



2. 北京宇航系统工程研究所, 北京 100076
2. Beijing Institute of Astronautical System Engineering, Beijing 100076, China
天平静校时,复位式天平静校系统可以保证所施加的载荷与体轴系一致,有利于提高天平的测量精准度,因此受到天平研究人员的青睐。20世纪90年代中期至今,国内外各主要风洞试验研究机构都相继研制了复位式天平静校系统,国内复位式天平静校系统的综合性能已达到了国际先进水平。例如,CARDC的LBCS-50k[1]及CAAA的ABSC-300[2]都为可同时进行六分量自动加载的复位式静校系统。这类静校系统复位精度高,载荷模拟能力强,非常有利于MDOE方法在天平静校中的研究与应用。但其缺点是设计复杂,研制周期长,建造成本及后期维护费用高昂;由于复位增加了静校时间,势必降低了静校工作效率。两自由度(俯仰和滚转)复位机构也是广泛使用的天平静校支撑方式,其成本较低,静校效率提高,但不能实现在天平纵向与横向同时加载,无法获得相应的交叉干扰系数,同时也不便于MDOE在天平静校中的研究与应用。
在非复位式多元加载静校系统上,通过测量加载头位移(将加载头视为刚体),将载荷转换到体轴系下的静校方法也能获得体轴系天平公式。由于不需要复位,天平支撑机构的设计得到简化,设计难度和建造成本大幅下降。如果在加载点位置设计、位移测量方法以及轴系转换算法3个关键环节上采取科学合理的技术路径,理论上可以获得足够准确的体轴系天平公式。瑞典航空学院采用该方法获得了竖直安装天平的体轴系公式[3, 4]。南京航空航天大学在此基础上建立了水平安装天平的体轴系载荷转换方法[5]。但笔者认为,在以上列举的研究工作中,存在的2点不足会导致较大的天平静校误差,即加载头设计不合理引入了附加力矩,且未考虑位移测量方式引入的位移测量误差。
近期,中国航天空气动力技术研究院二所研制了一套名为BCS-100的六分量非复位式静校系统,并已正式启用。通过优化加载头结构及加载方式,抑制了位移测量方法引入的误差,并完善了载荷轴系转换算法等,获得了一套适应于BCS-100特点的体轴系天平公式静校方法。
1 BCS-100静校系统简介BCS-100静校系统设计定位为技术验证性研制。由于存在一定的技术风险,为避免过大的资金投入,BCS-100静校系统的加载能力设计得较为有限,仅仅能覆盖FD-07高超声速风洞的天平量程范围。其静校加载能力如表 1所示。静校系统由天平支撑机构、天平加载装置及非接触式位移测量子系统构成,如图 1~3所示。天平支撑机构为六自由度串联塔式结构,每层结构负责一个自由度的调整。由砝码重力作为力源直接施加正法向力、俯仰力矩及滚转力矩;通过滑轮、钢带改变砝码重力作用方向后施加其它方向力和力矩。
| 加载分量 | Fx | Fy | Fz | Mx | My | Mz |
| 载荷能力 | 800 | 1000 | 800 | 40 | 104 | 130 |
 |
| 图 1 BCS-100静校系统设计概况 Fig 1 Sketch of the BCS-100 calibration system |
 |
| 图 2 天平静校架 Fig 2 Calibration rig |
 |
| 图 3 天平支撑机构及位移计分布 Fig 3 Rig base and installation of displacement sensor |
加载头刚体运动的线位移及角位移由7台高速高精度激光位移传感器测量,其测量范围为±5mm,精度0.025μm。位移传感器固定在专门设计的独立支架上,不受静校载荷干扰。位移传感器布置如图 4所示。为验证通过位移测量值计算加载头角度变化的准确性,采用光学象限仪和激光位移传感器同时测量多组载荷情况下的角度。2种测量方法的标准差为0.0032°,明显小于力线误差极值0.014°,可认为激光位移传感器测量获得的转角精度满足天平静校要求。
 |
| 图 4 激光位移传感器布置 Fig 4 Arrangement of displacement sensors |
加载头的线位移或角位移m造成n方向上拉线偏转角度可表示为Δθmn,由加载头各位移测点的位移量和拉线长度即可算得力线角度变化量。例如,ΔθxG0即为X轴方向上平移量Δx造成G0方向拉线的偏转角。以法向力Fy为例,通过体轴系和地轴系之间的角度关系,计算地轴系中每个方向上的力在体轴系Fy方向上的分力,再将这些分力合成,即得到法向力Fy的地/体轴系转换公式(1)。其中,Δx、Δy、Δz、Δα、Δβ、Δγ为静校载荷施加后,通过激光位移传感器和其测点到天平校心的距离计算得到的加载头沿3个坐标方向的线位移和角位移。
3 加载头承载点设计优化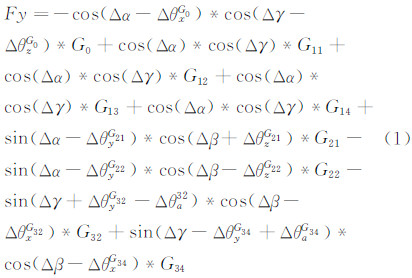
以上推导的载荷地/体轴系转换公式基于一个重要先决条件,即加载头上的所有加载点必须位于加载头水平对称面内,且分别位于加载头纵横2条中心轴线上,如图 5所示。图中绿色圆圈即为加载头上的加载点。以球窝-顶尖形式的传力结构为例,即顶尖与球窝的接触点应在加载头水平对称面内,并且都分别位于加载头纵横2条中心轴线上。这样设计加载点的目的是,在加载头受力变形的时候,力线始终通过加载头的轴线,不会因力线的偏转造成附加力矩,这样就能在不降低转换准确性的前提下大大简化载荷地/体轴系转换公式的推导。而如图 6所示加载头上红色圆圈中的加载点,它们没有落在加载头的中心轴线上,在加载横向载荷时会产生附加力矩,导致载荷地/体轴系转换公式的推导过程非常复杂。但图 6所示的加载头应用在复位式静校架上是没有问题的。对于能实现六分量同时加载的加载头而言,要做到上述要求,设计难度较大。在CAAA现有加载头结构的基础之上,通过优化改进得到了理想的结构形式,可完全满足避免附加力矩的要求。
 |
| 图 5 加载头的加载点位置分布 Fig 5 Design concept of loading sleeve |
 |
| 图 6 不适用于非复位静校的加载头 Fig 6 Unreasonable design of a loading sleeve fornon-repositioning calibration |
加载头的线位移和角位移误差直接决定了载荷轴系转换的准确性。因此,需要分析、评估位移测量方式引入的误差情况并采取措施加以抑制。现以有Δβ时对Δα的测量情况为例,说明位移测量方式引入的角位移误差,如图 7所示。
 |
| 图 7 角位移误差产生原因 Fig 7 The reason for false angle increment |
在天平静校的初始状态,α=β=γ=0。设想,先施加一个侧向载荷,则加载头的纵向轴会偏转Δβ,1#、2#激光位移计测点至OX′轴的距离分别为d1及d2,显然d1>d2;再对加载头施加滚转力矩Mx,则1#、2#激光位移传感器的反射目标面绕OX′转动Δγ,1#、2#激光位移传感器测点的旋转半径即为d1、d2。由于d1>d2,1#位移传感器的测量值Δh1大于2#位移传感器的测量值Δh2,由Δα=arctan[(Δh1-Δh2)/(L1+L2)]知Δα≠0(L1、L2分别为位移计测点距校心的距离)。实际上,仅有侧向载荷和滚转力矩的情况下,加载头是不会发生纵向角位移的,即Δα=0。由此可见,上述Δα≠0的结果是由位移测量方式带来的虚假角度增量(即角位移),需要在载荷地/体轴系转换时进行修正。在六自由度同时考虑这样的修正会导致非常繁琐的推导过程,因此在推导(1)式及其它分量的载荷地/体轴系转换公式时,舍去了这部分高阶小量,故存在一定的误差。若加载头线位移足够小,这时虚假角度增量都为Δβ及Δγ的高阶小量,就可忽略复杂的修正项。经分析计算,加载头的最大线位移为2mm时,由位移测量方式导致的虚假角度增量仅为真实角度增量的0.06%。因此,BSC-100系统在静校天平时采用了短粗支杆,静校完成后再换装吹风支杆进行弹性角标定。
采用短粗支杆进行天平静校除了能有效减小角位移测量误差外,还可以抑制加载头及天平本身重量造成的静校载荷误差。虽然可以在静校前通过负法向力(向上)的配重来平衡加载头及天平的重力,但由于加载时加载头的位移引起了负法向力力线的偏转,配重与加载头及天平的重力不再平衡,并且重心的变化也会产生一个附加力矩。不同变形情况下重力的影响也不相同,因此,会造成静校载荷的系统误差。这个系统误差难以通过解析方式进行修正。通过减小天平及支杆的组合变形、限制加载头位移的方式来降低这个系统误差是目前最为直接的方法。
5 静校及风洞试验结果分析 5.1 静校结果精准度文中介绍的静校方法已用于46台次天平校准,表 2为静校结果指标的平均值。显然,天平静校结果的综合加载重复性和综合加载误差指标均接近《风洞应变天平规范(GJB2244 A -2011)》中规定的先进水平。
| 加载分量 | Fx | Fy | Fz | Mx | My | Mz |
| 综合加载重复性 | 0.04 | 0.02 | 0.06 | 0.07 | 0.08 | 0.03 |
| 综合加载误差 | 0.15 | 0.09 | 0.11 | 0.23 | 0.17 | 0.14 |
为验证本文所述静校方法的准确性,分别采用TG618C天平在复位式静校系统上获得的天平公式与其在BCS-100静校系统上获得的天平公式,对同一次吹风试验的原始数据进行了处理。图 8~10分别为法向力系数CN、俯仰力矩系数CMz及轴向力系数CA随迎角的变化曲线。从图 8和9可以看到,2种静校方法获得的天平公式在计算CN、CMz时一致性非常好,各自的偏差不大于0.5%。然而在计算CA时,特别是在大迎角下,2种结果的偏差相对较大,最高能达到1.1%,如图 10所示。
 |
| 图 8 2种天平公式计算CN~α曲线的比较 Fig 8 Comparison of CN results calculated with two different calibration matrices |
 |
| 图 9 2种天平公式计算CMz~α曲线的比较 Fig 9 Comparison of CMz results calculated with two different calibration matrices |
 |
| 图 10 2种天平公式计算CA~α曲线的比较 Fig 10 Comparison of CA results calculated with two different calibration matrices |
分析后认为,天平轴向力分量公式受静校加载力系方向的影响比较明显[6],因此,无论是复位式静校时的复位精度还是通过非复位式静校结果转换到体轴系时的简化假设,都会造成天平公式准确度的损失,从而导致了2种方法在计算CA的差异。很难通过这样的差异判断2种方法孰优孰劣,并且其差异的绝对值并不大,远小于型号设计部门对CA的测量精度要求。因此可以认为基于载荷地/体轴系转换的非复位式静校方法能够满足风洞测力试验的精准度要求。
6 结论(1) 在非复位式六分量加载静校系统上,通过对天平加载头的非接触式位移测量并进行载荷地/体轴系转换后,获得了天平体轴系校准公式。
(2) 合理的加载头加载点位置设计可避免由于天平及支杆发生组合变形引入的附加力矩,从而简化了载荷地/体轴系转换算法。
(3) 静校时应避免较大的加载头线位移,可对位移测量方式引起的虚假位移不作修正。
(4) 采用本文介绍的静校方法所获得的天平公式与复位式静校方法所获得的天平公式在处理风洞试验数据时,气动力系数结果的一致性较好。
BCS-100静校系统实际上是一套用于技术验证的试验性样机,从目前的应用效果来看,各关键技术得到了较为理想的解决,能够获得较为准确的体轴系天平校准公式。但是还存在一些问题需要精细化研究,比如载荷地/体轴系转换过程中的准确度提升等。BCS-100静校系统的性能将继续得到完善,为今后研制类似大载荷静校系统提供充分的技术储备。
| [1] | Liang Lei, Zhu Benhua. Development of body-axis automatic calibration system for 50kN balance[C]. 8th Int Symposium on Strain Gauge Balances, Lucerne, Switzerland, 2012. |
| [2] | Ma Hongqiang, Bi Zhixian, Chen Ding, et al. Some efforts to improve calibration accuracy in CAAA[C]. 8th Int Symposium on Strain Gauge Balances, Lucerne, Switzerland, 2012. |
| [3] | Hang B, Johnson I. An investigation of method on strain gage wind tunnel balance calibration for a rig without reposition, Part Ⅰ:deduction of algorithms for component corrections[R]. FFA TN 1988-06, 1988. |
| [4] | Hang B, Johnson I. An investigation of method on strain gage wind tunnel balance calibration for a rig without reposition, Part Ⅱ:Comparison of algorithms for component corrections[R]. FFA TN 1988-14, 1988. |
| [5] | 韩步璋,程朴人.风洞天平地轴校正的修正方法[J].航空学报, 1995, 16(6):680-683. |
| [6] | 王金印.应变天平地轴校、体轴校对比的一些问题[J].实验流体力学, 2005, 19(2):103-109. Wang Jinyin. Problems involved in comparison of calibration of strain gage balance in ground coordinate system and body coordinate system[J]. Journal of Experiments in Fluid Mechanics, 2005, 19(2):103-109. |