


2. 武汉理工大学 航运学院, 武汉 430063
针对莱斯衰落信道下的事件检测问题,在传感器网络中引入三级量化筛选策略,得出了基于信道实时状态信息的似然比融合规则. 考虑到信道实时状态信息往往难以获得,进一步提出了基于莱斯信道统计分布信息的决策融合规则. 并分别在低信噪比和高信噪比条件下给出了2种融合规则的简化形式. 仿真结果表明,三级量化筛选策略不仅可以降低系统传输能耗,而且可以改善系统检测性能. 综合分析发现,上述决策融合规则在检测性能、计算复杂度和耗费系统资源方面各有优劣. 针对资源受限的无线传感器网络,在选取融合规则时,需要折中考虑.
2. School of Navigation, Wuhan University of Technology, Wuhan 430063, China
Considering the problem of event detection in censoring sensor networks, an optimal fusion rule based on the three-level quantization was derived for the mode of Rician fading channels. However, the optimal fusion rule requires instantaneous channel state information which may be too costly for resource-constrained sensor networks. A sub-optimal alternative with the knowledge of channel statistics was proposed. To further simplify the fusion rules, three simple approximations were also presented. Simulations show that, by the proposed censoring strategy, the goal of energy saving and performance improvement can be achieved. In addition, the performance analysis and comparision between different fusion rules show that in resource-constrained sensor networks, a tradeoff between detection performance and the requirement on system resource should be considered when choosing the fusion rules.
无线传感器网络由大量能够感知环境参数的传感器节点组成,这些节点通过无线通信方式形成自组织网络,可广泛应用于环境监测与保护、医疗护理、目标跟踪及军事侦测等领域. 由于传感器节点所处环境往往较为复杂以及成本限制等原因,单个传感器的观测信息并不能直接反映感知对象的真实物理状态,据其可能做出错误判决. 为了降低节点误判对系统整体性能的影响,可以利用决策融合技术对多个传感器的判决信息进行融合,以获得对同一事件更完全、更准确的描述[1]. 与传统的分布式决策融合不同,无线传感器网络中的决策融合要考虑节点能量受限、系统资源受限以及信道衰落的影响. 为了降低传输能耗,Rago等[2]针对低传输速率环境,提出了仅当传感器判决有事件发生时才向融合中心发送信息的筛选传输策略. 在此基础上,Cheng等[3]提出了三级量化的传输策略,并与传统的传输策略进行了比较. Wang等[4] 进一步对传感器个数未知条件下的决策融合问题进行了研究,并给出了最优筛选概率的选取方法. 考虑到无线信道对局部决策传输的影响,一些学者结合信道信息对带宽受限并行无线传感器网络决策融合问题进行了研究[5, 6]. 上述文献的研究工作均是基于瑞利衰落信道模型进行的. 瑞利衰落信道模型适用于传感器与融合中心之间只有散射,不存在视距传播的情形. 如果存在视距传播,则可以建模为莱斯衰落信道. 笔者在莱斯衰落信道模型下,对使用三级量化筛选策略的传感器网络决策融合问题进行了研究,并给出了理论分析和仿真结果.
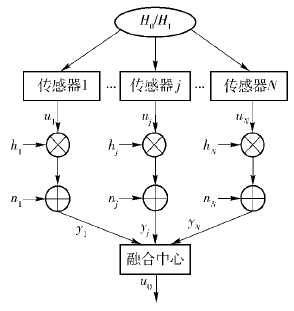
1 系统模型与问题描述分布式传感器网络决策融合系统由传感器节点、无线信道及融合中心3部分组成,如图1所示. 系统中有N个传感器节点,所观测的事件称为H,H1表示有事件发生,H0表示没有事件发生.
|
图1 分布式传感器网络决策融合系统模型 |
在三级量化筛选策略下,传感器观测值经量化后输出局部判决为
| $ {u_j} = \left\{ \begin{array}{l} 1,\;\;{Z_j} > {\theta _{{1_j}}}\\ - 1,\;\;\;\;\;\;{Z_j} > {\theta _{{0_j}}}\\ 0,{\rm{其他}} \end{array} \right. $ | (1) |
其中:θ0j、θ1j为量化区间的端点,Zj为传感器观测值. 此时,传感器的检测概率和虚警概率分别为pdj=P(uj=1|H1)和pfj=P(uj=1|H0). 定义传感器筛选概率为pcj=P(H1)q1j+P(H0)q0j,其中q1j=P(uj=0|H1),q0j=P(uj=0|H0),P(H0)、P(H1)分别为H0、H1发生的先验概率.
局部判决uj经无线信道后输出为
| $ {y_i} = {h_i}{u_j} + {n_j},i = 1,2,\cdots ,N $ | (2) |
其中:hj为信道增益,这里服从莱斯分布;nj为信道噪声,且服从均值为0、方差为σ2的高斯分布. 将传输信号的平均能量标准化,则hj的概率密度函数为
| $ \begin{array}{l} P\left( {{h_j}} \right) = 2\left( {1 + K} \right){e^{ - K}}{h_j}{e^{ - \left( {1 + K} \right)h_j^2}}{I_0}\left( {2\sqrt {K\left( {1 + K} \right)} {h_j}} \right),\\ \;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;\;{h_j} \ge 0 \end{array} $ | (3) |
其中:I0(·)为第一类零阶修正贝塞尔函数,K为莱斯因子.
融合中心接收到y1,…,yj,…,yN后,根据融合规则做出全局决策u0. 融合系统的检测错误概率为
| $ {p_e} = P\left( {{H_1}} \right)P\left( {{u_0} = 0|{H_1}} \right) + P\left( {{H_0}} \right)P\left( {{u_0} = 1|{H_0}} \right) $ | (4) |
在三级量化筛选策略下,通过改变筛选概率值,可以得到不同的检测错误概率. 当检测错误概率最小时,筛选概率值达到最优. 根据检测错误概率随筛选概率变化的关系曲线,可以比较不同融合算法的性能,并获得最优的筛选概率值.
2 决策融合规则 2.1 基于信道实时状态信息的决策融合规则假设各个传感器的观测相互独立,且信道实时状态信息(CSI,channel state information)和节点性能参数已知,则融合中心的似然比融合规则ΛCSI为
| $ \begin{array}{*{20}{c}} {{\Lambda _{CSI}} = }\\ {\sum\limits_{j = 1}^N {\ln } \frac{{{e^{ - \frac{{{{\left( {{y_j} - {h_j}} \right)}^2}}}{{2{\sigma ^2}}}}}p{d_j} + {e^{ - \frac{{y{j^2}}}{{2{\sigma ^2}}}}}{q_{{1_j}}} + {e^{ - \frac{{{{\left( {{y_j} - {h_j}} \right)}^2}}}{{2{\sigma ^2}}}}}\left( {1 - {p_{{d_j}}} - {q_{{1_j}}}} \right)}}{{{e^{ - \frac{{{{\left( {{y_j} - {h_j}} \right)}^2}}}{{2{\sigma ^2}}}}}{p_{{f_j}}} + {e^{ - \frac{{y{j^2}}}{{2{\sigma ^2}}}}}{q_{{0_j}}} + {e^{ - \frac{{{{\left( {{y_j} + {h_j}} \right)}^2}}}{{2{\sigma ^2}}}}}\left( {1 - {p_{{f_j}}} - {q_{{0_j}}}} \right)}}} \end{array} $ | (5) |
进一步在低信噪比和高信噪比条件下对融合规则ΛCSI进行近似处理,可以得到2种简化的融合规则.
1) 当SNR→0时,融合规则ΛCSI可以近似为融合规则Λ1,即
| $ {\Lambda _1} = \sum\limits_{j = 1}^N {\frac{{{h_j}{y_j}}}{{{\sigma ^2}}}} \left( {2{p_{{d_j}}} - 2{p_{{f_j}}} + {q_{{1_j}}} - {q_{{0_j}}}} \right) $ | (6) |
如果各个节点的性能参数相同,Λ1可进一步简化为融合规则ΛMRC(maximum ratio combiner),即
| $ {\Lambda _{MRC}}{\rm{ = }}\frac{1}{N}\sum\limits_{j = 1}^N {{h_j}{y_j}} \begin{array}{*{20}{c}} {{H_1}}\\ > \\ < \\ {{H_0}} \end{array}{\tau _{MRC}} $ | (7) |
其中τMRC为判决门限.
融合规则ΛMRC无须节点性能参数,与融合规则ΛCSI相比,需要预知的信息更少,计算量也更小.
2) 当SNR→∞时,融合规则ΛCSI可以近似为融合规则ΛCV(Chair-Varshney),即
| $ {\Lambda _{CV}} = \sum\limits_{\left\{ {j:{y_j} > 0} \right\}} {\ln \frac{{{p_{{d_j}}}}}{{{p_{{f_j}}}}}} + \sum\limits_{\left\{ {j:{y_j} < 0} \right\}} {\ln \frac{{1 - {p_{{d_j}}} - {q_{{1_j}}}}}{{1 - {p_{{f_j}}} - {q_{{0_j}}}}}} $ | (8) |
融合规则ΛCV仅需节点性能参数,因而对系统要求更低. 但在低信噪比时,由于算法的近似处理,检测性能会有所降低.
2.2 基于信道统计分布信息的决策融合规则似然比融合规则ΛCSI在理论上是最优的[7],但它需要知道CSI,实现起来较为困难. 融合规则ΛMRC和ΛCV虽然算法简单,容易实现,但检测性能与最优算法还有一定的差距. 为此,下面寻求替代CSI进行似然比决策融合的方法,即推导基于莱斯信道统计分布信息的次优决策融合规则.
当信道增益服从单位功率的莱斯分布时,Wang等[8]给出条件概率密度为
| $ \begin{array}{l} P\left( {{y_i}|{u_j}} \right) = \frac{{2\left( {1 + K} \right){e^{ - K}}}}{{\sqrt {2\pi } \sigma }}{e^{ - \frac{{y_j^2}}{{4t{\sigma ^2}}}}}\sum\limits_{i = 0}^\infty {\frac{{{{\left( {K + {K^2}} \right)}^i}}}{{{{\left( {i!} \right)}^2}}}{{\left( {\frac{t}{{{\sigma ^2}}}} \right)}^{ - \left( {i + 1} \right)}}.} \\ \;\;\;\;\;\;\;\;\;\;\Gamma \left( {2i + 2} \right){e^{\frac{{y_j^2}}{{4t{\sigma ^2}}}}}{D_{ - \left( {2i + 2} \right)}}\left( {\frac{{ - {u_j}{y_j}}}{{\sigma \sqrt t }}} \right) \end{array} $ | (9) |
其中:t=1+2(1+K)σ2,Γ(·)为伽玛函数,Dn(·)为抛物圆柱面函数.
由式(9)可以计算条件概率密度P(yj|H0)和P(yj|H1),进一步可以得到基于信道统计分布信息的决策融合规则ΛCS(channel statistics),即
| $ {\Lambda _{CS}} = \sum\limits_{j = 1}^N {\ln \frac{{2\left( {1 + K} \right){e^{ - K}}{e^{\frac{{y_j^2}}{{4t{\sigma ^2}}}}}\sum\limits_{i = 0}^\infty {\xi \left( i \right)} \left[{{p_{{d_j}}}{D_{ - \left( {2i + 2} \right)}}\left( {\frac{{ - {y_j}}}{{\sigma \sqrt t }}} \right) + \left( {1 - {p_{{d_j}}} - {q_{{1_j}}}} \right){D_{ - \left( {2i + 2} \right)}}\left( {\frac{{{y_i}}}{{\sigma \sqrt t }}} \right)} \right] + {q_{{1_j}}}}}{{2\left( {1 + K} \right){e^{ - K}}{e^{\frac{{y_j^2}}{{4t{\sigma ^2}}}}}\sum\limits_{i = 0}^\infty {\xi \left( i \right)} \left[{{p_{{f_j}}}{D_{ - \left( {2i + 2} \right)}}\left( {\frac{{ - {y_j}}}{{\sigma \sqrt t }}} \right) + \left( {1 - {p_{{f_j}}} - {q_{{0_j}}}} \right){D_{ - \left( {2i + 2} \right)}}\left( {\frac{{{y_i}}}{{\sigma \sqrt t }}} \right)} \right] + {q_{{0_j}}}}}} $ | (10) |
其中 $\xi \left( i \right) = \frac{{{{\left( {K + {K^2}} \right)}^i}}}{{{{\left( {i!} \right)}^2}}}{\left( {\frac{t}{{{\sigma ^2}}}} \right)^{ - \left( {i + 1} \right)}}\Gamma \left( {2i + 2} \right). $
当SNR→0时,ΛCS可进一步近似为融合规则Λ2,即
| $ \begin{array}{l} {\Lambda _2} = \sum\limits_{j = 1}^N {\left\{ {\ln \frac{{{Q_{{1_j}}}}}{{{Q_{{0_j}}}}} + {y_j}\frac{{\sqrt {2\pi } \left( {4 + K} \right){e^{ - K}}}}{{8\sigma \sqrt t }}} \right.} .\\ \;\;\;\;\;\;\;\;\left. {\left[{\frac{{2{p_{{d_j}}} + {q_{{1_j}}} - 1}}{{{Q_{{1_j}}}}} - \frac{{2{p_{{f_j}}} + {q_{{0_j}}} - 1}}{{{Q_{{0_j}}}}}} \right]} \right\} \end{array} $ | (11) |
其中Q0j和Q1j分别定义为
| $ {Q_{{0_j}}} = \left( {1 + K} \right){e^{ - K}}\left( {1 - {q_{{0_j}}}} \right) + {q_{{0_j}}} $ | (12) |
| $ {Q_{{1_j}}} = \left( {1 + K} \right){e^{ - K}}\left( {1 - {q_{{1_j}}}} \right) + {q_{{1_j}}} $ | (13) |
证明 当SNR→0时,σ→∞,仅保留 $\sum\limits_{i = 0}^\infty {\xi \left( i \right){D_{ - \left( {2i + 2} \right)}}\left( {\frac{{ - {y_j}}}{{\sigma \sqrt t }}} \right)} $中的前2项,有
| $ \sum\limits_{i = 0}^\infty {\xi \left( i \right){D_{ - \left( {2i + 2} \right)}}\left( {\frac{{ - {y_j}}}{{\sigma \sqrt t }}} \right)} \approx \frac{{{D_{ - {\rm{2}}}}\left( {\frac{{ - {y_j}}}{{\sigma \sqrt t }}} \right){\rm{ + 3K}}{{\rm{D}}_{ - 4}}\left( {\frac{{ - {y_j}}}{{\sigma \sqrt t }}} \right)}}{{{\rm{2 + 2}}K}} $ | (14) |
由 $\mathop {\lim }\limits_{x \to 0} {D_{ - n}}\left( x \right) = a + bx,a = \frac{{\sqrt x }}{{{2^{n/2}}\Gamma \left( {\frac{{n + 1}}{2}} \right)}},b = - \frac{{\sqrt {2\pi } }}{{{2^{n/2}}\Gamma \left( n \right)}} $可得
| $ \sum\limits_{i = 0}^\infty {\xi \left( i \right){D_{ - \left( {2i + 2} \right)}}\left( {\frac{{ - {y_j}}}{{\sigma \sqrt t }}} \right)} \approx \frac{1}{2} + {y_j}\frac{{\sqrt {2\pi } \left( {4 + K} \right)}}{{16\sigma \sqrt t \left( {1 + K} \right)}} $ | (15) |
同理,有
| $ \sum\limits_{i = 0}^\infty {\xi \left( i \right){D_{ - \left( {2i + 2} \right)}}\left( {\frac{{{y_j}}}{{\sigma \sqrt t }}} \right)} \approx \frac{1}{2} - {y_j}\frac{{\sqrt {2\pi } \left( {4 + K} \right)}}{{16\sigma \sqrt t \left( {1 + K} \right)}} $ | (16) |
将式(15)和式(16)代入式(10),应用近似公式 $\mathop {\lim }\limits_{x \to 0} \lg \left( {1 + x} \right) = x$,可得
| $ \begin{array}{*{20}{c}} {{\Lambda _{CS}} \approx }\\ {\sum\limits_{j = 1}^N {\ln } \frac{{{Q_{{1_j}}}\left[{1 + \frac{{{y_j}\sqrt {2\pi } \left( {4 + K} \right){e^{ - K}}\left( {2{p_{{d_j}}} + {q_{{1_j}}} - 1} \right)}}{{8\sigma \sqrt t {Q_{{1_j}}}}}} \right]}}{{{Q_{{0_j}}}\left[{1 + \frac{{{y_j}\sqrt {2\pi } \left( {4 + K} \right){e^{ - K}}\left( {2{p_{{f_j}}} + {q_{{0_j}}} - 1} \right)}}{{8\sigma \sqrt t {Q_{{0_j}}}}}} \right]}}}\\ {\sum\limits_{j = 1}^N {\left\{ {\ln \frac{{{Q_{{1_j}}}}}{{{Q_{{0_j}}}}} + {y_i}\frac{{\sqrt {2\pi } \left( {4 + K} \right){e^{ - K}}}}{{8\sigma \sqrt t }} \times } \right.} }\\ {\left. {\left[{\frac{{2{p_{{d_j}}} + {q_{{1_j}}} - 1}}{{{Q_{{1_j}}}}} - \frac{{2{p_{{f_j}}} + {q_{{0_j}}} - 1}}{{{Q_{{0_j}}}}}} \right]} \right\}} \end{array} $ |
当节点性质相同时,Q0j和Q1j也是常数,即Q0j=Q0,Q1j=Q1,略去常数项,Λ2可进一步简化为ΛEGC(equal gain combiner),即
| $ {\Lambda _{EGC}} = \frac{1}{N}\sum\limits_{j = 1}^N {{y_j}} \begin{array}{*{20}{c}} {{H_1}}\\ > \\ < \\ {{H_0}} \end{array}{\tau _{EGC}} $ | (17) |
其中τEGC为判决门限.
可见,融合规则ΛEGC需要预知的信息最少,算法最简单. 但是,在高信噪比时,由于算法的近似处理,检测性能会有所下降.
3 性能分析与仿真结果 3.1 融合规则ΛMRC和ΛEGC的性能分析当各个传感器观测独立且检测性能相同时,融合规则ΛMRC和ΛEGC的统计量将是一系列独立同分布的随机变量之和. 如果N较大,根据中心极限定理,ΛMRC和ΛEGC的统计量近似服从正态分布. 表1给出了H0和H1条件下ΛMRC和ΛEGC统计量的均值和方差. 利用高斯近似,可得ΛMRC和ΛEGC的检测错误概率为
| 表1 H0和H1条件下ΛMRC和ΛEGC统计量的均值和方差 |
| $ \begin{array}{*{20}{c}} {{P_{{e_{MRC}}}} = }\\ {P\left( {{H_0}} \right)Q\left( {\frac{{{\tau _{MRC}} - {\mu _{{0_{MRC}}}}}}{{{\sigma _{{0_{MRC}}}}}}} \right) + P\left( {{H_1}} \right)\left[{1 - Q\left( {\frac{{{\tau _{MRC}} - {\mu _{{1_{MRC}}}}}}{{{\sigma _{{1_{MRC}}}}}}} \right)} \right]} \end{array} $ | (18) |
| $ \begin{array}{*{20}{c}} {{P_{{e_{EGC}}}} = }\\ {P\left( {{H_0}} \right)Q\left( {\frac{{{\tau _{EGC}} - {\mu _{{0_{EGC}}}}}}{{{\sigma _{{0_{EGC}}}}}}} \right) + P\left( {{H_1}} \right)\left[{1 - Q\left( {\frac{{{\tau _{EGC}} - {\mu _{{1_{EGC}}}}}}{{{\sigma _{{1_{EGC}}}}}}} \right)} \right]} \end{array} $ | (19) |
其中
| $ {\tau _{MRC}} = \frac{{{\sigma ^2}}}{{N\left( {2{p_d} - 2{p_f} + {q_1} - {q_0}} \right)}}\ln \frac{{P\left( {{H_0}} \right)}}{{P\left( {{H_1}} \right)}} $ | (20) |
| $ {\tau _{EGC}} = \frac{{8\sigma \sqrt t \ln \left[{{{\left( {\frac{{{Q_0}}}{{{Q_1}}}} \right)}^N}\frac{{P\left( {{H_0}} \right)}}{{P\left( {{H_1}} \right)}}} \right]}}{{\sqrt {2\pi } N\left( {4 + K} \right){e^{ - K}}\left( {\frac{{2{p_d} + {q_1} - 1}}{{{Q_1}}} - \frac{{2{p_f} + {q_0} - 1}}{{{Q_0}}}} \right)}} $ | (21) |
本节使用Matlab7.11对各个融合规则进行仿真,Monte Carlo仿真次数为106次. 假设H0和H1等概率发生,节点观测值服从高斯分布,有H0∶Zj~N(0,1),H1∶Zj~N(m,1),且各个节点性质相同,传感器个数N=20.
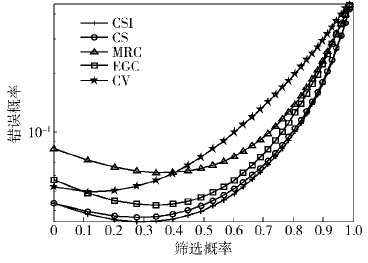
图2为通过Monte Carlo仿真得到的检测错误概率随筛选概率变化的曲线,此时莱斯因子K=2,信道信噪比为10dB,观测信号强度m=1. 图2中,当筛选概率值为0时,对应于无筛选的传统传输策略. 随着筛选概率值的增加,检测错误概率先减小后增加. 曲线最低点对应的筛选概率为最优筛选概率,此时系统检测错误概率达到最小. 这表明,三级量化筛选策略的引入可以改善系统的检测性能. 同时,当传感器判决为0时,不用传输判决信息,从而有效降低了系统传输能耗. 表2是在不同信噪比情况下,当传感器筛选概率设定为pc=0.1时,5种融合规则的检测错误概率的比较结果. 由图2和表2的仿真结果看,ΛCSI的检测错误概率最小,性能最好;ΛCS性能其次,但与ΛCSI非常接近. 进一步比较3种简化的融合规则,在高信噪比时,ΛCV检测性能较好;在低信噪比时,ΛMRC检测性能却较好;而ΛEGC在整个信噪比范围内均有较好的性能,鲁棒性不错.
|
图2 不同融合规则的错误概率曲线 |
| 表2 不同融合规则的检测错误概率比较 |
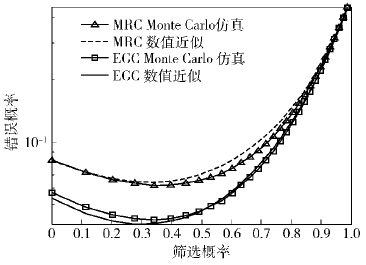
图3为分别通过Monte Carlo仿真和数值近似得到的融合规则ΛMRC和ΛEGC的检测错误概率曲线. 由图3可以看出,在筛选概率较小时,ΛMRC的Monte Carlo仿真曲线与数值近似曲线吻合程度较为理想;
|
图3 ΛMRC、ΛEGC的错误概率曲线 |
而在筛选概率较大时,ΛEGC的Monte Carlo仿真曲线与数值近似曲线吻合程度良好.
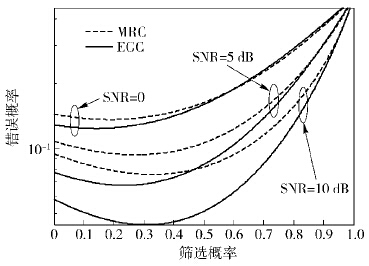
图4为检测错误概率与信噪比的关系曲线,此时K=1,m=1. 由图4可知,随着信噪比增大,最优筛选概率也相应增加. 这是由于信噪比越大,信道越可靠,此时传感器的错误判决经过信道传输后会直接造成系统检测性能的下降,因而有必要通过增加筛选概率来降低传输错误判决的可能性.
|
图4 检测错误概率与信噪比的关系 |
图5为检测错误概率与观测信号强度m的关系曲线,此时K=3,SNR为5dB. 由图5可知,随着m的增加,最优筛选概率值却相应减小. 这是由于m值越大,观测信号越可靠,传感器误判的可能性就越低,此时筛选概率也应该相应降低,以便尽可能多地传输节点判决信息.
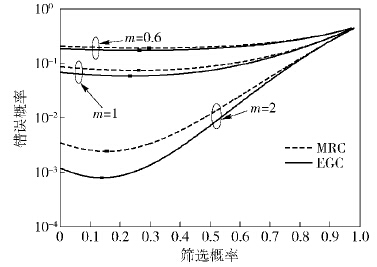
|
图5 检测错误概率与m的关系 |
笔者研究了三级量化筛选策略下的传感器网络决策融合问题,给出了基于CSI的最优融合规则以及基于莱斯信道统计分布信息的次优融合规则,并对上述融合规则进行了简化. 通过理论分析和仿真实验比较了这几种融合规则在检测性能、计算复杂度和耗费系统资源方面的优劣,并探讨了最优筛选概率与信道信噪比、观测信号强度的关系.
| [1] | 韩崇昭, 朱洪艳, 段战胜. 多源信息融合[M]. 2版. 北京: 清华大学出版社, 2010: 1-2. Han Chongzhao, Zhu Hongyan, Duan Zhansheng. Multi-source information fusion[M]. 2nd ed. Beijing: Tsinghua University Press, 2010: 1-2.[引用本文:1] |
| [2] | Rago C, Willett P K, Bar-Shalom Y. Censoring sensors: a low-communication-rate scheme for distributed detection[J]. IEEE Transactions on Aerospace and Electronic Systems, 1996, 32(2): 554-568.[引用本文:1] |
| [3] | Cheng Victorw, Wang Tsangyi. Performance analysis of distributed decision fusion using a censoring scheme in wireless sensor networks[J]. IEEE Transactions on Vehicular Technology, 2010, 59(6): 2845-2851.[引用本文:1] |
| [4] | Wang Tsangyi, Wu Jwoyuh. Does more transmitting sensors always mean better decision fusion in censoring sensor networks with an unknown size[J]. IEEE Transactions on Communications, 2012, 60(8): 2313-2324.[引用本文:1] |
| [5] | 李燕君, 王智, 孙优贤. 资源受限的无线传感器网络基于衰减信道的决策融合[J]. 软件学报, 2007, 18(5): 1130-1137. Li Yanjun, Wang Zhi, Sun Youxian. Decision fusion under fading channel in resource-constrained wireless sensor networks[J]. Journal of Software, 2007, 18(5): 1130-1137.[引用本文:1] |
| [6] | Ciuonzo D, Rossi P S. Decision fusion with unknown sensor detection probability[J]. IEEE Signal Processing Letters, 2014, 21(2): 208-212.[引用本文:1] |
| [7] | Niu Ruixin, Chen Biao, Varshney P K. Fusion of decisions transmitted over Rayleigh fading channels in wireless sensor networks[J]. IEEE Transactions on Signal Processing, 2006, 54(3): 1018-1027.[引用本文:1] |
| [8] | Wang Ying, Xiong Mudi, Yue Dianwu, et al. Decision fusion rules over Rician fading channel for wireless sensor networks[C]//WiCom 2009. Beijing: IEEE Press, 2009: 1-4.[引用本文:1] |