 2010, Vol. 53
2010, Vol. 53

2. 国家海洋局第二海洋研究所, 杭州 310012;
3. 北京大学地球与空间科学学院, 北京 100871;
4. 中国科学院研究生院, 北京 100049
 , ZHAO Ming-Hui1
, ZHAO Ming-Hui1 , QIU Xue-Lin1, LI Jia-Biao2, CHEN Yong-Shun3, RUAN Ai-Guo2, LI Shou-Jun2, ZHANG Jia-Zheng1,4, WU Zhen-Li2, NIU Xiong-Wei2
, QIU Xue-Lin1, LI Jia-Biao2, CHEN Yong-Shun3, RUAN Ai-Guo2, LI Shou-Jun2, ZHANG Jia-Zheng1,4, WU Zhen-Li2, NIU Xiong-Wei2
2. The Second Institute of Oceanography, State Oceanic Administration, Hangzhou 310012, China;
3. Computational Geodynamics Laboratory, Department of Geophysics, School of Earth and Space Sciences, Peking University, Beijing 100871, China;
4. Graduate University of Chinese Academy of Sciences, Beijing 100049, China
洋中脊是地球内部与外界物质和能量剧烈交换的场所,研究其深部结构对于分析地球内部结构以及能量物质交换意义重大.以往主要采用的二维地震探测可以获取研究区内单一方向上的结构变化,但不能提供具有三维特征的洋中脊整体结构.由于三维地震探测方法(三维层析成像方法)在洋中脊区域的广泛使用,极大的丰富了我们对洋壳及地幔的结构特征[1, 2]、岩浆活动[3]以及热液的循环机制[4]等海洋科学研究中重点领域的认识[5~7].
在海上三维地震探测实验中,气枪和海底地震仪(Ocean Bottom Seismometer,OBS)因使用简单方便、可靠性高成为海洋地球物理领域内强有力的研究工具[8, 9].而在OBS记录资料处理环节中,获取各个震相的准确走时是保证最终结果(区域内的速度结构和构造特征)的重要依据.为了让有限数量的OBS较为全面地记录到整个研究区内折射和反射的气枪信号,实验前还要有计划地布置OBS的投放位置和测线方向[10].但在实际的海上人工地震作业过程中,为抵消海风、海流等环境因素的影响,调查船的艏向需要进行相应调整而导致实验中放炮点距离预设测线有数十米的偏差;而接收点(OBS)的位置会在降落至海底的过程中偏离设计点数百米,严重影响Pg、PmP、Pn等深部震相的走时精度.当三维地震结构探测中测线较密集时,这种影响也会增大.因此,OBS位置校正以及炮点位置校正是整个三维地震资料处理工作中最基础的环节.
目前OBS的位置校正主要以直达水波的走时为基础.约束校正结果的其他辅助数据还有由CTD仪器或者深度-热流仪器所获得的水体声波速度剖面,以及多波束深度数据.对OBS位置精度要求不高时,可简单的采用深度资料并结合直达水波走时粗略获取二维剖面上的OBS位置[11~13].当精度要求较高时,尤其是三维地震结构研究,获取OBS的实际位置十分重要.可以在OBSTOOL软件平台[14]下,利用垂直分量的直达水波及水平极化角反演得到OBS落点位置[15];也能通过射线追踪等方式来获取精确度较高的OBS实际位置(校正精度为18m)[16];结合更复杂的非线性算法(如搜索算法,迭代算法)可以获取精度为10m左右的结果[17~20].
本文针对以往对OBS记录到的直达水波曲线特征分析较少、只利用单条测线的直达水波数据进行OBS位置校正等不足,在二维测线位置校正的研究基础上,利用最新的西南印度洋中脊三维地震探测实验数据,一方面阐述了三维探测实验中炮点数据校正方法;另一方面,综合最小二乘法和蒙特卡洛方法,利用每一个OBS台站记录到的多条测线的直达水波数据校正了OBS位置,并探讨了直达水波曲线形态特征及位置校正精度.以期建立三维地震探测中OBS位置校正的通用方法.
2 西南印度洋海底地震仪探测实验2010年1月31日至3月6日,中国大洋协会“十一五”研究第21环球航次第6航段在西南印度洋中脊进行综合地球物理调查,成功实施了大容量气枪枪阵的布设和激发作业及大规模的海底地震仪探测实验,这是第一次在“大洋一号”上实施大容量气枪地震作业,是大洋环球航次海上地震探测一个新的里程碑.此次实验使用的人工震源是中国科学院南海海洋研究所提供的4支大容量气枪枪阵,总容量达到9.84×105cm3,气枪放炮时的压力为120~130kg/cm2.放炮时间间隔一般为100~130s,炮间距为250m左右.气枪枪阵连续作业13天,有效放炮时间310h,共激发10832炮.实验共完成测线52条,累计探测长度2650km.实验中实际投放3种类型的海底地震仪共40台用于接收气枪信号,其中2~5号及37号为国产仪器[21, 22](图 1),共回收38台(19号、28号丢失),回收率达到95%.地震探测实验的同时也进行了重力测量、多波束测量,获取了大量相应的地球物理资料.本次洋中脊地震调查,在放炮数量、投放回收台数、地震测线条数、射线覆盖密度等方面,均为后期的三维地壳结构研究提供了大量数据支持.

|
图 1 西南印度洋中脊三维地震探测位置图 Fig. 1 3D seismic experiment in the SW Indian Ocean Ridge |
炮点校正主要包括放炮时间和震源位置校正.此次探测我们采用几套先进的计时设备,自制精密计时仪的精确度在1ms以内,可以获取准确的放炮时间.因此,这里主要阐述人工震源炮点的位置校正.
炮点位置校正就是将船载GPS所记录的放炮位置校正到实际的枪阵震源中心位置.“大洋一号”船载GPS天线位置距离船尾有56 m,船尾距枪阵中心30 m(拖缆长度),即震源枪阵与GPS天线的距离为86m(图 2).“大洋一号”船载光纤罗经与运动传感器(仪器型号为:IxseaOctans:http://www.ixsea.com/en/navigation_motion/1/octans.html)不仅提供实时的船舶运动姿态参数(横摇、纵摇、升沉),而且能获取实时的船艏向信息与测量精度.船艏向测量精度为“±0.2/cos(latitude)”,调查区的纬度为南纬37.7°,因此大洋一号实时艏向测量精度±0.25°.本文采用实时的艏向数据来对炮点位置进行校正.

|
图 2 炮点位置校正示意图(以3111炮为例) Fig. 2 A schematic diagram of the correction of shot's position (taking 3111th as an example) |
以第3111炮点为例说明炮点校正过程(图 2).校正前坐标A0(x0,y0),枪阵震源与主GPS距离86m,经艏向校正后的坐标为A(x1,y1),航向校正后的坐标为B(x2,y2).校正点A就是船后拖载的枪阵中心位置.

|
校正时须注意到GPS、枪阵、测线方向之间的关系.正常海上作业时(调查船沿测线方向直线前进),枪阵和船体的艏向在一条直线上.因此可以直接采用调查船的航向对炮点进行校正.而此次西南印度洋中脊三维地震探测与以往在南海海域进行的二维深地震探测[23, 24]不同.以往的测线方向(航向,course direction)与艏向(heading direction)相差小于20°,且以往实验船船体较小,气枪枪阵与船载GPS天线距离只有47m[9],按上述公式得出用航向和艏向校正的区别仅约为16 m.因此,一般简单地采用平均航向对每一炮点进行位置校正.
在本次实验中,由于受到海流的流速和流向以及风速风向以及转弯等因素影响,航向与艏向相差超过20°,有的测线段甚至超过30°.如果采用之前的航向校正方法会造成45 m左右的误差(2×86× sin(30/2)°=45 m).炮点3111的艏向与航向相差21°,艏向校正点A与航向校正点B之间的距离相差却达到31.3 m.理论情况下,这会造成后期OBS位置校正时所拾取的直达水波走时有高达15ms的误差,也会造成Pg震相有近6ms的误差.本文的计算结果证明利用艏向对炮点位置进行校正的重要性.
3.2 海底地震仪位置校正由于主要受到海流的影响,自由投放的OBS在海底的实际落点位置会在一定范围内偏离设计点,这种偏离现象会造成拾取震相Pg、PmP、Pn等的走时曲线有较大误差,不利于后期反演地下的精细结构.因此要对OBS的位置进行校正.由于OBS记录的直达水波震相含有炮点和OBS台站之间最简单准确的时间-距离信息,所以一般利用直达水波来校正OBS的位置[11~20].本文结合蒙特卡洛(Monte Carlo)方法[25]和最小二乘法来反演出海水中的声波传播速度和OBS最有可能的落点及其深度(图 3).下面以实验A区OBS10台站为例说明OBS位置校正过程及其结果:

|
图 3 OBS位置校正流程图 Fig. 3 The flow chart of OBS relocation |
根据OBS10的投放点A与回收点C的位置(图 4a),估计海流造成OBS最大距离偏离约为2km.以OBS10的投放点为中心,以2km的距离为半径圈定OBS可能着落的范围F(图 4a).采用蒙特卡洛方法在F内按标准正态分布(0点位于OBS投放点)随机产生数万个点,使得搜索范围F被基本覆盖(图 4b).拾取OBS10的原始地震记录剖面中直达水波走时Tobs(图 5c)及找出对应的炮点坐标Cshot(图 4a).采用二次曲线拟合方法拟合直达水波的走时曲线,反演得出声波在海水中的速度vel和OBS所在的深度Dcal.计算范围F内每一个点(Cpoint)与Cshot之间直达水波的走时时间(Tcal),再计算出其与观测走时之间的差值的均方根RMS(Tcal-Tobs).计算过程中利用多波束数据进行深度控制.从这数万个点各自的RMS中选择最小值及其对应点坐标B.再以B点为搜索中心重复上述步骤,多次迭代直至计算结果稳定.最终的B点即为计算出的OBS在海底的实际落点位置.

|
图 4 OBS10台站单条/两条测线的RMS分布图 (a)搜索范围和放炮点的相对位置图;(b)搜索范围内随机分布的点;(c)和(d)分别为用两条测线和一条测线的直达水波数据进行OBS位置校正的RMS分布图;其中,(c)和(d)中的0.05s等值线内分别为0.02s和0.01s的RMS等值线. Fig. 4 A comparison of RMS distributions of using one-or two-line direct water waves for OBS 10's relocation (a) shows the searching domain.Point A, C and B are the designed, received and corrected location of OBS10, respectively; (b) The random points distributed by Monte Carlo method according to standard normal distribution; (c) and (d) are RMS distributions when direct water waves of two survey lines and single line are used for OBS relocation, respectively; In (c) and (d), the circles inside 0.05s contour stand for 0.02s, 0.01s contours, respectively. |

|
图 5 OBS10台站校正前后直达水波特征对比 (a)放炮测线与OBS设计、回收及校正位置;(b)蓝、红、黑线分别为OBS位置校正前、校正后及理论的直达水波的绝对/折合(折合速度为6km/s)走时曲线形态;(c)和(d)分别为校正前与校正后的折合记录剖面与直达水波拾取. Fig. 5 Comparison of the characters of direct water waves before and after relocation of OBS10 (a) Two survey lines and OBS designed, recovered, corrected point; (b) The absolute and reduced (6km/s) travel time curves colored in blue, red and black represent the direct water wave's shape before and after OBS relocation and of theoretical calculation, respectively; (c) and (d) show the reduced recording profiles before and after relocation respectively, and picking of direct water waves. |
当只采用单条测线的直达水波数据进行位置校正时,可以明显地发现测线左右两侧都有可能出现RMS的最小值(图 4d),由于每次计算时蒙特卡洛方法投点具有随机性,最终选择的结果(B点)就可能出现在测线的左侧或右侧.这虽然能保证OBS沿该测线方向的偏离得到较好的校正,但对于垂直测线方向的偏离却无法控制.这是对二维测线进行位置校正时的主要不足.而采用两条测线的直达水波时,便能惟一地确定RMS的最小值(图 4c).说明采用两条测线能更好地控制OBS位置.
拾取OBS原始记录(校正前)中的直达水波走时(图 5c),用上述方法反演得到校正后的OBS位置,再拾取校正后的OBS记录地震剖面图中直达水波的走时(图 5d),并与校正前的直达水波走时曲线进行对比.OBS10校正前,OBS10记录中测线1的零偏移距位于6980和6981炮之间,但其直达水波绝对走时曲线最低点大致位于6982炮附近(图 5b),说明OBS在海底的实际位置偏离投放点大概2个炮间距(6980~6982),约为500 m.校正后OBS记录剖面中零偏移距在6982炮附近(图 5d),其直达水波绝对走时曲线是一个大致以第6982炮为对称轴的曲线,与校正前的基本重合,说明校正结果准确.走时曲线的重合程度是判断位置校正结果的主要标准之一,走时残差的均方根可以作为重合程度的量化参数.
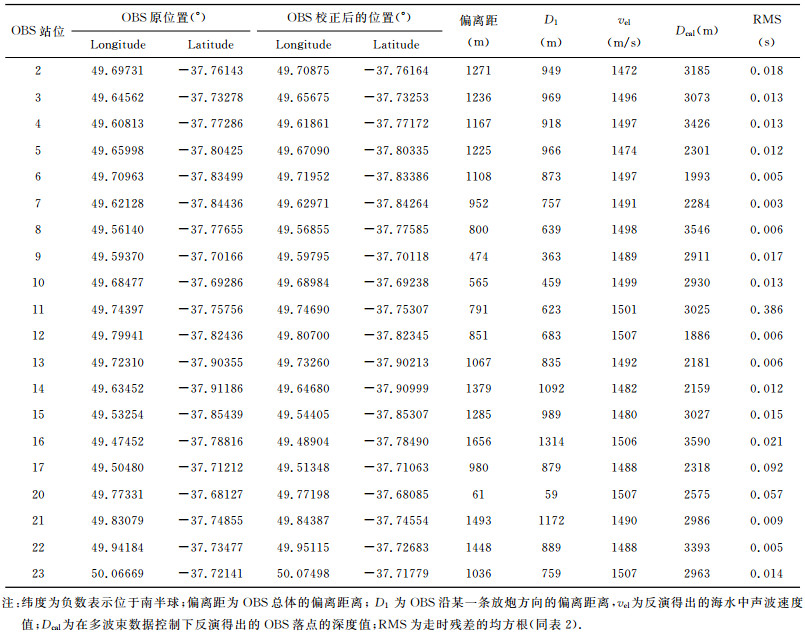
本文在炮点校正的基础上,对实验A区23台OBS(除OBS19丢失,OBS1与OBS18没有有效数据)完成了OBS台站位置校正(图 6).由于OBS20,OBS22,OBS23只记录到一个方向的直达水波数据,因此只采用单条测线的数据并结合其他OBS的偏离情况进行校正,其余台站均采用两条测线的直达水波数据进行校正,位置校正结果的详细参数见表 1.RMS(Tcal-Tobs)一般在20 ms以内.有少量台站(OBS11,OBS17)的RMS(Tcal-Tobs)在100ms左右,这可能是由仪器本身的记录情况造成.综合已校正的实验A区20台OBS情况(图 6),OBS在海底的准确位置一般位于投放点和回收点的中间区域.相同测线上的OBS,其相对于投放点的偏离方向一般相同,说明OBS在连续投放作业时间段内可能受同一海流方向影响.

|
图 6 实验A区OBS投放、回收及校正点位置图 Fig. 6 The designed points, recovered points, and corrected locations of OBSs in area A |
|
|
表 1 OBS位置校正结果及校正参数表 Table 1 The corrected OBSs' locations and parameters (only area A) |
在理论情况下,直达水波绝对走时曲线应该是一个以最小偏移距为对称轴的双曲线的一支.为了便于震相分析和拾取,通常将地震剖面折合处理.减去折合时间后,其形状应该变成一个对称的近W的双峰形(对称中心为0偏移距的位置)(图 5b,折合速度为6km/s).折合处理会造成处理前后的走时曲线与对称轴的交点不重合,这是因为一般情况下最小偏移距并不为0,产生这个情况的原因是OBS在海平面内的投影位置距离测线有一定的距离(图 5a).
走时曲线的对称性是判断OBS校正后的位置是否准确的重要依据之一.而当OBS的位置发生偏离时,直达水波折合走时曲线变得非常不对称(图 5c),但可以从其非对称曲线的最低点来估计出OBS沿该测线方向上的偏离.设原始记录中0偏移距位置(投放点)与折合后的直达水波走时曲线(折合速度为6km/s)的最低点之间的距离为D2,D1为OBS沿某条测线偏离投放点的距离,炮点的偏移距为x,vel为气枪信号在海水中的传播速度(设为1.5km/s),Dcal为OBS校正后位置的深度.则折合后的直达水波走时T与偏移距x之间有以下关系:

|
(1) |
对(1)式两边进行一阶微分,找出满足T'(x)=0的x.有

|
(2) |
OBS10沿测线1偏离了459 m,反演得出其深度为2930 m(表 1),用公式(2)算出的偏离距为1.21km,而剖面中D2为1.1km(图 5c),上述关系式基本成立.检测对比其他台站的实际结果后认为,上述公式可以用来在没有其他数据支持的情况下,较为准确地估算出OBS的偏离距离.
4.2 校正精度分析OBS实际落点位置(B点)是由数万个点中的最小RMS(Tcal-Tobs)值确定.理论上,该方法具有极高的准确度(RMS应趋近于0).但由于实际测量以及海底地形等实际情况,Tcal与Tobs都会偏离理想状态,使得RMS的值不可能为0.本文的计算结果中RMS值一般稳定在15~20 ms,少量在100 ms左右.但RMS值的大小并不能说明校正精度的高低(表 2).这是因为,RMS本身只表示差异,而这种差异可能是拾取走时本身的不确定性(约为4ms)[4, 26],以及反演出的速度只是平均值等因素造成,而不是由于方法的限制.
|
|
表 2 OBS10和OBS11台站4次位置校正计算结果 Table 2 Four results of OBS10 and OBS11 relocation |
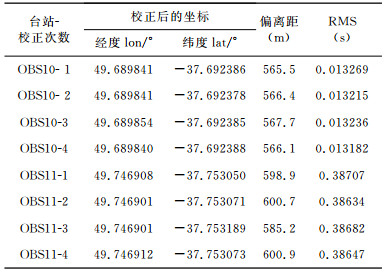
另外,最小的RMS值并不是一个异常点或者是一个偶然点.由于蒙特卡洛方法投点的随机性,图 4c中0.01s等值线内点的散布情况基本也处于随机分布,其近椭圆圆心是这些点的均值,可以代表分布的整体水平,且OBS的校正位置(B点)与圆心基本重合.B点可以代表在一定误差范围内得出的OBS实际落点位置.综合所有OBS台站多次的校正结果来看,OBS位置校正的误差在20m以内(表 2).
4.3 与前人校正方法对比采用直达水波校正OBS的位置已被普遍使用. OBS位置校正的基本思路都是要找一个与各个炮点的计算走时与OBS记录到的直达水波走时拟合最好(RMS残差最小)的点.校正时关键的控制参数为弹性波在水体的传播速度(可由深度-温度计或者CTD获得)和OBS的深度(精细的多波束数据).根据不同的台站布设方法和仪器本身的差异,有各种具体的校正方法.但比较理想的校正方法的基本思想一般为最小二乘法(射线追踪、曲线拟合)和更高程度的非线性反演(搜索算法、迭代算法、蒙特卡洛方法).相关的数据越多,便能更有效的控制最终计算结果.但在实际校正OBS位置时,人工参与反演(试错法[11]、射线追踪[16])和自动反演(最小二乘法[15]、非线性反演[17~20])都会产生一定的偏差.本文采用的蒙特卡洛方法(反演)从理论上相比其他非线性反演更容易理解,并且统计上保证了结果的稳定性;实际应用中相比人工参与反演具有更高效实用的优点.同时,本文利用二次曲线拟合获取关键的海水层声波传播速度,并用多波束数据进行深度控制,保证了结果与实际情况的吻合.20 m以内的校正精度完全可以满足后期进一步的处理.
5 结论在海上地震数据的采集、整理和初步处理的基础上,完成了10832个炮点的位置校正及实验区A区20台OBS的位置校正,为下一步三维层析成像研究打下了坚实的数据基础,也为后期在南海开展类似的实验提供参考.通过对西南印度洋中脊地震探测实验中的炮点校正与OBS位置校正,得到如下几点认识:
(1)炮点位置校正方法上的改进.三维地震探测不同以往在南海进行的二维人工地震探测.本文主要利用艏向信息对炮点位置进行校正,保证了船在直线行进和转弯过程中炮点的真实位置.炮点位置校正不仅可以提高之后OBS位置校正的准确性,更是为获取精细的三维地震结构提供了保证.
(2)利用多测线的直达水波信息对OBS位置进行校正的方法是有效而准确的.本文结合蒙特卡洛方法与最小二乘法,准确地获得了OBS在海底的实际位置,OBS偏离距一般在1km左右,误差范围为20m以内.OBS记录到的直达水波数据越多,其位置校正结果的准确度越高.校正中还可以得出海水中声波的速度值和OBS实际落点的深度.
(3)对比OBS位置校正前后直达水波的走时曲线特征,发现从OBS记录的原始直达水波走时曲线中可以初步获取OBS的偏离大小,折合处理前后的直达水波走时曲线的对称性是判断校正位置是否准确的重要依据之一.
致谢“大洋一号”DY115-21航次第6航段所有科考队员和全体船员对数据的取得付出了辛勤的劳动,在此表示衷心的感谢!感谢两位审稿人对本文的指正和提出的宝贵意见,并感谢中国科学院南海海洋研究所的朱俊江博士、夏少红博士对本文的建议.
| [1] | Dunn R A, Leki C' V, Detrick R S, et al. Three-dimensional seismic structure of the Mid-Atlantic Ridge (35°N):Evidence for focused melt supply and lower crustal dike injection. J. Geophys. Res. , 2005, 110: B09101. DOI:10.1029/2004JB003473 |
| [2] | Dunn R A, Toomey D R, Solomon S C. Three-dimensional seismic structure and physical properties of the crust and shallow mantle beneath the East Pacific Rsie at 9°30'N. J. Geophys. Res. , 2000, 105(B10): 23537-23555. DOI:10.1029/2000JB900210 |
| [3] | Lees M J. Seismic tomography of magmatic systems. Journal of Volcanology and Geothermal Research , 2007, 167: 37-56. DOI:10.1016/j.jvolgeores.2007.06.008 |
| [4] | Canales J P, Sohn R A, deMartin B J. Crustal structure of the Trans-Atlantic Geotraverse (TAG) segment (Mid-Atlantic Ridge, 26°10'N):Implications for the nature of hydrothermal circulation and detachment faulting at slow spreading ridges. Geochem. Geophys. Geosyst. , 2007, 8(8). DOI:10.1029/2007GC001629 |
| [5] | 孙枢. 将我国深海大洋研究推向新阶段. 地球科学进展 , 2003, 18(5): 653. Su S. Pushing the deep ocean research into a new stage. Advance in Earth Science (in Chinese) , 2003, 18(5): 653. |
| [6] | 田丽艳, 林间. 全球大洋中脊研究十年科学规划(2004~2013). 海洋地质动态 , 2004, 20(3): 10–15. Tian L Y, Lin J. A science and structure plan for ridge research (2004~2013). Marine Geology Letters (in Chinese) , 2004, 20(3): 10-15. |
| [7] | 中国大洋钻探学术委员会. 中国加入综合大洋钻探(IODP)科学计划(2003~2013). 海洋地质动态 , 2004, 20(1): 14–17. China Academic Committee for Ocean Drilling. China's Scientific Program to Take Part in IODP (2003~2013). Marine Geology Letters (in Chinese) , 2004, 20(1): 14-17. |
| [8] | 丘学林, 陈颙, 朱日祥, 等. 大容量气枪震源在海陆联测中的应用:南海北部试验结果分析. 科学通报 , 2007, 52(4): 553–560. Qiu X L, Chen Y, Zhu R X, et al. The application of large volume airgun sources to the onshore-offshore seismic surveys:implication of the experimental results in northern South China Sea. Chinese Science Bulletin (in Chinese) , 2007, 52(4): 553-560. DOI:10.1007/s11434-007-0051-1 |
| [9] | 赵明辉, 丘学林, 夏少红, 等. 大容量气枪震源及其波形特征. 地球物理学报 , 2008, 51(2): 558–565. Zhao M H, Qiu X L, Xia S H, et al. Large volume air-gun sources and its seismic waveform characters. Chinese J. Geophys. (in Chinese) , 2008, 51(2): 558-565. |
| [10] | Peirce C, Day A J. Ocean-bottom seismograph tomographic experiments-a consideration of acquisition geometries vs. resources. Geophys. J. Int. , 2002, 151: 543-565. DOI:10.1046/j.1365-246X.2002.01783.x |
| [11] | 薛彬, 阮爱国, 李湘云, 等. SEDIS-IV型短周期自浮式海底地震仪数据校正方法. 海洋学研究 , 2008, 26(2): 98–102. Xue B, Ruan A G, Li X Y, et al. The seismic data corrections of short period auto-floating ocean bottom seismometer. Journal of Marine Sciences (in Chinese) , 2008, 26(2): 98-102. |
| [12] | White R S, Smith L K, Roberts A W, et al. Lower-crustal intrusion on the North Atlantic continental margin. Nature , 2008, 452: 460-465. DOI:10.1038/nature06687 |
| [13] | Minshull T A, Muller M R, White R S. Crustal structure of the Southwest Indian Ridge at 66°E:seismic constraints. Geophys. J. Int. , 2006, 166: 135-147. DOI:10.1111/gji.2006.166.issue-1 |
| [14] | Christeson G L. OBSTOOL:Software for processing UTIG OBS data. Technical Report No. 134. 1995, University of Texas Institute for Geophysics, Austin, TX |
| [15] | 王彦林, 阎贫, 郑红波, 等. OBS记录的时间和定位误差校正. 热带海洋学报 , 2007, 26(5): 40–46. Wang Y L, Yan P, Zheng H B, et al. Timing and positioning corrections of ocean bottom seismograph data. Journal of Tropical Oceanography (in Chinese) , 2007, 26(5): 40-46. |
| [16] | Tong C H, Barton P J, White R S, et al. Influence of enhanced melt supply on upper crustal structure at a mid-ocean ridge discontinuity:A three-dimensional seismic tomographic study of 9°N East Pacific Rise. J. Geophys. Res. , 2003, 108(B10). DOI:10.1029/2002JB002163 |
| [17] | Oshida A, Kubota R, Nishiyama E, et al. A new method for determining OBS positions for crustal structure studies, using airgun shots and precise bathymetric data. Exploration Geophysics, 2008. 61. (Exploration Geophysics, 2008, 39:15~25; Butsuri-Tansa, 2008, 61:15~25; Mulli-Tamsa, 2008, 11:15~25) |
| [18] | Shiobara H, Nakanishi A, Shimamura H, et al. Precise Positioning of Ocean Bottom Seismometer by Using Acoustic Transponder and CTD. Marine Geophysical Researches , 1997, 19: 199-209. DOI:10.1023/A:1004246012551 |
| [19] | Creager K C, Dorman L M. Location of Instruments on the Seafloor by Joint Adjustment of Instrument and Ship Positions. J. Geophys. Res. , 1982, 87(B10): 8379-8388. DOI:10.1029/JB087iB10p08379 |
| [20] | Hobro J W D, Minshull T A, Singh S C, et al. A three-dimensional seismic tomographic study of the gas hydrate stability zone, offshore Vancouver Island. J. Geophys. Res. , 2005, 110(B09102). DOI:10.1029/2004JB003477 |
| [21] | 阮爱国, 李家彪, 陈永顺, 等. 国产I-4C型OBS在西南印度洋中脊的试验. 地球物理学报 , 2010, 53(4): 1015–1018. Ruan A G, Li J B, Chen Y S, et al. The experiment of broad I-4C type OBS in the Southwest India ridge. Chinese J. Geophys.(in Chinese) (in Chinese) , 2010, 53(4): 1015-1018. |
| [22] | 赵明辉, 丘学林, 李家彪, 等. 慢速、超慢速扩张洋中脊热液区三维地震结构研究展望. 热带海洋学报 , 2010, 29(6): 1–7. Zhao M H, Qiu X L, Li J B, et al. Research development and prospect on three-dimensional seismic structures of slow and, ultraslow spreading ocean ridges. Journal of Tropical Oceanography (in Chinese) , 2010, 29(6): 1-7. |
| [23] | 阮爱国, 丘学林, 李家彪, 等. 中国海洋深地震探测与研究进展. 华南地震 , 2009, 29(2): 10–18. Ruan A G, Qiu X L, Li J B, et al. Wide Aperture Seismic Sounding in the Margin Seas of China. South China Journal of Seismology (in Chinese) , 2009, 29(2): 10-18. |
| [24] | 丘学林, 施小斌, 阎贫, 等. 南海北部地壳结构的深地震探测和研究新进展. 自然科学进展 , 2003, 13(7): 481–488. Qiu X L, Shi X B, Yan P, et al. Recent progress of deep seismic experiments and studies of crustal structure in northern South China Sea. Progress in Natural Science (in Chinese) , 2003, 13(7): 481-488. |
| [25] | 王家映. 地球物理资料非线性反演方法讲座(二), 蒙特卡洛方法. 工程地球物理学报 , 2007, 4(2): 81–85. Wang J Y. Lecture on Non-linear inverse methods in geophysics (second), Monte Carlo Method. Chinese Journal of Engineering Geophysics (in Chinese) , 2007, 4(2): 81-85. |
| [26] | Zelt C A, Forsyth D A. Modeling wide-angle seismic data for crustal structure:Southeastern Grenville Province. J. Geophys. Res. , 1994, 99(B6): 11687-11704. DOI:10.1029/93JB02764 |