


2. 中国空气动力研究与发展中心 空气动力学国家重点试验室, 四川 绵阳 621000
2. The State Key Laboratory of Aerodynamics, China Aerodynamics Research and Development Center, Mianyang Sichuan 621000, China
外挂物从母机上分离(发射/投放)的轨迹特性模拟是一项非常重要的试验技术,对母机飞行安全性评估有着极其重要的意义,同时也有助于发射/投放类航空武器的研究和发展。
国外在20世纪60、70年代开始对外挂物分离轨迹模拟试验设备(多自由度捕获轨迹试验装置,即CTS机构)及相关试验技术的进行设计和研究,用于预测/模拟外挂物从母机上分离(发射/投放)的轨迹特性,这些特性包括外挂物的线位移、角位移、线速度、角速度、线加速度和角加速度以及气动载荷等随分离时间的变化。CTS机构运行控制流程主要分为两步:①分离轨迹预测生成;②使用适度控制策略和算法控制机构按生成的轨迹运动。其运动控制具有高复杂性、多变量强耦合等特点,因此最初的轨迹预测/模拟是基于位置控制的,是一种“走-停-走”的控制过程,一条轨 的预测/模拟运行时间较长,导致CTS机构风洞试验效率低下。为此,70年代末,美国Arnold工程发展中心成功实现了基于速度控制的连续动态捕获轨迹试验技术,从而使得同一轨迹的预测/模拟运行时间大大缩短,提高了CTS机构风洞试验效率。
国内在外挂物分离捕获轨迹试验技术领域的研究起步较晚,始于上世纪80、90年代,和国外的研究历程相似,起初的CTS机构运行模式均基于位置控制。图 1为国内某跨声速风洞CTS机构示意图,它首次对连续动态轨迹捕获试验技术进行了系统性研究,既实现了位置控制,又实现了连续动态控制。
 |
| 图 1 国内某跨声速风洞CTS机构示意图 Fig. 1 The CTS in a transonic wind tunnel |
在进行上述跨声速风洞CTS机构吹风试验时,笔者发现现有的外挂物模型天平信号的硬件滤波对轨迹预测的准确性和机构运行的实时性有一定的影响,同时这两者又是矛盾的,为此在适当提高硬件低通滤波截止频率的基础上,引入卡尔曼软件滤波算法,以期改善矛盾,提高吹风效率。 1 动态轨迹预测
分离轨迹的预测生成是捕获轨迹试验技术研究的基础,图 2给出了CTS机构控制原理。
 |
| 图 2 CTS机构控制原理图 Fig. 2 The control principle of the CTS jig |
采集CTS机构当前轨迹点位置信息、六分量天平载荷信号,综合其它相关信息,通过适度算法,预测目标位置值,由单轴(共6个轴)运动控制单元驱动机构各自由度同步运行至目标位置。
设f(k)为天平当前轨迹点载荷信号,包含fx(k)、fy(k)、fz(k)、fα(k)、fβ(k)、fγ(k)6个分量;L(k)为机构当前轨迹点位置,包含x(k)、y(k)、z(k)、α(k)、β(k)、γ(k)6个分量;Vl(k+1)为目标轨迹点理论速度,包含Vlx(k+1)、Vly(k+1)、Vlz(k+1)、Vlα(k+1)、Vlβ(k+1)、Vlγ(k+1)6个分量;L(k+1)为机构目标轨迹点的预测位置,包含x(k+1)、y(k+1)、z(k+1)、α(k+1)、β(k+1)、γ(k+1)6个分量,则可获得机构轨迹预测方程:
式(1)描述为:机构目标轨迹点预测位置为当前轨迹点位置、天平载荷及目标轨迹点理论速度的函数方程,其函数法则Gk根据空气动力学推导获得。 2 连续动态轨迹同步控制方法
无论是最初的基于位置控制的捕获轨迹试验技术,还是后来的基于速度控制的连续动态捕获轨迹试验技术,其控制流程均为“生成目标轨迹点→机构运行至目标轨迹点→生成下一目标轨迹点→机构运行至下一目标轨迹点→……”。
传统的位置控制方法,机构运行至每一目标轨迹点时速度均为零,在等待下一目标轨迹点生成后,再运行至下一目标轨迹点,其运动控制流程是“走-停-走-……”的模式,一条轨迹的运行时间较长,效率低下;而连续动态控制方法,机构是以连续平滑的方式通过每一目标轨迹点,在每一目标轨迹点位置均不需等待,同一轨迹的运行时间大大缩短,效率大为提高。
国内某跨声速风洞CTS机构连续动态轨迹同步控制方法具体步骤描述如下:
(1)通过轨迹预测,实时获得机构目标轨迹点预测位置;
(2)以极小时间间隔ΔT为基准,将当前轨迹点位置至目标轨迹点预测位置的运行轨迹分成N段;
(3)以每段实际起始位置及速度、目标轨迹点预测位置、基准时间、速度极限、加速度极限等信息为输入条件,推导出ΔT时刻后机构目标位置,即下一段起始位置;
(4)将ΔT时刻后机构目标位置作为定位目标输入运动控制系统,由运动控制系统完成机构定位控制;
(5)重复上述步骤,保证机构连续动态地逼近目标轨迹点预测位置,直至该步长运行结束;
(6)重复(1)~(5),直至机构所有轨迹点实时预测并运行结束。
CTS机构在整个轨迹预测和运行过程中,都以发挥机构最大能力为原则,但在某些步长内,可能因某些特殊原因不能发挥机构最大能力时,则需要进行缓冲处理。 2.1 无缓冲的动态轨迹连续同步控制
无缓冲的CTS机构同步过程如图 3所示(图示仅两个自由度)。设当前轨迹点位置为L(k),速度为V(k),目标轨迹点预测位置为L(k+1),速度为V(k+1),将L(k)至L(k+1)步长以时间ΔT为基准分成N段,位置分别为L′k(0)、L′k(1)、L′k(2)、……、L′k(N-1)、L′k(N),各位置点速度为V′k(0)、V′k(1)、V′k(2)、……、V′k(N-1)、V′k(N)。其中L′k(0)即为L(k),L′k(N)即为L(k+1),V′k(0)即为V(k),V′k(N)即为V(k+1)。
基准时间ΔT为一极小值,根据实际情况选取。该步长内N段各点速度由控制系统实时采集获得,各自由度速度极限值为Vmax,加速度极限值为amax。
由机构当前点实际位置及速度、目标轨迹点预测 位置、基准时间ΔT推导下一点机构位置,则有:
式(2)中0≤n<N,描述为:该步长内下一点机构位置为当前点位置、速度、目标轨迹点预测位置、基准时间的函数方程,其函数法则Fk,n由控制系统实时解算获得。
 |
| 图 3 CTS机构同步过程示意(2轴) Fig. 3 The coordinated process of the CTS jig(two-axis) |
通过以下几个约束条件,可以对机构位置更新函数法则Fk,n进行求解:(1)机构不断逼近目标轨迹点预测位置;(2)发挥机构最大运行能力;(3)基准时间 ΔT极小,一般以ms为单位;(4)机构各自由度运行 速度及加速度均不能超出机构运行速度Vmax及加速度极限amax。 2.2 有缓冲的动态轨迹连续同步控制
当遇到特殊情况(如某自由度紧急反向),需要预先对机构进行缓冲处理,缓冲完成后,机构进入目标轨迹点预测位置的同步运行。
CTS机构缓冲同步过程如图 4所示(图示仅两个自由度),L(k)至L(k+1)步长内各点位置推导函数法则仍为:


上式中:V′k,x(m)、V′k,y(m)、V′k,z(m)、V′k,α(m)、V′k,β(m)、V′k,γ(m)为机构在L(k)至L(k+1)步长内第m点各自由度的速度,0≤m<j。
 |
| 图 4 CTS机构缓冲同步过程示意(2轴)Fig. 4 The buffering coordinated process of the CTS jig(two-axis) |
当缓冲完成后,机构即进入目标点预测位置的同步运行,位置更新及函数法则Fk,n求解同2.1。 3 天平信号的实时滤波
由式(1)知:CTS机构当前位置和六分量天平载荷信号直接影响目标点位置的预测,实际应用中,通常采用硬件或软件滤波器对天平信号进行滤波处理,以保证机构轨迹预测的准确,图 5为加入天平信号滤波器的CTS机构控制原理图。
 |
| 图 5 加入滤波器的CTS机构控制原理图Fig. 5 The control principle with filter of the CTS jig |
为充分滤除高频干扰对天平信号的影响,吹风中使用低通滤波器对天平信号进行滤波处理,其低通截止频率分别为10Hz、3Hz和1Hz。
从图 6可知,在采用1Hz低通滤波时,滤波后的 信号相对于3Hz和10Hz是有滞后的;而硬件10Hz滤波后的信号扰动最大,3Hz扰动为其次,1Hz扰动最小。
 |
| 图 6 某型天平硬件10Hz、3Hz、1Hz滤波频率下的数据对比Fig. 6 TheThe comparison of the test results using hardware filtering on 10Hz,3Hz and 1Hz of a balance |
实际应用中,要求滤波滞后应尽量小,同时信号扰动应尽量减少。然而滤波滞后和信号扰动是相互矛盾的,为此,本文采取适当提高硬件低通滤波截止频率,通过后续软件滤波的方法来缓解上述矛盾,将卡尔曼滤波算法引入到CTS机构连续动态控制中,获得了很好的效果。 (1)卡尔曼滤波算法简介
上世纪60年代匈牙利数学家鲁道夫·E·卡尔曼(Rudolf Emil Kalman)在他的博士论文和发表的论文“A New Approach to Linear Filtering and Prediction Problems”中提出了卡尔曼滤波理论,并导出了一套递推估计算法,其基本思想是:采用信号与噪声的状态空间模型,利用前一时刻的估计值和现时刻的观测值来更新对状态变量的估计,求出现时刻的估计值。
系统离散状态方程定义为:
迭代过程如下:
系统时间传播方程为:
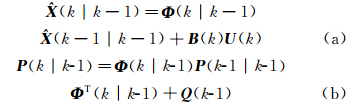
在状态值预测时,忽略B(k)U(k)项,采用下式作为系统时间传播方程:

系统测量修正方程,即滤波增益为:

系统状态更新方程为:
上述“T”表示转置,P(k)为系统状态向量协方差。推导滤波过程按式(a)~(e)循环进行,直到滤波结束。 (2)滤波模型建立
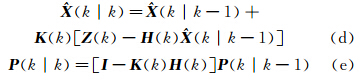
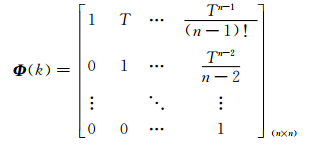
在滤波器模型建立中,引入泰勒中值定理:若函数f(x)在开区间(a,b)上有n+1阶导数,则当函数在(a,b)时,可展开为一个关于(x-x0)的多项式和一个余项的和,其形式为:

式中:x,x0∈(a,b),fn(x0)是f(x)的n阶导数在x0处的值,Rn称为拉格朗日余项。
离散系统中,x(k)代表函数x(t)在t=kT时刻的采样值,其中T为x(t)采样周期。根据泰勒展开式,建立n阶系统离散状态模型。
系统状态向量为:

获得系统状态系数(T表示采样周期)矩阵为:
利用某试验模型进行CTS机构吹风试验。硬件低通滤波频率设为10Hz,控制软件使用2阶卡尔曼滤波器对10Hz硬件滤波后的数据进行再次滤波,取:Qk=diag([1.01.0])、Rk=250.0,系统采样周期为T=0.002s。
图 7给出了风洞马赫数M=0.5,模型天平某方向载荷在硬件10Hz滤波和2阶卡尔曼滤波的数据对比。
 |
| 图 7 10Hz硬件滤波及2阶卡尔曼滤波下的数据对比Fig. 7 The comparison of the test results using hardware filtering on 10Hz and two-rank Kalman filtering |
图 8为风洞马赫数M=0.5,位置控制方式和连续动态控制方式(加入卡尔曼滤波)下,上述试验模型CTS吹风试验的分离轨迹对比。因各车次试验工况不尽相同,导致了图 8中轨迹分离的偏差,该偏差是在机构运行允许范围内的。
 |
| 图 8 位置控制和连续动态控制(加入卡尔曼滤波)分离轨迹对比Fig. 8 The comparison of the test results generated by the move-and-stop control process and the velocity control process |
表 1给出了风洞马赫数M=0.5,位置控制方式和连续动态控制方式(加入卡尔曼滤波)下,上述试验模型不同车次CTS吹风试验的风洞运行时间和耗气量数据。
| 车次号 | 试验参数 | 吹风时间/s | 耗气量/kg | 试验方式 |
| 1 | M=0.5轨迹40点 | 37 | 0.9 | 连续动态控制 |
| 2 | M=0.5轨迹40点 | 38 | 1.0 | 连续动态控制 |
| 3 | M=0.5轨迹40点 | 39 | 0.9 | 连续动态控制 |
| 4 | M=0.5轨迹40点 | 92 | 2.3 | 传统位置控制 |
大量地面和模型吹风试验表明:卡尔曼滤波算法在CTS机构中的应用有效可行,它改善了硬件(主要是1Hz低通)滤波滞后,同时满足系统对数据精度的要求;卡尔曼滤波器的引入对CTS机构分离轨迹的重复性并无不利影响;CTS机构连续动态控制方式大大提高了风洞的吹风效率,节约成本50%以上,其效果已在大量吹风试验中得到充分体现。
| [1] | Hill D W Jr. Development of a velocity control algorithm for controlling a 6-dof trajectory model support[R]. Propulsion Wind Tunnel Facility. Calspan Field Services, Inc./AEDC Division, Arnold Air Force Station, Tennessee. |
| [2] | Roy G. Wind tunnel captive trajectory testing using continuous velocity control[R]. Butler Instrumentation Engineer Propulsion Wind Tunnel Facility, Arnold Air Force Station, Tennessee. |
| [3] | Gargon F, Ph Taravel, Raffin J C. Recent developments in captive trajectory systems of the ONERA modane wind tunnels[C]. 39th Aerospace Sciences Meeting & Exhibit. |
| [4] | Andrew Garrell, Jay Nowakowski, Roman Paryz. Design & development of a new captive trajectory simulation model support system[C]. 35th AIAA/ASME/SAE/ASEE Joint Propulsion Conference and Exhibit, 1999. |
| [5] | Zhu Rusong, Wang Fei, Li Ping, et al. The continuous dynamic simulation test of the captive trajectory system used in 2.4m transonic wind tunnel[C]. CCDC, 2011 |
| [6] | Zhou D H, Wang Q L. Strong tracking filtering of nonlinear systems with colored noise[J]. J of Beijing Institute of Technology, 1997, 17(3): 321-326. |
| [7] | Paulo S R Diniz. Adaptive filtering: algorithms and practical implementation[M]. 刘郁林, 景晓军, 等译. 北京:电子工业出版社. |
| [8] | 黄叙辉, 罗新福, 于志松. FL-24风洞新型捕获轨迹系统设计与发展[J]. 空气动力学学报, 2008, 26(2): 145-149. Huang X H, Luo X F, Yu Z S. Design and development of a new captive trajectory simulation system in FL-24 wind tunnel[J]. Acta Aerodynamica Sinica, 2008, 26(2):145-149. |
| [9] | 黄叙辉, 庞旭东, 宋斌. 1.2m跨超声速风洞新型捕获轨迹系统研制[J]. 实验流体力学, 2008, 22(2): 95-98. Huang X H, Pang X D, Song B. Development of a new captive trajectory simulation system in the 1.2m transonic wind tunnel[J]. Journal of Experiments in Fluid Mechanics, 2008, 22(2): 95-98. |
| [10] | 高勤, 李志强, 都学新. 一种新型自适应卡尔曼滤波算法[J]. 现代雷达, 2001, 12(6): 29-34. Gao Q, Li Z Q, Du X X. A new adaptive Kalman filtering algoritnm[J]. Modern Radar, 2001, 12(6): 29-34. |
| [11] | 范文兵, 刘春风, 张淑贞. 一种强跟踪扩展卡尔曼滤波器的改进算法[J]. 控制与决策, 2006, 36(1): 52-56. Fan W B, Lin C F, Zhang S Z. Improved method of strong tracking extended Kalman filter[J]. Control and Decision, 2006, 36(1): 52-56. |
| [12] | 虞旦, 韦巍, 张远辉. 一种基于卡尔曼预测的动态目标跟踪算法研究[J]. 光电工程, 2009, 21(1): 73-76. Yu D, Wei W, Zhang Y H. Dynamic target tracking with Kalman filter as predictor[J]. Opto-Electronic Engineering, 2009, 21(1): 73-76. |