 2016, Vol. 33
2016, Vol. 33 



2. 中国科学院大学, 北京 100049
2. University of Chinese Academy of Sciences, Beijing 100049, China
合成孔径雷达(synthetic aperture radar, SAR)是一种利用合成孔径技术来获取方位向高分辨率的二维成像雷达.由于实际中受到气流等因素的影响,载机运动会偏离匀速直线运动状态.而这种状态偏离会在回波信号中产生附加相位,使SAR图像散焦,因此必须对运动误差进行估计并补偿.出于成本、重量等因素的考虑,SAR成像系统通常先利用运动传感器数据对运动误差进行粗估计,然后利用自聚焦算法对回波相位进行精确补偿.因此自聚焦算法的研究是十分重要的.
在众多自聚焦算法中,相位梯度自聚焦(phase gradient autofocus, PGA)算法[1]由于估计精度高、鲁棒性好,得到了广泛应用.但是PGA算法严重依赖场景中的强散射点,在海洋、农田、沙漠等低对比度场景中效果不一定理想.于是有学者提出最优化自聚焦算法[2-7],该类算法以图像质量评价函数为代价函数直接搜索相位误差,不依赖场景中的强散射点,适用范围更广.常用的图像质量评价函数有对比度[2]、熵[3-5]、锐度[6-7]等.根据相位误差模型的不同,最优化自聚焦算法大致可以分为非参数模型算法[3-4]和参数模型算法[2, 5].非参数模型算法直接搜索相位误差,估计精度高但计算量大.参数模型算法只需要对模型中的参数进行搜索,所以计算量相对较小,计算效率比较高.但是参数模型只是对实际相位误差的一种近似,其估计精度有限.近年来有学者将自聚焦过程分成粗补偿和残差补偿2个阶段,混合使用不同的自聚焦算法[8-9],从而获得比较好的聚焦效果.但是此类算法计算过程比较复杂,应用场景有限.因此,研究最优化自聚焦算法中高精度的参数模型仍然十分重要.
现有的参数模型大都是基于一种多项式的模型,如二阶泰勒多项式[2]、四阶切比雪夫多项式[10]、自适应泰勒多项式[5, 7],此类参数模型可统称为单一模型,更适用于估计低频相位误差[11].随着SAR系统越来越多地应用于飞艇、无人机等小型化、轻型化平台,载机更加容易受到气流等环境因素的影响,载机运动状态变化周期远小于合成孔径时间,使相位误差中高频分量增多.此时如果继续采用传统的单一模型,则需要很高的阶数,并且逐阶估计的方法有可能导致估计值与真实值产生较大偏差[7].针对上述问题,本文提出一种混合模型,混合模型利用有限阶泰勒多项式估计低频相位误差,用自适应正弦多项式估计高频相位误差.该模型不仅考虑了低频相位误差而且估计出高频相位误差,相比于单一模型具有更高的估计精度.最后结合混合模型,本文以平方锐度作为代价函数,形成一套完整的自聚焦算法.
1 最优锐度自聚焦经典的自聚焦算法大都是针对聚束SAR提出的,若应用于条带SAR,则通常在方位向上划分子孔径,将子孔径内的条带SAR信号近似地作为聚束SAR信号进行处理.方位向存在相位误差的子孔径信号经过去斜(dechirp)、相位补偿和方位向FFT之后可以表示为
| $ \tilde g\left( {m,n;\phi } \right) = \sum\limits_{l = 0}^{M - 1} {\tilde u\left( {l,n} \right){e^{ - j\phi \left( l \right)}}{e^{ - j\frac{{2\pi }}{M}ml}}} , $ | (1) |
其中,m表示方位向频率,l和n分别表示方位向和距离向时间,
| $ \begin{array}{l} \tilde I\left( {m,n;\phi } \right) = {\left| {\tilde g\left( {m,n;\phi } \right)} \right|^2}\\ \;\;\;\;\;\;\;\;\;\;\;\;\;\; = \tilde g\left( {m,n;\phi } \right)\tilde g*\left( {m,n;\phi } \right), \end{array} $ | (2) |
图像锐度的定义为像素亮度的函数在方位向和距离向的累积[13],即
| $ {S_s}\left( \phi \right) = \sum\limits_m {\sum\limits_n {\varphi \left( {\tilde I} \right)} } , $ | (3) |
其中,
| $ \hat \phi = arg\mathop {max}\limits_\phi {\left[ {{S_s}\left( \phi \right)} \right]_{{S_s}\left( \phi \right) = \sum\limits_{m,n} {{{\tilde I}^2}\left( {m,n;\phi } \right)} }}. $ | (4) |
基于参数模型的最优锐度自聚焦算法一般将相位误差建模成单一模型,即
| $ \phi \left( l \right) = \sum\limits_k {{a_k}{\Psi _k}\left( l \right)} ,\;{\boldsymbol \theta} = \left( {{a_0},{a_1},{a_2}, \cdots ,{a_k}} \right), $ | (5) |
其中,Ψk(l)表示第k阶多项式,ak表示第k阶多项式的系数,θ表示待估参数向量.常用的多项式有泰勒多项式[5, 16]、切比雪夫多项式[10]和勒让德多项式[17].其中切比雪夫多项式和勒让德多项式可以看作泰勒多项式的变形,在相位误差阶数较高时,二者相比于泰勒多项式具有更高的估计精度.并且切比雪夫多项式和勒让德多项式具有正交性,待估参数向量θ不同维度之间的耦合性较低.根据阶数k选择的不同又可以分为有限阶多项式模型[10, 16]和自适应多项式模型[5, 7, 17].自适应多项式模型的最高阶数能够根据不同场景发生变化,极大地提高了相位误差的估计精度,增强了相位误差模型的鲁棒性.在相位误差中存在较多高频分量时,如果采用传统的单一模型则需要很高的阶数.并且由于锐度最优只是聚焦良好的必要条件,在参数搜索时锐度达到最优并不代表聚焦程度达到最优,估计出的相位误差有可能产生较大偏差.因此,传统的单一模型在估计高频相位误差时精度比较低.
本文将相位误差中的高频和低频分量分开处理
| $ \phi \left( l \right) = {\phi _{\rm{L}}}\left( l \right) + {\phi _{\rm{H}}}\left( l \right), $ | (6) |
其中,φL(l)和φH(l)分别表示相位误差的低频和高频分量.由于正弦多项式拟合高频信号具有较高的效率,因此可以采用泰勒多项式估计低频相位误差,采用正弦多项式估计高频相位误差.则相位误差模型变为
| $ \phi \left( l \right) = \sum\limits_{i = 0}^K {{a_k}{\Psi _k}\left( l \right)} + \sum\limits_{i = 1}^Q {{A_j}\sin \left( {{\omega _j}l + {\phi _{ej}}} \right)} , $ | (7) |
其中,K和Q分别表示泰勒多项式和正弦多项式的最高阶数,Aj、ωj、φej分别对应某一频率分量正弦函数的幅度、频率和相位.其中j的起始数是1而不是0,是因为i=0时已经代表了相位误差中的直流分量.传统的单一模型可以看作此模型在Q=0情况下的特例:
a)当Q=0, K≠∞时,该模型即有限阶多项式模型;
b)当Q=0, K=∞时,该模型即自适应多项式模型.
于是,待估参数向量也分成了低频参数向量θL和高频参数向量θH两个部分
| $ {{\boldsymbol \theta} _{\rm{L}}} = \left( {{a_0},{a_1},{a_2}, \cdots ,{a_k}} \right), $ | (8) |
| $ {{\boldsymbol \theta} _{\rm{H}}} = \left( {{A_1},{\omega _1},{\phi _{e1}},{A_2},{\omega _2},{\phi _{e2}}, \cdots ,{A_Q},{\omega _Q},{\phi _{eQ}}} \right). $ | (9) |
公式(7)是混合模型的精确形式,但是此模型还只是一个理论模型,需要对其进行简化近似才具有实用性.模型简化主要从以下4个方面进行考虑:
第一,低频相位误差阶数的选择.因为相位误差的常数项和线性项对图像锐度无影响,在进行相位误差估计时可暂时忽略,所以低频误差从二阶开始估计.低频相位误差影响最大的是二阶误差和三阶误差,高阶相位误差通常较小,因此在低频相位误差估计中可以近似地只估计a2和a3而暂时忽略高阶相位误差[16].另一方面,由于估计高频相位误差的某一频率分量时需要同时估计幅度和相位2个参数,此处也是2个参数,在参数搜索时可以采用相同的优化算法,以减小算法的复杂度.
第二,低频相位误差多项式的选择.切比雪夫多项式和勒让德多项式的优势只有在阶数较高时才能体现出来,而此处只估计了二阶和三阶多项式,并且残余低频相位误差可以用正弦多项式进行估计,因此低频相位误差模型选择泰勒多项式模型.
第三,高频相位误差频率的选择.本文借鉴了傅立叶级数的形式,先确定基频ω0,然后高阶正弦函数的频率是基频的倍数.文献[18]将高频相位误差的频率定义为合成孔径时间Ts倒数的2倍及以上.但是由上述分析可知,低频相位误差补偿后还存在残差,因此本文选择ω0=2π/Ts作为正弦函数的基频.
第四,高频相位误差阶数的选择.为使模型在不同场景下均具有较高的估计精度,本文采用了高频频率自适应的方法.本文方法不断地升高正弦函数的频率ωj,直到相邻频率间图像的锐度变化小于某一阈值.
所以,简化后的混合模型如式(10)所示.低频相位误差部分只保留了二阶和三阶泰勒多项式,在进行相位误差估计时只需要估计二阶系数a2和三阶系数a3,高频相位误差部分对每个频率分量jω0都需要估计对应的幅度Aj和相位φj.
| $ \phi \left( l \right) = {\alpha _2}{l^2} + {\alpha _3}{l^3} + \sum\limits_{j = 1}^\infty {{A_j}\sin \left( {{\rm{j}}{\omega _0}l + {\varphi _j}} \right)} . $ | (10) |
解决式(4)优化问题的必要条件是估计值为代价函数的驻点,即下式必须成立
| $ \frac{{\partial {S_s}}}{{\partial \phi }} = 0. $ | (11) |
针对相位误差参数模型,则上述方程变为
| $ \frac{{\partial {S_s}}}{{\partial \phi }} \cdot \frac{{\partial \phi }}{{\partial {\boldsymbol \theta} }} = 0. $ | (12) |
将式(6)代入方程(12),即低频相位误差和高频相位误差分开处理,则
| $ \frac{{\partial {S_s}}}{{\partial \phi }} \cdot \left( {\frac{{\partial {\phi _{\rm{L}}}}}{{\partial {\boldsymbol \theta} }} + \frac{{\partial {\phi _{\rm{H}}}}}{{\partial {\boldsymbol \theta} }}} \right) = 0. $ | (13) |
根据混合模型的假设,低频相位误差对高频参数求偏导的值应该为0,高频相位误差对低频参数求偏导的值也为0,所以有
| $ \frac{{\partial {S_s}}}{{\partial \phi }} \cdot \left( {\frac{{\partial {\phi _{\rm{L}}}}}{{\partial {{\boldsymbol \theta} _{\rm{L}}}}} + \frac{{\partial {\phi _{\rm{H}}}}}{{\partial {{\boldsymbol \theta} _{\rm{H}}}}}} \right) = 0. $ | (14) |
用泰勒多项式估计低频相位误差的可行性已经得到了广泛认可,在低频相位误差估计后可以近似得到
| $ \frac{{\partial {S_s}}}{{\partial \phi }} \cdot \frac{{\partial {\phi _{\rm{L}}}}}{{\partial {{\boldsymbol \theta} _{\rm{L}}}}} \approx 0. $ | (15) |
则方程(14)变为
| $ \frac{{\partial {S_s}}}{{\partial \phi }} \cdot \frac{{\partial {\phi _{\rm{H}}}}}{{\partial {{\boldsymbol \theta} _{\rm{H}}}}} = 0. $ | (16) |
至此,混合模型中高频分量的参数估计问题转化成偏导方程(16)的求解问题.针对某一频率分量,式(16)变为
| $ \frac{{\partial {S_s}}}{{\partial \phi }}\frac{{\partial {\phi _{\rm{H}}}}}{{\partial {A_j}}} = \frac{{\partial {S_s}}}{{\partial \phi }}\sin \left( {{\rm{j}}{\omega _0}l + {\phi _{ej}}} \right) = 0, $ | (17) |
| $ \frac{{\partial {S_s}}}{{\partial \phi }}\frac{{\partial {\phi _{\rm{H}}}}}{{\partial {\phi _{ej}}}} = \frac{{\partial {S_s}}}{{\partial \phi }}{A_j}\cos \left( {{\rm{j}}{\omega _0}l + {\phi _{ej}}} \right) = 0. $ | (18) |
在Aj≠0的情况下式(17)和式(18)同时成立则
| $ \frac{{\partial {S_s}}}{{\partial \phi }} = 0, $ | (19) |
即式(11),这说明假设某一频率分量jω0存在的情况下,正弦函数的引入可以反映真实的相位误差,所以用正弦多项式估计高频相位误差是可行的.
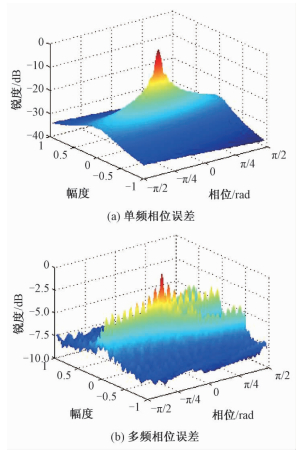
图 1反映正弦相位误差幅度和相位的估计值对点目标平方锐度的影响.在只存在单频相位误差时,幅度与相位的估计值是锐度的单峰函数,当幅度和相位的估计值取真实值时图像锐度达到最大,如图 1(a)所示.在存在少量更高频率分量的相位误差干扰时,幅度、相位的估计值与图像锐度的关系比较复杂,存在多个局部峰值,如图 1(b)所示.在搜索参数的时候很容易在局部峰值处停止搜索,从而陷入锐度的局部最优值.但是锐度依然在幅度和相位的真实值处取得最大值,在参数搜索时只需要排除局部最优即可.所以,可以通过最优化方法求解方程(16)的数值解.

|
Download:
|
|
图 1 正弦相位误差幅度与相位对点目标图像锐度的影响 Fig. 1 Relationships between amplitude, phase, and sharpness |
|
{kind=link}
综上所述,先采用泰勒多项式模型估计相位误差低频分量再采用正弦多项式模型估计相位误差高频分量的相位误差估计方式是可行的,即混合模型是可行的.换个角度去理解本文的混合模型,相当于在进行了二阶和三阶泰勒多项式相位误差估计之后,将残余低频误差和高频误差进行傅里叶级数分解,通过估计傅里叶级数的参数实现相位误差的估计.
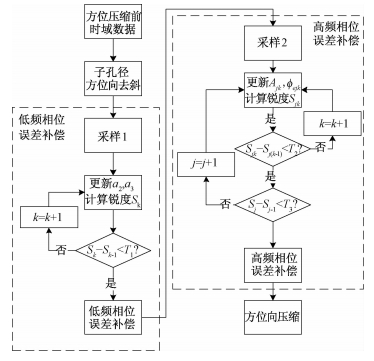
4 基于混合模型的自聚焦算法流程结合混合模型,本文以平方锐度为代价函数,利用最优化技术估计相位误差.本文方法可以分成2大阶段:低频相位误差补偿阶段和高频相位误差补偿阶段.每个部分又细分为采样、估计和补偿3个步骤.算法的详细流程如图 2所示.

|
Download:
|
|
图 2 算法流程图 Fig. 2 Flow chart of the algorithm |
|
{kind=link}
相位误差模型参数的估计过程是基于最优化技术的,由于存在局部最优问题和参数之间的耦合问题,所以本文在参数搜索时没有采用梯度相关算法,而采用了二维黄金分割法[19].为适应不同场景,采用图像锐度“低-高-低”的启发式方法来确定a2、a3和Aj初始搜索区间.由于正弦函数相位变化范围较小,相位的初始搜索区间采用固定值[-π/2, π/2].图 2中的T1、T2、T3分别表示低频参数搜索、高频参数内循环搜索、高频参数外循环搜索的图像锐度阈值.这3个阈值直接影响着聚焦效果和计算效率,在实际应用时需要进行权衡.
方位向相位误差在距离向具有冗余性,因此可以对原始数据进行采样,以减少迭代过程中的计算量.由于锐度大的距离门对参数搜索过程的影响大,所以抽取锐度最大的若干个距离门的数据作为采样数据.但是采样数据中距离门的个数与相位误差估计精度成正比[6],而且距离门的个数过多会显著增加计算量,因此在实际应用中距离门的个数需要权衡选择.由于低频相位误差补偿后,子孔径各个距离门的锐度会发生变化,所以需要在高频相位误差估计前重新对子孔径数据采样.
5 实验验证为验证混合模型的有效性,本文通过实验将本文方法分别与单一模型和PGA算法进行比较.实验数据为中国科学院电子学研究所某Ku波段的机载SAR数据,主要系统参数如表 1所示.成像平台为配有2.5 GHz Intel Core CPU、2 G内存、32位Windows7系统的计算机.
|
|
表 1 实际SAR系统参数 Table 1 Real SAR system parameters |
首先将一块聚焦良好的SAR图像加入已知误差,分别用文献[5]提出的自适应单一模型和本文提出的混合模型对相位误差进行最优锐度估计.2种方法的结果如图 3、表 2和图 4所示.

|
Download:
|
|
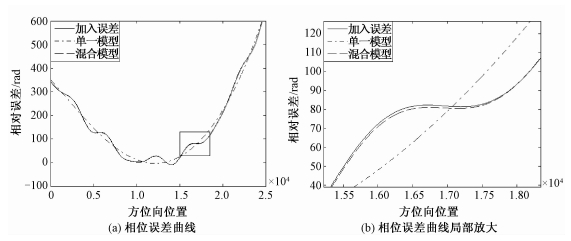
图 3 相位误差估计结果 Fig. 3 Estimated phase errors |
|
{kind=link}
|
|
表 2 误差已知情况下图像锐度对比 Table 2 Image sharpness comparison when error is known |

|
Download:
|
|
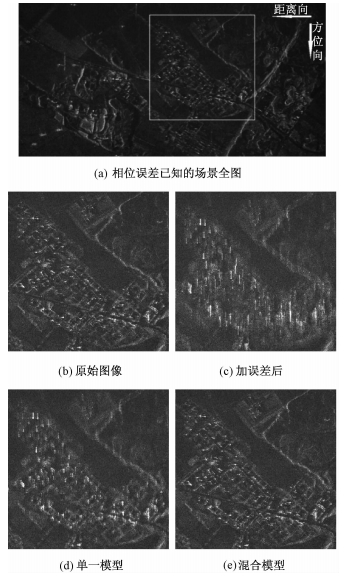
图 4 误差已知情况下自聚焦效果 Fig. 4 Autofocus results when error is known |
|
{kind=link}
图 3是相位误差估计结果的对比,其中实线为加入的相位误差,加入的相位误差中有较多的分量,点划线为单一模型的相位误差估计值,虚线为混合模型的相位误差估计值.可以看出,单一模型在停止参数搜索时相当于只估计了相位误差的低频分量,与原始误差有着较大偏差.混合模型得到的相位误差紧随添加的相位误差,具有很高的估计精度.
表 2是误差已知情况下图像锐度的对比.原始图像在加入相位误差后图像锐度明显降低.经过单一模型方法处理之后,图像锐度有了显著上升,但是与原始图像的锐度相差依然很大.经过本文方法处理之后,图像锐度与原始图像的锐度几乎相同.
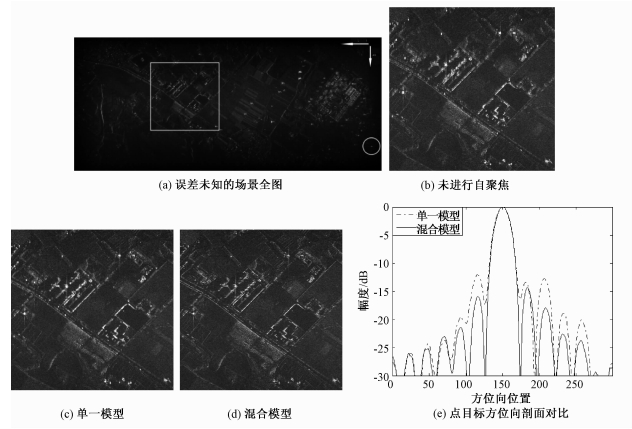
图 4是误差已知情况下自聚焦效果对比.图 4(a)是场景全图.图 4(b)—图 4(e)是场景中方框区域的局部放大.由图 4(c)可以看出原始图像加入相位误差后,出现了十分严重的散焦.图 4(d)是经过单一模型自聚焦方法处理之后的效果,聚焦效果略有好转,图像中的树林区域和道路轮廓已经可以辨认,但是点目标依然十分模糊,还存在一定程度的散焦.图 4(e)是经过混合模型自聚焦处理之后的效果,该图像与原始图像几乎相同.所以,该仿真实验证明本文方法具有很好的聚焦效果.
为进一步验证混合模型的相位误差估计效果,将单一模型和混合模型一起用于相位误差未知的实测数据中,处理结果如图 5和表 3所示.

|
Download:
|
|
图 5 误差未知情况下自聚焦结果 Fig. 5 Autofocus results when error is unknown |
|
{kind=link}
|
|
表 3 误差未知情况下自聚焦结果对比 Table 3 Result comparison when error is unknown |
图 5是误差未知情况下自聚焦效果对比.图中各种目标的散射特性相差较大,所以图像的对比度较高.如图 5(b)所示,利用运动传感器数据对原始SAR回波数据进行运动误差粗估计并补偿后,数据中仍然存在未知的相位误差,造成图像散焦.如图 5(c)所示,经过单一模型方法处理之后,图像的聚焦程度有所提高,场景中道路和农田的轮廓变得清晰起来.在经过本文方法处理之后,效果如图 5(d)所示,图像质量显著提高,聚焦效果明显优于单一模型方法,场景中道路、农田、树林的轮廓都更加清晰.图 5(e)是图 5(a)中右下角点目标的方位向剖面,该点目标峰值旁瓣比和3 dB宽度在表 3中给出.可以发现经过本文方法处理之后,相比于单一模型方法,点目标的主瓣宽度略有减小,旁瓣能量明显下降.而高频相位误差的主要影响就是旁瓣能量的升高,这充分说明混合模型在估计高频相位误差方面的优势.对比表 3中的图像锐度,经过混合模型自聚焦之后图像的锐度要明显高于单一模型自聚焦处理的结果.对比二者的计算效率,单一模型的总项数为12,而混合模型的总项数仅为7,并且在计算时间上,混合模型大约只有单一模型的一半,如表 3所示.正是由于正弦函数在拟合高频信号方面比泰勒多项式更有优势,所以混合模型的总项数要少于单一模型,进一步减少了计算用时,因此本文方法在计算效率上更有优势.上述结果充分说明了本文方法的有效性.
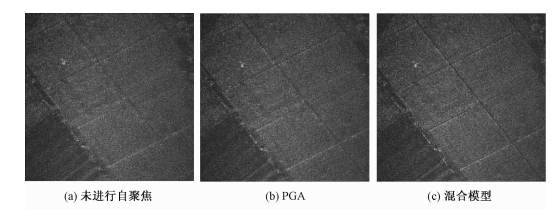
本文方法是在最优化自聚焦算法基础上对相位误差参数模型进行的改进,相比于PGA等基于强散射点的非参数模型算法,其优势在低对比度场景中更加突出.而PGA算法在高对比度场景中的优势已经被广泛认可,所以此处仅对低对比度场景下的聚焦效果进行对比,结果如图 6和表 4所示.图 6所示场景中的主要区域为农田,农田对吸收电磁波的能力较强并且农田散射特性分布比较均匀,所以图像的对比度较低.未进行自聚焦时,场景中田地之间的道路十分模糊,难以识别.在经过PGA算法处理之后,图像锐度有所提高,田地的轮廓变得清晰,道路已经可以辨认,但是图像依旧模糊.在经过本文方法处理之后,图像锐度显著提高,田地与道路十分清晰.两种方法的计算用时也相差也不大,充分说明了本文算法在低对比度场景下的有效性.

|
Download:
|
|
图 6 低对比度场景聚焦效果 Fig. 6 Comparison of results at low contrast scene |
|
{kind=link}
|
|
表 4 误差未知情况下自聚焦结果对比 Table 4 Autofocus result comparison when error is unknown |
传统的相位误差参数模型大都是单一模型,在相位误差中存在较多高频分量时,单一模型的相位误差估计值有可能与真实值存在较大偏差.本文针对上述问题提出混合模型.混合模型用有限阶泰勒多项式估计低频相位误差,用自适应正弦多项式估计高频相位误差.结合混合模型,本文方法以平方锐度作为代价函数,利用最优化技术估计SAR方位向相位误差.
本文方法是在最优化自聚焦算法的基础上对相位误差参数模型做出的改进.相比于传统的单一模型,混合模型考虑到相位误差中的高频分量,在相位误差中含有较多高频分量时,具有更高的相位误差估计精度;相比于基于强散射点的非参数模型自聚焦算法,本文方法不依赖于强散射点,在低对比度场景能够获得更好的效果.所以本文方法在轻型化、小型化的无人机载SAR数据处理上将会有广泛的应用前景.但是本文仅在相位误差参数模型上进行了改进,下一步还需要改进图像质量评价函数以更加全面地评价图像质量,还需要改进参数搜索算法以减少迭代,提高计算效率.此外,还可以借鉴混合算法的思想,将本文方法与其他自聚焦算法进行融合,进一步提高聚焦效果.
| [1] | Wahl D E, Eichel P H, Ghiglia D C, et al. Phase gradient autofocus:a robust tool for high resolution SAR phase correction[J]. IEEE Transactions on Aerospace and Electronic Systems , 1994, 30 (3) :827–835. DOI:10.1109/7.303752 |
| [2] | 刘月花, 荆麟角. 对比度最优自聚焦算法[J]. 电子与信息学报 , 2003, 25 (1) :24–30. |
| [3] | Li X, Liu G, Ni J. Autofocusing of ISAR images based on entropy minimization[J]. IEEE Transactions on Aerospace and Electronic Systems , 1999, 35 (4) :1240–1252. DOI:10.1109/7.805442 |
| [4] | Kragh T J. Monotonic iterative algorithm for minimum-entropy autofocus[C]//Proceedings of 14th Adaptive Sensor Array Processing Workshop (ASAP). Atlanta, 2006. |
| [5] | Wang J F, Liu X Z. SAR minimum-entropy autofocus using an adaptive-order polynomial model[J]. IEEE Geoscience and Remote Sensing Letters , 2006, 3 (4) :512–516. DOI:10.1109/LGRS.2006.878446 |
| [6] | Morrison R L, Do M N, Munson D C. SAR image autofocus by sharpness optimization:a theoretical study[J]. IEEE Transactions on Image Processing A Publication of the IEEE Signal Processing Society , 2007, 16 (9) :2309–2321. DOI:10.1109/TIP.2007.903252 |
| [7] | Gao Y, Yu W D, Liu Y B, et al. Sharpness-based autofocusing for stripmap SAR using an adaptive-order polynomial model[J]. Geoscience and Remote Sensing Letters, IEEE , 2014, 11 (6) :1086–1090. DOI:10.1109/LGRS.2013.2286410 |
| [8] | 张双喜, 孙光才, 周峰, 等. 一种基于子孔径自聚焦的高频运动误差估计和补偿方法[J]. 电子与信息学报 , 2010, 32 (12) :3013–3017. |
| [9] | Li J C, Wang P B, Chen J, et al. An improved two-step motion compensation method based on raw data[C]//Geoscience and Remote Sensing Symposium (IGARSS), 2015 IEEE International.2015:26-31. |
| [10] | Xiong T, Xing M D, Wang Y, et al. Minimum-entropy-based autofocus algorithm for SAR data using chebyshev approximation and method of series reversion, and its implementation in a data processor[J]. IEEE Transactions on Geoscience and Remote Sensing , 2014, 52 (3) :1719–1728. DOI:10.1109/TGRS.2013.2253781 |
| [11] | 高阳. 高分辨率机载SAR运动误差估计及自聚焦方法研究[D]. 北京:中国科学院大学, 2014. |
| [12] | 王岩飞. 合成孔径雷达相干目标的分辨力评定[J]. 电子科学学刊 , 1996 (3) :230–235. |
| [13] | Fienup J R, Miller J J. Aberration correction by maximizing generalized sharpness metrics[J]. Journal of the Optical Society of America A , 2003, 20 (4) :609–620. DOI:10.1364/JOSAA.20.000609 |
| [14] | 刘碧丹, 韩松, 王岩飞. 图像幅度和值最小化自聚焦算法[J]. 电子与信息学报 , 2009, 31 (4) :768–771. |
| [15] | Schulz T J. Optimal sharpness function for SAR autofocus[J]. Signal Processing Letters, IEEE , 2007, 14 (1) :27–30. DOI:10.1109/LSP.2006.881525 |
| [16] | 武昕伟, 朱兆达. 利用对比度最大化实现SAR图像自聚焦[J]. 现代雷达 , 2002, 24 (3) :20–22. |
| [17] | Cho K M, Hui L H. Autofocus method based on successive parameter adjustments for contrast optimization[P]. US, US7145496. 2006. |
| [18] | 张澄波. 综合孔径雷达:原理, 系统分析与应用[M]. 北京: 科学出版社, 1989 . |
| [19] | 宋巨龙, 钱富才. 基于黄金分割的全局最优化方法[J]. 计算机工程与应用 , 2005, 41 (4) :94–95. |