 2016, Vol. 33
2016, Vol. 33 



2. 中国科学院大学, 北京 100049
2. University of Chinese Academy of Sciences, Beijing 100049, China
近距空中支援系统,以美国AC-130为例,大多采用光学传感器对目标进行探测和跟踪[1].尽管光学传感器具有波长短、测角精度高等优点,但易受大气衰减、灰尘和强光的影响,探测距离有限,很难适应天气多变、硝烟四起的战场环境.相比于光学传感器,合成孔径雷达(synthetic aperture radar,SAR)具有全天时、全天候、分辨率高以及穿透能力强等特点,不受雾、雨、云等恶劣天气的影响,成为目前对地观测和军事侦察的重要手段[2-3].VideoSAR(video synthetic aperture radar)的概念于2003年由美国桑迪亚国家实验室(Sandia National Laboratories)的Lars Well等[4]首先提出,即以类似电影(movie-like)的方式再现场景信息,实现对机动目标的动态观测.此概念的提出,引起了遥感界的广泛关注[5-10].2012年,美国国防部高级研究计划局(Defense Advanced Research Projects Agency,DARPA)提出,要开发一套完整的极高频(extremely high frequency,EHF)、全动视频(full-motion video)、高分辨率ViSAR(video synthetic aperture radar)系统,并于同年先后发布2份BAA(broad agency announcement)文件,向全球征询ViSAR系统的设计和开发理念[1, 5].显然,VideoSAR作为一种新的成像模式,一旦实现高分辨率、实时处理,就可以对敌方车辆、坦克、军舰等目标的地理位置、移动方向、移动路线甚至速度等进行全天候跟踪监视,及时掌握敌军的最新发展动态.
目前,国外很多学者和机构都展开了对VideoSAR的研究,国内关于VideoSAR的开发尚处于起步阶段,如何实时获取高分辨率连续图像序列,成为主要研究热点[6].文献[1]基于圆迹SAR,间隔一定的雷达视线转角,生成多幅图像,通过对图像序列进行非相干叠加,以降低图像的相干斑,提高图像对比度.该方法主要应用于分析图像的静态特征,对于动态场景,作者并没有做出详细讨论.文献[6]对VideoSAR的每帧(frame)图像进行子孔径(sub-aperture)划分,综合考虑内存需求和旁瓣抑制,提出一种分段多项式孔径加权法,提高了每帧图像的方位分辨率.文献[8]提出一种自聚焦方法,无需考虑雷达平台的位置,通过对Pseudo point-scatterers进行相位梯度的估计,得到固定方向的良好聚焦VideoSAR图像.文献[9]引入子孔径循环移位思想以提高计算效率,使实时获取VideoSAR图像成为可能.此外,作为VideoSAR的应用之一,文献[10]将其得到的大量图像进行相干变化检测(coherent change detection,CCD),在不牺牲空间分辨率的前提下,引入时间平均,提高了图像的相干估计.
VideoSAR的成像模式主要分为3类:条带式、聚束式以及圆迹式.其中条带SAR的数据获取以及处理算法最为简单,但观测时间有限.聚束SAR在载机飞行过程中,天线波束始终指向目标点,观测时间较长.圆迹SAR作为一种特殊的聚束模式,采用圆周运动轨迹实现对目标的观测,在保证一定图像分辨率的同时,能够在聚束SAR的基础上,进一步扩展观测时间.当前,关于VideoSAR的研究主要基于聚束式或圆迹式[6-9],还没有基于条带式VideoSAR的研究,而且其工作重点主要集中在对产品的推广以及硬件实现上,对VideoSAR基本成像原理的介绍以及VideoSAR系统各参数指标之间的依赖关系并没有进行详细讨论.由于在实际中,聚束SAR和圆迹SAR对系统设计以及载机的飞行路径要求较高,实现起来较为复杂.相比之下,条带模式的雷达平台匀速扫过地面,天线指向保持不变,关于条带SAR的数据获取及后期处理的研究都更为成熟.因此,能否在传统的条带模式下实现VideoSAR的处理,对于VideoSAR基本原理的掌握以及后续研究都有一定的参考价值.本文基于条带SAR,详细阐述无重叠和有重叠2种提取帧数据方式,对图像分辨率以及帧率的影响,并通过仿真实验,成功实现了条带式VideSAR模型下,对静止目标以及运动目标的观测.
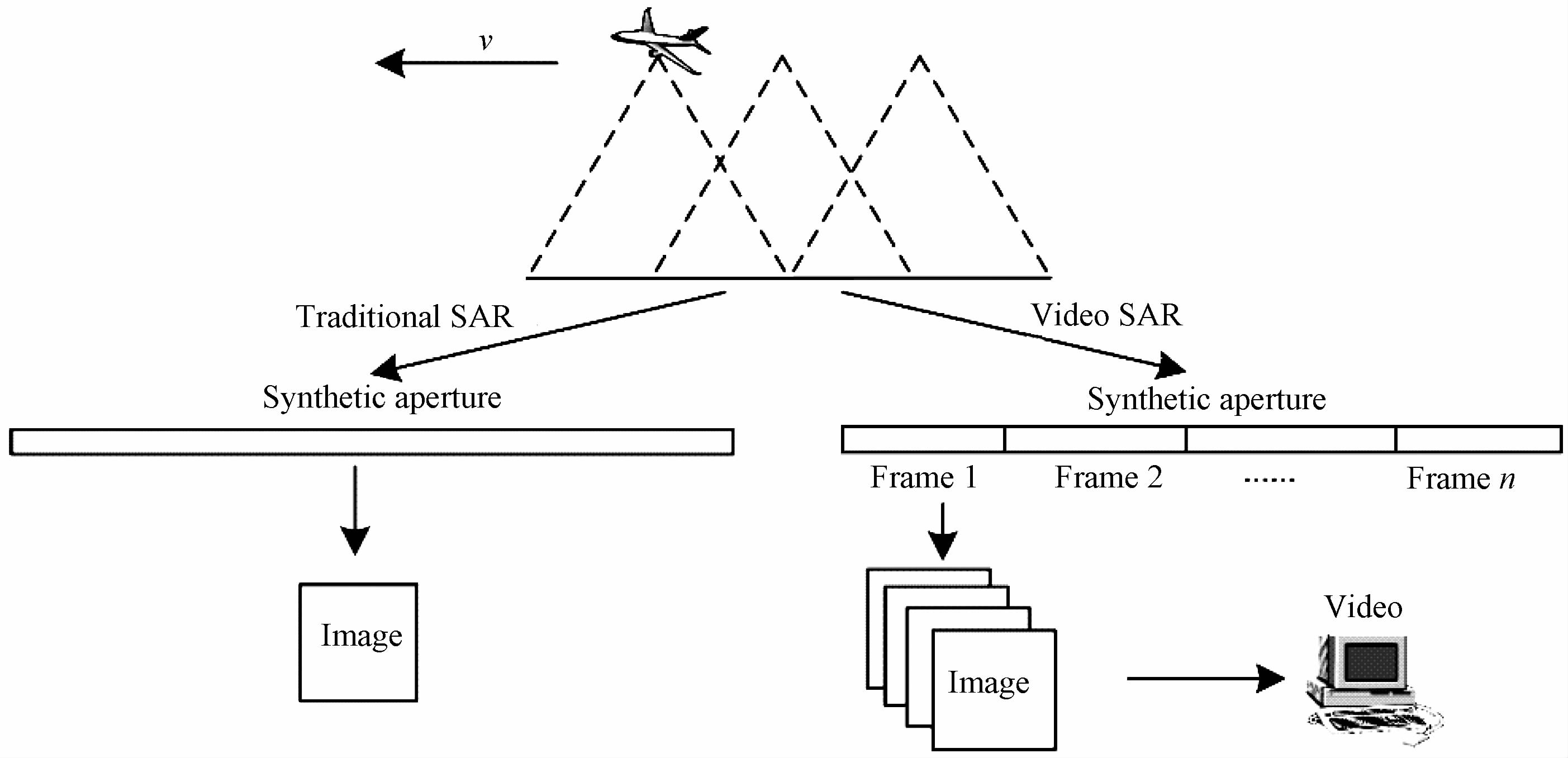
1 VideoSAR模型分析 1.1 VideoSAR的基本原理传统SAR在合成孔径时间内,对观测场景进行单一成像,如图 1所示,而VideoSAR以一定方式对合成孔径时间内的数据进行切分(可重叠),对每一帧数据进行成像处理,从而获得观测场景的图像序列,并以视频方式再现场景信息.对于VideoSAR的性能评估主要包含3个方面[1]:图像分辨率(resolution)、帧率(frame rate)以及观测场景(field of regard)的大小.其中图像的距离向分辨率主要取决于发射脉冲的带宽,方位分辨率则主要取决于实际的帧数据提取方式,为此,可以考虑给定分辨率指标,分别以无重叠和有重叠2种方式,对合成孔径时间内的数据进行提取时,视频帧率将如何改变.

|
Download:
|
| 图 1 VideoSAR基本原理 Fig. 1 The fundamentals of VideoSAR | |
{kind=link}
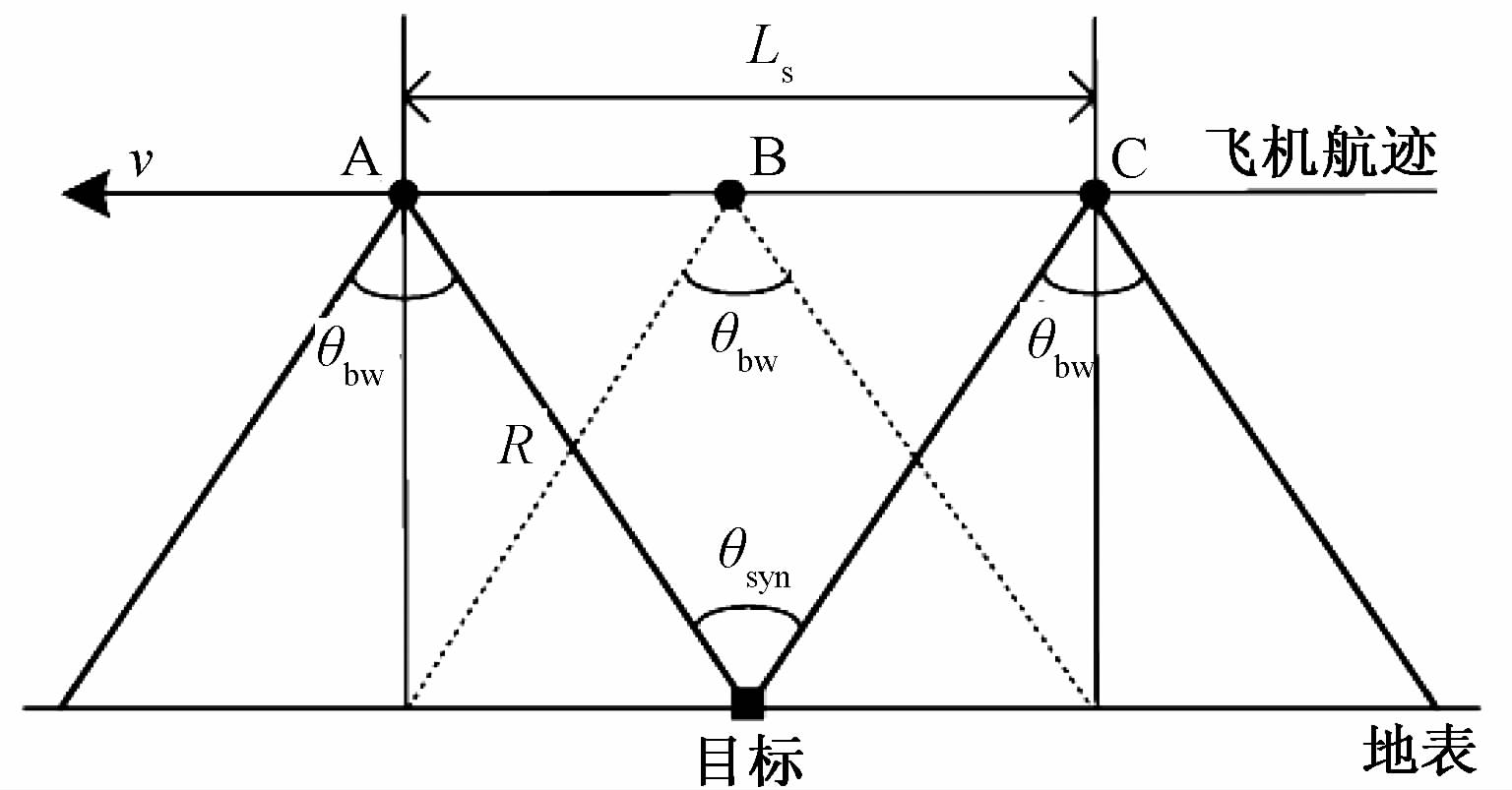
图 2为机载SAR方位向波束宽度和合成角的空间几何模型.假定为正侧视,载机飞行速度为v,雷达工作频率为f0,天线方位向长度为La,波束宽度为θbw=0.886c/(f0La),合成角θsyn=θbw,雷达合成孔径长度为Ls,载机到目标的最近斜距为R,则方位向分辨率[2]为
| $~{{\rho }_{a}}=\frac{0.886c}{2{{f}_{0}}{{\theta }_{syn}}}{{\gamma }_{w,a}}.$ | (1) |

|
Download:
|
| 图 2 天线方位向波束宽度θ Fig. 2 Antenna azimuth beamwidthθbwand synthetic angleθsyn | |
{kind=link}
其中,γw,a为处理中加窗引入的IRW展宽因子.从空间几何关系图中,可以得到合成孔径长度为
| $~{{L}_{s}}\approx {{\theta }_{syn}}R.$ | (2) |
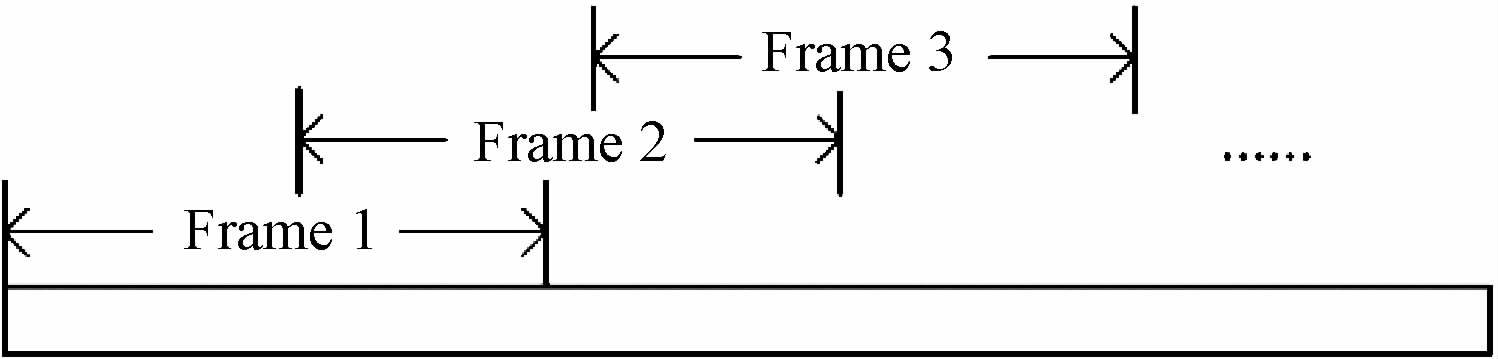
以图 3所示无重叠方式,在合成孔径内进行每帧数据的提取,联合式(1)和式(2),设帧率为F,可得

|
Download:
|
| 图 3 VideoSAR帧数据的无重叠提取 Fig. 3 VideoSAR frames formed from non-overlapping sub-apertures | |
{kind=link}
| $~F=\frac{v}{{{L}_{s}}}=K\frac{v{{\rho }_{a}}}{cR}{{f}_{0}},$ | (3) |
| $F\propto \frac{v{{\rho }_{a}}}{R}{{f}_{0}},$ | (4) |
其中,K=2/(0.886γw,a)为常量.
由式(4)可知,对一定范围内的目标进行观测,需通过提高雷达工作频率,以实现较高帧率,从而保证视频画面的流畅性.此外,雷达工作频率的提高,会使合成孔径变短,进而减小机动目标的方位向散焦.
1.3 有重叠帧数据提取对帧率的影响分析在合成孔径内,无重叠提取每帧VideoSAR数据,要求雷达工作在较高频段,后文将会给出,雷达至少应工作在THz频段.为此,考虑到现有硬件技术的限制,我们以百分比为α的重叠率进行每帧数据的切分,如图 4所示.

|
Download:
|
| 图 4 VideoSAR帧数据的有重叠提取 Fig. 4 VideoSAR frames formed from overlapping sub-apertures | |
{kind=link}
假设每一帧VideoSAR数据对应的子孔径长度为L0(L0≤Ls),每帧数据间的重叠百分比为α,设此时的帧率为F',则由几何关系可推得
| $~F\prime \left( 1-\alpha \right){{L}_{0}}=v,\text{ }\alpha <1,$ | (5) |
| $F\prime =\frac{v}{{{L}_{0}}\left( 1-\alpha \right)},\text{ }\alpha <1,$ | (6) |
此时,每帧图像对应的方位向合成角为
| $\rho {{\prime }_{a}}=\frac{0.886c}{2{{f}_{0}}\theta {{\prime }_{syn}}}{{\gamma }_{w,a}},$ | (7) |
综合式(6)和式(7)可得
| $~F\prime =K\frac{v\rho {{\prime }_{a}}}{cR\left( 1-\alpha \right)}{{f}_{0}},$ | (8) |
| $F\prime \propto \frac{v\rho {{\prime }_{a}}}{R\left( 1-\alpha \right)}{{f}_{0}}.$ | (9) |
为保证在视频播放过程中,观测者可以检测到运动目标的变化情况,假定目标运动速度为(vr,va),其中vr为距离向速度,va为方位向速度,在2帧图像的间隔时间内,目标在距离向和方位向跨过的分辨单元数为(nr,na),则
| ${{v}_{r}}\frac{1}{F\prime }={{n}_{r}}{{\Delta }_{r}},$ | (10) |
| ${{v}_{a}}\frac{1}{F\prime }={{n}_{a}}{{\Delta }_{a}},$ | (11) |
其中,Δr和Δa分别表示距离向和方位向分辨单元的长度.将式(6)分别代入式(10)、式(11),可以推得
| $~{{n}_{r}}=\frac{{{v}_{r}}{{L}_{0}}\left( 1-\alpha \right)}{v{{\Delta }_{r}}},\text{ }\alpha <1,$ | (12) |
| ${{n}_{a}}=\frac{{{v}_{a}}{{L}_{0}}\left( 1-\alpha \right)}{v{{\Delta }_{a}}},\text{ }\alpha <1.$ | (13) |
此时,只需调整观测场景的大小,以及载机的运行速度,同时根据目标的移动速度,适当选择数据帧的重叠百分比,即可获得预期的帧率指标.
为了比较上文2种提取帧数据的方式,对视频帧率的影响,我们假定γw,a=1,天线方位向长度La=0.4 m,景中心斜距R=5 km,雷达有效速度v=65 m/s[9].依据式(3),本文对不同波段的视频帧率进行了计算,结果见表 1.由表中数据可以看出,以无重叠方式提取每帧数据时,为保证视频画面的流畅性,雷达应至少工作在THz波段.而有重叠提取方式下,由式(8)可知,VideoSAR系统可进一步通过增大每帧数据的重叠百分比来提高帧率.这里假设每帧数据对应的子孔径长度L0=20 m,帧之间的重叠百分比α=85%.由式(6)可得,此时视频帧率F'=21.67 fps,即在每帧图像对应的子孔径长度L0(L0<Ls)一定的前提下,雷达工作频率只决定了每帧图像的方位分辨率(依据式(7)),与视频帧率无关(依据式(6)),且持续相同的观测时间(受限于有效的合成孔径长度),有重叠提取时,VideoSAR系统可利用的有效合成孔径数据更多,可获得更多的方位向高分辨率图像序列.因此,本文主要基于有重叠帧数据提取法,并通过点目标仿真实验,以实现条带模式下的VideoSAR处理.
|
|
表 1 不同波段无重叠帧数据提取方式下的帧率 Table 1 Frame rates within different wavebands for non-overlapping sub-apertures |
关于每帧数据的成像处理,传统的频域算法,如RDA、CSA等[2]均可完成,本文采用的是后向投影(BP)算法[11].同其他频域串行处理算法相比,该算法具有其特殊的优点.BP算法是一种基于时域处理的并行成像算法,通过计算成像区域内每一点到天线平台的双程时间,将回波信号进行相干叠加,从而恢复出每个像素的目标函数.该算法可以在载机飞行的同时(方位向进行采样),连续地输出成像结果.随着合成孔径积累角的逐渐增大,输出图像的分辨率会逐渐变高,在内存中只需存储每个方位采样位置的回波数据.这些特点非常适合于VideoSAR的图像生成.这是因为VideoSAR每帧图像所对应的子孔径间会有较大比例的重叠区域,采用BP算法,系统只需要在内存中找到每帧图像对应的子孔径起始点,在与前一帧图像所对应的重叠区域回波数据累加结果的基础上,再叠加入起始点限定范围内的新的回波数据,即可得到新的一帧图像,这样就避免了重叠区域的重复计算,进而提高成像速率.此外,该算法本身非常适合于作并行处理,可方便地实现结构完全相同的并行处理模块,特别是近年来,随着GPU(graphical processing unit)并行技术的发展和进步,为使用 BP 算法实现实时大场景VideoSAR模型观测提供了可能.
由于BP算法已经是一种很成熟的SAR处理算法,具体到处理某一帧图像时,该算法在VideoSAR中的应用与在传统SAR中的应用并没有很大区别,这里不再赘述BP的具体算法流程,读者可参阅文献[11-13]了解该算法的具体实现步骤.
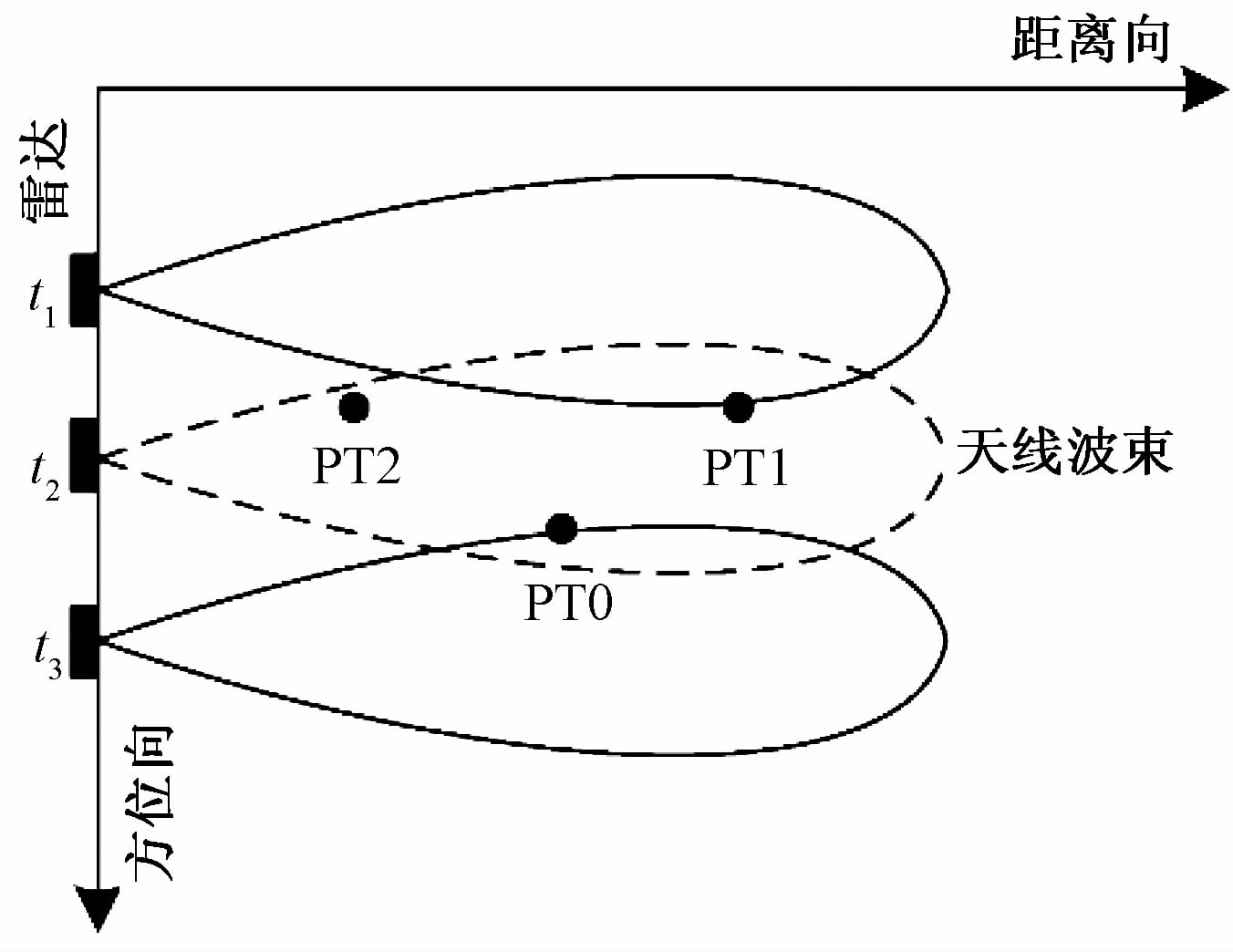
2 仿真实验与分析 2.1 数据模型及仿真参数的设定场景设置如图 5所示,PT0为场景中心处点目标,由PT0向场景远端间隔40 m放置一个点目标PT1,由PT0向场景近端间隔40 m放置一个点目标PT2.其中PT0和PT1为静止点目标,PT2分别设成静止和匀速运动2种场景,具体参数值参见表 2.

|
Download:
|
| 图 5 仿真场景设置 Fig. 5 Scene geometry for simulation | |
{kind=link}
|
|
表 2 VideoSAR仿真参数 Table 2 Parameters for VideoSAR simulation |
依据以上分析,本文以精确回波延时公式生[LL]成回波[2],采用BP算法,对距离压缩后的数据,以有重叠方式提取每帧数据,分别对静态场景和存在匀速运动目标的场景进行VideoSAR仿真.由式(6)、式(12)和式(13)可以推得,此时每帧图像的距离向分辨率[2]ρr≈0.886c/(2|Kr|Tp)≈2 m,方位向分辨率ρ'a=0.64 m,帧率为37.50 fps,在静态场景下有效观测时间Te≈1.70 s.存在动目标时,观测时间可随方位向运动继续增加,每帧数据覆盖的场景大小(方位向×距离向)为34.67 m×375.00 m,运动目标在2帧间隔时间内跨过的分辨单元个数nr≈0.38,na≈4.43.此处,依据式(2),天线的方位向有效合成孔径Ls=110.75 m>L0,所以实际每帧图像的方位向分辨率ρ'[KG-*2]a(0.64 m)低于全孔径分辨率ρa(0.2 m).
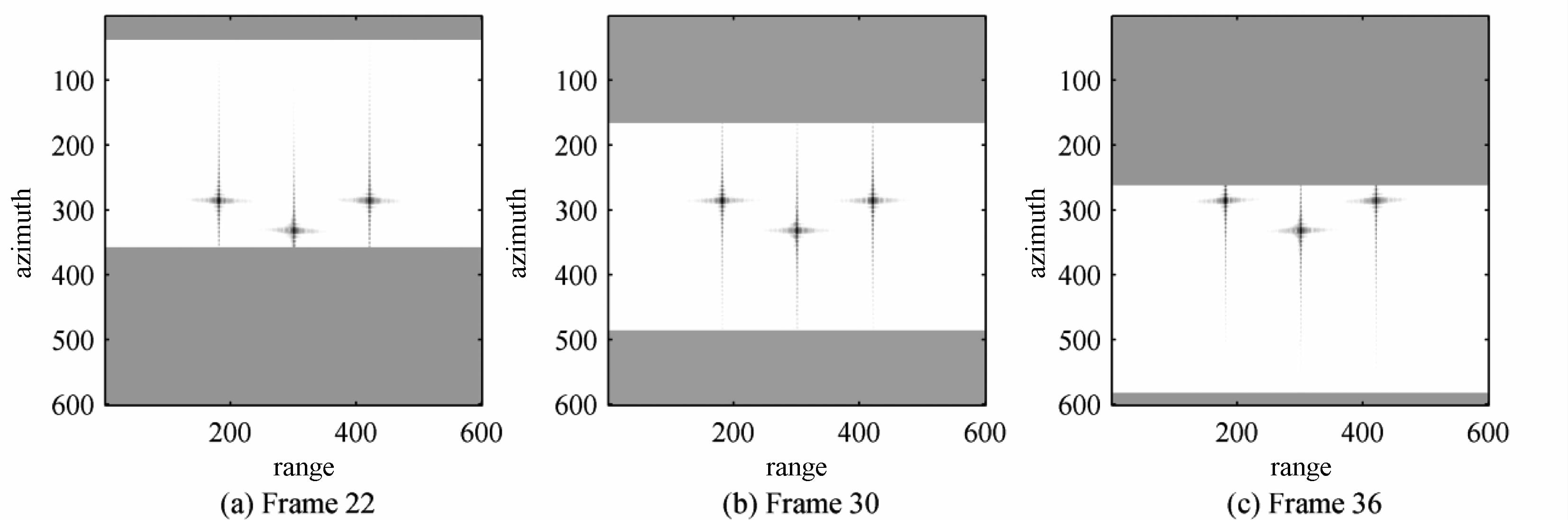
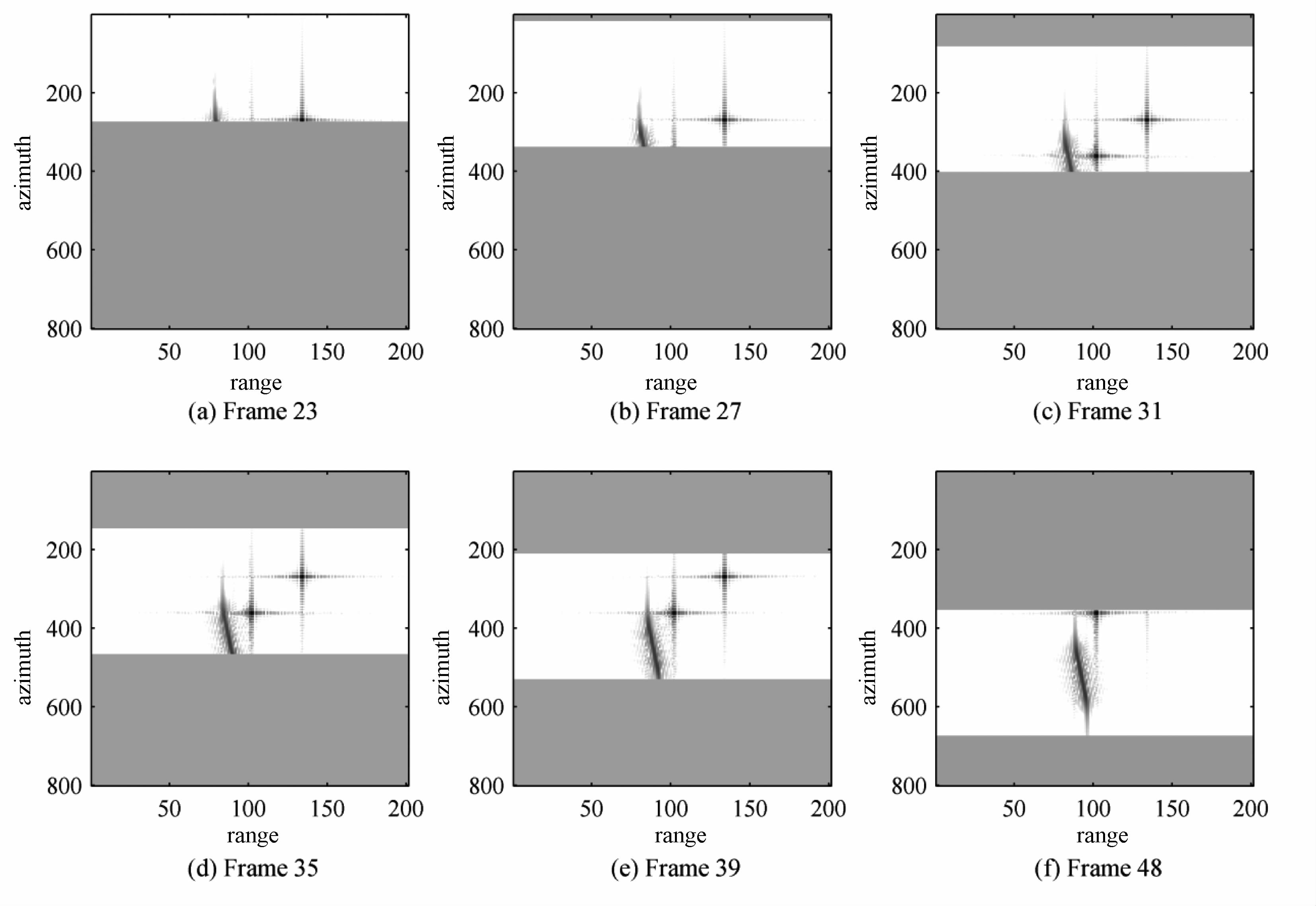
实验结果如图 6—图 8所示.图 6为3个静止点目标,图 7的PT0和PT1静止,PT2沿距离和方位向以速度(vr,va)做匀速直线运动.可以看出,在每帧图像的波束覆盖范围内(图 6、图 7的亮色区域),静止目标点得到了良好聚焦,运动目标在相应方向上发生了散焦,其中图 6的3个静止点在每帧图像中保持位置不变,图 7中PT2相对于静止点PT0和PT1,发生自左上向右下的运动,体现了目标的运动信息.

|
Download:
|
| 图 6 静态点目标场景VideoSAR仿真 Fig. 6 VideoSAR simulations for stationary point targets | |
{kind=link}

|
Download:
|
| 图 7 动态点目标场景VideoSAR仿真 Fig. 7 VideoSAR simulations for moving point targets | |
{kind=link}
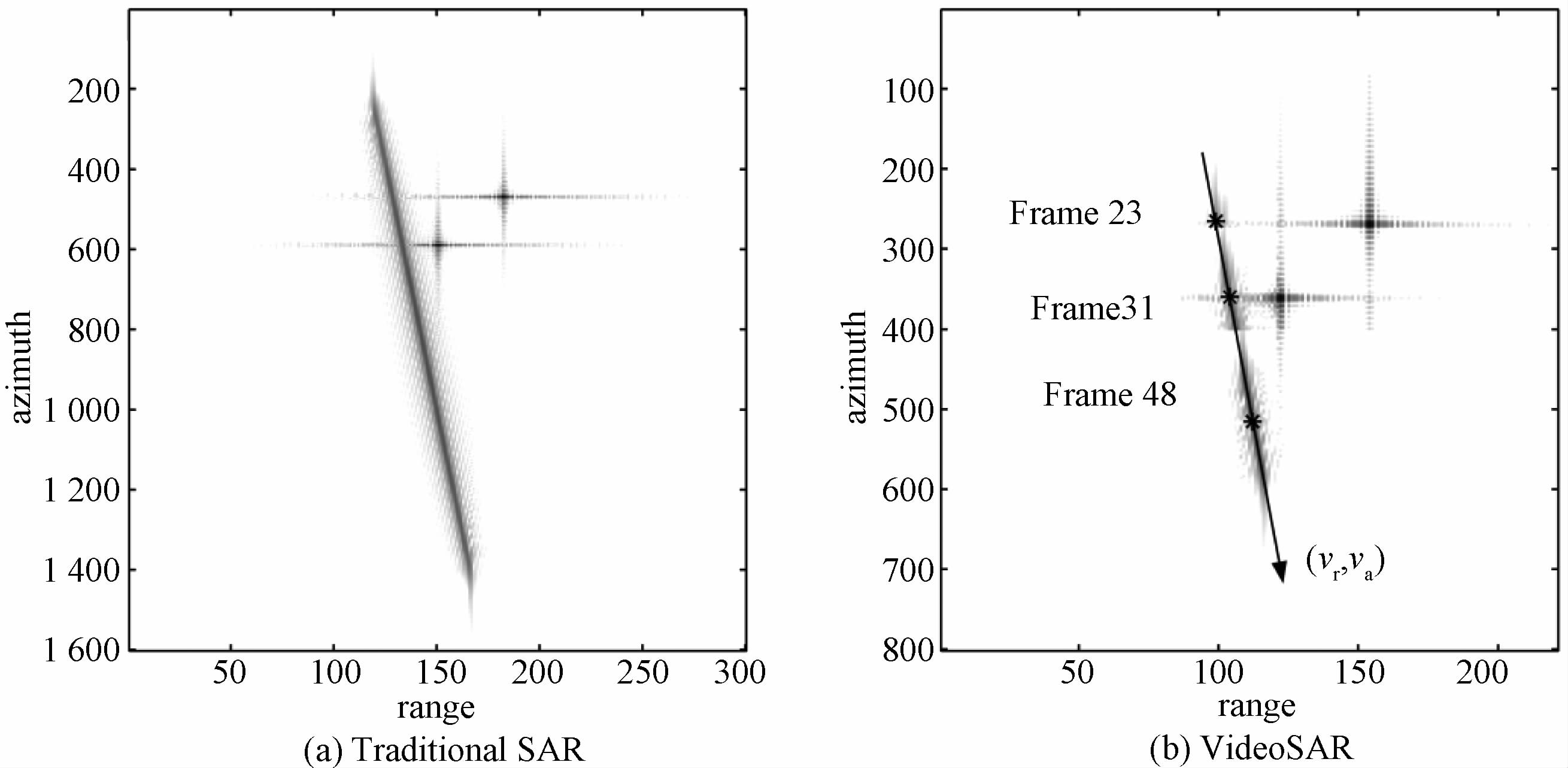
图 8对传统SAR和VideoSAR做了对比,其中图 8(a)是传统SAR体制下,对合成孔径内的有效数据进行成像,图 8(b)将第23、31和48帧图像叠加,从对比图中可以看出,相比于对观测场景进行单一成像的传统SAR体制,VideoSAR以视频方式对场景信息进行实时再现,在视频中可以明显观测到运动目标的变化情况(如PT2),使运动目标的识别及其地理位置的实时监测变得更加容易.

|
Download:
|
| 图 8 传统SAR和VideoSAR的对比 Fig. 8 Comparison between traditional SAR and VideoSAR | |
{kind=link}
本文分别在有重叠提取帧数据和无重叠提取帧数据2类模式下,推导了条带式VideoSAR帧率、分辨率和雷达工作频率的依赖关系式,为VideoSAR的系统参数设计提供了参考,并采用BP算法,通过对静止和运动点目标进行仿真实验,验证了本文所述条带式VideoSAR的正确性和可行性.
VideoSAR对于战场侦察具有重要意义,目前国内关于VideoSAR的研究尚处于起步阶段,因此,考虑到现有硬件实现的复杂性,根据场景需求以及成像性能分析,开发多种成像模式,提高算法效率和图像质量,特别是对机动目标方位向散焦的处理,是我们下一步的主要研究方向.
| [1] | Defense Advanced Research Projects Agency. Broad agency announcement: video synthetic aperture radar (ViSAR) system design and development [R/OL]. (2012-05-01)[2014-01-15]. https://www.fbo.gov/index?s=main&mode=list&tab=list. |
| [2] | Cumming IG, Wong FH. Digital processing of synthetic aperture radar data: algorithms and implementation[M]. London: Artech House, 2005 : 3 -215. |
| [3] | Riely B. Comparison of infrared and millimeter-wave imager performance in adverse weather conditions[R]. Army research lab adelphi md, 1997. http://cn.bing.com/academic/profile?id=185989860&encoded=0&v=paper_preview&mkt=zh-cn |
| [4] | Wells L, Sorensen K, Doerry A, et al, Developments in SAR and IFSAR systems and technologies at sandia national laboratories[C]//Proceedings of Aerospace Conference 2003. IEEE, 2003, 2: 1085-1095. http://cn.bing.com/academic/profile?id=2103718934&encoded=0&v=paper_preview&mkt=zh-cn |
| [5] | Defense Advanced Research Projects Agency. DARPA seeks technology to see through clouds for warfighter support [OL]. (2012-05-02)[2014-01-17].http://www.darpa.mil/Our_Work/STO/Programs/Video_Synthetic_Aperture_Radar_(ViSAR).aspx. |
| [6] | Hawley RW, Garber WL. Aperture weighting technique for video synthetic aperture radar[C]//SPIE Defense, Security, and Sensing. International Society for Optics and Photonics, 2011: 805107. |
| [7] | Damini A, Balaji B, Parry C, et al. A videoSAR mode for the X-band wideband experimental airborne radar[C]//SPIE Defense, Security, and Sensing. International Society for Optics and Photonics, 2010: 76990E. |
| [8] | Linnehan R, Miller J, Bishop E, et al. An autofocus technique for video-SAR[C]//SPIE Defense, Security, and Sensing. International Society for Optics and Photonics, 2013: 874608. |
| [9] | Miller J, Bishop E, Doerry A. An application of backprojection for video SAR image formation exploiting a subaperature circular shift register[C]//SPIE Defense, Security, and Sensing. International Society for Optics and Photonics, 2013: 874609. |
| [10] | Damini A, Mantle V, Davidson G. A new approach to coherent change detection in VideoSAR imagery using stack averaged coherence[C]//Radar Conference (RADAR), 2013 IEEE. IEEE, 2013: 1-5. http://link.springer.com/chapter/10.1007%2F978-3-662-49155-3_47 |
| [11] | Soumekh M. Synthetic aperture radar signal processing[M]. New York: Wiley, 1999 . |
| [12] | Carrara WG, Goodman RS, Majewski RM. Spotlight synthetic aperture radar: signal processing algorithms[M]. Norwood: MA: Artech House, 1995 . |
| [13] | Gorham LA and Moore LJ, SAR image formation toolbox for MATLAB[C]//SPIE Defense, Security, and Sensing 2010. 2010: 769906. |