 2012, Vol. 55
2012, Vol. 55



2. 国家海洋局第二海洋研究所, 卫星海洋坏境动力学国家重点实验室, 杭州 310012;
3. 香港中文大学 太空与地球信息科学研究所, 香港沙田
2. State Key Laboratory of Satellite Ocean Environment Dynamics, Second Institute of Oceanography, State Oceanic Administration, Hangzhou 310012, China;
3. Institute of Space and Earth Information Science, The Chinese University of Hong Kong, Shatin, Hong Kong, China
浅海水深是海洋环境的重要要素.浅海水深的测量对海上交通运输、海洋渔业、浅海油气勘测与开发、海底输油气管道铺设等具有重要意义.传统的浅海水深测量技术不仅周期长、耗资大,而且对船只无法进入或有争议的海区无法测量[1].
随着遥感技术的发展,人们提出了浅海水深遥感探测的新技术.在海色清澈的浅海水域,激光[2]和可见光[3]等水深遥感技术取得了一定的成绩.合成孔径雷达(Synthetic Aperture Radar,SAR)是一种主动式的微波传感器,具有全天时、全天候的工作优点和提供的高分辨率SAR 遥感图像含有丰富浅海地形特征信息,展示了浅海水深SAR 遥感探测的巨大潜力[4-8].目前,浅海水深SAR 遥感探测技术受到世界各国科学家的广泛关注[7-15].
浅海水深SAR 遥感探测研究最早起源于1986年[16],目前较具规模和影响的浅海水深SAR 遥感探测技术是荷兰科学家采用迭代方式建立的“水深估测系统"[13],该技术在实验浅海区的反演水深值具有较高精度.国内,Huang等利用浅海地形SAR遥感成像仿真模型,建立了直接从SAR 遥感图像出发反演浅海水深的技术[14];Jin 等基于雷达海面后向散射强度与较大尺度海水运动的解析表达式,结合浅海动力学方程组成浅海水深反演方程组,但该方程组计算复杂,且求解的收敛结果可能不唯一[11].
本文基于浅海地形SAR 遥感成像机理与海面微波散射成像仿真模型,采纳“水深估测系统"的迭代反演优势[7, 13],克服直接反演技术中由于SAR图像斑点噪声所引入水深反演误差的缺陷[7, 14],提出了星载SAR 图像浅海水深遥感探测新技术.利用该遥感探测新技术,在台湾浅滩海域进行了浅海水深SAR 遥感探测实例研究,并通过SAR 遥感探测水深值与实测水深值的比较,对该技术的收敛与可行进行了实例验证.
2 浅海地形SAR 遥感成像机理微波穿透海水的深度仅为厘米量级,SAR 无法直接探测数米甚至数十米的浅海水深,SAR 测量的是海面后向散射强度.浅海地形之所以被SAR 观测到是由于水下地形间接改变了海面后向散射强度.国内外研究结果表明,浅海地形SAR 遥感成像机理由三个物理过程组成[6, 9, 15-19]:
(1) 潮流与浅海地形的相互作用改变海表层流场;
(2) 变化的海表层流场与风致海表面微尺度波相互作用,改变海表面微尺度波的空间分布,即水动力学调制过程;
(3) 雷达波与海表面微尺度波的相互作用,该过程决定雷达海面后向散射强度.
3 海面微波散射成像仿真模型基于水动力学调制过程与海面微波散射成像模式模拟仿真海面特征的海面微波散射成像仿真模型主要有四种[20]:Model for Fully Two-dimensional Simulation (M4S)、Radar Imaging Model (RIM)、Weak Hydrodynamic Interaction Theory (WHIT)和ERIM Ocean Model(EOM).本研究采用了目前较为成熟的海面微波散射成像仿真M4S 模型[21].该模型的基本构成包含两部分:作用量谱平衡方程和海面微波散射成像模式[21].
3.1 作用量谱平衡方程浅海地形影响下的海表层流场对海表面微尺度波的调制可以用Wentzel-Kramers-Brillouin弱相互作用理论描述[22].根据这个理论,缓慢变化流场中的定常微尺度波能谱密度的变化满足作用量谱平衡方程(action balance equation):

|
(1) |
其中A(r,k,t)为作用量谱,Ω(r,k,t)为表视频率,r= (x,y)为空间变量,k= (kx,ky)为微尺度波波数,S(r,k,t)为源函数,表征微尺度波能量增加和耗散过程.在M4S模型程序库里,通过射线追踪的数值积分方法求解作用量谱平衡方程,计算变化表流场和风场下的海表面微尺度波谱.
3.2 海面微波散射成像模式在Bragg共振散射理论的基础上,R.Romeiser等[21]提出了一种改进的组合表面模式(improved composite surfacemodel)用来描述粗糙海面的微波散射成像.这种散射成像模式从某种意义上也是三尺度模式,即把海面微尺度波分成了长波、中波和短波三个部分,同时考虑了长波和中波对短波的倾斜调制和水动力学调制.该模式在理论和试验研究中均体现了对海面微波散射成像的实际情况[21, 23-24].根据海表面微尺度波谱和雷达参数,利用M4S模型程序中改进的组合表面模式仿真雷达海面后向散射强度.
4 SAR 浅海水深遥感探测技术流程Alpers与Hennings等研究结果表明,在线性近似情况下,浅海地形SAR 遥感图像海面后向散射强度的相对变化(Δσ0)与海表层流速关系[6, 9]:

|
(2) |
其中,Δσ0=σ0-σ00,σ0 为浅海地形SAR 海面后向散射强度,σ00 为背景海面的雷达后向散射强度,A是与风速、风向等因素相关的系数,Φ 为雷达视向到流向的夹角,C=Acos2Φ,视为流速梯度因子.
式(2)可以看出,浅海地形SAR 海面后向散射强度的相对变化在流速峰值处为0,换言之,此处的海面后向散射强度主要由风速来决定[6, 11].假设流速峰值为0处的实际SAR 遥感图像的海面后向散射强度为σM0 ,仿真的SAR 海面后向散射强度为σSM0 ,在一定的精度要求范围内可以根据此处的海面后向散射强度(σM0 )决定海面风速的大小,使仿真σSM0 值最大程度接近实际σM0 值.此外,海面后向散射强度的相对变化与流速梯度成正比,可以借助海面后向散射强度的相对变化估算初始流速梯度.对浅海地形SAR 海面后向散射强度整条剖面而言,可以根据相邻亮暗点的SAR 海面后向散射强度之差RBD,通过二分法迭代过程不断调整流速梯度,使得仿真SBD值介于实际RBD值之间.平流项而言对浅海地形SAR 遥感图像信号的调制主要体现在位置与水深信号调制[6, 25],可以通过模式流场计算得到准确的平均背景流速,通过积分构造浅海地形影响下的表层流速场.
利用二分法不断修改海面风速和流速梯度因子,将修改后的海面风速与表层流速场输入海面微波散射成像模型M4S仿真浅海地形SAR 海面后向散射强度,使仿真信号最大程度地逼近实际SAR 图像上的海面后向散射强度,即仿真SBD值与实际RBD值,仿真σSM0 值与实际σM0 值之间绝对误差在一定要求范围内,且使二者具有较好相关性,输出最终海面风速、表层流速场等参数.
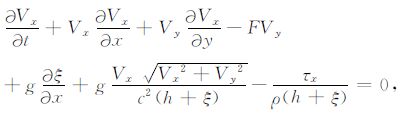
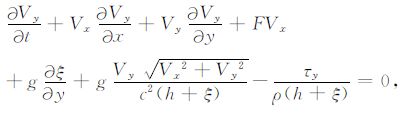
通过上述迭代过程得到的海面风速、表层流速场及其他有关参数,采用差分法求解奈维-斯托克方程(式(3)、(4))和连续性方程(式(5))计算得到浅海水深.
|
(3) |
|
(4) |

|
(5) |
其中Vx和Vy分别为x和y方向的流速,ξ 为相对于水平位势面高度,h为海底与水平位势面之间的距离,F为科氏参量,c为谢才(Chézy)参量,τx和τy分别为x和y方向的风应力,ρ 为海水密度,g为重力加速度.
斑点噪声是SAR 遥感图像中固有的,本文对浅海地形SAR 遥感图像进行多视处理、滤波、辐射定标、几何校正等遥感图像预处理,得到浅海地形SAR 海面后向散射强度剖面.在迭代过程中,初始海面风速与流速梯度因子的适当选取会加快迭代收敛速度.对一定时间误差内的SAR 遥感图像而言,如果缺少实测风向、风速,可以通过模式的风向资料来逼近SAR 成像时刻的风向[26],利用CMOD-4模式反演初始海面风速[27-28],并利用AH 线性理论计算初始流速梯度因子[6].图 1给出了SAR 浅海水深遥感探测的技术流程图.
对浅海水深SAR 遥感探测技术流程分析可以看出,本文提出的星载SAR 图像浅海水深遥感探测新技术,采纳了荷兰“水深估测系统"中所利用的同化迭代的优点,避免了在迭代过程中引入浅水动力学方程,以减少边界条件等不确定的水文因素而导致的水深探测误差[7, 13],两者相比,更少地依赖于常规水深资料.此外,将海面微波成像仿真模型应用于遥感探测的迭代过程中,与直接从SAR 遥感图像出发反演浅海水深的技术相比,克服了直接反演技术中SAR 图像斑点噪声所引入水深反演误差的缺陷[7, 14].与求解浅海水深反演方程组得到浅海水深的遥感探测技术相比,综合考虑了海面风速、风向等参数对SAR 图像特征的影响,减少了由于浅海地形SAR 遥感图像特征考虑不完全导致的水深反演误差,同时提高了浅海水深反演的空间分辨率[7, 11].

|
图 1 浅海水深SAR遥感探测技术流程图 Fig. 1 The flow chart of shallow water depths retrieval by SAR |
图 2 为成像于2002 年8 月11 日10 时35 分(BJT)的台湾浅滩浅海地形SAR 遥感图像与2006年8月下旬在该海域实测水深数据的对应关系,SAR 遥感图像分辨率为25m,飞行方向由北向南.A→B为进行浅海水深SAR 遥感探测的研究剖面.

|
图 2 2002年8月11日10时35分(BJT)的ERS-2浅海地形SAR遥感图像与该海域2006年8月下旬实测水深对应关系其中三角黄线为连续走航路线示意图,A、B与C为三角形站位的三个顶点,A→B为进行浅海水深遥感探测的研究剖面. Fig. 2 ERS-2 SAR image of Taiwan Shoal imaging at 10;35 on 11 August 2002 withthe characteristic of shallow water bathymetry and in-situ water depth measurementsThe yellow triangle diagram is the continuous route and shallow water depths retrieved along profile A→B. |
图 2中三角形站位的三个顶点按照C→B→A的顺时针顺序进行连续走航观测,剖面AB垂直于水下地形走向,剖面AC 平行于水下地形走向.通过图 2分析可知,水下地形在SAR 遥感图像整体上呈现亮-暗相间的条纹状特征,浅海地形的顶部(水深最浅处)在SAR 遥感图像出现暗-亮的特征变化;此外,水下地形SAR 遥感图像与水下地形的形态特征、图像变化与浅海地形的变化趋势基本保持一致,且具有较大的成像面积.
根据雷达数据得到入射角为24.7°,雷达波长为5.6cm.由2002年8月11日8时(BJT)空间分辨率为25km 的NCEP/QSCAT 混合海面风场资料得到SAR 成像时刻在该海域的海面风向为东风向.根据厦门大学提供的水文资料,表层平均流速为0.75m/s.初始水深为19m.基于CMOD-4 模式反演得到初始海面风速为5.0 m/s,根据初始海面风速、风向资料和AH 线性近似理论计算初始流速梯度因子C为0.002.
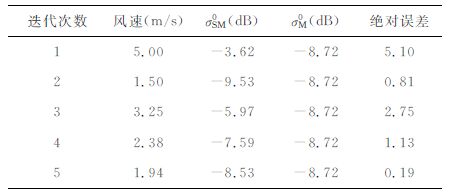
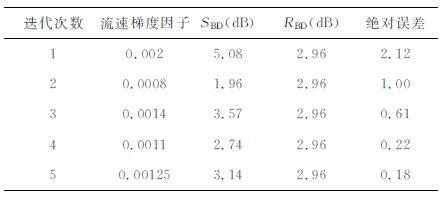
基于浅海水深SAR 遥感探测技术流程图(图 1),利用二分法迭代修正海面风速、表层流速场(流速梯度场或流速梯度因子),输出最终风速为1.94m/s,流速梯度因子C为0.00125.表 1 与表 2 分别给出了海面风速与流速梯度迭代修正过程中的迭代次数、风速与流速梯度因子的变化情况,仿真σSM0 值与实际σM0 值,仿真SBD值与实际RBD 值的绝对误差分析过程,可以看出仿真信号与实际SAR 遥感图像随着迭代过程的修正,二者的绝对误差均变小.图 3给出了研究剖面A→B 实际浅海地形SAR 遥感图像信号(实线)与最终仿真得到的SAR 海面后向散射强度(虚线),仿真信号与实际结果吻合较好,二者的相关系数达到0.94.
|
|
表 1 海面风速迭代修正与误差分析过程 Table 1 The iterative process of amending the sea surface wind speed |
|
|
表 2 流速梯度因子迭代修正与误差分析过程 Table 2 The iterative process of amending the velocity gradient factor |

|
图 3 研究剖面A→B的SAR海面后向散射 强度(实线)和仿真信号(虚线) Fig. 3 The NRCS of shallow water bathy metry SARimage ( solid ) and the simulated signal ( dashed ) along the data line A→B |
图 4给出了A→B 剖面的SAR 遥感探测水深值(实线),图中点为2006年8月下旬在此海域的实测水深值,水深值均已作潮汐订正等误差校正.从图 4可以看出,SAR 遥感探测水深值与实测水深值吻合较好.

|
图 4 A→B剖面的实测水深值(点)与 SAR遥感探测水深值(实线) Fig. 4 The in-situ water depth measurements (point) and water depths retrieved by SAR (solid) |
为定量估算SAR 遥感探测技术反演浅海水深的精度,沿走航路线A→B 选取验证水深点25 个,与实测水深值进行比较,其中检测水深样本数符合卫星遥感探测水深检测样本要求[29].比较结果显示,SAR 遥感探测浅海水深的均方根误差2.47 m,误差为5.98%.图 5给出了SAR遥感探测浅海水深值与实测水深值的比较关系.图 5可以看出,SAR遥感探测水深值与实测水深值吻合较好,但个别水深探测值出现较大误差,主要原因是由于在利用迭代修正过程反演的海面风速、表层流速与利用差分法求解奈维-斯托克方程和连续性方程计算浅海水深时,其计算过程所导致.

|
图 5 SAR遥感探测浅海水深值与实测水深值的比较关系 Fig. 5 Comparison between the SAR image-retrieved depths and in-situ water depth measurements |
本文基于浅海地形SAR 遥感成像机理与海面微波散射成像仿真模型,提出了星载SAR 浅海水深遥感探测新技术,通过仿真浅海地形SAR 海面后向散射强度剖面和实际SAR 图像剖面信号的接近程度,SAR 遥感探测浅海水深值与实测水深值的比较关系评价了该技术的收敛与可行性.由于浅海地形SAR 遥感成像机理的复杂性,引起SAR 遥感探测浅海水深误差的因素有多方面.主要有以下几个:
(1) 浅海水深SAR 遥感探测技术模型虽然很好地描述了浅海地形SAR 遥感成像机理的三个物理过程,但并不能完整地描述这些物理过程;
(2) 遥感探测技术模型本身与迭代过程会引入探测水深误差;
(3) 海面风向、风速、表层流速和水深等初始计算条件的不精确,也会造成浅海水深探测的误差;
(4) 浅海地形SAR 遥感图像的挑选与SAR 图像噪声也将会影响浅海水深遥感探测的精度.
未来可以在更多的浅海海域搜集更多的实测水深、SAR 遥感图像及同步的海况、水文信息,不断完善与优化浅海地形SAR 遥感成像机理与浅海水深SAR 遥感探测技术模型,综合考虑风场、表层流两者的相关性对浅海水深SAR 遥感探测的定量影响,同时要不断减少浅海水深SAR 遥感探测技术对常规水深数据的依赖,而多波段、多极化或全极化、干涉SAR 遥感图像将是进行浅海水深SAR 遥感探测的趋势.利用该遥感探测新技术与浅海地形SAR 遥感图像,在台湾浅滩海域进行了浅海水深SAR 遥感探测实例研究.仿真浅海地形SAR 海面后向散射强度剖面和实际SAR 图像剖面信号非常吻合,且二者的相关系数达到0.9以上.SAR 遥感探测水深值与实测水深值的比较结果显示,SAR 遥感探测水深值的均方根误差达到2.5 m,误差小于10%.结果表明SAR 具有探测浅海水深的能力,本文提出的浅海水深SAR 遥感探测技术是收敛与可行的.致 谢 感谢中国科学院对地观测与数字地球中心和欧洲空间局提供的ERS-2SAR 遥感图像,CISLResearch Data Archive (RDA) 提供的NCEP/QSCAT 混合海面风场资料,厦门大学李炎教授、朱大勇博士提供的台湾浅滩实测水深数据与模式流场资料,美国迈阿密大学R.Romeiser教授提供的海面微波散射成像仿真M4S模型.
| [1] | 梁开龙. 水下地形测量. 北京: 测绘出版社, 1995 . Liang K L. Underwater Topographic Survey (in Chinese). Beijing: Surveying and Mapping Press, 1995 . |
| [2] | 张骞. 水深遥感方法研究. 河海大学学报 , 1998, 26(6): 68–72. Zhang Y. Study of fathoming method by RS technology. J. Hohai University (in Chinese) , 1998, 26(6): 68-72. |
| [3] | 陈卫标, 陆雨田, 褚春霖, 等. 机载激光水深测量精度分析. 中国激光 , 2004, 31(1): 102–104. Chen W B, Lu Y T, Chu C L, et al. Analyses of depth accuracy for airborne laser bathymetry. Chin. J. Laser. (in Chinese) , 2004, 31(1): 102-104. |
| [4] | De Loor G P. The observation of tidal patterns, currents and bathymetry with SLAR imagery of the sea. IEEE J. Ocean. Engin. , 1981, 6(4): 124-129. |
| [5] | Fu L L, Holt B. Seasat Views Oceans and Sea Ice with Synthetic Aperture Radar. Pasadena: JPL Publications , 1982: 81-120. |
| [6] | Alpers W, Hennings I. A theory of the imaging mechanism of underwater bottom topography by real and synthetic aperture radar. J. Geophys. Res. , 1984, 89(C14): 10529-10546. |
| [7] | 范开国, 黄韦艮, 贺明霞, 等. SAR浅海水下地形遥感探测技术综述. 地球物理学进展 , 2009, 24(2): 714–720. Fan K G, Huang W G, He M X, et al. A review about shallow sea bottom topography mapping by SAR. Progress in Geophys. (in Chinese) , 2009, 24(2): 714-720. |
| [8] | Fan K G, Huang W G, He M X, et al. Depth inversion in coastal water based on SAR image of waves. Chin. J. Oceanol. Limnol. , 2008, 26(4): 434-439. |
| [9] | Vogelzang J. The mapping of bottom topography with imaging radar-a comparison of the hydrodynamic modulation in some exiting models. Int. J. Remote Sensing , 1989, 10(9): 1503-1518. |
| [10] | Wensink G J, Hesselmans G H F M, Calkoen C J. The commercial use of satellite observation for bathymetry surveys. Proceedings Inter. Symp. on Opera. of R. S. for Coas. and Mari. Appli. Enschede, Netherlands , 1993: 29-36. |
| [11] | Jin M B, Zhang J, Yuan Y L. Analysis of bathymetric features using SAR image: An example from the Southern North Sea. Chin. J. Oceanol. Limnol. , 1998, 16(2): 128-136. |
| [12] | Hesselmans G H F M, Wensink G J, van Koppen C G. Bathymetry assessment demonstration off the Belgian coast-BABEL. The Hydro. J. , 2000, 96: 3-8. |
| [13] | Calkoen C J, Hesselmans G H F M, Wensink G J, et al. The bathymetry assessment system: efficient depth mapping in shallow seas using radar images. Int. J. Remote Sensing , 2001, 22(15): 2973-2998. |
| [14] | Huang W G, Fu B. A spaceborne SAR technique for shallow water bathymetry surveys. J. Coastal Research , 2004, 43: 223-228. |
| [15] | 范开国, 傅斌, 黄韦艮, 等. 浅海水下地形的SAR遥感仿真研究. 海洋学研究 , 2009, 27(2): 79–83. Fan K G, Fu B, Huang W G, et al. Simulation study on SAR shallow water bathymetry. Journal of Marine Sciences (in Chinese) , 2009, 27(2): 79-83. |
| [16] | Harris P T, Ashley G M, Collins M B, et al. Topographic features of the Bristol Channel sea-bed: A comparison of SEASAT (SAR) and side-scan sonar images. Int. J. Remote Sensing , 1986, 7(1): 119-136. |
| [17] | 黄韦艮, 高曼娜, 周长宝, 等. 蓬莱附近海区水下地形的星载合成孔径雷达遥感. 东海海洋 , 1996, 14(1): 52–56. Huang W G, Gao M N, Zhou C B, et al. Spaceborne SAR observations of underwater bottom topography off the north coast of Penglai. Donghai Marine Science (in Chinese) , 1996, 14(1): 52-56. |
| [18] | 范开国, 黄韦艮, 贺明霞, 等. 风速风向对SAR浅海水下地形成像影响的仿真研究. 遥感学报 , 2008, 12(5): 743–749. Fan K G, Huang W G, He M X, et al. Simulation study on the effect of wind on SAR imaging of shallow water bathymetry. Journal of Remote Sensing (in Chinese) , 2008, 12(5): 743-749. |
| [19] | Vogelzang J. A model comparison study to the imaging of submarine reefs with synthetic aperture radar. Int. J. Remote Sensing , 2001, 22(13): 2509-2536. |
| [20] | Lyzenga D R. Status of forward models for SAR observation of current features. The Coastal and Marine Applications of SAR Symposium. Svalbard, Norway , 2003. |
| [21] | Romeiser R, Alpers W. An improved composite surface model for the radar backscattering cross section of the ocean surface 2. Model response to surface roughness variations and radar imaging of underwater bottom topography. J. Geophys. Res , 1997(C11): 25251-25267. |
| [22] | Bretherton F P. Linearized theory of wave propagation. Lect. Appl. Math. , 1970, 13: 61-102. |
| [23] | Romeiser R, Schnidt A, Alpers W. A three-scale composite surface model for the ocean wave-radar modulation transfer function. J. Geophys. Res. , 1994, 99(C5): 9785-9801. |
| [24] | Romeiser R, Alpers W, Wismann V. An improved composite surface model for the radar backscattering cross section of the ocean surface 1. Theory of the model and optimization/validation by scatterometer data. J. Geophys. Res , 1997, 102(C11): 25238-25250. |
| [25] | Hennings I. Radar imaging of submarine sand waves in tidal channels. J. Geophys. Res. , 1990, 95(C6): 9713-9721. |
| [26] | 范开国, 黄韦艮, 贺明霞, 等. SAR 海洋内波表层流反演方法探讨. 遥感学报 , 2010, 14(1): 122–130. Fan K G, Huang W L, He M X, et al. Retrieving internal wave surface currents from SAR image. Journal of Remote Sensing (in Chinese) , 2010, 14(1): 122-130. |
| [27] | Lehner S, Schulz-Stellenfleth J, Sch?ttler B, et al. Wind and wave measurements using complex ERS-2 SAR wave mode data. IEEE Trans. Geosci. Remote Sens. , 2000, 38(5): 2246-2257. |
| [28] | Portabella M, Stoffelen A, Johannessen J A. Toward an optimal inversion method for synthetic aperture radar wind retrieval. J. Geophys. Res. , 2002, 107(C8): 3086. DOI:10.1029/2001JC000925. |
| [29] | 司建文. 海洋环境参数监测技术检测方法汇编. 北京: 海洋出版社, 2005 : 59 -61. Si J W. Compilation of the Method for the Marine Environment Parameter Detection (in Chinese). Beijing: Ocean Press, 2005 : 59 -61. |