中位置坐标.由图 5可知:

|
(16) |
其中,x、y为求解得到的局部坐标系的坐标,xepc、yepc为经过转换后的真实震中位置坐标,xs1、ys1为首个触发台站的坐标,θ 为两坐标系间的夹角.
5 本文采用的预警定位步骤综上所述,本文采用如下步骤进行地震预警连续定位:
首先采用马强(2008)[22]提出的P 波震相实时捡拾算法捡拾P 波到时,当捡拾到第一个台站触发,即以该台站的Voronoi区域的形心位置作为初次定位震中,并选定一定的时间间隔(如0.5s)更新定位结果;当捡拾到第二个台站触发后,则改用双曲线段的中点作为参考震中,同样按照相同的时间间隔来更新定位结果;当捡拾到第三个台站的P 波触发信息后则改用本文推导公式将可能的震中位置限制于有限长度的一段震中轨迹线中,并在该轨迹线上搜索同时满足合理震源深度及触发顺序要求的区段,同样将该区段的中点定义为参考震中,并按照一定的时间间隔更新定位结果;当捡拾到第四个台站的P波触发信息或是捡拾到第一个触发台站的S波到时信息后,就可以根据本文推导得到的公式计算得到比较准确的震中结果.上述定位过程中,容许等待时间都设置为1s, 即容许理论触发时间与当前时刻误差小于1s的区域存在.
6 算例为验证本文方法的适用性和可靠性,作者收集了2000年1月至2008年12月间福建省地震监测台网记录到的网内45 次3.0 级以上地震、网缘(网外)100km 范围内23个3.0级以上地震(图 6a),并采用本文方法分别对这些地震进行连续地震预警定位.

|
图 6 本文所用地震分布及采用本文方法的定位结果与台网定位结果比较 (a)本文所用地震分布;(b)单台方法定位结果;(c)双台方法定位结果;(d)三台方法定位结果;(e)四台方法定位结果. Fig. 6 Earthquakes used in this rearch and comparisons of location results by using method suggest in this paper and network results (a) Earthquakes used rn this research; (b) The single station location results; (c) The double station location results; (d) The three station location results; (e) The four station location results. |
注意到,如果首个触发台站是位于监测台网边缘位置处的台站,那么采用本文方法进行单台、双台定位时,由于此时的Voronoi图、双曲线都得不到很好的限制(开口型或包括的区域面积较大),定位结果的准确度和可靠性显然得不到保证.因此本文建议当三个以上台站触发后再采用本文方法进行地震预警定位,这样才能够保证定位结果的可靠性.本文只选取图 6a中首个触发台站不是台网边缘处的震例进行单台、双台定位验证(共38次地震).
采用本文方法分别得到的预警定位结果及与台网定位结果的对比如图 6(b-e)所示.
图 7(a-f)分别为采用本文单台、双台、三台、四台定位方法的定位结果与台网实际定位结果的误差统计直方图.由这些统计结果中可以看出,对于发生于网内地区的地震(首个触发台站也不是网缘的台站),从首个台站触发开始,采用本文方法就能对震中位置很好地进行限制,本文所选38个震例的单台定位误差大都小于40km.当第二个台站触发后,采用本文双台定位方法将会对可能的震中位置进一步进行限制,此时定位误差都小于35km.当三个台站触发后,利用本文定位方程的定位结果也将更加准确.不仅对发生在网内的地震有较好的控制,对于发生在网外(缘)位置处的地震也能得到比较准确可靠的定位结果.此时,网内地震的定位误差大都小于15km, 网外地震的定位误差约为30km 左右.随着触发台站数目的增加,采用本文四台定位方法的定位结果的精度也将进一步提高.此时,网内地震的定位误差大于6km, 网外地震的定位误差也大都小于30km.

|
图 7 采用本文方法定位结果与台网定位结果误差统计 (a)、(b)分别为38个网内地震的单台、双台方法定位结果误差分布直方图;(c)、(e)分别为45个网内地震的三台、四台方法定位结果误差分布直方图;(d)、(f)分别为23个网外地震的三台、四台方法定位结果误差分布直方图. Fig. 7 Statistics of epicenter difference between location results of using our method and catalog results Histogram (a) and (b) shows the location errors of using the single and double station method of 38 inner-net earthquakes separately; Histogram (c) and (e) shows the location errors of using the three and four station method of 45 inner-net earthquakes separately; Histogram (d) and (f) shows the location errors of using the three and four station method of 23 outer-net earthquakes separately. |
由于地震预警系统对于信息的高度时效性要求,预警定位过程中可以利用的信息十分有限,因而必须合理地对已有信息进行组合利用,或者对定位结果质量进行定量评估,以便获取稳定可靠的地震定位结果.因此,对预警定位结果可能的误差分布情况进行分析是一项十分有意义的工作.根据定位误差分析结果就可以对预警定位结果的质量进行评估,也可以根据该分析结果在实际预警定位过程中选择误差更小的台站组合进行定位,还可以根据该分析结果对未来台网建设有针对性地提出一些合理化建议.同时,定位误差分析也使整个地震预警定位程序形成一个完善、完整的流程.
本文预警定位方法的定位误差有两部分构成:第一部分误差是由于信息欠缺引起的,即仅由前三个触发台站的信息并不足以计算得到确切的震中位置,而只能将其限制在有限长度的一段直线段中,本文将其称之为绝对误差;第二部分误差则是由于计算公式本身引起的,即由于震相捡拾等多方面因素的影响,不可避免地使公式中各个参数产生误差,最终使定位结果中产生误差,本文将其称之为相对误差.为了定量反映定位方法的稳定性和可靠性,对定位方程可能引起的相对误差分析如下:
由于首个触发台站的震源距表达式为

|
(17) |
那么,容易推导得到
|
(18) |
将(18)式带入定位公式(7)可得
|
(19) |
亦即

|
(20) |
若δ(S21)=δ(S31),即假定前三个触发台站的P波捡拾精度相同并忽略地震波速的不均匀变化,那么容易得到
|
(21) |
求解上述关于δx,δy的方程可得
|
(22) |
其中参数C1、C2 的表达式分别为
|
(23) |
定义定位误差半径如下:
|
(24) |
同理可以分别推导得到3P1S 情形和4P 情形时的定位误差半径计算公式.
3P1S情形时,定位误差半径为

|
(25) |
其中
|
(26) |
|
(27) |

|
(28) |
4P情形时,定位误差半径为

|
(29) |
其中

|
(30) |

|
(31) |

|
(32) |

|
(33) |

|
(34) |
由以上推导可知,误差半径rc 与δ(S21) 成正比,而实际应用中定位误差的大小也与震相捡拾的精度密切相关.因此,为消除采用不同P 波捡拾方法时捡拾精度间的差异,本研究选用如下无量纲参数Dc 来反映定位误差的相对大小,而不建议使用误差半径rc.
|
(35) |
根据上述理论分析结果,作者首先以0.01°为间隔对福建地区(115°E-120.5°E,23.5°N-28.5°N)进行网格化离散,随后假定每个网格点都发生一次地震,那么就可以计算得到误差半径rc 大小.本文据此分别得到了福建省地震观测台网现有条件下(41个观测台站)分别采用前三台、前四台到时信息的预警定位结果误差分布图(假定震源深度为10km),以及“十一五"建设完成后观测台网条件下(125个观测台站)的预警定位误差分布图,结果如图 8所示,图中蓝色三角形表示台站所在位置.

|
图 8 福建地区现有台网及“十一五"建设完成后新台网用于预警定位时的误差分布 (a),(c),(e)分别为现有台网3P、3P1S、4P方法定位误差分布;(b),(d),(f)分别为新台网3P、3P1S、4P方法定位误差分布. Fig. 8 EEW location error distributions under the existing seismic monitoring stations and after the "eleven-five" construction new seismic monitoring stations separately in Fujian region (a),(c),(e) shows distributions of the location errors by using the 3P ,3P1S,4P method under the existing stations separately; (b),(d),(f) shows distributions of the location errors by using the 3P,3P1S,4P method under the new stations separately. |
从图 8中可以看出:现有台网条件下,对于发生于省(网)内大部分区域的地震,采用本文3P、3P1S、4P预警定位方法时的定位结果误差都较小.换言之,对于发生在这些区域的地震,采用本文预警定位方法都能准确地得到可靠的定位结果.而对于发生在网外(缘)其他地区的地震,由于此时台站密度较低,定位结果的误差则普遍偏大,即对于发生在这些区域的地震,采用本文方法的定位结果的准确度有待进一步提高.
“十一五"建设完成后,台网内台站密度显著增加.此时,对于发生于省(网)内大部分区域的地震采用本文方法也能得到比较准确可靠的定位结果.同样,对于网外部分地区地震的定位精度也会得到比较明显的改善.显然,随着台站密度的增加,相同时间内触发台站的数量也会增多.但由于本文上述计算中只选用首先触发台站的信息,没有考虑时间性的影响,因此对比以上误差分析结果可以明显看出,新台网条件下某些区域的定位结果的精度不但没有得到改善反而降低了不少.此外,由式(8)可知,定位过程中要求p2≠0,而一旦p2=0或是接近于0时,定位结果的误差就会非常大.又由p2 的表达式可知,p2=0 时也就意味着首先触发的三个台站大致处于同一条直线段上,本文称之为“死局"情况,此时由本文计算公式无论如何都是不能计算得到震中位置的.随着台站密度的增加,出现上述“死局"情况的几率也会随之增加,这也是造成新台网条件下网内部分地区定位误差较大的原因之一.然而随着台网密度的增加,相同时间内可供利用的信息也将显著增加,因此根据本文上述分析结果就可以更合理地对已有的信息进行利用,从而大大提高预警定位结果的准确度和可靠度.由于忽略了波速结构等因素对定位结果的影响,本文相对误差除了与P 波震相捡拾精度密切相关外,很大程度上还受到使用台站相对位置的影响.此外,作者仅对定位结果水平误差分布情况进行了讨论,还没有涉及对定位结果深度误差的分析,因此从某种意义说本文误差分析结果还是十分粗略的.
9 结论本文首先简要总结了国内外地震预警定位研究中采用的一些方法,随后根据我国地震监测台网的实际情况提出了一整套完整的地震预警连续定位方法.首个台站触发后就可以根据Voronoi剖分图将震中限制在台站的值守区域内,并随着时间进程逐渐缩小可能的震中范围;当两个台站触发后就能够将可能的震中区域限制在一簇有限长度和宽度的双曲线段上;而当第三台触发后又能进一步将可能的震中范围限定于有限长度的直线段上;当第四个台站触发或捡拾到首个触发台站的S波到时信息后就能够准确计算得到震中位置.为考虑台网实际运行中可能由于信号传输等原因造成的延时,本研究选用了一定的等待时间,这也使得本文方法具备了相当的稳健性和适用性.利用福建省地震监测台网记录的68个3.0级以上地震的实际观测资料对本文方法进行验证,结果表明,采用本文提出的预警定位方法和定位步骤能够及时可靠地对震中位置进行估计,满足地震预警的要求.因此,本文方法是切实可行的.
为定量评估本文方法定位结果的精度,作者推导得到了采用前三、四台信息的定位误差计算公式.采用该公式,作者分别计算得到了福建省现有观测台网及“十一五"完成后的地震观测台网用于地震预警定位时的误差分布情况.由本文相关研究可以看出:定位误差分析是地震定位过程中重要的一个环节,通过定位误差分析的结果就能够事先对定位结果的可靠程度做出判断;同时,根据误差分析结果也能够更合理地对已有信息加以利用,从而提高整个地震预警系统运行的可靠性.定位误差分析结果对于指导台网台站规划建设也将起到重要的参考作用.但由于分析过程中作者忽略了若干因素的影响,因此本文误差分析结果还显得比较粗略.
致谢感谢本文评审专家提出的宝贵意见!
| [1] | Cooper J D. Letter to editor,. San Francisco Daily Evening Bulletin , 1868, 3: 1968. |
| [2] | Kamigaichi O, Saito M, Doi K, et al. Earthquake early warning in Japan: warning the general public and future prospects. Seismological Research Letters , 2009, 80(5): 717-726. DOI:10.1785/gssrl.80.5.717 |
| [3] | Kamigaichi O. JMA earthquake early warning. Journal of Japan Association for Earthquake Engineering , 2004, 4(3): 134-137. DOI:10.5610/jaee.4.3_134 |
| [4] | Allen R M, Brown H, Hellweg M, et al. Realtime test of the ElarmS earthquake early warning methodology. J. Geophys. Res. , 2007, 112: B08311. |
| [5] | Wurman G, Allen R M, Lombard P. Toward earthquake early warning in northern California. Journal of Geophysical Research , 2007, 112: B08311. DOI:10.1029/2006JB004830 |
| [6] | Iglesias A, Singh S K, Santoyo M A, et al. The seismic alert system for Mexico City: an evaluation of its performance and a strategy for its improvement. Bull. Seism. Soc. Am. , 2007, 97(5): 1718-1729. DOI:10.1785/0120050202 |
| [7] | Erdik M, Fahjan Y, Ozel O, et al. Istanbul earthquake rapid response and the early warning system. Bulletin of Earthquake Engineering , 2003, 1(1): 157-163. DOI:10.1023/A:1024813612271 |
| [8] | Zollo A, Iannaccone G, Manfredi G. Development and experimentation of a prototype system for seismic early warning applications in Campania region (Southern Italy). Workshop on Seismic Early Warning for European Cities (Abstracts), Napoli, Italy, 2004. |
| [9] | Zollo A, Iannaccone G, Lannaccone G, et al. Earthquake early warning system in southern Italy: methodologies and performance evaluation. Geophysical Research Letters , 2009, 36: L00B07. DOI:10.1029/2008GL036689 |
| [10] | Hsiao N C, Wu Y M, Shin T C, et al. Development of earthquake early warning system in Taiwan. Geophysical Research Letters , 2009, 36: L00B02. DOI:10.1029/2008GL036596 |
| [11] | Wu Y M, Teng T L. A virtual subnetwork approach to earthquake early warning. Bulletin of the Seismological Society of America , 2002, 92(5): 2008-2018. DOI:10.1785/0120010217 |
| [12] | 李山有, 金星, 马强, 等. 地震预警系统与智能应急控制系统研究. 世界地震工程 , 2004, 20(4): 21–26. Li S Y, Jin X, Ma Q, et al. Study on earthquake early warning system and intelligent emergency controling system. World Earthquake Engineering (in Chinese) , 2004, 20(4): 21-26. |
| [13] | 朱福祥, 郭迅, 李山有, 等. 重大工程地震预警初步研究. 世界地震工程 , 2002, 18(3): 32–36. Zhu F X, Guo X, Li S Y, et al. Preliminary study on earthquake early warning system for significant infrastructures. World Earthquake Engineering (in Chinese) , 2002, 18(3): 32-36. |
| [14] | 廖旭, 黄河. 企业地震预警系统应用研究. 地震工程与工程振动 , 2002, 22(6): 142–149. Liao X, Huang H. Study on earthquake alarm system for enterprises. Earthquake Engineering and Engineering Vibration (in Chinese) , 2002, 22(6): 142-149. |
| [15] | 李勇. 行星地球地震预警系统(测试版)的初步应用. 地球物理学进展 , 2007, 22(4): 1066–1069. Li Y. Elementary applications for a tentative earthquake warning system upon the planet earth (Test Version). Progress in Geophysics (in Chinese) , 2007, 22(4): 1066-1069. |
| [16] | 李勇. 行星地球的地震预警系统可监测汶川M8级地震. 地球物理学进展 , 2008, 23(3): 969–971. Li Y. Possibility to detect Wenchuan M8 earthquake by the Earthquake Warning System. Progress in Geophysics (in Chinese) , 2008, 23(3): 969-971. |
| [17] | Anderson K R. Epicentral location using arrival time order. Bulletin of the Seismological Society of America , 1981, 70(2): 541-545. |
| [18] | Rosenberger A. Arrival-time order location revisited. Bulletin of the Seismological Society of America , 2009, 99(3): 2027-2034. DOI:10.1785/0120080270 |
| [19] | Kanamori H. Locating earthquakes with amplitude: application to real-time seismology. Bulletin of the Seismological Society of America , 1993, 83(1): 264-268. |
| [20] | Zhou H W. Rapid three-dimensional hypocentral determination using a master station method. Journal of Geophysical Research , 1994, 99(B8): 15439-15455. DOI:10.1029/94JB00934 |
| [21] | Odaka T, Ashiya K, Tsukada S, et al. A new method of quickly estimating epicentral distance and magnitude from a single seismic record. Bulletin of the Seismological Society of America , 2003, 93(1): 526-532. DOI:10.1785/0120020008 |
| [22] | Rydelek P, Pujol J. Real-time seismic warning with a two-station subarray. Bulletin of the Seismological Society of America , 2004, 94(4): 1546-1550. DOI:10.1785/012003197 |
| [23] | Horiuchi S, Negishi H, Abe K, et al. An automatic processing system for broadcasting earthquake alarms. Bulletin of the Seismological Society of America , 2005, 95(2): 708-718. DOI:10.1785/0120030133 |
| [24] | Satriano C, Lomax A, Zollo A. Real-time evolutionary earthquake location for seismic early warning. Bulletin of the Seismological Society of America , 2008, 98(3): 1482-1494. DOI:10.1785/0120060159 |
| [25] | 马强. 地震预警技术研究及应用. 哈尔滨: 中国地震局工程力学研究所, 2008 . Ma Q. Study an application on earthquake early warning (in Chinese). Harbin: Institute of Engineering Mechanics, China Earthquake Administration, 2008 . |
| [26] | 林松建, 陈为伟, 郑师春. 福建地区地震震源深度特征的统计分析. 地震 , 2010, 30(1): 82–89. Lin S J, Chen W W, Zheng S C. Statistical analysis of earthquake depth distribution in Fujian region. Earthquake (in Chinese) , 2010, 30(1): 82-89. |