 2010, Vol. 53
2010, Vol. 53



直升机航空TEM(time-domain electromagnetic,简称TEM)是一种快速经济的勘查方法,大多采用中心回线方式,具有响应曲线形态简单,可以得到最大的异常响应,异常形态与飞行方向无关,探测深度大、对异常分辨率和空间分辨率高等优点[1].世界上发达国家已经将直升机航空电磁测量系统用于商业化服务.2006年,我国立项开展吊舱式时间域直升机航空电磁勘查系统的研发.吊舱式直升机航空TEM,发射-接收线圈采用刚性连接,被固定在吊舱内,吊舱在测量飞行中,受飞行速度、飞机颠簸、风向等影响,发射-接收线圈的姿态(倾角、方向、高度等)会发生变化,与大地之间的耦合发生变化,给测量的电磁数据带来误差.如果吊舱从平行大地飞行状态翻转为完全垂直大地状态,相当于发射-接收线圈从垂直共中心装置变为水平共中心装置,电磁响应将减小一半,此时测量的电磁数据将产生较大的误差,如果不进行姿态校正,将引进假异常现象,降低地质异常的空间分辨率.
在线圈的姿态校正方面,2004年Y i n等[2, 3]研究了频率域直升机偶极源的姿态影响及校正,国内只开展了电磁响应正演计算方面的研究[4~7],姿态校正方面尚未见相关文献.本文针对直升机航空TEM的中心回线方式,以垂直和水平磁偶极源为基础,推导出了层状大地时间域垂直和水平圆回线航空电磁响应的正演计算公式,并仿真研究了中心回线测量时,线圈姿态变化对电磁响应的影响及校正方法.
2 线圈的姿态(摇摆、俯仰、偏航旋转)为了描述吊舱的旋转变化,我们建立了双直角坐标系[8],如图 1所示,一个是系统坐标系(x,y,z),它与大地表面平行,x轴在飞行方向上水平调直,y轴与飞行方向水平垂直,z轴与飞行方向垂直调直;另一个是吊舱坐标系(x ',y ',z '),它与发射-接收线圈平面重合,x轴在线圈平面上水平调直,y轴与线圈平面水平垂直,z轴与线圈平面垂直调直.当吊舱平直飞行时,吊舱坐标系与系统坐标系重合.

|
图 1 水平层状介质回线源航空电磁探测示意 Fig. 1 Schematic diagram of airborne TEM survey of a loop source on the layered earth |
在直升机进行飞行测量时,可能发生摇摆、俯仰、偏航旋转,如图 2所示.如果直升机离开正常的飞行方向或者是旋转,通过缆绳的传递,导致吊舱绕x '轴旋转,发生摇摆旋转;如果飞行速度发生变化,飞机会出现首尾摇摆,吊舱绕y '轴旋转,则产生俯仰旋转;当吊舱侧面有风吹过,吊舱会绕z '轴旋转,发生偏航旋转.

|
图 2 吊舱内发射-接收线圈的旋转示意 (a)摇摆旋转;(b)俯仰旋转;(c)偏航旋转. Fig. 2 Transmitting and receiving coils rotation in the bird (a) Roll rotation; (b) Pitch rotation; (c) Yaw rotation. |
吊舱的旋转,导致吊舱坐标系与系统坐标系不再重合,吊舱坐标系的x '轴、y '轴或多或少是水平的,z '轴或多或少是垂直的.在吊舱坐标系的发射磁矩、接收感应电压等矢量发生改变时,测量的感应电动势也发生变化.因此,姿态校正的关键是:将旋转后的吊舱坐标系中的变量,变换到系统坐标系下的对应分量.
系统坐标系和吊舱坐标系之间关系,可以用矩阵变换来描述,表示为

|
(1) |
其中vb表示吊舱坐标系下的向量,v i表示系统坐标系下的向量.α,β和γ分别表示摇摆、俯仰和偏航旋转角,Dαβγ为吊舱绕x ',y',z'轴的旋转矩阵,旋转矩阵Dαβγ为

|
当α,β,γ较小时,矩阵可以写为
|
为了计算线圈摇摆、俯仰、偏航旋转时的电磁响应,需要知道发射磁矩和接收分量在两个坐标系的对应关系.
发射磁矩在两个坐标系的关系为
|
(2) |
mx,my,mz分别为系统坐标系的发射磁矩分量,m'x,m'y,m'z分别为吊舱坐标系的发射磁矩分量.
根据法拉第电磁感应定律,接收线圈测量的感应电压在两个坐标系下的关系为

|
(3) |
式中SR为接收线圈的面积,μ 0为磁导率,Hi j为系统坐标下的二次磁场响应,其中i表示磁场分量,j表示场源方向,d i j表示旋转矩阵D中的元素.
3 垂直和水平放置的圆线圈电磁响应从上面分析可知,为了计算线圈姿态变化时的总响应,需要研究不同方向场源激励下的电磁响应.我们以图 1所示的系统坐标系,来研究圆线圈在层状大地所产生的电磁响应.
对于发射磁矩为M=I π a 2的圆形线圈,垂直和水平放置在(0,0,-h)位置时,产生电磁响应,可以通过对磁偶极子的磁矢位进行面积分,得到圆线圈的磁矢位表达式,再根据磁场各分量与磁矢位的关系,最后推导出圆线圈的各分量电磁响应[9~11].
层状大地垂直磁偶极子磁矢位表达式为

|
(4) |
其中,J0为零阶贝塞尔函数.

|
将圆线圈的发射磁矩面积分元d mz=I ρd φdρ代入(4)式中,沿整个圆线圈面积进行积分,有

|
利用J0(m r)的展开式和积分性质,将积分进行整理,得到圆线圈的磁矢位表达式为

|
(5) |
其中,J1为一阶贝塞尔函数,再利用垂直磁偶极源磁场与磁矢位的关系:

|

|

|
采用准静态近似,k 0≈0,将磁矢位表达式代入,得到垂直圆线圈的二次磁场:

|
(6) |

|
(7) |

|
(8) |
其中
推导放置在x方向和y方向水平圆线圈的电磁响应,与垂直圆线圈的推导过程相同.放置在x方向水平磁偶极子的磁矢位表达式为

|
(9) |
水平圆线圈的磁矢位表达式为

|
积分变换后整理,磁矢位写为

|
(10) |
再利用垂直磁偶极源磁场与磁矢位的关系,得到各磁场分量:
|
采用准静态近似,将磁矢位表达式代入,得到水平圆线圈的二次磁场:
|
(11) |
|
(12) |

|
(13) |
为了简化表达式,定义Φ0,G 0,G 1,G 2如下
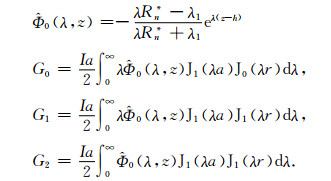
|
进行变量代换,得到放置在x,y,z方向上的圆线圈产生二次磁场各分量表达式:

|
(14) |

|
(15) |
|
(16) |

|
(17) |

|
(18) |
|
(19) |

|
(20) |

|
(21) |
|
(22) |
其中
当采用中心装置时,接收线圈位于r 0 →0,λ r 0 → 0,有ϕ=0,J0(λr→0)=1,


|
(23) |
对比式(23)和式(22)可见,水平放置圆线圈产生的磁场响应是垂直放置圆线圈磁场响应的一半.
本文采用了Guptasarma和Singh提出的汉克尔积分变换算法[12, 13].在计算频率域的电磁场响应时,利用Guptasarma提出的数字滤波方法[14, 15]实现频率域到时间域的转换,再利用法拉第电磁感应定律,计算出接收线圈的二次感应电压值.
4 线圈姿态变化时电磁响应的仿真对于层状大地,在水平方向上,电阻率没有方向变化,线圈参数对偏航旋转是不敏感的,因此,主要计算发射磁矩为m z=(0,0,m'z)的圆线圈在发生摇摆、俯仰旋转时的电磁响应.
4.1 线圈摇摆旋转当吊舱绕着吊舱坐标系中的x '轴旋转α °时,发射-接收线圈将同时发生倾斜,线圈被重新定位,如图 3所示,可以通过变量分解,得到各个方向的发射磁矩分量,或令旋转矩阵Dαβγ中β和γ为零,代入式(2)中,同样可以得到新的发射磁矩,表示为

|
(24) |

|
图 3 吊舱绕x'轴旋转时发射磁矩在双坐标系的变换 Fig. 3 Magnetic moment in the bi-coordinate system when bird rotates around the x'-axis |
将mx,my,mz分别代入式(14)~(22)中,得到Hij=0(i≠j),Hxx=0,

|
(25) |
为了分析线圈姿态变化对电磁响应的影响,定义电磁响应系数为吊舱旋转后电磁响应与吊舱平直飞行时电磁响应的比值,当吊舱绕着它的x '轴旋转后,二次场的电磁响应系数为

|
(26) |
从(26)等式中看到,当吊舱线圈系统是中心装置时,它的旋转影响是纯几何性的,电磁响应比率仅仅依赖于旋转的角度.当α=90 °时,垂直线圈将重新定向到水平圆线圈,根据(26)式,能够得到垂直圆线圈到水平圆线圈响应系数为0.5.根据式(26)可知,姿态变化影响是一个渐变函数,线圈摇摆角从0 °旋转到90 °、再旋转18 0 °,电磁响应首先减小,当减到响应的一半后,开始增大,回到初始值.当α=0 °时,线圈姿态为垂直放置状态,电磁响应系数为1;当α=90 °时,线圈翻转后为水平放置状态,电磁响应系数为0.5,这表明,在中心回线装置下,线圈从垂直放置状态翻转为水平放置状态,电磁响应减少了一半.
4.2 线圈俯仰旋转类似于x'轴旋转,吊舱绕y'轴旋转β °后,圆线圈二次场的电磁响应系数为

|
(27) |
从(27)等式,可以得到和x '轴旋转相同的结论:假设β=90 °,垂直圆线圈与水平圆线圈响应在幅度的比率是0.5.
4.3 线圈摇摆、俯仰旋转当吊舱绕着x '和y '轴旋转时,令旋转矩阵Dαβγ中γ为零,并代入式(2)中,系统坐标系下的发射磁矩为
|
(28) |
将mx,my,mz分别代入式(14)~(22)中,得各发射磁矩分量在中心(x=r→0,y=0)产生的磁场响应为

|
将磁场分量代入式(3)中,总感应电压为

|
(29) |
线圈摇摆、俯仰旋转时的电磁响应系数(α=β=0 °)为

|
(30) |
从(30)式看到,当发射-接收为重叠或中心装置时,摇摆和俯仰旋转对垂直圆线圈的响应有对称的影响;对于层状大地,圆线圈发生偏航时,电磁响应与摆动角无关.
5 俯仰和摆动旋转影响的分析以三层H型模型为例,电阻率分别为10 0 Ωm、10 Ωm、2000 Ωm,厚度分别为400 m、40 m,发射线圈半径为7.5 m,匝数为5,发射电流300 A,接收线圈面积200 m2,吊舱飞行高度为30 m.计算了平直飞行、同时翻转45 °和俯仰45 °角时的电磁响应,如图 4所示,姿态变化后电磁响应比正常飞行的电磁响应减小了1/4.

|
图 4 吊舱平直飞行和旋转时H型层状大地的电磁响应曲线 Fig. 4 H model's secondary magnetic fields response when bird rotation and straight-level flight |
线圈姿态变化,对实测的电磁数据的影响可以通过电磁响应系数来反映. 图 5给出了电磁响应系数随翻转角和俯仰角变化时的曲线,由图可见,当线圈姿态同时发生翻转和俯仰旋转时,导致实测电磁数据产生较大的姿态误差.根据前面的分析,当采用中心回线时,只要精确记录线圈翻转和俯仰角,就可采用公式(24)和(28)进行姿态校正.现在的姿态测量设备可达到0.1 °的记录精度,因此,线圈姿态同样可实现高精度校正.

|
图 5 电磁响应系数随吊舱旋转角度变化曲线 Fig. 5 The changing curve of ratio of the secondary magnetic field response for bird rotation angle |
通过仿真研究表明,对于吊舱式或固定翼式时间域航空电磁测量系统,线圈姿态影响可以通过旋转角度的三角函数关系来描述,姿态误差仅取决于线圈在各个方向的旋转角度,与大地的导电性和发射参数无关.当时间域航空测量系统精确记录发射、接收线圈姿态变化的角度时,可以根据本文推导的电磁响应系数表达式,对实测数据进行姿态误差校正,为野外实测数据姿态校正奠定理论基础.
致谢感谢吉林大学地球信息探测仪器教育部重点实验室提供了研究平台,感谢殷长春研究员的通信指导,感谢航遥中心的陈斌研究员的指导,感谢两位审者对该文的快速认真审稿.
| [1] | 张昌达. 航空时间域电磁法测量系统:回顾与前瞻. 工程地球物理学报 , 2006, 3(4): 265–273. Zhang C D. Airborne time domain electromagnetics system:look back and ahead. Chinese Journal of Engineering Geophysics (in Chinese) , 2006, 3(4): 265-273. |
| [2] | Changchun Yin, Douglas C. Fraserz. Attitude corrections of helicopter EM data using a superposed dipole model. Geophysics , 2004, 69(2): 431-439. DOI:10.1190/1.1707063 |
| [3] | Changchun Yin, Greg Hodges. Influence of displacement currents on the response of helicopter electromagnetic systems. Geophysics , 2005, 70(4): G95-G100. DOI:10.1190/1.1993710 |
| [4] | 罗廷钟, 张胜业, 王卫平. 时间域航空电磁法一维正演研究. 地球物理学报 , 2003, 46(5): 719–724. Luo Y Z, Zhang S Y, Wang W P. A research on one-dimension forward for aerial electromagnetic method In time domain. Chne J. Geophys. (in Chinese) , 2003, 46(5): 719-724. |
| [5] | 王卫平, 王守坦. 直升机频率域航空电磁系统在均匀半空间上方的电磁响应特征与探测深度. 地球学报 , 2003, 24(3): 285–288. Wang W P, Wang S D. Electromagnetic response character of helicopter frequency domain em system above uniform half space and its prospecting depth. Acta Geoscientia Sinica (in Chinese) , 2003, 24(3): 285-288. |
| [6] | 朱凯光, 林君, 刘长胜, 等. 频率域航空电磁法一维正演与探测深度. 地球物理学进展 , 2008, 23(6): 943–1946. Zhu K G, Lin J, Liu C S, et al. One-dimensional forwand and prospecting depth for airborne frequency domain electromagnetic method. Progress in Geophysics (in Chinese) , 2008, 23(6): 943-1946. |
| [7] | 嵇艳鞠, 林君, 于生宝, 等. ATTEM系统中电流关断期间瞬变电磁场响应求解的研究. 地球物理学报 , 2006, 49(6): 884–1890. Ji Y J, Lin J, Yu S B, et al. A study on solution of transient electromagnetic response during transmitting current turn-off in the ATTEM system. Chinese J. Geophys. (in Chinese) , 2006, 49(6): 884-1890. |
| [8] | 陆元九. 陀螺及惯性导航原理. 北京: 科学出版社, 1964 : 22 -23. Lu Y J. Navigation Principle of Whirligig and Inertia (in Chinese). Beijing: Science Press, 1964 : 22 -23. |
| [9] | Nabighian M N. Electromagnetic Methods in Applied Geophysics, Theory. Tulsa: Society of Exploration Geophysicists, 1988 : 206 -216. |
| [10] | Kaufman A A. Harmonic and transient fields on the surface of a two-layermedium. Geophysics , 1979, 44(7): 1208-1217. DOI:10.1190/1.1441003 |
| [11] | Raiche A P. Transient electromagnetic field computations for polygonal loops on layered earths. Geophysics , 1987, 52(6): 785-793. DOI:10.1190/1.1442345 |
| [12] | Anderson W L. A hybrid fast Hankel transform algorithm for electromagnetic modeling. Geophysics , 1989, 54(2): 263-266. DOI:10.1190/1.1442650 |
| [13] | Anderson W L. Fast Hankel transforms using related and lagged convolutions. ACM Transactions on Mathematical Software , 1982, 8(4): 344-368. DOI:10.1145/356012.356014 |
| [14] | Guptasarma D. Computation of the time-domain response of a polarizable ground. Geophysics , 1982, 47(11): 953-963. |
| [15] | Guptasarma D, Smith B S. New digital linear filters for Hankel J0 and J1 transforms. Geophysical Prospecting , 1997, 45: 45-762. |
| [16] | Singh N P, Mogi T. Electromagnetic response of a large circular loop source on a layered earth: A new computation method. Pure Appl Geophys , 2005, 162: 181-200. DOI:10.1007/s00024-004-2586-2 |