


质子治疗是当今最先进的外照射放射治疗手段之一。它比光子治疗有更优越的剂量分布, 能够实现高度适形的精确放疗。因为质子束流的陡峭剂量分布特点, 质子治疗的病人摆位必需保证很高的精确性, 病人摆位系统的机械移动精度必需小于0.1 mm, 治疗时的绝对摆位精度必需在±0.5 mm以内[1~3]。
我们从比利时IBA公司引进的质子治疗系统(PROTEUS 235)采用230 MeV等时回旋加速器, 包括三个等中心旋转机架和一个水平固定束流治疗系统。第一个等中心旋转机架正在进行最后运行调试, 而固定束流系统已于2004年12月正式投入临床使用。笔者针对其病人摆位系统等中心旋转运动的摆位精度做测试评估。
1 材料和方法 1.1 一般材料介绍 1.1.1 病人摆位系统(Patient Positioning System, PPS)主要由治疗床和计算机控制系统组成。治疗床实际上是一台特制的机器人, 能在计算机控制下精确进行六自由度空间运动, 即空间三个轴的位移(横向、纵向、垂向)和空间三个轴的绕轴旋转(旋转、倾斜、翻滚)。
1.1.2 数字影像摆位系统(Digital Image Positioning System, DIPS)主要包括双正交X光球管(Varian A277/A278)、数字影像接收板(Varian Paxscan4030)及工作站软件VIVA。①球管1安装在治疗头内, X射线与质子束流中心轴都校准于房间X轴; 球管2安装在治疗头侧方与球管1成90度正交, X射线中心轴校准于房间Y轴。X轴与Y轴交点为房间的等中心(ISO)。②数字影像接收板上固定有两条垂直相交的细金属丝, 金属丝和交叉点已分别校准到房间的坐标轴和等中心上, 因此成像时金属丝交叉点即代表ISO。③工作站软件VIVA是用来实时采集数字成像接收板上的X射线图像并可将图像进行编辑、处理和分析。(参见图 1 图 2)

|
图 1 固定束流治疗室PPS俯视平面结构图 |

|
图 2 固定束流治疗室PPS侧方剖面结构图 |
① 在PPS治疗床0度(初始摆位位置)将一带杆2 mm直径金属小球固定于床面上接近ISO处并在激光灯参考下移动治疗床将小球粗略校准到ISO。②球管1和球管2分别曝光, 实时采集图像, 利用VIVA软件测算出小球中心点到金属丝交叉点(ISO)的三维位移差值并输给PPS控制系统驱动治疗床自动完成移动校准。③再次分别曝光球管1和球管2, VIVA进行验证, 确保小球已完全校准到ISO。否则重复第二步骤。④在治疗床旋转角度允许范围内(-110°~110°)依次选择-110°、-90°、-60°、-45°、-30°、0°、30°、45°、60°、90°、110°共11个角度分别对治疗床进行等中心旋转运动。当治疗床到达指定位置后, 球管1和球管2依次曝光, VIVA分别测算出小球中心点到ISO的三维位移差值。⑤在不同时间共重复进行了四次上述测量, 得到四组数据, 统计分析测量结果。
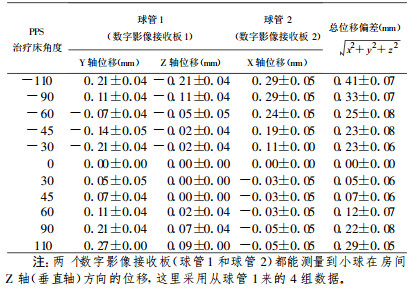
2 结果详细数据见表 1。治疗床在-110°时发生位移最大, X、Y、Z轴方向分别是(0.29 ±0.05) mm、(0.21 ±0.04) mm和(-0.21 ± 0.04) mm, 综合位移偏差是(0.41 ±0.07) mm(1SD)。治疗床在30°时发生位移最小(0°除外), X、Y、Z轴方向分别是(-0.03 ± 0.05) mm、(0.05±0.05) mm和(0.00±0.00) mm, 综合位移偏差是(0.05 ±0.06) mm。所有数据均小于0.5 mm。完全满足质子治疗PPS摆位精度的要求。
|
|
表 1 固定束流治疗室PPS等中心旋转位移偏差(1个标准差) |
为了得到更好的剂量分布, 3D适形放射治疗需要射束能从不同角度照射靶灶, 这就要求治疗头能够绕靶灶为中心进行成角度旋转[4, 5]。质子治疗的等中心旋转机架可以实现这种要求, 患者固定在治疗床上保持不动, 旋转机架载动治疗头绕患者身体长轴做等中心旋转, 射束就可以从任意角度对患者体内靶灶进行治疗[6, 7]。世界上第一个等中心旋转机架质子治疗于1991年在美国罗玛林达大学医学中心(LLUMC)启用。由于等中心旋转机架造价昂贵, 至今世界上绝大多数质子治疗机构仍然只有固定束流[8]。
固定束流因为治疗头不能运动, 为实现多角度等中心照射目的, 就要求患者做相对于治疗头的旋转成角运动。即在保持患者体内靶灶等中心(ISO', 也是本测量中小球的中心点)与房间等中心(ISO)重合的前提下, PPS治疗床载动患者做相对于治疗头的旋转成角运动, 以保证射束能从不同角度照射体内靶灶。这种运动方式便是等中心旋转运动。这是一种很复杂的组合运动: PPS运动的机械旋转轴是床面旋转轴“R”(实轴), 而等中心旋转运动模式要求治疗床床面必须绕等中心旋转轴“ I”(虚轴, 也是房间的Z轴)进行角度旋转。因此在床面旋转时治疗床底座也必须配合相应的水平轴向运动, 才能保证ISO'与ISO的重合。从图 1可以看出, 当治疗床以等中心旋转模式移动到-110°位置时, ISO'与ISO仍保持重合, 但治疗床床面和治疗床底座的实际位置都已经发生了很大的移动变化。
PPS的摆位精确性仅靠组合运动的准确实现是远远不够的, 还必须考虑到以下情况。负荷不同体重的患者时, 治疗床的应力变化也不同。即使是同一患者, 当治疗床底座和床面处在不同位置或因摆位校准时带有一定角度(±3°以内)的倾斜(Pitch)和翻转(Roll)时, 治疗床的应力变化也都不相同。这种即便细微的应力变化也会对PPS各机械部件与运动节点间的几何关系造成影响, 从而使ISO'位置发生偏差。因此必须要有先进可靠的技术来对这种偏差进行自动探测和校正以保证PPS的摆位精度[9]。这种技术就是几何和弹性补偿校正技术(Geometric and Elastic Error Compensation, GEC)。PPS的研发者美国麻省理工学院、哈佛大学麻省总医院、General Atomics和IBA在这方面有很多专门的系统评估和资料论证[10~13]。笔者将就这一技术另做专门论述。
当患者平躺时, 治疗床的等中心旋转可以用来对一些头部肿瘤进行多野成角度照射, 还可以对一些体部(如前列腺)肿瘤进行身体左右两侧的对穿照射[14]。但更常用的方式是在治疗床前端安装一个治疗椅, 使患者可以采用坐姿治疗。这样当治疗床载动治疗椅进行等中心旋转时, 治疗头就可以相对于患者身体的长轴进行旋转, 对头颈部及一些体部肿瘤的治疗就有更大的灵活性[3, 8, 15, 16]。
固定束流的主要缺点是治疗时患者体位的限制。因为计划系统使用的图像来源于CT, CT扫描时患者是平躺仰卧位。而实际治疗中如果采用仰卧位, 则因为射束不能相对于患者身体长轴成角度旋转照射使治疗大受限制。安装治疗椅采用坐姿治疗能有效解决等中心旋转成角度照射的问题, 但必须考虑到因患者由仰卧变成坐姿造成的体内脏器移动对治疗定位的影响。因此, 一般坐姿治疗多是用于对眼部和头颈部这些可以忽略体位变动影响的部位进行质子治疗[3, 8]。
由于固定束流室治疗头不能旋转, 因此PPS必须做相对于治疗头的等中心旋转运动才能实现质子射线对靶灶的等中心多角度照射, 等中心旋转是实现这个目的的关键运动模式。由于质子治疗对靶灶精确定位的严格要求, 这种组合运动的精度在质子治疗摆位中就显得格外重要。文中测量结果数据均小于0.5 mm。完全满足质子治疗PPS摆位精度的要求。当然在我们的实际治疗中, 还要利用先进的电子射野成像技术(EPIDs)通过数字病人摆位系统(DIPS)来实现精准摆位的最终校准和验证。
(王付刚、侯尚杰、王红卫及IBA的Rudi Labarbe先生参加了部份工作, 在此表示感谢!)
| [1] |
Yokohama N, Kagiya G, Maruyama I, et al. New patient positioning system for proton therapy combined with CT with a common treatment couch[J]. Nippon Hoshasen Gijutsu Gakkai Zasshi, 2003, 59(11): 1432-1437. DOI:10.6009/jjrt.KJ00003174075 |
| [2] |
Jacob Van Dyk. The Modern Technology of Radiation Oncology[M]. Medical Physics Publishing, Madison, WI 1999. 824-867.
|
| [3] |
Wioletta Wieszczy cka, Waldemar H. Scharf.Proton radiotherapy accelerators[M]. World scientific publishing Co.Pte.Ltd. 2001, 204-863.
|
| [4] |
Donald W, Kufe.Cancer medicine 6[M]. Hamilton, Ont. BC Decker, 2003, 585-588.
|
| [5] |
Karger CP, Hartmann GH, Heeg P, et al. A method for determining the alignment accuracy of the treatment table axis at an isocentric irradiation facility[J]. Phys Med Biol., 2001, 46(1): 19-26. DOI:10.1088/0031-9155/46/1/404 |
| [6] |
A. Molodojentsev, V. Makoveev, V. Minashkin, et al.Dedicated Proton Accelerator Complex for a Comprehensive Oncology centre[M]. Proceedings of EPAC 2000, Vienna, Austria. 2536-8.
|
| [7] |
L. G. Vorob' ev, M. Pavlovic, et al. Conceptual and Ion-Optical Design of an Isocentric GANTRY for Light Ion Cancer Therapy[R]. Report GSI 98-02, 1998.
|
| [8] |
Hans Breuer, Berend J. Smit. Proton therapy and radiosurgery[J]. Berlin; New York : Springer, 2000, 95-96. |
| [9] |
Marco A.Meggiolaro, Peter C.L.Jaffe, Steven Dubowsky: Achieving Fine Absolute Positioning Accuracy in Large Powerful Manipulators[M]. ICRA, 1999: 2819-2824
|
| [10] |
Meggiolaro M.A., Dubowsky S., Mavroidis C. Error identification and compensation in large anipulators with application in cancer proton therapy[J]. Sba Controle & Automa, 2004, 15(1): 71-77. |
| [11] |
Drouet P., Dubowsky S., Zeghloul S., et al. Compensation of Geometric and Elastic Errors in Large M anipulators with an Application to a High Accuracy Medical System[J]. Robotica, 2002, 20(3): 341-352. |
| [12] |
Drouet, P., Dubowsky, S., and Mavroidis, C. Compensation of Geometric and Elastic Deflection Errors in Large Manipulators Based on Experimental Measurements: Application to a High Accuracy M edical Manipulator[Z]. Proceedings of the Sixth International Symposium on Advances in Robot Kinematics, Strobl, Austria, June 1998, 513-522.
|
| [13] |
J. Flanz, K. Gall, M. Goitein, et al.Design Approach for a Highly Accurate Patient Positioning System for NPTC[Z], Proceedings of the PTCOG XXV and Hadrontherapy Symposium, Belgium, 1996, 1-5.
|
| [14] |
Kerry L.Wright, Dawn Chalaire. New Proton Therapy Center to Deliver Radiation with Precision, Few Side Effects[J]. OncoLog, 2003, 48(6). |
| [15] |
Cirrone G. A. P., Cuttone G., Lojacono, R. A., et al.A 62 MeV proton beam for the treatment of ocular melanoma at Laboratori Nazionali del Sud-INFN (CATANIA)[Z]. Nuclear Science Symposium Conference Record, 2003 IEEE. 5, 3658- 3662.
|
| [16] |
G. Cuttone, G. A. P. Cirrone, N.Romeo, P.A. Lojacono, et al. The CATANA proton therapy beam delivery system[Z]. XXXVI PTCOG MEETING. Catania, Italy.2002.
|