 2016, Vol. 33
2016, Vol. 33 


2. 中国科学院大学, 北京 100049
2. University of Chinese Academy of Sciences, Beijing 100049, China
DBF天线是天线和数字信号处理技术结合的产物,它的天线阵列由独立的天线单元组成,采用数字技术调整阵列中各天线的幅度和相位,在空间形成期望的天线方向图.其作为一种接收和发射都采用数字波束形成技术的全数字阵列天线,以其低功耗、波束加权灵活设定、可同时多波束以及波束指向灵活控制等优点在各个领域得到了广泛的研究和应用.
天线方向图是天线的重要指标[1].天线方向图中包含天线的很多信息,从中可获得以下参数[2]如波束宽度、副瓣水平、波束指向等.一般将波束曲线下降3 dB处定义为有效的波束宽度,又称3 dB主瓣宽度.这里的副瓣水平定义为第一副瓣水平.DBF天线通常用相邻波束比幅处理对目标实现测角,本文定义其差波束零点为波束指向.实际工作中需对上述参数进行测试[3],本文主要考虑远场条件.
天线远场的常规测试方法主要是将待测天线安装在接收转台上,通过精确改变天线在空间的机械指向,并调整天线与转轴的相对位置,使其相位中心尽可能接近测试转台的旋转轴.文献[4-5]描述远场测试天线方向图的方法,通过机械移动天线来获取其天线方向图.
DBF天线安装后,一般不具备可机械旋转的常规测试条件,因而天线远场的常规测试方法不再适用.本文研究其天线方向图间接测试问题,提出一种基于波束扫描的DBF天线方向图测试方法,并给出其测试原理和测试流程.为了将其与常规测试方法区别,我们称常规测试方法为常规旋转法,本文提出的方法为波束扫描法,定义由常规旋转法得到的DBF天线方向图为波束旋转方向图,由波束扫描法得到的DBF天线方向图为波束扫描方向图.通过波束扫描法获取DBF天线方向图以检查DBF天线的主要参数如波束宽度、副瓣电平以及波束指向.
1 波束扫描法的测试原理DBF天线可进行多波束形成[6-8],具有较强的方向性和较高的增益,并能实现波束电子扫描.
1.1 DBF多波束形成通过线阵列常规窄带波束形成[9-10],可在不同方位角上形成相应的DBF天线方向图,其表达式为
| $p(\Omega )={{w}^{H}}a(\Omega ),\Omega \in \Theta ,$ | (1) |
其中,wH是加权向量,它主要用于控制波束的形成,上标“H”表示共轭转置;a(Ω)是方向响应向量,其与方位角Ω和阵元位置有关;Θ是方位角范围.
式(1)是单波束DBF天线方向图的表达式.下面介绍多波束情况.
根据阵列信号处理模型[9-10],不同的加权向量对应不同的天线方向图,因而可通过改变加权向量来改变DBF天线方向图的波束中心指向.由5组不同的加权向量即可形成5个不同波束中心位置的DBF天线方向图,也就实现了同时5波束的数字波束形成.
| ${{p}_{i}}(\Omega )=w{{({{\Omega }_{i}})}^{H}}a(\Omega )cos{{\Omega }_{i}},i=1,2,3,4,5.$ | (2) |
设DBF天线波束指向角为Ω0,假设信号源发射信号为s(t).
| $x(t,{{\Omega }_{\text{spin}}})=s\left( t \right)\otimes p({{\Omega }_{\text{spin}}}),{{\Omega }_{\text{spin}}}\in \Theta ,$ | (3) |
这里Θ为旋转角范围,
将信号源发射信号归一化并将旋转角Ωspin看作方位角变量Ω,得
| $x(\Omega )=w{{({{\Omega }_{0}})}^{H}}a(\Omega )cos{{\Omega }_{0}},\Omega \in \Theta .$ | (4) |
为了降低DBF天线方向图的副瓣,通常对其幅度进行加权.设加权值为wm,则加权向量w变为
| $w({{\Omega }_{0}})={{w}_{m}}a({{\Omega }_{0}}).$ | (5) |
| $x(\Omega )=a{{(\Omega )}^{H}}a({{\Omega }_{0}}){{w}_{m}}cos{{\Omega }_{0}},\Omega \in \Theta ,$ | (6) |
式(6)即为通过常规旋转测试得到的波束旋转方向图的表达式.
下面以单波束为例,推导基于波束扫描的DBF天线方向图表达式.
| $x(t,{{\Omega }_{\text{scan}}})=s\left( t \right)\otimes p({{\Omega }_{\text{scan}}}),{{\Omega }_{\text{scan}}}\in \Phi ,$ | (7) |
这里Φ为扫描角范围.
将信号源发射信号归一化,将式(2)、式(5)代入式(7)中整理得
| $x({{\Omega }_{\text{scan}}})=a{{({{\Omega }_{\text{scan}}})}^{H}}a({{\Omega }_{0}}){{w}_{m}}cos{{\Omega }_{\text{scan}}},{{\Omega }_{\text{scan}}}\in \Phi .$ | (8) |
将扫描角Ωscan看作方位角变量,则
| $x\prime (\Omega )=a{{(\Omega )}^{H}}a({{\Omega }_{0}}){{w}_{m}}\text{cos}\Omega ,\Omega \in \Phi ,$ | (9) |
式(9)即为通过波束扫描测试得到的波束扫描方向图.
| $x\prime (\Omega )=x(\Omega )\frac{\cos \Omega }{\cos {{\Omega }_{0}}},\Omega \in (\Phi \cap \Theta ).$ | (10) |
从式(10)可以看出,与常规旋转法相比,由波束扫描法测试得到的DBF天线方向图只多了一个加权系数
当Ω接近指向角Ω0时,即在波束主瓣附近,二者的方向图接近.当Ω在Ω0-60°~Ω0+60°范围内时,二者的误差也在有限的范围之内.因而可利用波束扫描法近似得到DBF天线方向图.
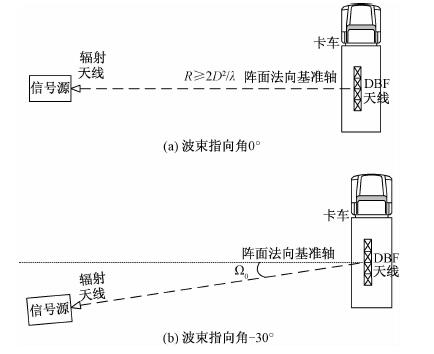
1.3 波束扫描法的测试流程下面结合车载DBF天线方位向方向图测试,介绍波束扫描法的测试流程:
1) 根据远场测试条件架设信号源,并使DBF天线俯仰向对准信号源,如图 1所示.根据需要可在待测DBF天线周围布设吸波材料;

|
Download:
|
| 图 1 车载DBF天线波束扫描法示意图 Fig. 1 Beam scanning method of vehicle DBF antenna | |
{kind=link}
2) 假定天线波束方位指向角为0°,在方位向移动信号源支架,使待测DBF天线阵面法向基准轴对准信号源辐射天线;
3) 设定信号源频率并辐射信号,根据DBF天线接收数据调整信号源功率到合适位置,通常要保证信噪比优于20 dB;
4) 使DBF天线以1°的间隔在方位向-60°~+60°实施波束扫描,记录每个扫描角对应的DBF天线接收数据,经插值获得波束指向角0°下的波束扫描方向图;
5) 根据需要设置DBF天线波束方位指向角为Ω0,在方位向移动信号源支架,使信号源辐射天线偏离待测DBF天线阵面法向基准轴Ω0.重复3)、4)过程,获得波束指向角Ω0下的波束扫描方向图.
2 波束扫描法的测试仿真 2.1 天线参数本文选用信号频率f=500 MHz,对应波长λ=0.6 m;阵元单位按线阵排列,阵元数M=16个,阵元间隔d=0.3 m;由DBF同时形成波束数N=5个,波束中心间隔ΔΩ=5°.这里所选阵元间隔等于半波长间隔,即d=λ/2,满足避免栅瓣产生的条件:d≤λ/2.根据远场测量条件[11]R≥2D2/λ求得远场测量最小距离.参数汇总如表 1.
|
|
表 1 DBF天线仿真参数 Table 1 Simulation parameters of DBF antenna |
由式(2)仿真得到不同波束指向角下的DBF多波束天线方向图,如图 2所示.DBF天线可同时形成5波束,波束排列方式如图中所示,自左向右依次为波束1(……)、波束2(-·-·-)、波束3(---)、波束4(—)、波束5(

|
Download:
|
| 图 2 DBF多波束天线方向图 Fig. 2 DBF multi-beam antenna pattern | |
{kind=link}
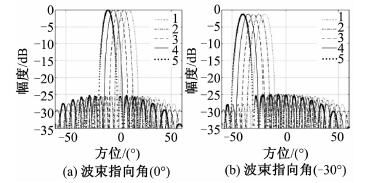
根据波束扫描法的测试流程,波束扫描角从-60°变化到60°的过程中,记录DBF天线接收数据,可依次把波束1、波束2、波束3、波束4、波束5扫描出来.波束扫描方向图的波束排列顺序与波束旋转方向图的波束排列顺序正好相反,并且关于波束指向角成中心对称.波束指向角0°和-30°上的波束扫描方向图如图 3所示.

|
Download:
|
| 图 3 波束扫描方向图 Fig. 3 Beam scanning pattern | |
{kind=link}
为评价本文提出的DBF天线波束扫描法的测试效果,在正常方向图和异常方向图两种情况下将其与常规旋转法作对比.这里主要考虑波束宽度、副瓣水平、波束指向等天线主要参数.
3.1 正常方向图情况下正常方向图情况下波束指向角0°和-30°的波束旋转方向图与波束扫描方向图如图 4所示.

|
Download:
|
| 图 4 正常方向图情况下的波束旋转方向图与波束扫描方向图 Fig. 4 Beam spinning pattern and beam scanning pattern in normal condition | |
{kind=link}
1) 波束宽度
正常方向图情况下的波束宽度对比情况如表 2所示.
|
|
表 2 正常方向图情况下的波束宽度(°)对比 Table 2 Comparison of beam width (°) in normal condition |
由常规旋转法得到的波束旋转方向图的波束宽度与波束中心位置有关,其波束中心位置越偏离0°即阵面法向方向,主瓣越宽.DBF天线的这一特点也在利用相邻波束比幅处理判断波束指向时为其带来了固有偏差.
由波束扫描法得到的波束扫描方向图的波束宽度与波束中心位置无关,其波束宽度均相同,只与波束指向角有关,波束指向角越偏离0°,波束扫描方向图的主瓣越宽.
波束扫描方向图的波束宽度与波束旋转方向图的宽度相比误差较小,其波束宽度与5波束中的中间波束(即波束3)的波束宽度非常接近,这由式(10)也可体现.
2) 副瓣水平
正常方向图情况下,波束指向角0°和30°上,常规旋转法得到的五波束副瓣水平均为-25 dB,波束扫描法得到的五波束副瓣水平均为-25.18 dB,可见波束扫描方向图的副瓣水平比波束旋转方向图的副瓣水平稍低,低0.18 dB.
3) 波束指向
如引言所述,DBF天线通常用相邻波束比幅处理对目标实现测角,本文定义其差波束零点为波束指向.DBF 5波束可在4个方位角上即每相邻的2个波束判断波束指向,如表 3所示.这里的指向偏差是将固有偏差(由不同波束中心位置Ω处天线方向图上的加权值cos(Ω)不同引入)考虑进去后得到的真实偏差.
|
|
表 3 正常方向图情况下的指向偏差(°)对比 Table 3 Comparison of directivity deviation (°) in normal condition |
波束指向角0°上波束扫描指向偏差小于0.05°;波束指向角-30°上波束扫描指向偏差较大,指向误差小于0.2°.
3.2 异常方向图情况下下面讨论方向图异常情况下波束旋转法与波束扫描法的仿真对比情况.这里将波束2仿真为波束指向异常,将波束4仿真为副瓣水平异常,仿真结果如图 5所示.从图 5的4幅图中均可以看出其中一个波束的副瓣水平明显异常.

|
Download:
|
| 图 5 异常方向图情况下的波束旋转方向图与波束扫描方向图 Fig. 5 Beam spinning pattern and beam scanning pattern in abnormal condition | |
{kind=link}
1) 波束宽度
异常方向图情况下的波束宽度对比情况如表 4所示.
|
|
表 4 异常方向图情况下的波束宽度(°)对比 Table 4 Comparison of beam width (°) in abnormal condition |
从表 4可以看出,波束指向角0°和-30°上,2种测试方法得到的方向图中,波束4的波束宽度均明显比其他几个波束的波束宽度小,这说明通过波束扫描法可检查出波束宽度异常的情况.
2) 副瓣水平
异常方向图情况下的副瓣水平对比情况如表 5所示.
|
|
表 5 异常方向图情况下的副瓣水平(dB)对比 Table 5 Comparison of sidelobe level (dB) in abnormal condition |
从表 5可以看出,波束指向角0°和-30°上,2种测试方法得到的方向图中,波束4的副瓣水平均明显比其他几个波束的副瓣水平高,这说明通过波束扫描法也可检查出副瓣水平异常的情况.
3) 波束指向
异常方向图情况下的波束指向对比情况如表 6所示.从表 6可以看出,波束指向角0°上,波束旋转方向图的4个方位角位置上均有指向偏差,-7.5°和-2.5°处的指向偏差较大,均约为0.5°,说明波束2的波束指向异常,2.5°和7.5°处也存在较小指向偏差,均约为0.18°,这主要由波束4的波束宽度(或副瓣水平)异常造成的.波束扫描方向图的测试结果与波束旋转方向图的测试结果非常接近.-30°指向角上,情况类似,但测试误差较大.这说明在较小的波束指向角上通过波束扫描法能很好地检查出波束指向异常的情况.
|
|
表 6 异常方向图情况下的波束指向(°)对比 Table 6 Comparison of directivity deviation (°) in abnormal condition |
本文主要介绍DBF天线波束扫描法在方位向的应用情况,该方法在原理上也可用于俯仰向方向图测试.仿真结果表明波束扫描法能有效地检查出DBF天线方向图异常情况.要特别说明的是,尽管当多个波束指向角DBF天线测试时需要移动信号源,使信号源对准波束指向角,这会给该方法的实际应用带来一些麻烦,但根据DBF天线的工作原理,实际上只在一个或少数波束指向角上实施测试,就可以判断DBF天线正常与否,这使得实际测试过程并不复杂.与常规旋转法相比,该方法简单有效、实用性强,尤其适用于常规旋转法不易实施的场合.
波束扫描法能得到与常规旋转法相近的测试结果,其不足之处,一是DBF天线的背瓣无法测试,二是在大指向角下引入的测试误差较大.在实际应用过程中,应注意此问题,可通过仿真分析确定可接受的误差范围.
| [1] | 林昌禄. 天线工程手册[M]. 北京: 电子工业出版社, 2002 . |
| [2] | 张祖稷, 金林, 束咸荣. 雷达天线技术[M]. 北京: 电子工业出版社, 2005 . |
| [3] | Salas-natera M A, Rodriguez-osorio R M, Haro L D. Procedure for measurement, characterization and calibration of active antenna arrays[J]. IEEE Transactions on Instrumentation and Measurement , 2013, 62 (2) :377–391. DOI:10.1109/TIM.2012.2217662 |
| [4] | Skolin M I. 雷达手册[M]. 北京: 电子工业出版社, 2003 . |
| [5] | Kopecký P, Závodný V. Measurement of far-field patterns of phased array antennas //Microwave Techniques (COMITE), 2015 Conference on[J]. Pardubice , 2015 :1–3. |
| [6] | 张光义. 多波束形成技术在相控阵雷达中的应用[J]. 现代雷达 , 2007, 29 (8) :1–6. |
| [7] | 苏保伟.阵列数字波束形成技术研究 .国防科学技术大学,2006. http://cdmd.cnki.com.cn/article/cdmd-90002-2007141039.htm |
| [8] | 黄玉学, 李其福, 桑微. 数字多波束技术信号处理算法研究[J]. 无线电工程 , 2006, 36 (7) :18–20. |
| [9] | 鄢社锋, 马远良. 传感器阵列波束优化设计及应用[M]. 北京: 科学出版社, 2009 . |
| [10] | Van Trees H L, Optimum array processing: Part IV of detection, estimation, and modulation theory[M]. Optimum array processing: Part IV of detection, estimation, and modulation theory[M]. New York: John Wiley & Sons Inc, 2002 . |
| [11] | 戴晴, 黄纪军, 莫锦军. 现代微波与天线测量技术[M]. 北京: 电子工业出版社, 2008 . |