


0 引言
传统航空数字摄影测量应用通常由飞行平台搭载相机对测区进行竖直摄影,通过竖直影像数据生成数字正射影像、数字线划图、数字高程模型等测绘产品[1]。然而传统单镜头拍摄角度基本为竖直方向,无法真实描述所摄地形地物的情况[2];同时传统双片立体测图是两张俯视影像构建立体像对进行俯视视角的测图,每个点的测量仅由两张影像进行交会而得,导致测绘产品精度受到影响,尤其是高程精度。为解决传统方法的弊端,摄影测量向倾斜摄影的方向发展,拍摄系统变为多镜头,实际中应用较为广泛的为五镜头倾斜摄影拍摄系统。倾斜多镜头拍摄不仅从竖直方向拍摄,而且通过对镜头方向的调整以倾斜的角度进行拍摄,采集了更加丰富的侧面纹理信息[3]。
倾斜摄影测量影像多角度、高重叠度,可以详细描述和恢复地物细节,所以在真三维模型制作方面突显优势[4]。随着近年来计算机软硬件的发展,计算量与计算速度显著提高,因此摄影测量的影像处理方式突破了传统三维建模速度慢、难度大的局限,提高了建模效率,大大降低了制作成本,使大规模三维建模成为可能[5]。随着倾斜摄影测量的发展,三维模型作为新的数据成果模式,也应运而生出新的测图形式——基于三维模型的裸眼三维测图。立体测图与三维测图,两者不仅呈现形式不同,其测图原理也存在差异,通过三维测图测得的数字线划图精度可由分米级提高至厘米级,尤其高程精度甚至可达到与平面精度相当的水平,解决了摄影测量高程精度低的短板。测图精度的提高扩大了摄影测量的应用范围,使大面积高精度测绘成为可能,这是测绘行业的一次伟大变革。
目前对于倾斜摄影测量三维模型构建的研究较为丰富,但对其精度进行系统研究较少,因此结合工程实例分析验证其精度优势及适用比例尺,可为相关生产提供参考依据。
1 双片前方交会与多片前方交会 1.1 摄影测量基础理论在摄影测量中,通过共线方程可以建立起地物点A、投影中心S和对应像点A′之间的数学关系,其几何关系如图 1所示。

|
| 图 1 共线条件 Fig. 1 Collinear condition |
|
|
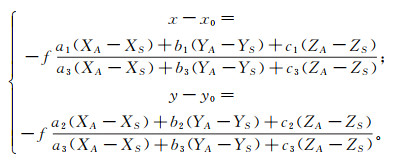
地物点A和投影中心S在摄影测量坐标系D(X、Y、Z) 中,像点A′在像平面坐标系O(x、y)中,结合影像内外方位元素,二维像平面坐标与三维摄影测量坐标建立起推导关系,共线方程可表示为:
 (1)
(1) 其中:
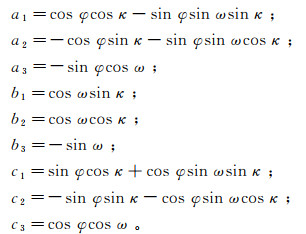
式中:(x, y)为像点A′在像平面坐标系内的坐标;(x0, y0)为投影中心S在像平面坐标系内的坐标;f为相机主距;(XA, YA, ZA)为地物点A在地面摄影测量坐标系内的坐标;(XS, YS, ZS)为投影中心S在物方摄影测量坐标系内的坐标;φ, ω, κ为影像外方位角。简化可得:
 (2)
(2) 其中:
双片前方交会,两张影像中同名点前方交会于相应地物点。为求地物点A(XA, YA, ZA),需要对一个立体像对即两张影像上的一对同名像点A′(x, y)进行前方交会。一对同名像点可列出4个共线方程,通过这4个共线方程,求解出A(XA, YA, ZA)。
求解坐标的精度主要受交会角[6]影响。交会角即同名点映射的同名光线之间的夹角,交会角越小,误差越大,坐标精度越低。无人机因其体积小、飞行姿态差等因素,无法保证交会角的大小。
基于双片前方交会的测图方式为立体测图,在测图过程中,地物点的高程通过人眼进行识别和切准。因此,测图误差来源于交会角和测图粗差。
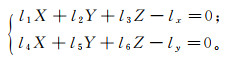
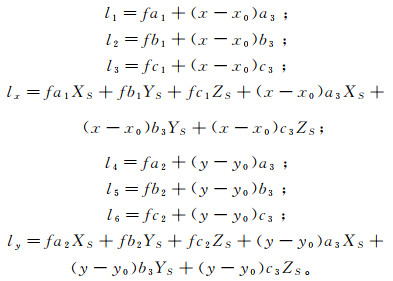
1.3 多片前方交会多片前方交会,通过共线方程和影像内外方位元素,得出多组在不同影像中地物点坐标的近似值,将这些近似值作为地物点在物方坐标系下的观测值,通过误差方程,求解地物点坐标的最优值[7-8]。设地物点的近似坐标为(X, Y, Z),共线方程可表示为:
 (3)
(3) 经线性化后,误差方程表示为:
 (4)
(4) 式中,vx、vy分别为x、y方向上的误差。
通过最小二乘法进行平差计算,改正数通过反复迭代越来越小,直到其小于给定阈值,迭代结束。
多片前方交会充分利用无人机影像重叠率高的特点,突破了传统双片前方交会仅通过一个立体像对计算地物点坐标的局限。当同一地物点在n对影像上量测时,可以列出2n个误差方程式;观测值越多,平差结果越接近真值[9-10]。影像冗余不再是其缺点,而成为其优势,且影像间的交会角不再成为主要的影响因素。
基于多片前方交会的测图方式为裸眼三维测图,地物点坐标信息均呈现在三维模型上,量测的数据精度基本取绝于模型精度,减少了人为判读误差。所以,通过多片前方交会量测采集的地物点坐标信息精度更高。
2 技术路线本文首先对比立体模型与三维模型的精度,以验证多片前方交会精度高于双片前方交会;然后对比竖直实景三维模型与倾斜实景三维模型的精度,以验证基于多片前方交会、采用多镜头倾斜影像数据使模型的精度更高。本文的技术路线如图 2所示。

|
| 图 2 本文技术路线 Fig. 2 Technical route for this article |
|
|
此实验为验证基于多片前方交会的三维模型精度显著优于基于双片前方交会的立体模型,并且其模型精度满足1∶500比例尺的成图标准。
实验测区为某矿区(简记为A测区),面积约10 km2。测区高程为300~830 m,高差约530 m,坡度在25°以上,属于高山地。
对A测区进行外业影像数据采集,结合无人机、相机与测区情况对航线进行规划。航向重叠率与旁向重叠率均为80%,影像地面分辨率为7 cm,共102个像控点。
本实验运用传统摄影测量方法,通过Inpho摄影测量数据处理软件与VitureZo全数字摄影测量系统,进行空中三角测量与立体模型制作[11]。Inpho空中三角测量流程如图 3所示。内业测图人员佩戴立体眼镜在配有立体显卡的电脑上观测立体模型,立体测图如图 4所示。

|
| POS. 定位定向系统(position and orientation system)。 图 3 Inpho空中三角测量流程 Fig. 3 Aerial triangulation flow chart of Inpho |
|
|

|
| 图 4 A测区立体测图 Fig. 4 Stereo mapping of survey area A |
|
|
本实验运用ContextCapture Center软件进行空中三角测量与实景三维模型制作。ContextCapture Center软件主要分为两个模块:主模块和引擎模块。主模块ContextCapture Center Master进行数据输入和处理参数设置,并把处理任务提交给引擎模块ContextCapture Center Engine进行运行处理,使用其内部算法进行空中三角测量和三维重建[12-13]。它突破了传统摄影测量软件需要借助POS数据恢复影像间拓扑关系再进行特征点提取的限制,可以仅通过未经畸变校正的影像和控制点进行特征点提取、空中三角测量与实景三维模型构建,得到实景三维模型,如图 5所示。

|
| 图 5 A测区实景三维模型 Fig. 5 Real-life 3D model of survey area A |
|
|
在测区内布设检查点,分别通过立体测图和三维测图的方式对立体模型和实景三维模型的检查点进行量测,并对其平面误差与高程误差进行统计,结果如图 6、表 1所示。

|
| 图 6 A测区立体模型与实景三维模型误差统计直方图 Fig. 6 Error statistical histogram of stereoscopic model and 3D model in survey area A |
|
|
| cm | |||||||||||||||||||||||||||||
| 项目 | 平面中误差 | 最大平面误差 | 高程中误差 | 最大高程误差 | |||||||||||||||||||||||||
| 立体模型 | 31.54 | 50.72 | ±48.49 | 149.69 | |||||||||||||||||||||||||
| 实景三维模型 | 3.80 | 9.50 | ±5.68 | 12.00 | |||||||||||||||||||||||||
通过统计立体测图和三维测图各点平面误差可知:立体测图平面误差小于10 cm的检查点仅有一个(jcd 11),平面中误差为31.54 cm;三维测图各点平面误差均小于10 cm,平面中误差为3.80 cm。
通过统计立体测图和三维测图各点高程误差可知:立体测图高程误差绝对值在10~50 cm之间的检查点占总检查点的65.625%,高程中误差为±48.49 cm;三维测图高程误差绝对值小于10 cm的检查点占总检查点的93.75%,高程中误差为±5.68 cm。
A测区内树木多,纹理较弱,匹配难度大,为困难测区,因此测图误差较大。对比双片前方交会生成的立体模型与多片前方交会生成的实景三维模型的检查点误差,实景三维模型的精度明显高于立体模型。立体模型无论平面误差还是高程误差均在分米级,而实景三维模型的平面误差和高程误差均在厘米级。结合《数字航空摄影测量空中三角测量规范》[14],立体模型的精度符合规范要求。
4 基于竖直与倾斜摄影测量的三维模型对比实验此实验为验证基于倾斜影像实景三维模型的精度高于基于竖直影像的实景三维模型,并且其模型精度满足1∶500比例尺的成图标准。
实验测区为某采石场(简记为B测区),面积约3.9 km2。测区内高程为90~300 m,高差约210 m,为山地地形。
对B测区进行外业影像数据采集。无人机搭载倾斜相机。竖直镜头焦距为20 mm,数量1个;倾斜镜头焦距35 mm,数量4个。结合无人机、相机与测区情况对航线进行规划。航高为360 m,照片总数为9 340张,航向重叠率与旁向重叠率均为80%,影像地面分辨率为7 cm,共35个像控点,成图比例尺要求为1∶1 000。
本实验仅以影像数据作为变量,竖直实景三维模型采用五镜头影像中的竖直影像作为影像数据,倾斜实景三维模型采用五镜头倾斜影像作为影像数据(图 7、表 2)。两模型均通过ContextCapture Center软件进行空中三角测量与三维模型制作[15]。航带排列、像控点与检查点分布如图 8所示。

|
| a. 竖直实验;b. 倾斜实验。 图 7 B测区曝光点对比图 Fig. 7 Exposure point comparison chart of survey area B |
|
|
| 项目 | 影像数据 | 影像数量 | 像控点数量 | 检查点数量 |
| 竖直实景三维模型 | 竖直影像 | 1 868 | 35 | 36 |
| 倾斜实景三维模型 | 倾斜影像 | 1 868×5 | 35 | 36 |

|
| 图 8 B测区航带排列、像控点与检查点分布图 Fig. 8 Distribution map of airline arrangement, control points and checkpoints in survey area B |
|
|
如图 9所示:竖直影像与倾斜影像均能完成三维建模,但竖直实景三维模型在某些部分会产生漏洞和扭曲的现象(图 9b、d、f),同地区倾斜影像生成的三维模型则没有出现这种现象(图 9a、c、e)。分析出现这种现象原因,此地区为梯田,纹理单一重复,是影像匹配较为困难的地区。虽然在空中三角测量过程中影像都成功进行了相对定向,但提取的特征点较少,稀疏点云过于稀疏(图 9g、h),无法描述模型特征。在三维重建的密集匹配过程中,匹配出的密集点云也不足以对此地区的地形地物进行正确而细致的表达,出现模型漏洞;甚至密集点云中存在因误匹配而产生的错点,导致了模型扭曲。对比同地区倾斜实景三维模型,生成完整正确,说明此处的竖直影像重叠不足,无法提取足够多的特征点和密集点云。

|
| a. 倾斜实景三维模型;b. 竖直实景三维模型;c、d. 分别为倾斜、竖直实景三维模型细节1;e、f. 分别为倾斜、竖直实景三维模型细节2;g、h. 分别为倾斜、竖直实景三维模型稀疏点云。 图 9 测区实景三维模型对比图 Fig. 9 Real-life 3D model comparison chart of survey area B |
|
|
在B测区内设置检查点,通过模型检查点三维坐标与实测坐标进行对比,检查点平面误差与高程误差如图 10所示,中误差及最大误差如表 3所示。

|
| 图 10 B测区影像对比实验误差统计直方图 Fig. 10 Error statistical histogram of image contrast experiment in survey area B |
|
|
| cm | |||||||||||||||||||||||||||||
| 模型 | 平面 | 高程 | 等高线 | ||||||||||||||||||||||||||
| 中误差 | 最大误差 | 中误差 | 最大误差绝对值 | 高程中误差 | 最大高程误差绝对值 | ||||||||||||||||||||||||
| 竖直实景三维模型 | 6.36 | 13.27 | ±12.23 | 25.20 | |||||||||||||||||||||||||
| 倾斜实景三维模型 | 4.73 | 13.35 | ±4.60 | 10.20 | ±21.8 | 44.5 | |||||||||||||||||||||||
在平面误差方面:竖直实景三维模型平面误差在5 cm以下的检查点占44.44%,5~10 cm之间的占47.22%,平面误差大于10 cm检查点的有3个(jcd 10、jcd 30、jcd 35),平面中误差为6.36 cm;倾斜实景三维模型平面误差在5 cm以下的检查点有26个,占总检查点的72.22%,误差大于10 cm的检查点仅1个(jcd 13),平面中误差为4.73 cm。
在高程误差方面:竖直实景三维模型高程误差绝对值在5 cm以下的检查点占27.78%,5~10 cm之间的占22.22%,大于10 cm的占50%,高程中误差为±12.23 cm;倾斜实景三维模型高程误差绝对值在5 cm以下的检查点有27个,占总检查点的75%,高程误差大于10 cm的检查点仅1个(jcd 02),且为10.2 cm,高程中误差为±4.60 cm。
B测区倾斜实景三维模型的平面精度与高程精度均高于竖直实景三维模型,高程中误差由分米级提高至厘米级,与平面精度相当,中误差均在5 cm以内。
以倾斜实景三维模型为基础,通过三维测图的方式对测区进行数字线划图的制作,等高线如图 11所示。为检查数字线划图中等高线是否符合规范中的精度要求,在测区内测得33个高程检查点,通过对等高线进行内插,并与实测高程点进行比较,得到检查点误差如图 12和表 3所示所示,分析等高线的精度。

|
| 图 11 B测区数字线划图 Fig. 11 Digital line graphic of survey area B |
|
|

|
| 图 12 B测区基于倾斜模型的数字线划图中等高线误差统计直方图 Fig. 12 Error statistical histogram of contour line of digital line graphic based on tilt model in survey area B |
|
|
B测区基于倾斜实景三维模型制作的数字线划图等高线的中误差为±21.8 cm,最大误差为-44.5 cm(gc10),最小误差为-0.2 cm(gc17)。根据《1∶500 1∶1 000 1∶2 000地形图航空摄影测量内业规范》[16]中对等高线的精度要求,山地地形的测区在1∶500比例尺的地形图中等高线中误差不得大于70 cm, 本实验中误差完全符合规范要求。
倾斜实景三维模型的精度高于竖直实景三维模型。在高差较大的山地地形测区,倾斜实景三维模型显著提高了高程精度,约提高62%,可达到与平面精度相当的精度水平。模型精度可满足生产1∶500比例尺地形图。
5 结论1) 相比于竖直摄影测量,倾斜摄影测量的交会光线更多,精度也更高。山地测区倾斜实景三维模型的平面和高程中误差均可达到5 cm以内,基于其进行三维测图,数字线划图中等高线的误差为±21.8 cm,完全符合《1∶500 1∶1 000 1∶2 000地形图航空摄影测量内业规范》中对1∶500比例尺的测图精度要求。
2) 倾斜摄影测量将摄影测量测图精度从分米级提升至厘米级,显著提高了高程精度,实验也验证了其在山地、高山地测区进行1∶500比例尺测图的可行性,为对相关的生产提供参考依据。因此,倾斜摄影测量在大范围大比例尺地形图测绘中具有非常高的实用价值。
| [1] |
林卉, 王仁礼. 数字摄影测量学[M]. 徐州: 中国矿业大学出版社, 2015. Lin Hui, Wang Renli. Digital Photogrammetry[M]. Xuzhou: China University of Mining and Technology Press, 2015. |
| [2] |
李明. 基于倾斜影像的城市三维场景重建若干关键技术研究[D]. 武汉: 武汉大学, 2016. Li Ming. Key Technologies Research of City Three-Dimensional Scene Reconstruction Based on Oblique Images[D]. Wuhan: Wuhan University, 2016. |
| [3] |
李英杰. 航空倾斜多视影像匹配方法研究[D]. 北京: 中国测绘科学研究院, 2014. Li Yingjie. Research on Multi-View Matching Method of Multiple Aerial Image[D]. Beijing: Chinese Academy of Surveying and Mapping, 2014. |
| [4] |
Zhen W, Zou J, Zhao X, et al. Research on 3D Modeling Technology Based on Digital Photogrammetry[C]//Sixth International Conference on Digital Earth. Beijing: ISDE, 2009: 1-7.
|
| [5] |
周杰. 倾斜摄影测量在实景三维建模中的关键技术研究[D]. 昆明: 昆明理工大学, 2017. Zhou Jie. Research on the Key Technology of Oblique Photogrammetry in 3D Modeling of Real Scene[D]. Kunming: Kunming University of Science and Technology, 2017. |
| [6] |
Jeschke W. Digital Close-Range Photogrammetry for Surface Measurement[C]//Close-Range Photogrammetry Meets Machine Vision. [S. l. ]: The International Society for Optical Engineering, 2017: 1058.
|
| [7] |
吴迪军, 张萌萌, 潘飞, 等. 多片前方交会法无人机测图技术[J]. 测绘科学, 2018, 43(10): 125-130. Wu Dijun, Zhang Mengmeng, Pan Fei, et al. Unmanned Aerial Vehicles Mapping Technology of Multiple Images Space Forward Intersection[J]. Science of Surveying and Mapping, 2018, 43(10): 125-130. |
| [8] |
鲁勇奇, 郭佳郁, 冯振贵. 浅谈两点前方交会角对测点的精度影响[J]. 海峡科技与产业, 2017(7): 122-123. Lu Yongqi, Guo Jiayu, Feng Zhengui. Talking About the Influence of the Intersection Angle of Two Points on the Accuracy of the Measuring Point[J]. Technology and Industry Across the Straits, 2017(7): 122-123. |
| [9] |
李忠美, 边少锋, 瞿勇. 多像空间前方交会的抗差总体最小二乘估计[J]. 测绘学报, 2017, 46(5): 593-604. Li Zhongmei, Bian Shaofeng, Qu Yong. Robust Total Least Squares Estimation of Space Intersection Appropriate for Multi-Images[J]. Acta Geodaetica et Cartographica Sinica, 2017, 46(5): 593-604. |
| [10] |
张剑清, 胡安文. 多基线摄影测量前方交会方法及精度分析[J]. 武汉大学学报(信息科学版), 2007, 32(10): 847-851. Zhang Jianqing, Hu Anwen. Multi-Baseline Photogrammetry Forward Intersection Method and Accuracy Analysis[J]. Geomatics and Information Science of Wuhan University, 2007, 32(10): 847-851. |
| [11] |
隋婧, 金伟其. 双目立体视觉技术的实现及其进展[J]. 电子技术应用, 2004(10): 4-6. Sui Jing, Jin Weiqi. Realization and Progress of Binocular Stereo Vision Technology[J]. Application of Electronic Technique, 2004(10): 4-6. DOI:10.3969/j.issn.0258-7998.2004.10.002 |
| [12] |
宋文平. 无人机航测系统集成及影像后处理有关问题研究[D]. 西安: 长安大学, 2016. Song Wenping. Research on Integration of Low Altitude Remote Sensing System of UAV and Related Questions of Image Data Processing[D]. Xi'an: Chang'an University, 2016. |
| [13] |
李伟哲. 基于ContextCapture实景建模及应用[J]. 西北水电, 2018(3): 27-31. Li Weizhe. Real Scene Modeling and Application Based on ContextCapture[J]. Northwest Hydropower, 2018(3): 27-31. DOI:10.3969/j.issn.1006-2610.2018.03.008 |
| [14] |
数字航空摄影测量空中三角测量规范: GB/T 23236-2009[S]. 北京: 中国标准出版社, 2009. Specifications for Aerotriangulation of Digital Aerophotogrammetry: GB/T 23236-2009[S]. Beijing: China Quality and Standards Publishing & Media Co Ltd, 2009. |
| [15] |
范攀峰, 李露露. 基于Smart3D的低空无人机倾斜摄影实景三维建模研究[J]. 测绘通报, 2017(增刊2): 77-81. Fan Panfeng, Li Lulu. A Three-Dimensional Modeling Study Based on the Technique of Low-Altitude UAV Oblique Photogrammetry and Smart3D Software[J]. Bulletin of Surveying and Mapping, 2017(Sup. 2): 77-81. |
| [16] |
1: 5001: 10001: 2000地形图航空摄影测量内业规范: GB/T 7930-2008[S]. 北京: 中国标准出版社, 2008.
|
| [30] |
Specifications for Aerotriangulation Office Operation of 1: 5001: 10001: 2000 Topographic Maps: GB/T 7930-2008[S]. Beijing: China Quality and Standards Publishing & Media Co Ltd, 2008.
|