 2016, Vol. 33
2016, Vol. 33文章信息
- 王超, 周波, 张志, 杨春升, 陈方, 刘朝阳
- WANG Chao, ZHOU Bo, ZHANG Zhi, YANG Chun-sheng, CHEN Fang, LIU Chao-yang
- 超短回波时间成像k空间轨迹失真的校正
- Correction of k-Space Trajectory Errors in Ultra-Short TE Imaging
- 波谱学杂志, 2016, 33(4): 597-608
- Chinese Journal of Magnetic Resonance, 2016, 33(4): 597-608
- http://dx.doi.org/10.11938/cjmr20160409
-
文章历史
收稿日期: 2016-04-26
收修改稿日期: 2016-10-25




DOI:10.11938/cjmr20160409


2. 中国科学院大学, 北京 100049
2. University of the Chinese Academy of Sciences, Beijing 100049, China
传统的磁共振成像(magnetic resonance imaging,MRI)作为一种无辐射、非侵入的成像手段,可以提供信息含量丰富的软组织对比度图像[1-3],已成为临床医学中一种常规的影像诊断技术.然而,对于超快速弛豫组织如软骨、骨骼、肺、钙化病灶等,因其横向弛豫时间(T2)极短,传统MRI方法却无能为力[4-6].这是由于传统MRI脉冲序列的回波时间(echo-time,TE)远大于超快速弛豫组织的T2,在信号采样时,快速弛豫组织的核磁共振(nuclear magnetic resonance,NMR)信号已衰减至难以检测.
对于超快速弛豫组织的成像,需要采用有别于常规MRI方法的超短回波时间脉冲序列.目前,比较流行的超短回波时间脉冲序列包括单点成像(single point imaging,SPI)、ZTE(zero echo-time imaging)、SWIFT(sweep imaging with Fourier transformation)和超短回波时间(ultra-short echo-time,UTE)成像等等.其中,SPI在一次扫描中仅采集三维k空间中的一个点,需要漫长的扫描时间,即使利用其加速形式——SPRITE(single-point ramped imaging with T1 enhancement),扫描时间在临床应用中依然不可容忍.ZTE是一种三维射线采样序列,其在编码梯度稳定后施加射频脉冲并立即进行采样,由于ZTE采用短而强的射频脉冲,使其比吸收率(specific absorption rate,SAR)很高,不利于临床应用.SWIFT引入绝热脉冲进行激发,可以降低比吸收率,但需要在脉冲激发期间采样,对射频线圈和接收系统的要求很高.相比于以上脉冲序列,UTE是一种潜在的可能应用于临床的超短回波时间脉冲序列,其具有成像速度较快、成像比吸收率值较低、对硬件系统要求较低等优点.
但是,与成熟的常规MRI方法相比,目前UTE成像方法的实际应用还存在一定的困难.原因在于UTE序列从梯度边沿开始沿射线轨迹采集自由感应衰减(free induction decay, FID)信号填充k空间,对梯度涡流和梯度延时等因素引起的k空间轨迹失真极度敏感,若不在采样或者重建时进行校正,将产生严重的图像伪影,包括模糊、阴影和几何变形等.采样时的校正是指在脉冲序列中调整采样门控信号的位置,使其时序能够与梯度精确对准,这种方法能在很大程度上降低k空间轨迹失真的影响,但不能校正涡流的影响;且当梯度通道之间存在延时不均衡时,也难以完全消除梯度延时的影响.重建时的校正是指用真实k空间轨迹而非理想k空间轨迹进行图像重建,较常用的方法是先测量k空间轨迹[12],再以此重建图像.这种方法一般可以取得很好的效果,但非常耗时.另一种方法是测量梯度系统的频率响应函数[13],再据此估计真实k空间轨迹,这种方法可以显著提高k空间轨迹校正的时效性,但梯度系统的频率响应函数测量过程十分复杂.考虑到大多数情形下,梯度涡流和梯度延时是引起轨迹失真的主要因素,Atkinson等人[14]提出了一种简便的真实k空间轨迹估计方法:在空间中多个位置,测量多个梯度下的一组k空间轨迹曲线,并建立在梯度涡流和梯度延时影响下的k空间轨迹曲线数学模型,通过最小化理论k空间曲线与测量值的误差,求取系统的梯度涡流常数和梯度延时,再用这些参数来校正k空间轨迹.这种方法便于实现且时效性高.但实际应用时,梯度延时与时间常数很小的涡流表现极其相似[15, 19],二者很难区分,这种方法缺少对涡流常数取值的限制,难以保证总是获得最优的一组解.
针对以上问题,本文在Atkinson等人提出的轨迹估计方法的基础上,针对以梯度涡流和梯度延时为主要因素引起的k空间轨迹失真,提出了一种改进的UTE序列轨迹校正方法:首先测量MRI系统的残余涡流曲线和UTE序列k空间轨迹,将最小化k空间轨迹误差和涡流曲线误差作为两个目标函数;然后求解这一约束多目标优化问题,避免涡流和延时影响的混淆,最终确定梯度延时和涡流常数;再以这组系统参数校正k空间的轨迹.
1 理论与方法 1.1 k空间轨迹失真的来源 1.1.1 梯度涡流由电磁感应定律可知,在梯度切换时,磁体空间内的导体结构中将产生感应电流,导致实际梯度场与理想梯度场产生偏差.MRI中通常称这些感应电流为梯度涡流[17, 18].一般来说,MRI梯度涡流的阶跃电流响应可写为如下的多指数衰减形式:
|
(1) |
其中t代表时间;p代表梯度场的空间分布形式,包括X、Y、Z三种;q代表涡流的空间分布形式,如B0、X、Y、Z等;
|
(2) |
梯度延时(gradient delay),指实际梯度相对于理论梯度在时序上的延迟[16],其作用可以表示为:
|
(3) |
其中,与分别代表理想梯度波形与延时的梯度波形,D为梯度延时.
梯度延时主要来源于梯度放大器与线圈的响应时间延时[16].在一定温度下,梯度延时可以被视为一个常数;而温度变化时,则可能会发生变化.由于梯度延时的存在,脉冲序列中的梯度事件总是相对于射频脉冲和采样略有滞后.在笛卡尔采样体系下,梯度延时在层选方向上造成层面回聚不完全,使得k空间数据在层面梯度方向上出现偏移;在编码梯度方向上,梯度延时引起回波中心的偏移,在图像域上主要表现为线性相位.因此,在一般的自旋回波成像和梯度回波成像上,梯度延时并不会造成伪影,其影响可以忽略不计.在射线采样模式的UTE方法中(如图 1所示),梯度延时在层面上的影响与笛卡尔采样相同,在编码梯度方向上,梯度延时将导致采样最初的若干点停留在k空间原点.射线轨迹滞后,如不加以校正,将引起网格化重建时的网格化错误.另外,和常规序列相比,UTE序列针对超快弛豫的组织成像,通常需要更高的采样率和更小的采样时间间隔,从而更加剧了梯度延时引起的k空间轨迹失真.

|
| 图 1 UTE成像中梯度延时的影响 Fig. 1 Effects of gradient delay in UTE pulse sequence |
涡流测量的脉冲序列如图 2所示[20]:在梯度脉冲后,间隔一个可变延时△,用硬脉冲激发样品,采集FID信号并用△t时间内的相位演化来表征涡流.逐次改变延时△,重复测量,得到涡流随时间的衰减曲线,然后用多指数拟合算法即可大致确定涡流的时间常数和幅度常数.

|
| 图 2 用于测量梯度涡流的脉冲序列 Fig. 2 Pulse sequence for eddy currents measurement |
在实验中,梯度脉冲的时间应足够长,以保证梯度前沿引起的涡流衰减完全.理论上,为测量涡流的冲激响应,测试梯度应为一矩形梯度,实际中零边沿时间无法实现.但一般而言,边沿时间对测量结果的影响很小[18],在测量中使其尽可能短即可.涡流测试样品一般选择一个球形对称的均匀样品,T1与T2均适中,以保证信号具有足够的信噪比并能及时恢复到平衡态.
涡流测量的基本原理如下,以Z梯度为例,将对称样品在Z轴上放置,在共振条件下,FID信号的相位为:

|
(4) |
其中t代表时间;τ是积分变量;
对于零阶涡流,将对称均匀样品置于磁场中心,(4) 式右边第二项消去,为消除无关相位

|
(5) |
则由零阶涡流引起的信号相位为:
|
(6) |
零阶涡流可近似为:

|
(7) |
对于一阶涡流,将样品偏离中心放置,FID信号相位包含了零阶涡流、一阶涡流和

|
(8) |
k空间轨迹的测量使用如图 3所示的脉冲序列[14].以Z梯度为例:首先,Z方向上的层选梯度与选择性脉冲激发一个偏中心的薄切片;然后开启测试梯度并同时采集FID信号,如图 3(a)所示.为消除层选梯度和场不均匀性等其他因素对信号相位的影响,在关闭测试梯度的条件下采集一个相位参考信号,如图 3(b)所示.理论上,两个信号的相位差为:

|
(9) |
其中z为层面偏中心的距离;

|
(10) |
|
(11) |
ne和n0分别代表一阶涡流和零阶涡流的项数;aei 、

|
| 图 3 用于k空间轨迹测量的脉冲序列 Fig. 3 Pulse sequence for k-space trajectory measurement |
在1.2.1节,通过NMR实验测量了涡流曲线,并得到了涡流常数的大致数值.而1.2.2节则说明了测量k空间轨迹的方法,并给出了轨迹曲线的数学模型.MRI系统的真实梯度延时和涡流常数应满足以下两个条件:
(1)按照(10) 式估计的k空间应逼近测量的k空间;
(2)按照(1) 式计算的涡流响应曲线应逼近测量的涡流曲线.
因此,梯度延时与涡流常数的求解可以表示为如下约束多目标优化问题:
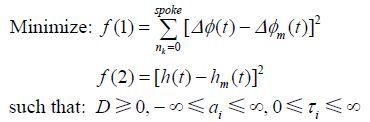
|
(12) |
其中spoke为射线条数,对nk的求和表示对UTE序列整个k空间轨迹的综合考虑;
脉冲序列及相关实验在Bruker 4.7 T小动物超导MRI系统上实现.梯度涡流、梯度延时测量的样品为CuSO4水溶液(浓度为1.96 g/L),T1约为110.2 ms,T2约为74.8 ms.
样品保存在一个直径为40 mm的塑料球体中,并用一维梯度实验进行样品定位.结构水模样品(CuSO4·2H2O,浓度为1 g/L;Agar,浓度为10 g/L)的T1约为245.6 ms,T2约为51.8 ms.超短T2时间样品为4种不同浓度的MnCl2溶液,保存在5 mL比色瓶中、各支编号、浓度及T2见表 1所示.
| No. | / (mg/mL) | T2 / ms |
| 1 | 0.078 | 17.92 |
| 2 | 0.789 | 1.55 |
| 3 | 1.970 | 0.55 |
| 4 | 2.363 | 0.53 |
梯度涡流的测量结果如图 4所示.图 4(a)~(c)分别为X/Y/Z梯度的一阶涡流,其中Y梯度的一阶涡流包含两个主要的指数项,X/Z梯度的一阶涡流仅包含一个主要的指数项;图 4(d)为Z梯度的零阶涡流.X/Y梯度的零阶涡流非常小,此处予以忽略.涡流测量的参数如下:梯度时间为10 ms,梯度强度为80 mT/m,可变延时D以5 ms为间隔均匀分布在0~1 ms之间,编码时间Dt为2 ms,硬脉冲脉宽为20 ms.
3.2 k空间轨迹曲线测量k空间轨迹曲线的测量结果如图 5所示,这里以X、Y作读梯度为例(Z梯度的测量与之类似).其中k空间频率已归一化到-0.5~0.5之间.为了清晰显示,图 5仅画出了其中1/10的射线轨迹数据.测量参数如下:采样频率为200 kHz,视野(FOV)为80 mm×80 mm,采样矩阵为256×256,层厚为0.5 mm,层偏为10 mm.
3.3 梯度延时与涡流优化参数根据测量得到的涡流曲线和k空间轨迹,用(12) 式优化计算出各通道梯度延时及其涡流的幅度常数,其结果见表 2.
| 梯度 | 涡流项 | 幅度常数/% | 时间常数/ms | 梯度延时/ms |
| X | X | 15.53 | 74.58 | 52.72 |
| Y | Y | 40.86 | 34.17 | 41.56 |
| Y | 5.63 | 206.90 | ||
| Z | Z | 43.76 | 24.47 | 58.85 |
| B0 | -2.87E-3 | 20.39|||
| *零阶涡流幅度常数单位为T/(T/m) | ||||

|
| 图 4 梯度涡流测量结果:(a) X梯度一阶涡流响应;(b) Y梯度一阶涡流响应;(c) Z梯度一阶涡流响应;(d) Z梯度零阶涡流响应 Fig. 4 Results of eddy currents measurement: (a) X linear eddy; (b) Y linear eddy; (c) Z linear eddy;(d) Z B0 eddy |

|
| 图 5 k空间轨迹测量结果 Fig. 5 Result of k-space trajectory measurement |
确定了梯度系统的涡流与延时之后,按照(5) 式和(6) 式即可估计真实的k空间轨迹,而无需在每次实验前都重新测量轨迹.用这种方法估计k空间的一个例子如图 6所示.图 6(a)为校正前的k空间轨迹图,图 6(b)为校正前k空间轨迹与测量k空间之间的误差图,图 6(c)为按照表 2中的涡流和延时估计的k空间轨迹图,图 6(d)为估计的k空间轨迹图与测量k空间图之间的误差图.可以看出,经过轨迹校正后,k空间轨迹的误差明显减小.

|
| 图 6 k空间轨迹校正结果:(a) 校正前的k空间轨迹;(b) 轨迹校正前的k空间误差图;(c) 校正后的k空间轨迹;(d) 轨迹校正后的k空间误差图 Fig. 6 Results of k-space trajectory correction: (a) k-space trajectory before correction; (b) k-space trajectory errors before correction; (c) k-space trajectory after correction; (d) k-space trajectory errors after correction |
用此方法进行k空间轨迹校正的实际应用的结果如图 7、8所示.UTE图像的重建使用双倍网格化算法,卷积核为Kaiser-Bessel窗(常数b取6.486 1),窗宽为3,点数为64.图 7(a)~(c)分别为水模的常规自旋回波(spin echo,SE)图像以及利用轨迹校正前后的UTE图像.SE的TE为14 ms,UTE序列的TE为0.475 ms.其余主要参数二者相同:采样频率为50 kHz,FOV为80 mm×80 mm,采样矩阵为256×256,层厚为2 mm.可以看到,k空间轨迹校正前,图像存在明显伪影,而校正后的图像质量则大幅改善,细节已经非常接近SE图像.图 8为超短T2样品的UTE和常规梯度回波(gradient refocused echo,GRE)图像.UTE序列的TE为0.475 ms,采样频率为120 kHz;GRE的TE为6 ms,采样频率为50 kHz.其余的主要参数二者相同:FOV为80 mm×80 mm,采样矩阵为256×256,层厚为2 mm.在图 8(b)的GRE图像中,T2较长的1号样品清晰可见,2号样品信号的衰减已经十分明显,3、4号样品则完全不可见;校正前的图 8(c)已被伪影所湮没,而在校正后的图 8(d)中则可以清晰地观察到所有样品管的图像.

|
| 图 7 结构水模的图像:(a) SE图像;(b) 轨迹校正前的UTE图像;(c) 轨迹校正后的UTE图像 Fig. 7 Images of structured phantom: (a) SE image; (b) UTE image before trajectory correction; (c) UTE image after trajectory correction |

|
| 图 8 超短T2样品的图像:(a) 样品排列顺序图;(b) GRE图像;(c) 轨迹校正前的UTE图像; (d) 轨迹校正后的UTE图像 Fig. 8 Images of ultra-short T2 samples: (a) Arrange diagrammatic sketch of samples; (b) GRE image; (c) UTE image before trajectory correction; (d) UTE image after trajectory correction |
以上实验表明,这种k空间轨迹估计的方法可以明显地减轻UTE成像中轨迹失真带来的伪影问题.经过轨迹校正后的UTE图像,可以很好地呈现快速弛豫组织图像,并能够几乎完整地恢复图像细节.这种轨迹校正方法不需要在每次实验前额外地测量k空间轨迹,可以成倍地降低UTE采样和重建的时间.
4 结论本文提出了一种改进的k空间轨迹校正方法:以最小化k空间轨迹误差和涡流曲线误差作为目标函数,求解多目标优化问题,从而确定MRI系统的梯度延时和残余涡流的幅度常数、时间常数,再以之对k空间轨迹进行校正.该方法便于实现且时效性高,能有效减轻UTE成像中轨迹失真引起的图像伪影.
| [1] | Yang X . Contrast in NMR imaging and microscopy[J]. Concept Magn Reson , 1996, 8 (3) : 205-225 DOI:10.1002/(ISSN)1099-0534 |
| [2] | Poels E M, Kegeles L S, Kantrowitz J T et al . Glutamatergic abnormalities in schizophrenia:A review of proton MRS findings[J]. Schizophr Res , 2014, 152 (1, 2) : 325-332 |
| [3] | Lynch K, O'brien R . 1H magnetic resonance spectroscopy:A review of the current literature and its potential utility in veterinary oncology[J]. Vet J , 2014, 200 (2) : 240-247 DOI:10.1016/j.tvjl.2014.02.009 |
| [4] | Bae W C, Chang E Y, Chung C B . Short and ultrashort TE imaging of cartilage and fibrocartilage[J]. eMagRes , 2012, 1 (4) : 823-836 |
| [5] | Boulougouri K, Messiou C, Desouza N M . Ultrashort TE in cancer imaging[J]. eMagRes , 2012, 1 (1) : 97-102 |
| [6] | Madelin G, Lee J S, Regatte R R et al . Sodium MRI:Methods and applications[J]. Prog Nucl Magn Reson Spectrosc , 2014, 79 : 4-47 |
| [7] | Ian Y . Overview of short and ultrashort T2/T2* echo time (UTE) imaging[J]. eMagRes , 2012, 1 (4) : 747-756 |
| [8] | Michael G . MRI of fast-relaxing spins[J]. J Magn Reson , 2013, 229 : 49-54 DOI:10.1016/j.jmr.2013.01.011 |
| [9] | Margosian P M, Takahashi T, Takizawa M . Practical implementation of UTE imaging[J]. eMagRes , 2012, 1 (2) : 297-310 |
| [10] | Fabich H T, Benning M, Sederman A J et al . Ultrashort echo time (UTE) imaging using gradient pre-equalization and compressed sensing[J]. J Magn Reson , 2014, 245 : 116-124 DOI:10.1016/j.jmr.2014.06.015 |
| [11] | Tyler D J, Robson M D, Henkelman R M et al . Magnetic resonance imaging with ultrashort TE (UTE) pulse sequences:technical considerations[J]. J Magn Reson Imaging , 2007, 25 (2) : 279-289 DOI:10.1002/(ISSN)1522-2586 |
| [12] | Duyn J H, Yang Y, Frank J A et al . Simple correction method for k-space trajectory deviations in MRI[J]. J Magn Reson , 1998, 132 : 150-153 DOI:10.1006/jmre.1998.1396 |
| [13] | Addy N O, Wu H H, Nishimura D G . Simple method for MR gradient system characterization and k-space trajectory estimation[J]. Magn Reson Med , 2012, 68 (1) : 120-129 DOI:10.1002/mrm.23217 |
| [14] | Atkinson I C, Lu A K, Thulborn K . Characterization and correction of system delays and eddy currents for MR imaging with ultrashort echo-time and time-varying gradients[J]. Magn Reson Med , 2009, 62 (2) : 532-537 DOI:10.1002/mrm.v62:2 |
| [15] | Aldefeld b, Bornert P . Effects of gradient anisotropy in MRI[J]. Magn Reson Med , 1998, 39 (4) : 606-614 DOI:10.1002/(ISSN)1522-2594 |
| [16] | Brodsky E K, Samsonov A A, Block W F . Characterizing and correcting gradient errors in non-cartesian imaging:Are gradient errors linear time-invariant (LTI)?[J]. Magn Reson Med , 2009, 62 (6) : 1466-1476 DOI:10.1002/mrm.v62:6 |
| [17] | Jehenson P, Westphal M, Schuff N . Analytical method for the compensation of eddy-current effects induced by pulsed magnetic field gradients in NMR systems[J]. J Magn Reson , 1990, 90 (2) : 264-278 |
| [18] | Vaals J J V, Bergman A H . Optimization of eddy-current compensation[J]. J Magn Reson , 1990, 90 (1) : 52-70 |
| [19] | Bernstein M A, King K F, Zhou X J . Handbook of MRI Pulse Sequences[M]. London: Elsevier Academic Press, 2004 . |
| [20] | Han H, Ouriadov A V, Fordham E et al . Direct measurement of magnetic field gradient waveforms[J]. Concept Magn Reson A , 2010, 36 (6) : 349-360 |

本作品采用知识共享署名 4.0 国际许可协议进行许可。