


通过车-路通信构建协作型交叉路口防碰撞安全预警系统, 能保证车辆在交叉路口行驶过程安全的同时, 提高交叉路口的通行率, 然而车辆防碰撞安全预警需要对车辆行驶路线进行准确地估计, 当车辆有碰撞危险时, 需要给出安全速度区间, 通知车辆减速或制动.为解决这一问题, 提出了交叉路口道路时空网格车辆避碰算法, 其基本思想是将交叉路口划分为多个网格, 利用路侧单元根据车辆当前车速、方向预测车辆行驶轨迹即车辆所占的网格数, 若在某一时刻两车占用相同的网格则会发生碰撞, 此时根据车辆当前的运动状态给出车辆能避开冲突的安全速度建议.为了对算法进行验证, 在无信号灯交叉路口和有信号灯交叉路口环境中对所提出的算法进行了仿真实验和真实测试, 实验结果表明, 所提出的算法能准确预判出在交叉路口处于潜在碰撞危险中的车辆, 并给予车速建议, 证明了该系统的有效性和准确性.
Nowadays, the development of wireless communications technology makes vehicle-road communication possible. Building vehicle-road communication based cooperative intersection collision avoidance systems can ensure the safety of vehicles traveling at an intersection and improve the passing rate of the intersection, however, vehicle collision warning system needs accurately estimating the vehicle's route, when vehicle's in danger, giving the safe speed range and informing the vehicle to decelerate or brake. A grid-based space-time synchronization algorithm for vehicle collision avoidance warning is proposed, which will divide the intersection into several grids. Roadside unit through the vehicle velocity, direction and attribute to determine the vehicle trajectory, which is the vehicle occupied grid number. If two vehicles occupy the same grid at the same moment, the risk of collision will occur. Then the unit gives a safe speed based on the state of motion of the vehicle to the vehicle to avoid the collision. To test the algorithm, the algorithm is simulated and truly tested in the scenario of intersection with signal lights and intersection without signal lights. Experimental results demonstrate the proposed algorithm can accurately detect the vehicles which are in potential collision in the intersection and give the advised speed. The results also demonstrate the effectiveness and accuracy of the system.
城市交通道路中的交叉路口被认为是交通事故发生率较高的地区[1].车联网作为目前世界道路交通领域的研究前沿之一,是解决交叉路口车辆安全行驶的有效手段[2].现今很多基于车联网的车-路协作式碰撞预警概念和原型已经被提出[3-6],然而这些系统面临两方面的挑战:① 如何精确预测车辆运行轨迹;② 已经判断车辆在交叉路口存在碰撞危险时,并没有给出车辆行驶的速度建议,使得车速无法调整到安全速度区间.
为了解决以上问题,笔者提出了基于交叉路口道路时空网格车辆防避碰算法.该算法预测车辆运行轨迹,在车辆发生事故前发送预警消息,给出车辆安全速度区间,进行有效的碰撞危险规避,保证车辆在交叉路口行驶的安全性.
1 基于道路时空网格冲突判定机制的车辆轨迹预测与速度建议预警系统所包含的单元如下.
1) 路侧单元:与交叉路口区间内的车辆进行信息交互,获取车辆的实时状态信息;通过通信单元给车辆发送安全预警信息.
2) 车载单元:车辆进入路口区间时,车载单元将车辆的状态信息实时发送给路侧单元;接收路侧单元预警信息提示,进行车速调节,避免车辆碰撞;离开路口区域结束与路侧单元的信息交互.
3) 通信单元:路侧单元和车辆进行信息传输的载体.
基于道路时空网格的车辆冲突判定算法,计算车辆之间在交叉路口发生碰撞的可能性以及相应的避险安全速度:首先,将交叉路口划分为粒度n×m的小区域网格,如图 1所示,车辆进入交叉路口区域后,通过未来某个时刻,车辆物理形态占用网格数中是否存在相同的1个或1组小区域网格来判定是否会发生潜在碰撞冲突;其次,此时车辆与路侧单元之间的通信进入锁定状态,只维持车载单元与路侧单元之间的预警信息的交互,并且车载单元以周期100 ms,获取车辆自身位置、占据的网格数、速度、转向和前进方向等信息发送给路侧单元;再次,路侧单元以周期100 ms接收到路口中车辆状态信息,依据预警避险算法,判断车辆间通过交叉路口时,是否会发生潜在碰撞危险,若存在碰撞危险,比较车辆到冲突点所在网格,真实距离与车辆使用最大减速度至车辆停止的最小距离之间的关系,得出冲突的程度,并给出车辆行驶的安全速度区间;从次,路侧单元基于车辆碰撞危险的事件触发,广播预警信息及减速建议给车载单元,提醒车辆驾驶员,进行减速规避碰撞风险;最后,车辆离开交叉路口区域后,解除路侧单元与车载单元之间的通信锁定.

|
图 1 交叉路口网格划分图 |
在实际交叉路口划分中,粒度n和m的取值某种程度上也影响着预警系统的性能(图 1(a)中n=m=8,图 1(b)中n=m=9).在图 1(a)中不会发生冲突的车辆1和2,由于图 1(b)中划分粒度较小,车辆1和车辆2需要占用灰色网格,预警系统判断其会发生冲突.虽然越小粒度划分更加能保证系统精度,然而当交叉路口车辆趋近饱和时,车辆潜在冲突将会增多,导致更多计算和通信,降低预警系统的整体性能;另外,网格粒度划分是根据路口情况划分的,在一定程度已经可以有效保证系统的准确性.因此,采用文献[7-8]中给出适当粒度划分方式,双向四车道网格划分数为8~15,双向六车道为12~20,可以保证预警系统的性能.
1.1 交叉路口及车辆信息路口确认线到路口的距离为d,交叉路口划分为n×m网格,并建立直角坐标系,如图 2所示.

|
图 2 交叉路口及车辆信息 |
车辆的状态用向量k=(x, y, h, w, L, v, a, f, θ, φ)表示,其中:x、y为以交叉路口建立坐标系的车辆的横纵坐标,h、w为车身的长度和宽度,L为车辆前轴到车辆后轴的距离,v为车辆行驶速度,a为车辆行驶加速度,f为车辆行驶方向,φ为车轮某时刻的转向角,θ为车身某时刻的转向角,如图 2(b)所示.
1.2 安全预警算法车辆在交叉路口中行驶时,由于车速各不相同,对车与车之间的冲突进行检测,只要求出两运动车辆之间的冲突时间,然后与避险时间相比较,就可确定其冲突严重程度.根据冲突程度及此时车辆速度,提示车辆应该采取相应减速避险行动.
1) 车辆占用网格
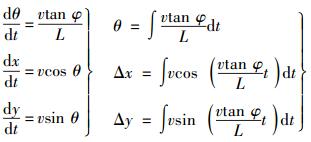
车辆进入交叉路口网格中时,通过GPS获得起始t0时刻车辆的坐标Z(x0,y0);通过车辆内部传感器获得此刻的车辆前轮转动的转向角φ、车辆速度v和加速度a;已知车辆h、w和L.车辆中轴线与x轴夹角θ可用式(1) 计算,如图 2(b)所示.
|
(1) |
车辆下一时刻ti(i=1, 2, 3…)坐标Z(xi,yi)为
|
(2) |
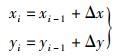
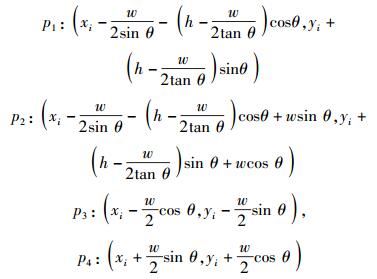
根据ti时刻的车辆坐标Z(xi,yi)、夹角θ、车长h和车宽w得出车辆此时4个角的顶点(p1、p2、p3和p4坐标(见图 3)为
|

|
图 3 车辆占用网格 |
利用车辆的4个点坐标可以得出此时所占网格数目:车辆4个顶点所在网格向外辐射,圈定图 3(a)中灰色网格区域,计算出车辆所占网格的数组为R,然而在实际交叉路口中由于环境等因素会造成GPS信息的扰动,产生误差,为了解决上述问题,每个车辆都设计了一个扩展的卡尔曼滤波器,称为“自估计器”.当自估计器发现GPS定位信息出现扰动时,在预判过程中引入缓冲域概念,扩大车辆占用范围,降低发生碰撞的可能性,如图 3(b)所示.
2) 车辆轨迹预测方程
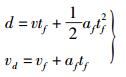
车辆到达路口区域线时,如图 2(a)中A点位置,此刻的速度为vf、加速度为af和时间为tf,车辆轨迹预测分为以下两部分.
① 车辆从路口区域线(图 2(a)中A点)到路口(图 2(a)中B点)的轨迹,根据两点间的距离d,车辆到达路口区域线时的vf、af和tf,得出到达路口时速度vd和时间t0=tf+td,如式(3) 所示.
|
(3) |
② 车辆在交叉路口网格中(车辆在图 2(a)中B点开始进入路口网格)行驶轨迹,通过刚进入路口时车辆的速度vd和到达时间t0,判断车辆在未来某个时刻ti是否会占用相同的网格进而发生碰撞,如若发生碰撞,则此时的时间ti为冲突时间.
3) 车辆冲突程度界定
车载单元接收到路侧单元发送的预警信息,以最大减速度进行减速(以干燥沥青路面的小型车减速度7.4 m/s2为例),到达冲突点速度为v,则避险时间T1.71+0.14v.比较避险时间和冲突时间之间关系,可以得出车辆间冲突程度:0<e≤0.5严重(红色);0.5<e≤1中度严重(黄色);e>1轻度(绿色)[1].根据冲突程度不同,车载单元给驾驶员提示不同等级预警信息.
4) 车辆冲突避让规则
无信号交叉路口场景,由于路口复杂性,车辆冲突数和冲突种类要多于有信号交叉路口,因此以无信号交叉路口中避让规则为例进行介绍.在无信号交叉路口中车辆冲突主要分为4类:直行与直行碰撞,左转与直行碰撞,左转与对向行车碰撞,右转与直行碰撞和追尾碰撞.在无信号交叉路口中,驾驶员基于利己行为会抢先通行,因此在判断出潜在车辆冲突种类之后,需要确定车辆通行优先规则[1]:直行>左侧左转;右侧右转>直行;右侧直行>直行;直行>左侧直行;直行>对向左转;右侧左转>直行;对向右转>左转;右侧左转>左转;左转与对向左转在不改变初始意图的条件下具有同等通行权.
5) 车辆碰撞避险安全速度建议
处于避险规则中低优先级的车辆为LowVeh,高优先级的车辆为HighVeh.令t为LowVeh调整速度前到达冲突点的时间,根据LowVeh在冲突点的冲突情形可以确定延迟时间Δt,使LowVeh在t+Δt时刻到达冲突点,避免冲突. Δt为
|
(4) |
其中:LHighVeh为HighVeh车长度占用网格总长度,WLowVeh为LowVeh车宽占用网格宽度,vHighVeh为LowVeh车速度.
令LowVeh在t+Δt时刻到达冲突点能恰好避开碰撞. LowVeh在调整速度后,在t+Δt时刻到达冲突点,即与调整速度前到达相同的位置.根据速度调整前后车辆到达相同的位置坐标,横纵坐标相同可以列出
|
(5) |
其中:tanφ(t)为t时刻LowVeh前轮转动的转向角,v为LowVeh的速度,v′为LowVeh的建议速度,L为LowVeh的长度,t0为开始进入预警区域的初始时刻,t为LowVeh到达冲突点的时刻,t+Δt为调节速度后到达冲突点的时间. LowVeh原先在t时刻到达冲突点,调节速度后在t+Δt时刻到达冲突点,两次到达同一点,坐标相同.式(5) 中上式为横坐标相同,下式为纵坐标相同.
解式(5) 中方程可得
|
(6) |
即LowVeh调整后的速度.
2 系统实验与分析本系统实验分为两部分:① 采用德克萨斯大学奥斯丁分校开发的智能路口仿真器AIM作为仿真工具[7],验证系统的可行性;② 在真实交叉路口中对算法进行验证.
2.1 仿真验证仿真实验利用了AIM仿真器基于时空网格同步模型的冲突检测机制,并对该仿真器有关冲突检测算法的核心代码进行修改,实现了对人类驾驶车辆通过路口时的安全预警,并通过计算冲突时间和避险时间获得车辆潜在的碰撞程度,最终为驾驶员提供安全合理的车辆速度建议,如图 4所示.

|
图 4 系统实验 |
1) 实验参数设置
实验场景:无信号双向六车道交叉路口;无信号双向四车道交叉路口;有信号双向六车道交叉路口.交叉路口信息:交叉路口单车道宽为2.2 m;双向四车道网格划分粒度为9×9,双向六车道网格划分为15×15.车辆规模:每个场景分5组数据,交通流密度每小时500~900车辆数/车道;车辆数随机生成.车辆物理参数:车辆尺寸(长度:3.6~4.6 m,宽度:1.5~1.8 m);车速随机生成.
2) 实验仿真结果
① 无信号双向六车道交叉路口预警场景,在没有基于交叉路口道路时空网格的车辆碰撞预警算法时,冲突情况如图 5所示.根据车流量密度不同,设计10组数据,实验时间为600 s,其中GPS正常为5组,出现GPS跳帧为5组(每200 s随机抽出5辆车,出现GPS跳帧1次),并分别统计这段时间内10组交通流密度中交叉路口通行的车流量.

|
图 5 交叉路口冲突数 |
采用基于交叉路口道路时空网格的车辆碰撞预警算法在GPS正常和跳帧情况下,均能准确检测出车辆潜在碰撞情况,对驾驶员进行预警提示,保证交叉路口安全通畅,如表 1所示.
|
|
表 1 无信号双向六车道交叉路口碰撞检测表 |
② 无信号双向四车道交叉路口预警场景,冲突数如图 5所示.
表 2中,根据车流量密度不同,同样设计了10组数据,实验时间为600 s,其中GPS正常为5组,出现GPS跳帧为5组(每200 s随机抽出5辆车,出现GPS跳帧一次),并分别统计这段时间内10组交通流密度中交叉路口通行的车流量.
|
|
表 2 无信号双向四车道交叉路口碰撞检测表 |
采用基于交叉路口道路时空网格的车辆碰撞预警算法在无信号四车道交叉路口中,能对交叉路口中的冲突情况进行准确预测并给予速度建议.
③ 有信号双向六车道交叉路口预警场景,由于信号控制的作用,车辆碰撞冲突点个数要少于无信号场景中冲突点个数. 图 5所示有信号交叉路口中,在没有运行基于交叉路口道路时空网格的车辆碰撞预警算法时,存在冲突情况.
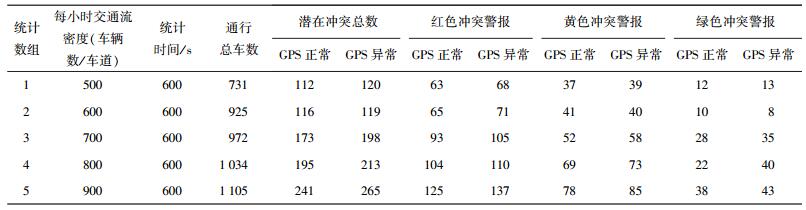
表 3中,根据车流量密度不同,设计了5组数据,实验时间为600 s,并分别统计这段时间内5组车辆车流量密度中交叉路口通行的车流量,通过统计实验结果表明,在有信号交叉路口中采用基于交叉路口道路时空网格的车辆碰撞预警算法,能完全检测出车辆潜在碰撞情况,并给予驾驶员速度建议.
|
|
表 3 有信号双向六车道交叉路口碰撞检测表 |
3) 实验仿真结论
实验证明了基于交叉路口道路时空网格的车辆碰撞预警算法的准确性,在无信号交叉路口和有信号交叉路口均能准确预测车辆的冲突,并能按照冲突程度进行分类,给予不同的速度建议.在仿真场景下,车辆之间通信丢失、机械故障和危险驾驶等忽略不计.理论上,基于交叉路口道路时空网格的车辆碰撞预警算法同时适用于有信号的情况和无信号的情况,然而算法在真实环境下是否可用仍需检验.
2.2 真实交叉路口验证为了对基于交叉路口道路时空网格的车辆碰撞预警算法在真实环境中性能进行验证,在真实交叉路口完成现场测试,如图 4所示.
1) 测试设备:测试车辆2辆,路侧单元1台,均配备高精度差分GPS和DSRC通信设备.
2) 实验中交叉路口情况:无信号交叉路口东西宽为16.5 m,南北宽为7.5 m;东西双向四车道(每条车道宽为3.75 m),中间为1.5 m宽绿化带;南北为双向二车道(每条车道宽为3.75 m);路侧终端放置于交叉路口的西南处;由北向南车道为上坡车道,坡度约15°,坡度渐缓路段至路口停车线的距离为9 m,交叉路口划分为30×40个网格.
3) 实验场景:图 6(a)南北直行与东西直行碰撞预警;图 6(b)车辆追尾预警;图 6(c)左转与直行碰撞预警;图 6(d)右转与直行碰撞预警.以上4种场景均进行10轮测试.

|
图 6 预警场景 |
4) 实验结果:在4种场景的分别10轮测试中,直行预警和右转与直行预警成功率为100%(直行预警场景中红色预警2次,黄色预警4次,绿色预警4次;右转与直行预警场景中红色预警3次,黄色预警3次,绿色预警4次);追尾预警和右转与直行预警由于通信不畅预警成功率为90%(成功的追尾预警场景中红色预警2次,黄色预警3次,绿色预警4次;右转与直行预警场景中红色预警3次,黄色预警3次,绿色预警3次).成功预警场景中均给出合理避险速度建议.
5) 实验结论:通过现场测试表明,首先,4种实验场景的潜在碰撞危险,预警算法均可以快速高效识别,给予驾驶员预警,保证交叉路口中的行车安全;其次,在真实交叉路口场景下,由于通信因素的干扰,导致路侧单元或车辆没有及时接收到数据,然而,即使在这样情况下,预警算法仍能保证大部分预警能成功触发,取得了很好的实验结果;最后,通信性能对预警至关重要,这也是下一步研究方向.
3 结束语基于交叉路口道路时空网格车辆避碰算法能有效检测出潜在车辆碰撞危险,对即将进入交叉路口区域的车辆进行预警提醒,协助驾驶员对行驶路线进行预判,从而降低事故发生率,在提升交叉路口行车安全性的同时提高了交叉路口通行能力.然而,车联网环境下实现车辆避碰预警是一项复杂的工作,因此下一步工作从以下2个方面继续开展更细致的研究:① 预警系统中加入车辆跟驰模型和交通流模型等,提高车辆避险精确度;② 通信质量对预警系统性能的影响.
| [1] | 俄文娟. 无信号交叉口车车冲突检测与消解算法研究[D]. 长春: 吉林大学, 2012. |
| [2] | Steve Sill, Blake Christie, Ann Diephaus, et al. Research and Innovative Technology Administration. Intelligent transportation systems(ITS)strategic plan background and process[EB/OL], US department of transportation, 2011[2014-03-28]. http://www.slideserve. com/larya/intelligent-transportation-systems-itsstrategic-plan-background-and-process. |
| [3] | Sengupta R, Rezaei S, Shladover S E, et al. Cooperative collision warning systems: concept definition and experimental implementation[J].Journal of Intelligent Transportation Systems, 2007, 11(3): 143–155. doi: 10.1080/15472450701410452 |
| [4] | Tan Hanshue, Huang Jihua. DGPS-based vehicle-to-vehicle cooperative collision warning: engineering feasibility viewpoints[J].Intelligent Transportation Systems, IEEE Transactions on, 2006, 7(4): 415–428. doi: 10.1109/TITS.2006.883938 |
| [5] | Huang C M, Lin S Y, Yang C C, et al. A collision pre-warning algorithm based on V2V communication[C]//Ubiquitous Information Technologies and Applications, ICUT'09, Proceedings of the 4th International Conference on. [s. l. ]: IEEE, 2009: 1-6. |
| [6] | Huang Chungming, Lin Shihyang. An advanced vehicle collision warning algorithm over the DSRC communication environment: an advanced vehicle collision warning algorithm[C]//Advanced Information Networking and Applications (AINA), 2013 IEEE 27th International Conference on. [s. l. ]: IEEE, 2013: 696-702. |
| [7] | Dresner K M, Stone P. A multiagent approach to autonomous intersection management[J].J Artif Intell Res(JAIR), 2008, 31: 591–656. |
| [8] | Dresner K, Stone P. Multiagent traffic management: a reservation-based intersection control mechanism[C]//Proceedings of the Third International Joint Conference on Autonomous Agents and Multiagent Systems-Volume on.[s. l. ]: IEEE Computer Society, 2004: 530-537. |