 2016, Vol. 33
2016, Vol. 33 



2. 中国科学院大学, 北京 100049
2. University of Chinese Academy of Sciences, Beijing 100049, China
合成孔径激光雷达(SAL)结合合成孔径技术和激光波长短的特点,在超高分辨率观测领域发展前景广阔[1],但也存在数据量巨大的问题.文献[2]给出机载SAL系统参数:快时间采样率4 GHz,重复频率大于80 kHz.如此高的二维采样率导致的大数据量,给回波存储和成像处理都带来了困难.
由于激光波束窄,SAL成像场景幅宽小,使用LFM信号时,去斜接收可降低AD采样率和成像数据量[3].模拟去斜需要复杂的延时控制电路,且采样率受延时误差影响,为简化系统并进一步降低采样率,本文将低采样率数字去斜技术[4]应用于SAL.
1 采样率分析为降低峰值功率,机载SAL通常采用线性调频连续波(LFMCW)体制,这为使用数字去斜提供了条件,依据文献[2],本文确定的机载SAL系统参数如表 1所示.为避免方位多普勒模糊,本文采用100 kHz的高重频,对应10 μs的扫频周期;由于激光距离向波束较窄,场景幅宽远小于扫频周期对应的宽度,在3 km范围,存在的距离模糊可自动去除.
|
|
表 1 机载SAL系统参数 Table 1 System parameters of airborne SAL |
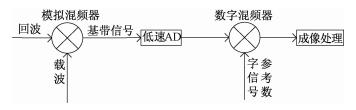
图 1给出低采样率数字去斜的原理框图.文献[4]从原理上证明并仿真验证了,若采样率大于模拟去斜时场景幅宽对应的谱宽,使用低采样率数字去斜技术,可获得全分辨率的脉压结果.

|
Download:
|
|
图 1 低采样率数字去斜原理框图 Fig. 1 Diagram of digital dechirp with low sampling rate |
|
{kind=link}
模拟去斜时,采样率的选择应综合考虑场景幅宽、延时误差和信号非线性失真的影响,采样率应满足
| ${{f}_{s}}\ge \gamma \left( \frac{2\Delta {{R}_{w}}}{C}+\frac{2\Delta {{R}_{\varepsilon }}}{C} \right)+\Delta {{f}_{s}},$ | (1) |
其中,fs为快时间采样率,γ为发射LFM信号的调频率,ΔRw为场景幅宽,ΔRε为最大延时误差(本文中延时用斜距表示),Δfs为因信号非线性失真增加的采样率,一般比较小.
低采样率数字去斜时,由于去斜操作由后续信号处理实现,生成回波矩阵前,可由回波数据估计延时范围,所以采样率的选择只需要考虑场景幅宽和信号非线性的影响,采样率应满足
| ${{f}_{s}}\ge \gamma \frac{2\Delta {{R}_{w}}}{C}+\Delta {{f}_{s}}.$ | (2) |
由表 1给出的系统参数,ΔRε=150 m,ΔRw=15 m,若模拟去斜,采样率应大于440 MHz;若低采样率数字去斜,采样率大于40 MHz即可.考虑到延时估计误差以及信号非线性的影响,本文将快时间采样率设置为100 MHz.显然,将低采样率数字去斜应用于SAL可进一步降低系统采样率.
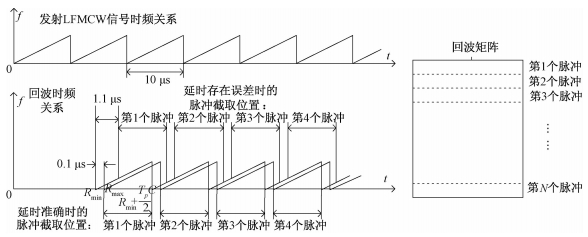
2 延时估计和回波矩阵形成LFMCW体制下,信号的收发连续进行,需要对连续的回波信号进行裁剪,获得等效的脉冲信号,然后形成二维回波矩阵以进行后续的成像处理.信号裁剪的时序关系如图 2所示,假设场景最小延时为Rmin,最大延时为Rmax,回波矩阵中每个脉冲的起止时间应为单个扫频周期信号发射后

|
Download:
|
|
图 2 信号时频关系和回波矩阵示意图 Fig. 2 Schematic diagram of signal time-frequency relationship and echo matrix |
|
{kind=link}
回波信号的延时范围可由载机和场景的GPS位置信息换算得到,其误差通常较小,但是由于飞机高度和横滚角变化,机载SAL获取数据时,回波延时最大可能存在150 m左右的误差,对应1 μs的时序错位.SAL重复频率高,扫频周期较短,延时误差会造成较大的能量损失.如图 2所示,由表 1给出的系统参数,若延时精确已知,能量损失仅来自场景幅宽,为0.1 μs/10 μs=1%;若存在150 m的延时误差,能量损失增大为1.1 μs/10 μs=11%.
为降低能量损失,在形成回波矩阵前,需取同一扫频周期信号的回波去斜脉压以进行延时估计.设由GPS数据换算得到的延时为[R, R+ΔRw],最大延时误差为ΔRε,考虑极限情况:若延时提前ΔRε,那么延时区间[R+ΔRε+ΔRw, R+ΔRε+
实际工程中,SAL发射的LFM信号线性度往往较差[2],本文使用基于RVP滤波的方法进行信号校正[5-6].
设点目标到雷达的距离为Ri,该目标反射的回波为
| $\begin{align} & {{s}_{r}}\left( t \right)=\text{rect}\left( \frac{t-2{{R}_{i}}/C}{{{T}_{p}}} \right)\cdot {{\text{e}}^{\text{j}2\text{ }\!\!\pi\!\!\text{ }\left\{ {{f}_{c}}\left( t-2{{R}_{i}}/C \right)+\frac{1}{2}\gamma {{\left( t-2{{R}_{i}}/C \right)}^{2}} \right\}}}\cdot \\ & {{\text{e}}^{\text{j}2\text{ }\!\!\pi\!\!\text{ }\!\!\varepsilon\!\!\text{ }\left( t-2{{R}_{i}}/C \right)}}, \\ \end{align}$ | (3) |
其中,t为快时间,Tp为扫频周期,C为光速,fc为载频,γ为快时间调频率,ej2πε(t)为发射信号的非线性失真项,通常可通过信号内定标获得[7-9],其中,
以Rref为参考斜距对该回波去斜,设RΔ=Ri-Rref,去斜后的差频输出为
| $\begin{align} & {{s}_{if}}\left( t \right)={{s}_{r}}\left( t \right)\cdot s_{\text{ref}}^{*}\left( t \right) \\ & =\text{rect}\left( \frac{t-2{{R}_{i}}/C}{{{T}_{p}}} \right)\cdot {{\text{e}}^{-\text{j}\frac{4\text{ }\!\!\pi\!\!\text{ }}{C}\gamma \left( t-\frac{2{{R}_{\text{ref}}}}{C} \right)R\Delta }}\cdot \\ & {{\text{e}}^{-\text{j}\frac{4\text{ }\!\!\pi\!\!\text{ }}{C}{{f}_{c}}R\Delta }}\cdot {{\text{e}}^{\text{j}\frac{4\text{ }\!\!\pi\!\!\text{ }}{{{C}^{2}}}R_{\Delta }^{2}}}\cdot {{\text{e}}^{j2\text{ }\!\!\pi\!\!\text{ }\varepsilon \left( t-2{{R}_{i}}/C \right)}}. \\ \end{align}$ | (4) |
将该差频信号沿快时间傅里叶变换(以参考点的时间为基准)
| $\begin{align} & {{S}_{if}}\left( f \right)=\left\{ {{T}_{p}}\sin c\left[ {{T}_{p}}\left( f+2\frac{\gamma }{C}R\Delta \right) \right]\cdot \right. \\ & \left. {{\text{e}}^{-\text{j}\left( \frac{4\text{ }\!\!\pi\!\!\text{ }fc}{C}R\Delta +\frac{4\text{ }\!\!\pi\!\!\text{ }\gamma }{{{C}^{2}}}R_{\Delta }^{2}+\frac{4\text{ }\!\!\pi\!\!\text{ }f}{C}R\Delta \right)}} \right\}\otimes FT\left\{ {{\text{e}}^{\text{j2 }\!\!\pi\!\!\text{ }\varepsilon \left( t-\frac{2R\Delta }{C} \right)}} \right\}, \\ \end{align}$ | (5) |
上式卷积号前的相位项中,第2项是RVP项,第3项是包络斜置项,均应予以去除[10].这2项都与RΔ有关,对不同的RΔ应作出不同的相位补偿.但是从公式看,差频信号变到频域后成为宽度很窄的sinc函数,也就是说,对斜距RΔ的目标进行补偿时,只需要补偿
| $\begin{align} & {{S}_{if}}\left( f \right)={{T}_{p}}\cdot {{\varphi }_{\varepsilon }}\left( f+2\frac{\gamma }{C}R\Delta \right)\cdot \\ & {{\text{e}}^{\text{j}\frac{\text{ }\!\!\pi\!\!\text{ }}{\gamma }{{f}^{2}}}}\cdot {{\text{e}}^{\text{-j}\frac{\text{4 }\!\!\pi\!\!\text{ }{{f}_{c}}}{C}R\Delta }}, \\ \end{align}$ | (6) |
其中,φε(f)=FT{ej2πε(t)},对式(6)乘以Sc(f)=
| ${{S}_{if}}\left( t \right)={{T}_{p}}\cdot {{\text{e}}^{\text{j2 }\!\!\pi\!\!\text{ }\varepsilon \left( t \right)}}\cdot {{\text{e}}^{\text{-j}\frac{\text{4 }\!\!\pi\!\!\text{ }{{f}_{c}}}{C}R\Delta }}\cdot {{\text{e}}^{\text{-j2 }\!\!\pi\!\!\text{ }\frac{2\gamma R\Delta }{C}t}}.$ | (7) |
可以看出,去除RVP项和包络斜置项后,信号非线性失真和目标斜距不再相关,可以用e-j2πε(t)统一补偿.将补偿后的信号再变到频域即可取得理想的脉压效果
| ${{s}_{if}}\left( t \right)={{T}_{p}}\cdot \sin c\left( f+\frac{2\gamma {{R}_{\Delta }}}{C} \right)\cdot {{\text{e}}^{\text{-j}\frac{4\text{ }\!\!\pi\!\!\text{ }{{f}_{c}}}{C}{{R}_{\Delta }}}}.$ | (8) |
信号采样和成像处理流程为:参考由GPS数据换算出的延时及最大延时误差,根据第3节给出的原则,选取一段合适的回波去斜脉压以进行延时估计(这其中也需非线性失真的校正);根据延时估计结果,将连续采集的回波裁剪成等效脉冲信号并形成回波矩阵,去斜脉压后对信号进行非线性失真校正并方位成像.
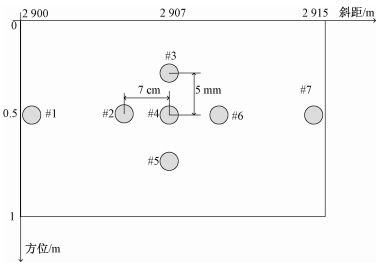
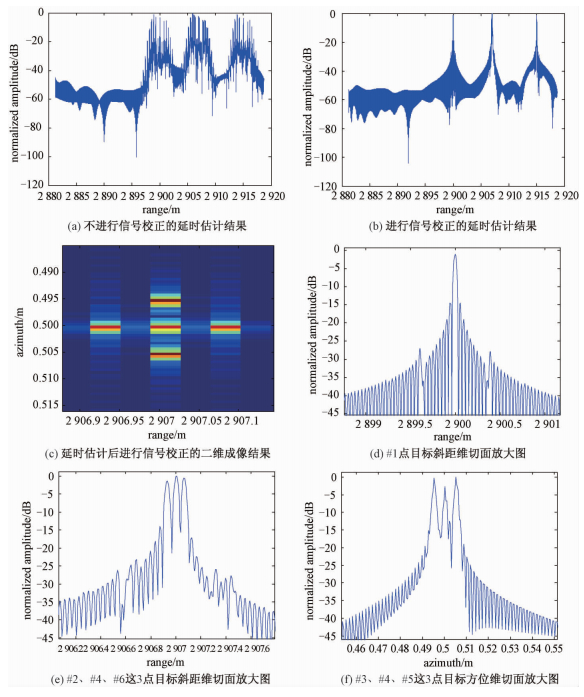
表 2给出本文的仿真参数,点目标位置及编号如图 3所示,场景中心的5个点目标斜距间隔7 cm,方位间隔5 mm.对比图 4(a)和图 4(b),RVP滤波法对信号进行了有效的非线性失真校正.校正后,延时估计精度有所提高;图 4(c)是场景中心的成像结果,可以看出5个点目标得到了清楚分辨;图 4(d)给出斜距最近的#1点目标的斜距维切面放大图(斜距最远的#7点目标与之基本相同,不再给出);图 4(e)给出#2、#4、#6这3点目标的斜距维切面放大图;图 4(f)给出#2、#4、#6这3点目标的方位切面放大图;可以看出,数字去斜并进行非线性失真校正后,脉冲压缩的主副瓣分布情况和高速采样下LFM信号脉压情况基本一致,斜距向和方位向均达到了预期分辨率.低采样率数字去斜应用于SAL的可行性得到验证.

|
Download:
|
|
图 3 点目标位置示意图 Fig. 3 Schematic diagram of target location |
|
{kind=link}
|
|
表 2 仿真参数 Table 2 Simulation parameters |

|
Download:
|
|
图 4 采样和成像仿真结果 Fig. 4 Simulation results of sampling and imaging |
|
{kind=link}
本文将低采样率数字去斜技术应用于SAL;分析系统的快时间采样率;给出成像处理流程.仿真验证了低采样率数字去斜应用于SAL的可行性.在本文参数下,对带宽4 GHz,线性度1/1 000的信号,快时间采样率设置为100 MHz即可满足要求,大幅度降低了SAL系统的数据量;若将快时间采样率设置为200 MHz,可使用单路AD实施采样,进一步简化系统.本文的研究工作对SAL的工程研制具有一定的参考价值.
| [1] | Brian W K, Joe B, Chris R. Synthetic aperture ladar flight demonstration[C].OSA/CLEO 2011:1-2. |
| [2] | 李道京, 张清娟, 刘波, 等. 机载合成孔径激光雷达关键技术和实现方案分析[J]. 雷达学报 , 2013, 2 (2) :143–151. |
| [3] | 杜剑波, 李道京, 马萌. 激光雷达宽带信号产生方法研究[J]. 中国激光 , 2015, 42 (11) :1–10. |
| [4] | 詹学丽, 王岩飞, 王超. 一种用于合成孔径雷达的数字去斜方法[J]. 雷达学报 , 2015, 4 (4) :474–480. |
| [5] | 梁毅. 调频连续波SAR信号处理[D]. 西安:西安电子科技大学, 2009. |
| [6] | 于雯, 赵思伟, 宋小全. 一种适用于合成孔径激光雷达非线性啁啾校正的频率变标成像方法[J]. 激光与光电子学进展 , 2013, 50 (7) :1–6. |
| [7] | 梁淮宁, 金廷满, 赵毅. SAR内定标技术和内定标精度分析[J]. 电子学报 , 2007, 35 (12) :2294–2297. |
| [8] | 杨震, 杨汝良. HJ-1-C卫星SAR系统的内定标[J]. 雷达学报 , 2014, 3 (3) :314–319. |
| [9] | 潘舟浩, 刘波, 李道京. 毫米波三基线InSAR系统误差校正和信号分析[J]. 电子与信息学报 , 2011, 33 (10) :2464–2470. |
| [10] | 邢孟道, 保铮, 李真芳, 等. 雷达成像算法进展[M]. 北京: 电子工业出版社, 2014 : 24 -30. |
| [11] | 陆必应, 梁甸农. 调频线性度对线性调频信号性能影响分析[J]. 系统工程与电子技术 , 2005, 27 (8) :1384–1386. |